Wio Terminal IMU Sensor
In this section, we will detail how the sensors work, how to get sensor data using Wio Terminal and how to send the data out using Wio Terminal & Grove - Wio-E5.
Upgradable to Industrial Sensors
With the SenseCAP S2110 controller and S2100 data logger, you can easily turn the Grove into a LoRaWAN® sensor. Seeed not only helps you with prototyping but also offers you the possibility to expand your project with the SenseCAP series of robust industrial sensors.
The IP66 housing, Bluetooth configuration, compatibility with the global LoRaWAN® network, built-in 19 Ah battery, and powerful support from APP make the SenseCAP S210x the best choice for industrial applications. The series includes sensors for soil moisture, air temperature and humidity, light intensity, CO2, EC, and an 8-in-1 weather station. Try the latest SenseCAP S210x for your next successful industrial project.







Working Principle of Sensors
In this section we need to learn to use the IMU sensor built into the Wio Terminal.
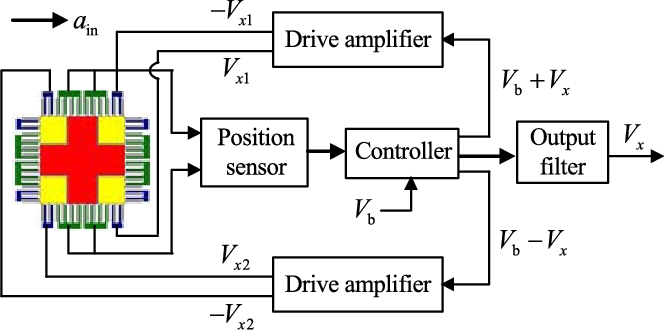
The LIS3DHTR acceleration sensor is a piezoelectric sensor, which converts the acceleration of the object to be measured into the change of the voltage of the sensing unit, and then converts the value of the change of the sensing unit into a voltage value through a conversion