树莓派双通道 CAN BUS FD 扩展板

这是一款适用于树莓派的 CAN BUS 扩展板(以下简称双通道 pi hat),具有 2 通道 CAN BUS I/O,支持 CAN FD。CAN FD 支持更快的传输速度(高达 8Mbps)
它还具有两个板载 120Ω 终端电阻,由开关控制。

版本说明
树莓派 CAN BUS 扩展板有 3 个版本。所有 3 个版本都能在树莓派平台上完美工作,如果您使用的是 RPi 平台,可以跳过本节。
CAN BUS 扩展板目前仅支持 Jetson Nano 开发者套件(SD 卡版本),不支持带有 eMMC 的 Jetson Nano(reComputer J1010/J1020v2)。不同版本的 CAN BUS 扩展板确实会影响功能,如果您在 Jetson Nano 平台上使用,请仔细查看下表。
| 产品名称 | 芯片 | RPi 状态 | Jetson Nano 状态 |
|---|---|---|---|
| 树莓派双通道 CAN-BUS(FD) 扩展板 (MCP2517FD) | MCP2517FD | 双通道 | 单通道(can0) |
| 树莓派双通道 CAN-BUS(FD) 扩展板 (MCP2518FD) | MCP2518FD | 双通道 | 双通道 |
如您所见,树莓派双通道 CAN-BUS(FD) 扩展板有两个版本的芯片 (MCP2517FD),两个通道都能在 RPi 上工作,但在 Jetson Nano 平台上只有单通道 (CAN0) 工作!
特性
- 高速传输速率:8Mbps@10m 20AWG 屏蔽电缆 / 1Mbps@40m 20AWG 屏蔽电缆
- 稳定的电源供应,可选择树莓派电源或 DC 电源
- 兼容树莓派 2、树莓派 3、树莓派 3、树莓派 4 和树莓派 Zero
- 一键配置 120Ω 终端电阻
- 支持 CAN FD
硬件概述




安装指南

您可以看到我们在组装过程中使用了尼龙柱,以避免 CAN BUS 端口下方的金属端子与树莓派上的 HDMI 接口之间发生短路。因此,请务必按照图示安装尼龙柱。
规格参数
| 参数 | 值 |
|---|---|
| 电源输入 | 12V~24V DC 树莓派 GPIO 5V |
| CAN FD 控制器 | MCP2517FD |
| CAN FD 收发器 | MCP2557FD |
| CAN FD 通道 | 2 |
| 传输速率 | 8Mbps@10m 20AWG 屏蔽电缆 1Mbps@40m 20AWG 屏蔽电缆 |
| 与树莓派的通信接口 | SPI |
| Grove 接口 | Grove I2C x2 |
支持的平台
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
入门指南
所需材料
| 树莓派 | 2通道 CAN-BUS(FD) 扩展板 | Arduino 开发板 | CAN-BUS 扩展板 V2 |
|---|---|---|---|
 |  |  |  |
| 立即购买 | 立即购买 | 立即购买 | 立即购买 |
💡 注意: 树莓派 2 通道 CAN BUS FD 扩展板仅支持内核版本 6.6.42 及以下版本。
我们还需要两根公对公跳线和电源线来为这些开发板供电。
硬件连接
-
步骤 1. 按照安装指南将 2 通道 CAN-BUS(FD) 扩展板插入树莓派。
-
步骤 2. 将 CAN BUS 扩展板 V2 插入 Seeeduino(或 Arduino)开发板
-
步骤 3. 使用跳线连接两个扩展板的 CAN 端子。
| 2 通道 CAN-BUS(FD) 扩展板 | CAN-BUS 扩展板 V2 |
|---|---|
| CAN_0_L | CANL |
| CAN_0_H | CANH |
您可以在扩展板背面找到丝印标识。
- 步骤 4. 为树莓派和 Seeeduino 供电。

软件
安装 CAN-HAT
- 步骤 1. 打开 config.txt 文件
sudo nano /boot/config.txt
- 步骤 2. 在文件末尾添加以下行
dtoverlay=seeed-can-fd-hat-v2
-
步骤 3. 按 Ctrl + x,按 y 然后按 Enter 来保存文件
-
步骤 4. 重启 Raspberry Pi
sudo reboot
- 步骤 5. 检查内核日志以查看 CAN-BUS HAT 是否成功初始化。您还将在 ifconfig 结果列表中看到 can0 和 can1 出现
pi@raspberrypi:~ $ dmesg | grep spi
[ 6.178008] mcp25xxfd spi0.0 can0: MCP2517FD rev0.0 (-RX_INT +MAB_NO_WARN +CRC_REG +CRC_RX +CRC_TX +ECC -HD m:20.00MHz r:18.50MHz e:0.00MHz) 成功初始化。
[ 6.218466] mcp25xxfd spi0.1 (unnamed net_device) (uninitialized): 检测 MCP25xxFD 失败 (osc=0x00000000)。
pi@raspberrypi:~ $ ifconfig -a
can0: flags=128<NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 166
can1: flags=128<NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 167
eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 10.0.0.13 netmask 255.255.255.0 broadcast 10.0.0.255
inet6 fe80::44cc:eeb8:47a0:7fce prefixlen 64 scopeid 0x20<link>
ether b8:27:eb:25:d4:e0 txqueuelen 1000 (Ethernet)
