Getting Started with AC1

Introduction
Active Camera, invented by RoboSense, is a groundbreaking category in robotic vision designed to tackle the challenges of mobility perception and operational cognition.
The AC1, the first in this series, integrates multiple sensors to deliver hardware-level fusion of depth information, image data, and motion posture data, synchronized in time and space. This enables robots to capture comprehensive environmental details, overcoming interference from sunlight and highly reflective surfaces, and adapting to diverse indoor and outdoor scenarios.
In this wiki, we will demonstrate the detailed process of using AC1 together with reComputer Robotics.
Prerequisites
| AC1 | reComputer Robotics J4012 |
|---|---|
|  |
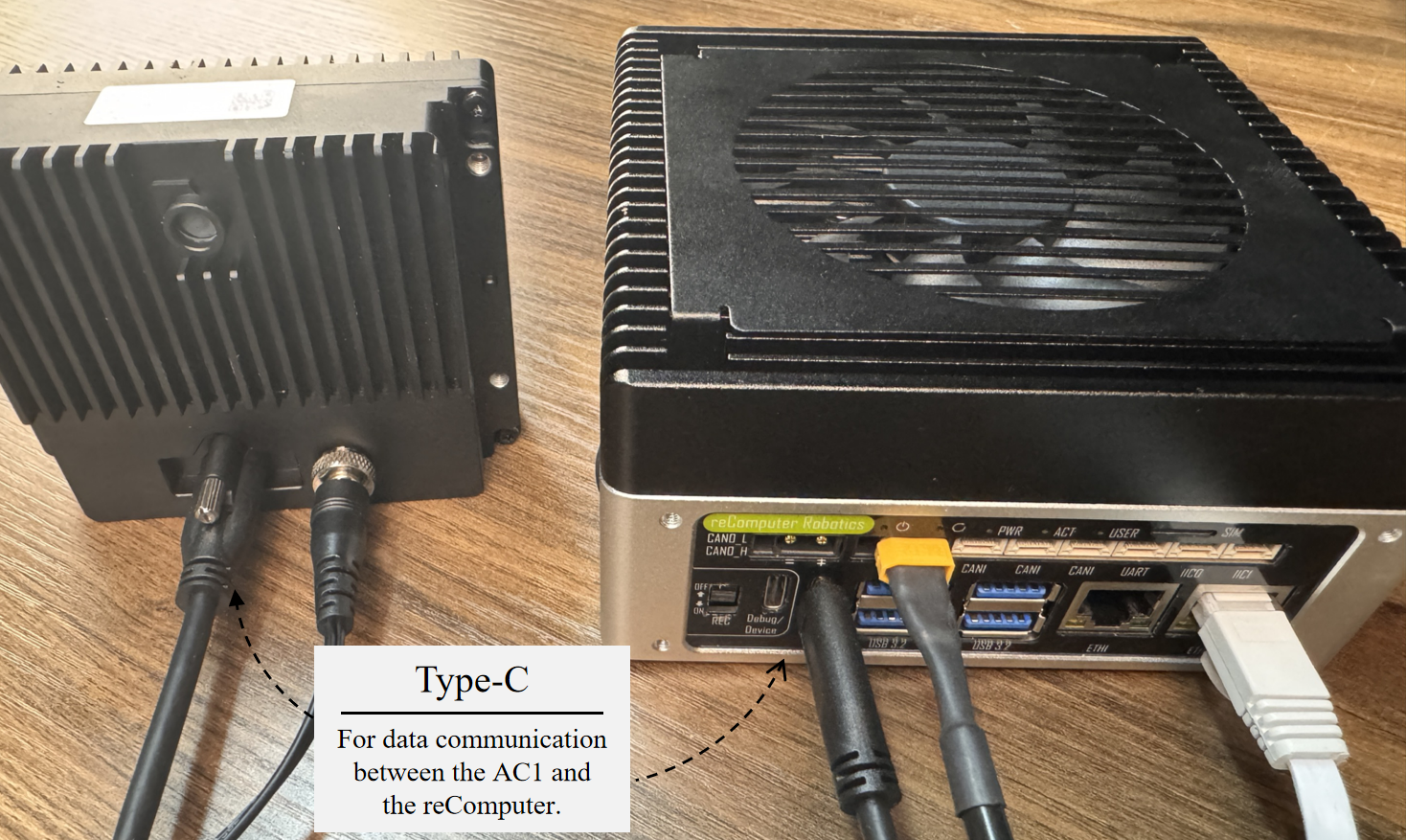
Hardware Connection
Getting Started
Step 1. install ROS on reComputer Robotics J4012
a. Add the following content to ~/.bashrc.
export CUDA_HOME=/usr/local/cuda
export PATH=$CUDA_HOME/bin:$PATH
export LD_LIBRARY_PATH=$CUDA_HOME/lib64:$LD_LIBRARY_PATH
export PATH=/usr/src/tensorrt/bin:$PATH
We can open the file in the terminal by entering the command vim ~/bashrc.