circuit, followed by the corresponding amplification of the signal and the filtering process to process the analog quantity into a suitable and stable output signal, at which time the output signal is a voltage value, and finally converted into a digital signal through an ADC converter.
For more information on the use of IMU sensors its reference here.
Materials Required
 |  |
| Wio Terminal | Grove - Wio-E5 |
Preliminary Preparation
Connection
In this routine, we need to connect to a nearby LoRa® gateway with the help of Grove LoRa® E5. We need to configure the Grove port on the right side of the Wio Terminal as a soft serial port to receive AT commands.

Why not use the Grove port on the left?
The Grove interface on the left is IIC capable, and we use the IIC interface for most sensors, so keeping it is a better solution.
Software preparation
Step 1. You need to Install an Arduino Software.

Step 2. Launch the Arduino application.
Step 3. Add Wio Terminal to the Arduino IDE.
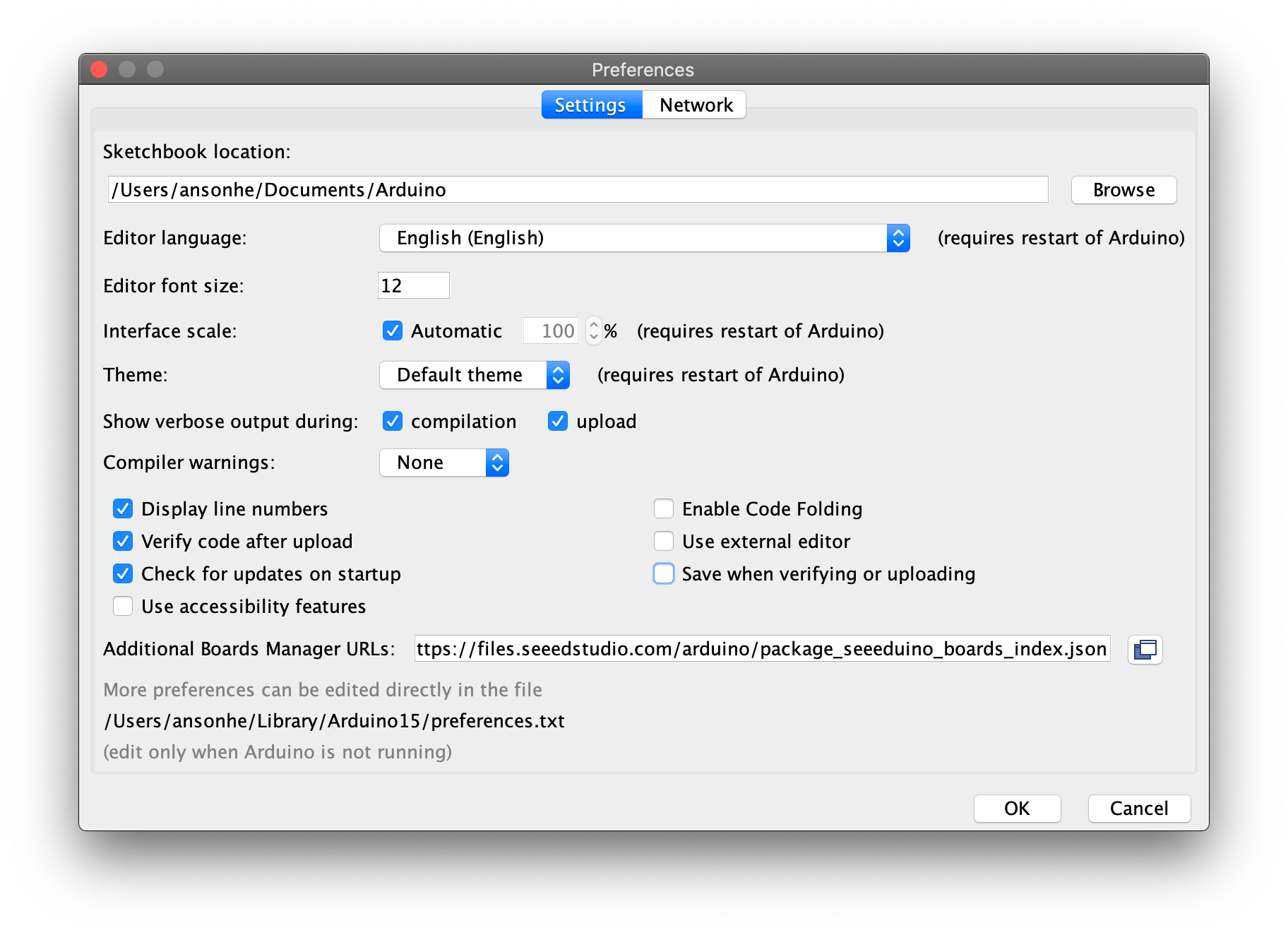
Open your Arduino IDE, click on File > Preferences, and copy below url to Additional Boards Manager URLs:
https://files.seeedstudio.com/arduino/package_seeeduino_boards_index.json
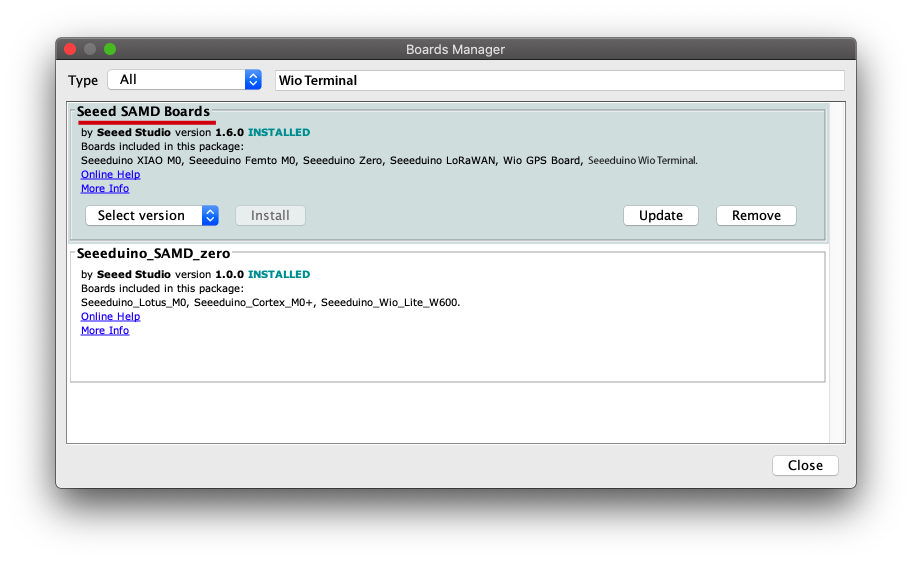
Click on Tools > Board > Board Manager and Search Wio Terminal in the Boards Manager.