RX packets 299 bytes 27437 (26.7 KiB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 172 bytes 25974 (25.3 KiB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
lo: flags=73<UP,LOOPBACK,RUNNING> mtu 65536
inet 127.0.0.1 netmask 255.0.0.0
inet6 ::1 prefixlen 128 scopeid 0x10<host>
loop txqueuelen 1000 (Local Loopback)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
wlan0: flags=4098<BROADCAST,MULTICAST> mtu 1500
ether b8:27:eb:70:81:b5 txqueuelen 1000 (Ethernet)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
- 步骤 6. 设置 can fd 协议,dbitrate 可以设置为 8M 速度。更多用法请参考内核文档
sudo ip link set can0 up type can bitrate 1000000 dbitrate 8000000 restart-ms 1000 berr-reporting on fd on
sudo ip link set can1 up type can bitrate 1000000 dbitrate 8000000 restart-ms 1000 berr-reporting on fd on
sudo ifconfig can0 txqueuelen 65536
sudo ifconfig can1 txqueuelen 65536
- 步骤 7. 打开两个终端窗口,在 Windows 中输入以下命令来测试 can fd 协议。
#发送数据
cangen can0 -mv
#转储数据
candump can0
您可以通过使用跳线连接两个通道来测试 CAN-BUS:0_L <===> 1_L,0_H <===> 1_H。
与 Arduino CAN BUS Shield 通信
在此演示中,我们只使用两个通道中的一个。
对于 Arduino CAN BUS Shield,我们提供了 Arduino 代码,如果您不知道如何使用 Arduino,请查看这里。
对于 2 通道 pi hat,有两种发送和接收的方式,您可以使用 can-util/cangen 和 python 代码。
CAN BUS Shield 发送和 CAN HAT 接收
CAN BUS Shield 的 Arduino 代码:
// demo: CAN-BUS Shield, send data
// [email protected]
#include <mcp_can.h>
#include <SPI.h>
// the cs pin of the version after v1.1 is default to D9
// v0.9b and v1.0 is default D10
const int SPI_CS_PIN = 9;
MCP_CAN CAN(SPI_CS_PIN); // Set CS pin
void setup()
{
Serial.begin(115200);
while (CAN_OK != CAN.begin(CAN_500KBPS)) // init can bus : baudrate = 500k
{
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
void loop()
{
//send data: id = 0x00, standrad frame, data len = 8, stmp: data buf
stmp[7] = stmp[7]+1;
if(stmp[7] == 100)
{
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if(stmp[6] == 100)
{
stmp[6] = 0;
stmp[5] = stmp[6] + 1;
}
}
CAN.sendMsgBuf(0x00, 0, 8, stmp);
delay(100); // send data per 100ms
}
// END FILE
树莓派设置,您可以使用 can-util 来接收
#设置 500k 波特率
pi@raspberrypi:~ $ sudo ip link set can0 up type can bitrate 500000
pi@raspberrypi:~ $ ip -details link show can0
3: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UNKNOWN mode DEFAULT group default qlen 10
link/can promiscuity 0
can state ERROR-ACTIVE (berr-counter tx 0 rx 0) restart-ms 0
bitrate 500000 sample-point 0.875
tq 25 prop-seg 34 phase-seg1 35 phase-seg2 10 sjw 1
mcp25xxfd: tseg1 2..256 tseg2 1..128 sjw 1..128 brp 1..256 brp-inc 1
mcp25xxfd: dtseg1 1..32 dtseg2 1..16 dsjw 1..16 dbrp 1..256 dbrp-inc 1
clock 40000000numtxqueues 1 numrxqueues 1 gso_max_size 65536 gso_max_segs 65535
#接收
pi@raspberrypi:~ $ candump can0
can0 000 [8] 00 00 00 00 00 00 00 05
