Weekly Wiki
Greetings
This is Frank in Seeed Studio and welcome to the Seeed Studio weekly wiki! Each Monday, I will introduce you our latest wiki, including the ones related to our new products, the interesting projects published by Seeed Studio, and the tutorials, introductions, etc... You name it.
✨ For each week, when a collaborator contributes a project or fixes something important, we put the stars at the end of title of "Weekly Wiki" for more people be able to see their efforts👍.
Today is May 11th, and a brand new week has begun! Check out what Seeed Studio did last week!
Latest Wiki Launched
Add Voice Interaction to Your LeKiwi Robot with reSpeaker Flex
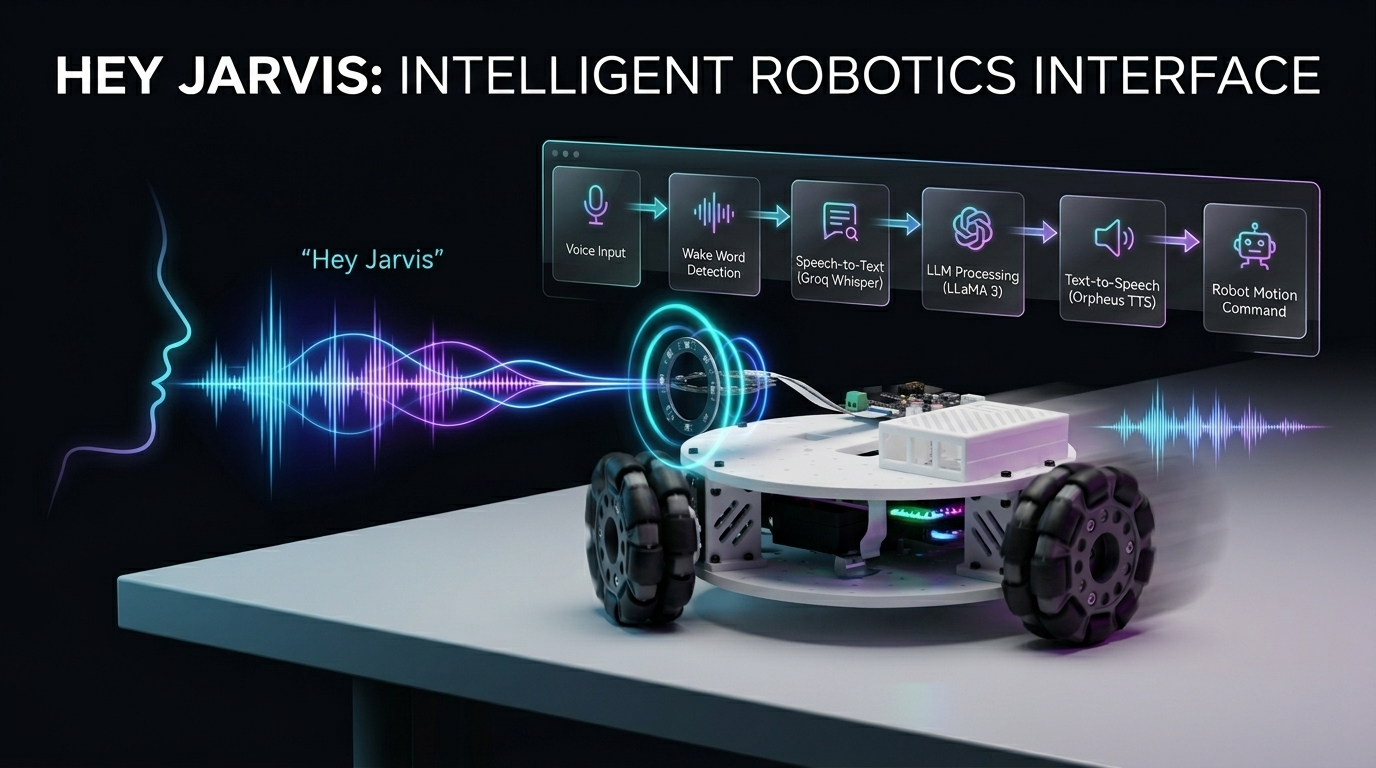
Control a 3-wheeled Kiwi-drive robot with your voice! This project combines a Seeed Studio XIAO ESP32 (motor controller) with a Raspberry Pi (voice processing brain), enhanced by the reSpeaker Flex for high-quality audio capture and Voice Embeddings for smarter, more personalized voice interaction. Using natural language commands, you can drive, steer, and control the robot completely hands-free with improved accuracy and responsiveness.
reBot Arm B601-DM ROS2 Integration Guide