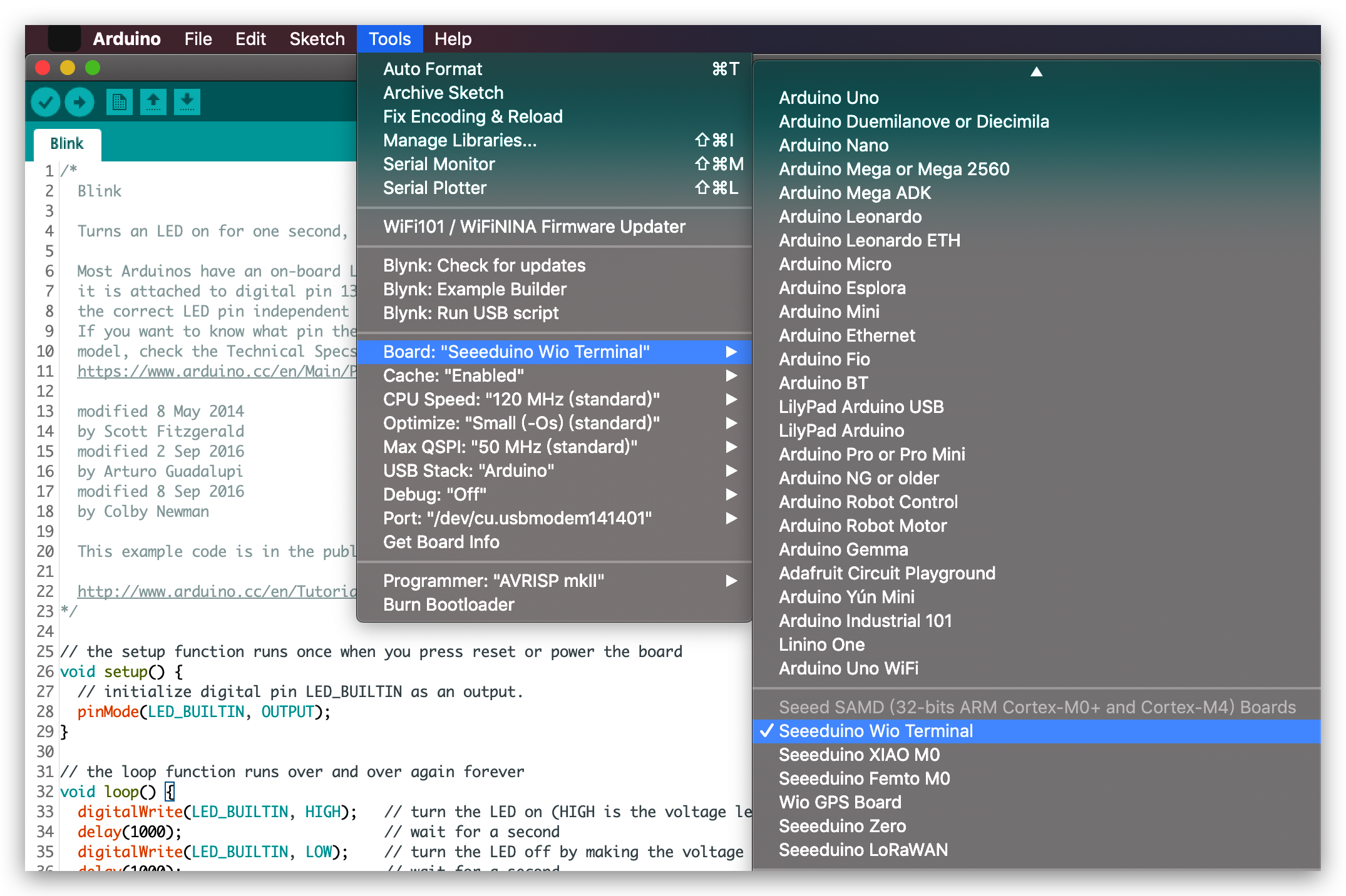
Step 4. Select your board and port
You'll need to select the entry in the Tools > Board menu that corresponds to your Arduino. Selecting the Wio Terminal.
Select the serial device of the Wio Terminal board from the Tools -> Port menu. This is likely to be COM3 or higher (COM1 and COM2 are usually reserved for hardware serial ports). To find out, you can disconnect your Wio Terminal board and re-open the menu; the entry that disappears should be the Arduino board. Reconnect the board and select that serial port.
For Mac User, it will be something like /dev/cu.usbmodem141401.