can0 000 [8] 00 00 00 00 00 00 00 06
can0 000 [8] 00 00 00 00 00 00 00 07
can0 000 [8] 00 00 00 00 00 00 00 08
can0 000 [8] 00 00 00 00 00 00 00 09
can0 000 [8] 00 00 00 00 00 00 00 0A
can0 000 [8] 00 00 00 00 00 00 00 0B
can0 000 [8] 00 00 00 00 00 00 00 0C
can0 000 [8] 00 00 00 00 00 00 00 0D
can0 000 [8] 00 00 00 00 00 00 00 0E
can0 000 [8] 00 00 00 00 00 00 00 0F
can0 000 [8] 00 00 00 00 00 00 00 10
can0 000 [8] 00 00 00 00 00 00 00 11
can0 000 [8] 00 00 00 00 00 00 00 12
can0 000 [8] 00 00 00 00 00 00 00 13
can0 000 [8] 00 00 00 00 00 00 00 14
can0 000 [8] 00 00 00 00 00 00 00 15
can0 000 [8] 00 00 00 00 00 00 00 16
can0 000 [8] 00 00 00 00 00 00 00 17
can0 000 [8] 00 00 00 00 00 00 00 18
can0 000 [8] 00 00 00 00 00 00 00 19
can0 000 [8] 00 00 00 00 00 00 00 1A
can0 000 [8] 00 00 00 00 00 00 00 1B
can0 000 [8] 00 00 00 00 00 00 00 1C
can0 000 [8] 00 00 00 00 00 00 00 1D
或者您可以使用 python 代码 来获取 CAN 数据。要使用 python 接收 CAN 数据,您应该首先安装 python-can。
# install python-can
sudo pip3 install python-can
打开一个新的 python 文件并复制以下代码,保存为 can_test.py:
import can
can_interface = 'can0'
bus = can.interface.Bus(can_interface, bustype='socketcan_native')
while True:
message = bus.recv(1.0) # Timeout in seconds.
if message is None:
print('Timeout occurred, no message.')
print(message)
运行 Python 代码,结果如下:
pi@raspberrypi:~ $ python3 can_test.py
Timestamp: 1550471771.628215 ID: 0000 S DLC: 8 00 00 00 00 00 00 0e 63 Channel: can0
Timestamp: 1550471772.629302 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 00 Channel: can0
Timestamp: 1550471773.630658 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 01 Channel: can0
Timestamp: 1550471774.632018 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 02 Channel: can0
Timestamp: 1550471775.633395 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 03 Channel: can0
Timestamp: 1550471776.634774 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 04 Channel: can0
Timestamp: 1550471777.636135 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 05 Channel: can0
Timestamp: 1550471778.637481 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 06 Channel: can0
Timestamp: 1550471779.638859 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 07 Channel: can0
Timestamp: 1550471780.640222 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 08 Channel: can0
Timestamp: 1550471781.641602 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 09 Channel: can0
Timestamp: 1550471782.642970 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 0a Channel: can0
CAN BUS Shield 接收和 CAN HAT 发送
对于树莓派,您可以使用 cangen 发送随机数据包:
pi@raspberrypi:~ $ cangen can0 -v
can0 442#14.C4.1A.1A.C2.25.79.25