b. Enter the following command in the terminal to install ROS2.
sudo apt install software-properties-common -y
sudo add-apt-repository universe
sudo apt update
sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
sudo apt install ros-humble-desktop -y
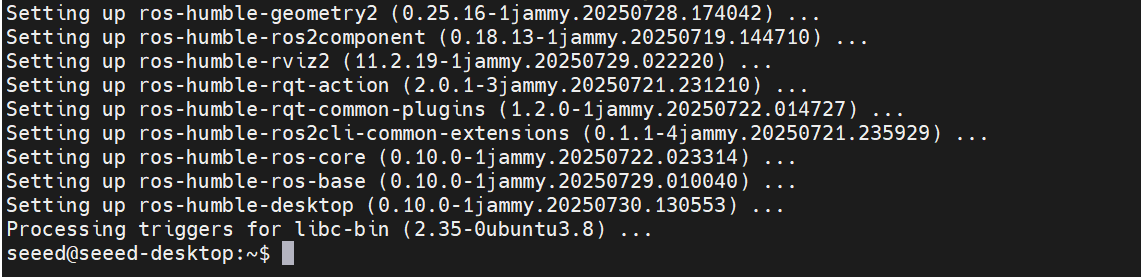
To verify whether ROS2 has been successfully installed, we can create two new terminals in the device and run the following commands respectively.
# terminal1
ros2 run demo_nodes_cpp talker
# terminal2
ros2 run demo_nodes_py listener
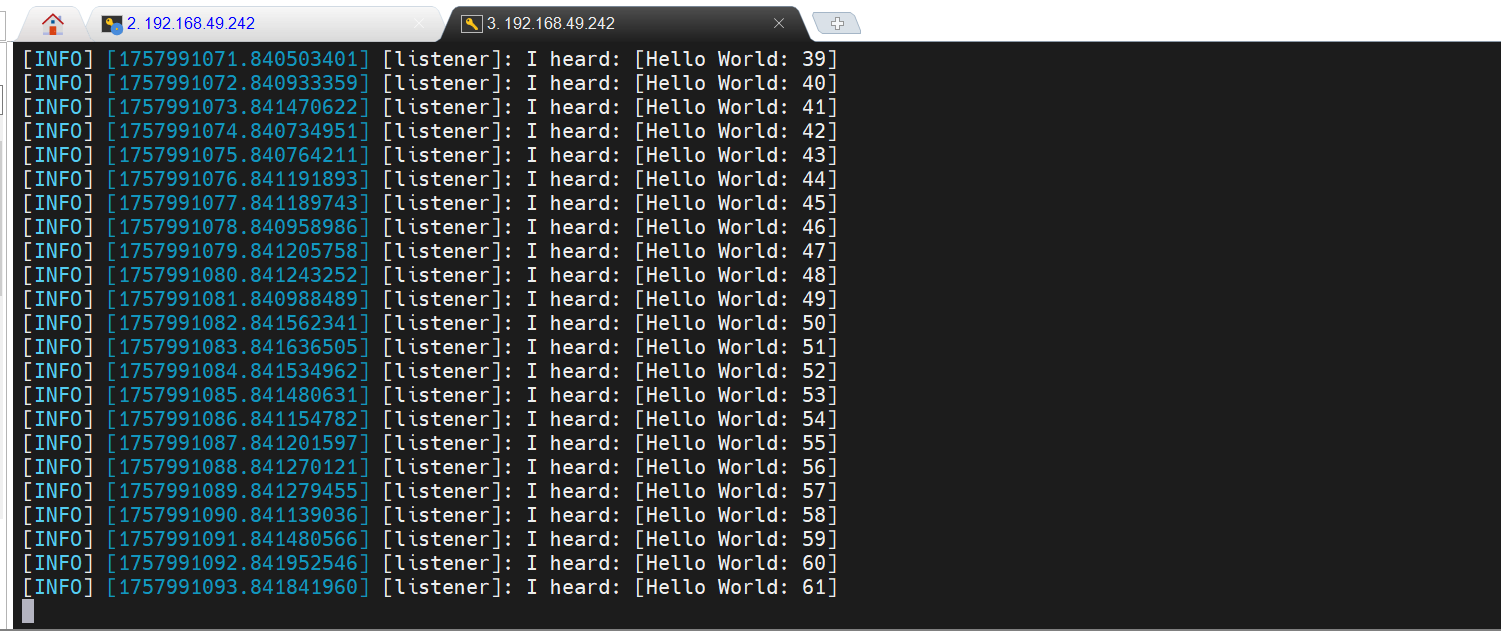
If both terminals print out the messages, it means ROS 2 Humble has been successfully installed! 🎉
Step2. Install ROS SDK for AC1
Enter the following command in the terminal of reComputer.