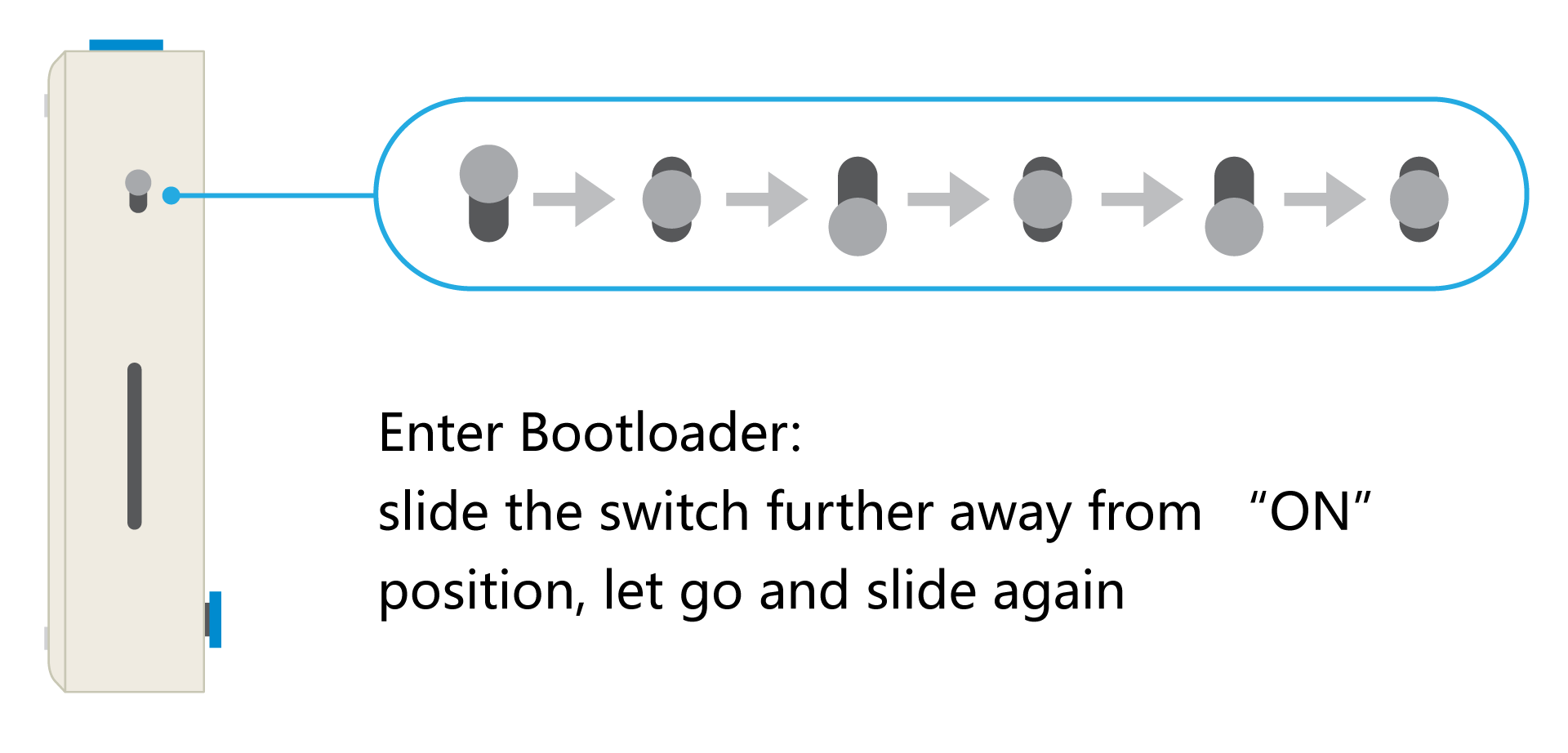
If you are not able to upload the sketch, mostly it's because Arduino IDE was not able to put Wio Terminal to bootloader mode. (Because MCU was halted or your program handling USB) Workaround is putting your Wio Terminal to bootloader mode manually.
Step 5. Download Grove - Wio-E5 Library
Visit the Disk91_LoRaE5 repositories and download the entire repo to your local drive.