can0 748#4E.C7.8B.0B.6E.B9.15.77
can0 1E4#64.D4.62.22.2F.A6.BF
can0 1DD#69.6F.61.33.1F.59.E4.7C
can0 63D#
can0 764#2C.C1.E3
can0 68B#11.9C.63.6D.EA.E9.4B
can0 329#DA.06.2C.34.6C
can0 7DD#2E.F5.E0.2A.26.77.58.38
can0 1BE#94.30.6E.2F.A2.7B.E3.1D
can0 654#D1.21.A3.58.31.E8.51.5F
can0 706#51.41.36.5C.43.8D.AE.5D
can0 34A#89.F2.DE.33.AE.52.38.6C
can0 6AC#C1.35.83.41.37
can0 38C#22.AF
can0 208#22.8E.97.58.E5.69.F7.2C
对于 Arduino,您可以使用以下代码来接收 CAN 数据。
// demo: CAN-BUS Shield, receive data with interrupt mode
// when in interrupt mode, the data coming can't be too fast, must >20ms, or else you can use check mode
// loovee, 2014-6-13
#include <SPI.h>
#include "mcp_can.h"
// the cs pin of the version after v1.1 is default to D9
// v0.9b and v1.0 is default D10
const int SPI_CS_PIN = 9;
MCP_CAN CAN(SPI_CS_PIN); // Set CS pin
unsigned char flagRecv = 0;
unsigned char len = 0;
unsigned char buf[8];
char str[20];
void setup()
{
Serial.begin(115200);
while (CAN_OK != CAN.begin(CAN_500KBPS)) // init can bus : baudrate = 500k
{
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
attachInterrupt(0, MCP2515_ISR, FALLING); // start interrupt
}
void MCP2515_ISR()
{
flagRecv = 1;
}
void loop()
{
if(flagRecv)
{ // check if get data
flagRecv = 0; // clear flag
// iterate over all pending messages
// If either the bus is saturated or the MCU is busy,
// both RX buffers may be in use and reading a single
// message does not clear the IRQ conditon.
while (CAN_MSGAVAIL == CAN.checkReceive())
{
// read data, len: data length, buf: data buf
CAN.readMsgBuf(&len, buf);
// print the data
for(int i = 0; i<len; i++)
{
Serial.print(buf[i]);Serial.print("\t");
}
Serial.println();
}
}
}
通过点击 工具-> 串口监视器 打开 Arduino IDE 的 串口监视器。或者同时按下 ctrl+shift+m 键。将波特率设置为 115200。结果应该如下所示:

或者您可以使用 python-can 来发送数据:
Python 代码如下:
import time
import can
bustype = 'socketcan_native'
channel = 'can0'
def producer(id):
""":param id: Spam the bus with messages including the data id."""
bus = can.interface.Bus(channel=channel, bustype=bustype)
for i in range(10):
msg = can.Message(arbitration_id=0xc0ffee, data=[id, i, 0, 1, 3, 1, 4, 1], extended_id=False)
bus.send(msg)
# Issue #3: Need to keep running to ensure the writing threads stay alive. ?
time.sleep(1)
producer(10)
卸载 CAN-HAT
如果您想卸载此 CAN-HAT,只需运行以下代码:
pi@raspberrypi:~/seeed-linux-dtoverlays/modules/CAN-HAT $ sudo ./uninstall.sh
...
------------------------------------------------------
Please reboot your raspberry pi to apply all settings
Thank you!
------------------------------------------------------
在 Jetson Nano 上使用 CAN-BUS 扩展板
现在 CAN-BUS 扩展板也支持 Jetson Nano 平台,但基于不同的硬件版本存在一些限制。如果您使用的是 Jetson Nano 平台,请参考版本声明!