git clone https://github.com/RoboSense-Robotics/robosense_ac_ros2_sdk_infra.git
sudo apt-get install libavformat-dev libavdevice-dev libavcodec-dev
sudo apt install python3-colcon-common-extensions -y
echo "source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash" >> ~/.bashrc
source ~/.bashrc
cd robosense_ac_ros2_sdk_infra/modules/
colcon build
source install/setup.bash

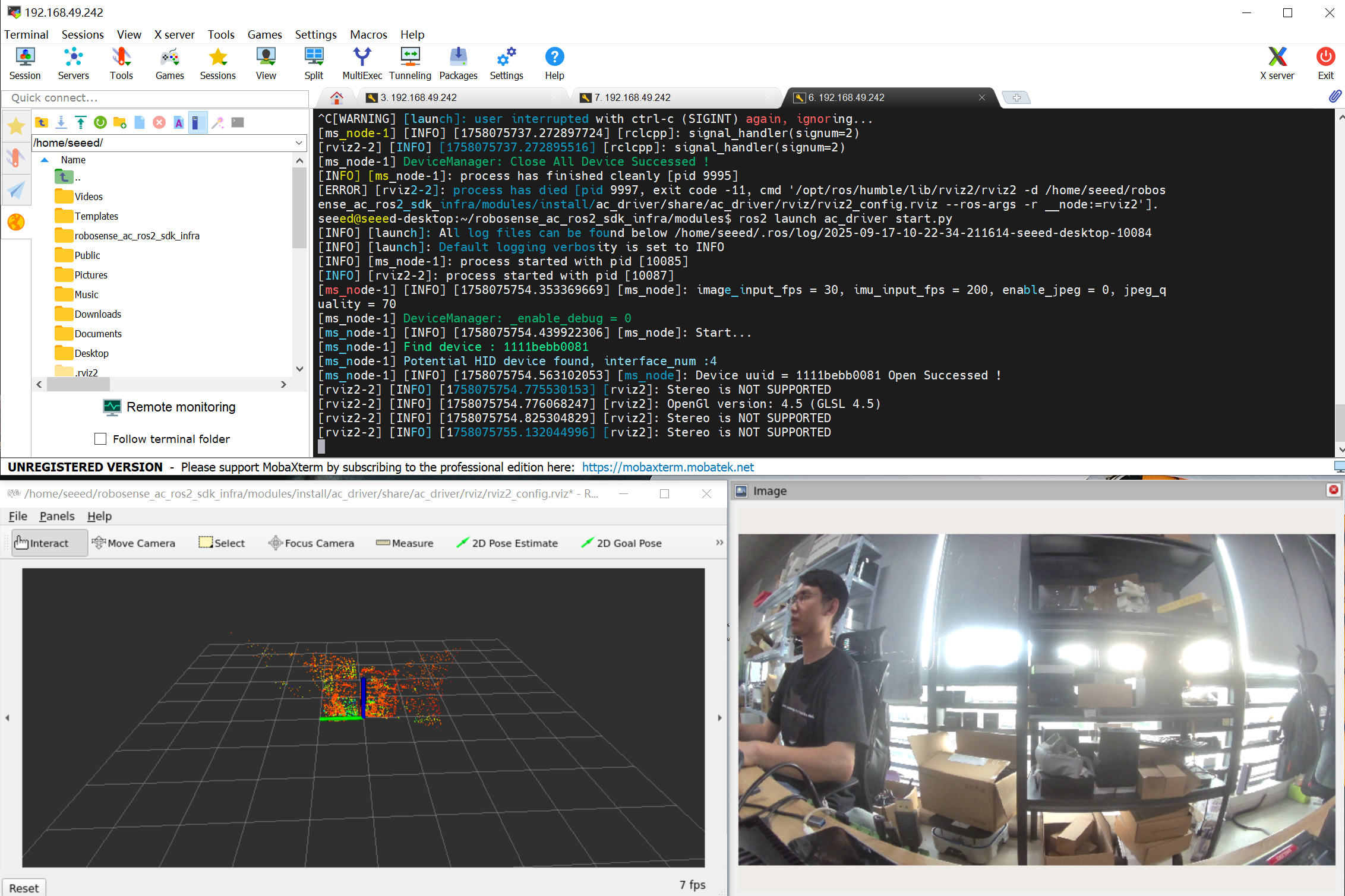
If everything goes well, we can visualize the environment data captured by AC1 using Rviz.
ros2 launch ac_driver start.py
Next Step
Many advanced algorithms can be reproduced using AC1 together with reComputer Jetson. For more details, please refer here.
Resources
- https://robosense-wiki-en.readthedocs.io/en/latest/
- https://github.com/RoboSense-Robotics/robosense_ac_ros2_sdk_infra
- https://www.seeedstudio.com/reComputer-Robotics-J3011-with-GMSL-extension-board-p-6538.html
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.