Step 6. Adding libraries to the Arduino IDE
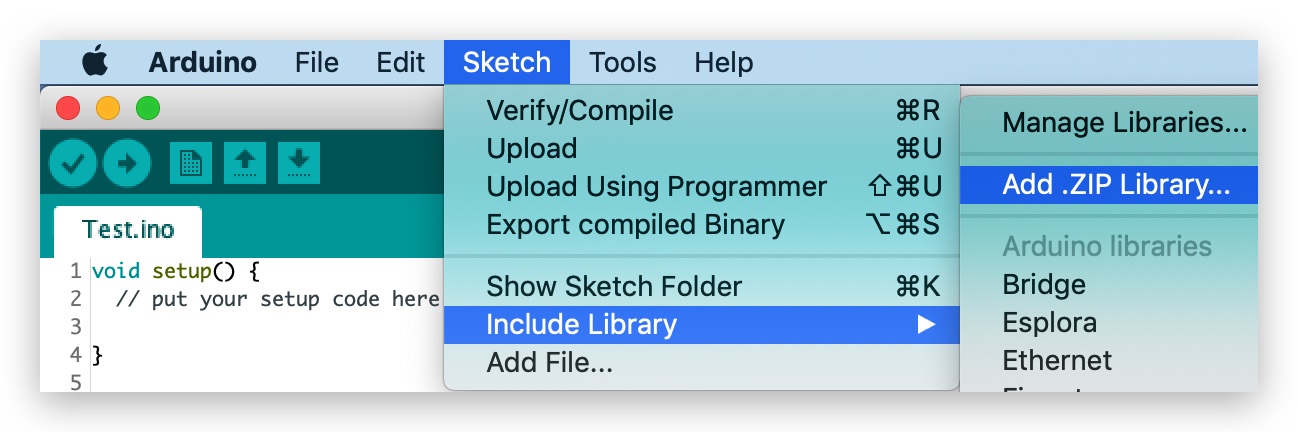
Now, the 3-Axis Digital Accelerometer library can be installed to the Arduino IDE. Open the Arduino IDE, and click sketch -> Include Library -> Add .ZIP Library, and choose the Disk91_LoRaE5 file that you've have just downloaded.
Get the value of the built-in IMU sensor of Wio Terminal
Step 1. Download IMU Code Library
Visit the Seeed_Arduino_LIS3DHTR repositories and download the entire repo to your local drive.
Step 2. Adding libraries to the Arduino IDE
Now, the 3-Axis Digital Accelerometer library can be installed to the Arduino IDE. Open the Arduino IDE, and click sketch -> Include Library -> Add .ZIP Library, and choose the Seeed_Arduino_LIS3DHTR file that you've have just downloaded.
Step 3. Obtain IMU sensor 3-axis data
This repo demonstrates how to use the built-in IMU sensor as a component in Wio Terminal. Using the library's getAccelerationX(), getAccelerationY(), and getAccelerationZ() functions, you can directly obtain the X-axis, Y-axis, and Z-axis offsets of the IMU sensor. These three values may be positive or negative float numbers.
#include"LIS3DHTR.h"
LIS3DHTR<TwoWire> lis;
void setup() {
Serial.begin(115200);
lis.begin(Wire1);
if (!lis) {
Serial.println("ERROR");
while(1);
}
lis.setOutputDataRate(LIS3DHTR_DATARATE_25HZ); //Data output rate
lis.setFullScaleRange(LIS3DHTR_RANGE_2G); //Scale range set to 2g
}
void loop() {
float x_values, y_values, z_values;
x_values = lis.getAccelerationX();
y_values = lis.getAccelerationY();
z_values = lis.getAccelerationZ();
Serial.print("X: "); Serial.print(x_values);
Serial.print(" Y: "); Serial.print(y_values);
Serial.print(" Z: "); Serial.print(z_values);
Serial.println();
delay(50);
}
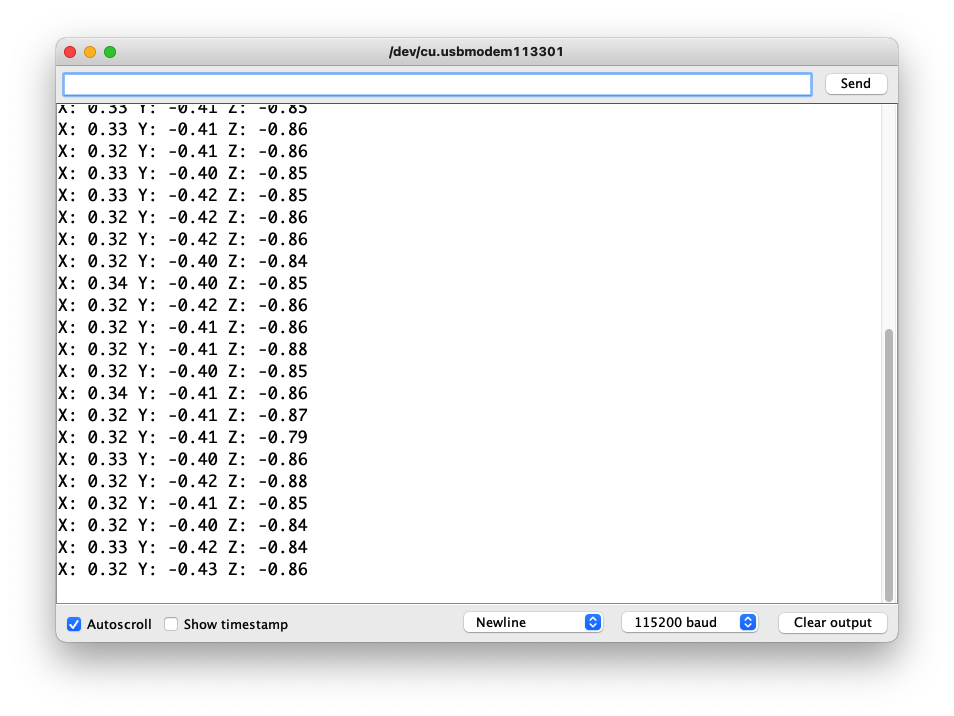
Open the serial monitor of Arduino IDE and select the baud rate as 115200 and observe the result.
Send data via Grove - Wio-E5
We combine the previous code of Grove - Wio-E5 to connect to the LoRa® network. Using the AT command it is possible to send the value of the IMU sensor to the LoRa® network.
As we know from the code in the section above to get the IMU sensor value, the IMU sensor values are three separate float numbers that may have both positive and negative values, and are accurate to two decimal places.
Due to the limitations of sending data, we first need to solve the problem of converting float numbers to integers on the sending side to ensure that the data sent is an integer, so we multiply all three axes of data by 100.