- 克隆仓库:
git clone https://github.com/Seeed-Studio/seeed-linux-dtoverlays
- 构建 dtbo 和驱动程序:
cd seeed-linux-dtoverlays
export CUSTOM_MOD_LIST="CAN-HAT"; make all_jetsonnano
- 安装驱动程序:
sudo -E make install_jetsonnano
- 安装 dtbo:
sudo cp overlays/jetsonnano/2xMCP2518FD-spi0.dtbo /boot
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n "Seeed 2xMCP2518FD"
sudo reboot
现在您也可以运行 dmesg | grep spi 和 ifconfig -a 来检查 CAN-BUS 是否正确初始化。根据您的硬件,您应该能够看到 can0 或者 can0 和 can1。
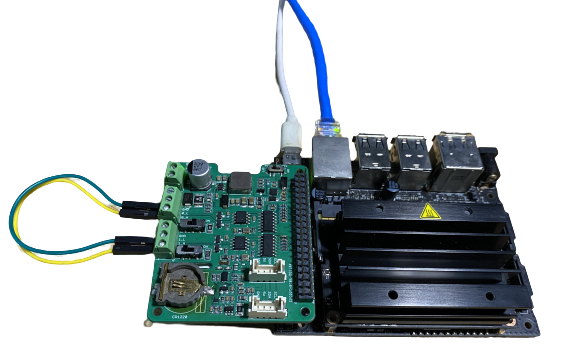
这里使用的硬件是最新的支持 Jetson Nano 平台双通道的 2-Channel CAN FD Master Hat for RPi,如果您使用的是旧版本,那么您将只有单通道 can0。
qqq@jetson-qqq:~$ dmesg | grep spi
[ 10.867712] mcp25xxfd spi0.0 can0: MCP2518FD rev0.0 (-RX_INT -MAB_NO_WARN +CRC_REG +CRC_RX +CRC_TX +ECC -HD m:20.00MHz r:18.50MHz e:0.00MHz) successfully initialized.
[ 10.879487] mcp25xxfd spi0.1 can1: MCP2518FD rev0.0 (-RX_INT -MAB_NO_WARN +CRC_REG +CRC_RX +CRC_TX +ECC -HD m:20.00MHz r:18.50MHz e:0.00MHz) successfully initialized.
qqq@jetson-qqq:~$ ifconfig -a
can0: flags=128<NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 112
can1: flags=128<NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 114