This tutorial shows how to run the ROS2 control workspace rebotarm_ros2 for the reBot Arm B601-DM. The workspace wraps the low-level reBotArm_control_py Python SDK into ROS2 topics, services, and actions, making it easier to integrate upper-level planning, visual grasping, RViz visualization, and custom application development.
UDP Face Analysis with reCamera
This document introduces a real-time face analysis solution based on reCamera, using YOLO and FairFace models to detect faces and analyze age, gender, race, and emotions, while streaming annotated video frames to a PC via UDP in real time.
XIAO ESP32-C5 With Zephyr(RTOS)

This document introduces how to develop with Zephyr RTOS on the XIAO ESP32-C5, including environment setup, firmware building and flashing, GPIO and USB configuration, and practical examples using display expansion boards and peripherals.
Get Started with MeshCore Remote Terminal
This wiki will introduce Remote Terminal for MeshCore (RemoteTerm) to provide an interface for MeshCore devices to transmit messages. This tutorial provides a fundamental setup for running RemoteTerm on a Raspberry Pi using the Seeed XIAO ESP32S3 & SX1262 Kit as a companion radio and Raspberry Pi Zero 2W for a compact, all-in-one MeshCore solution for power users!
How to use bacnet MS/TP with R1225

This article mainly introduces how to perform functional testing of bacnet MS/TP protocol on reComputer R1225.We simulated a bacnet MS/TP server on reComputer R1225, and then used YABE on the W10 PC to check whether the device is present. If the device we simulated can be found normally, it means that the bacnet MS/TP communication is normal.
How to use rs485 and modbus with R1225
This article mainly introduces how to use the 485 communication function of reComputer R1225, and tests the RS485 and Modbus communication functions.
The Efforts of Contributor
- Check on GitHub for more information.
- We will be really appreciate if you can share your ideas with us!
Past Weekly wiki
Click here
- weekly wiki on 2025.1.06th
- weekly wiki on 2025.1.13th
- weekly wiki on 2025.1.20th
- weekly wiki on 2025.1.27th
- weekly wiki on 2025.2.10th
- weekly wiki on 2025.2.17th
- weekly wiki on 2025.2.24th
- weekly wiki on 2025.3.03rd
- weekly wiki on 2025.3.10th
- weekly wiki on 2025.3.17th
- weekly wiki on 2025.3.24th
- weekly wiki on 2025.3.31st
- weekly wiki on 2025.4.07th
- weekly wiki on 2025.4.14th
- weekly wiki on 2025.4.21st
- weekly wiki on 2025.4.28th
- weekly wiki on 2025.5.05th
- weekly wiki on 2025.5.12th
- weekly wiki on 2025.5.19th
- weekly wiki on 2025.5.26th
- weekly wiki on 2025.6.02nd
- weekly wiki on 2025.6.09th
- weekly wiki on 2025.6.16th
- weekly wiki on 2025.6.23rd
- weekly wiki on 2025.6.30th
- weekly wiki on 2025.7.07th
- weekly wiki on 2025.7.14th
- weekly wiki on 2025.7.21st
- weekly wiki on 2025.7.28th
- weekly wiki on 2025.8.04th
- weekly wiki on 2025.8.11th
- weekly wiki on 2025.8.18th
- weekly wiki on 2025.8.25th
- weekly wiki on 2025.9.01st
- weekly wiki on 2025.9.08th
- weekly wiki on 2025.9.15th
- weekly wiki on 2025.9.22nd
- weekly wiki on 2025.9.29th
- weekly wiki on 2025.10.13th
- weekly wiki on 2025.10.20th
- weekly wiki on 2025.10.27th
- weekly wiki on 2025.11.03rd
- weekly wiki on 2025.11.10th
- weekly wiki on 2025.11.17th
- weekly wiki on 2025.11.24th
- weekly wiki on 2025.12.01st
- weekly wiki on 2025.12.08th
- weekly wiki on 2025.12.15th
- weekly wiki on 2025.12.22nd
- weekly wiki on 2025.12.29th
- weekly wiki on 2026.1.05th
- weekly wiki on 2026.1.12th
- weekly wiki on 2026.1.19th
- weekly wiki on 2026.1.26th
- weekly wiki on 2026.2.02nd
- weekly wiki on 2026.2.09th
- weekly wiki on 2026.3.02nd
- weekly wiki on 2026.3.09th
- weekly wiki on 2026.3.16th
- weekly wiki on 2026.3.23rd
- weekly wiki on 2026.3.30th
- weekly wiki on 2026.4.06th
- weekly wiki on 2026.4.13th
- weekly wiki on 2026.4.20th
- weekly wiki on 2026.4.27th