In this way, we determine the content, size and format of the data to be sent via the AT command. We might as well set up a large enough array, store the strings we need to send into the array, and finally use the send_sync() function to send the array out.
The pseudo-code for the above idea is roughly as follows.
......
float x_values, y_values, z_values;
x_values = lis.getAccelerationX();
y_values = lis.getAccelerationY();
z_values = lis.getAccelerationZ();
int x = x_values*100;
int y = y_values*100;
int z = z_values*100;
static uint8_t data[6] = { 0x00 }; //Use the data[] to store the values of the sensors
data_decord(x, y, z, data);
if ( lorae5.send_sync( //Sending the sensor values out
8, // LoRaWan Port
data, // data array
sizeof(data), // size of the data
false, // we are not expecting a ack
7, // Spread Factor
14 // Tx Power in dBm
)
)
......
The rest of what we need to do is to use the begin() function to initialize Grove - Wio-E5 and the setup() function to configure the triplet information of Grove - Wio-E5. When we send a data message using the send_sync() function, we will try to join the LoRaWAN® at the same time, and once it succeeds, the data will be sent and information such as signal strength and address will be returned.
The full code example can be found here.
We do not recommend that you upload the code now to see the results, because at this point you have not yet configured Helium/TTN and will get a "Join failed" result. We recommend that you upload this code after you have completed the Connecting to Helium or Connecting to TTN chapter to complete the complete data sending process.
Once you have experienced and understood how the IMU sensor works and the data format, please continue with the next step of the tutorial join LoRaWAN®.
| Helium Section | |
| Helium Introduction In this chapter, we will introduce the Helium console controls that we use to get a first impression of the Helium console. Jump to chapter > |
| Connecting to Helium This section describes how to configure Helium so that sensor data can be successfully uploaded to and displayed in Helium. Jump to chapter > |
| TTN Section | |
| TTN Introduction In this chapter, we will introduce the TTN console controls that we use to get a first impression of the TTN console. Jump to chapter > |
| Connecting to TTN This section describes how to configure TTN so that sensor data can be successfully uploaded to and displayed in TTN. Jump to chapter > |




Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
Statement
- The LoRa® Mark is a trademark of Semtech Corporation or its subsidiaries.
- LoRaWAN® is a mark used under license from the LoRa Alliance®.