测试
注意: 这里使用 2-Channel CAN FD Master Hat for RPi 作为硬件。
您也可以按如下方式连接通道进行测试:
0_L <===> 1_L
0_H <===> 1_H
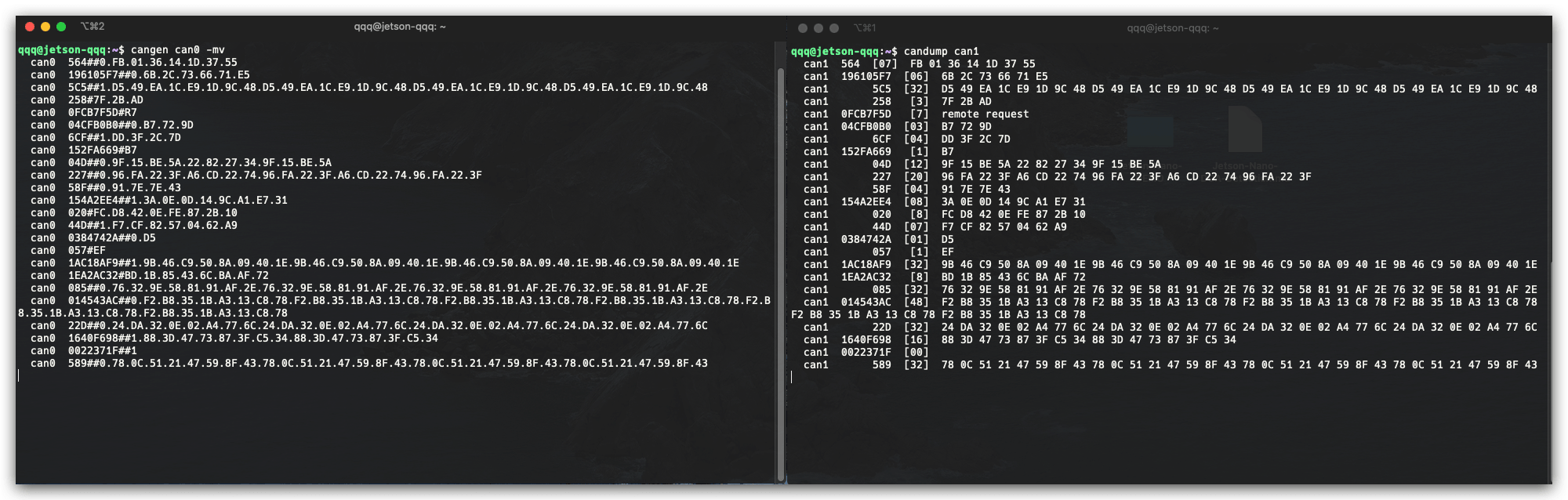
打开两个终端窗口,在窗口中输入以下命令来测试 can fd 协议。
#发送数据
cangen can0 -mv
#转储数据
candump can1
内置 RTC 使用方法
最新的树莓派 2 通道 CAN FD 主控板还配备了板载 RTC。按照以下步骤在树莓派上安装 RTC 驱动程序:
- 更新树莓派并重启:
sudo apt update
sudo apt upgrade
sudo reboot
- 安装依赖项
sudo apt install i2c-tools build-essential raspberrypi-kernel-headers
- 下载驱动程序:
curl -O -L https://github.com/dresden-elektronik/raspbee2-rtc/archive/master.zip
unzip master.zip
- 编译 RTC 内核模块
cd raspbee2-rtc-master
make
- 安装 RTC 内核模块
sudo make install
sudo reboot
- 将系统时间配置到 RTC 模块
sudo hwclock --systohc
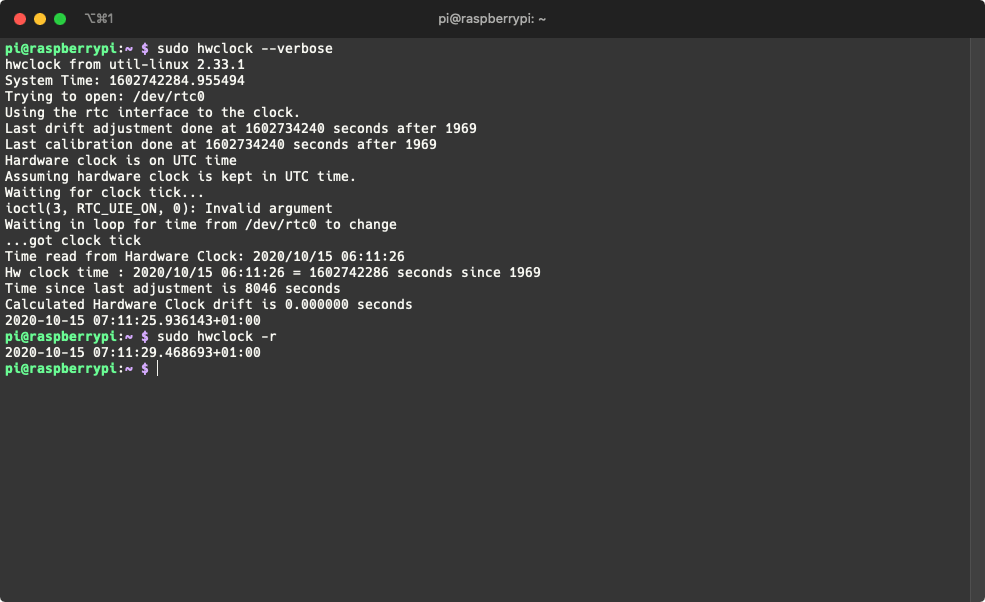
- 测试 RTC 是否正常工作
sudo hwclock --verbose
现在您可以使用以下命令读取 RTC 时间:
sudo hwclock -r
与 Wio Terminal 配合使用

除了将 CAN-BUS Pi Hat 与单板计算机配合使用外,现在您还可以将其与 Wio Terminal(Arduino 兼容开发板)配合使用!在 MCU 上开发 CAN 相关项目!
请查看以下 wiki 了解更多关于 Wio Terminal 的信息:
所需硬件
为了测试目的,您可能还需要准备一些其他的 CAN-BUS 开发组件,在本示例中我们使用以下设备:
- CAN-BUS 扩展板 V2 采用 MCP2515 和 MCP2551 + Arduino 开发板
安装 Seeed_Arduino_CAN Arduino 库
请确保您已安装 Seeed SAMD 开发板库并更新到最新版本!
-
访问 Seeed_Arduino_CAN 仓库并将整个仓库下载到您的本地驱动器。
-
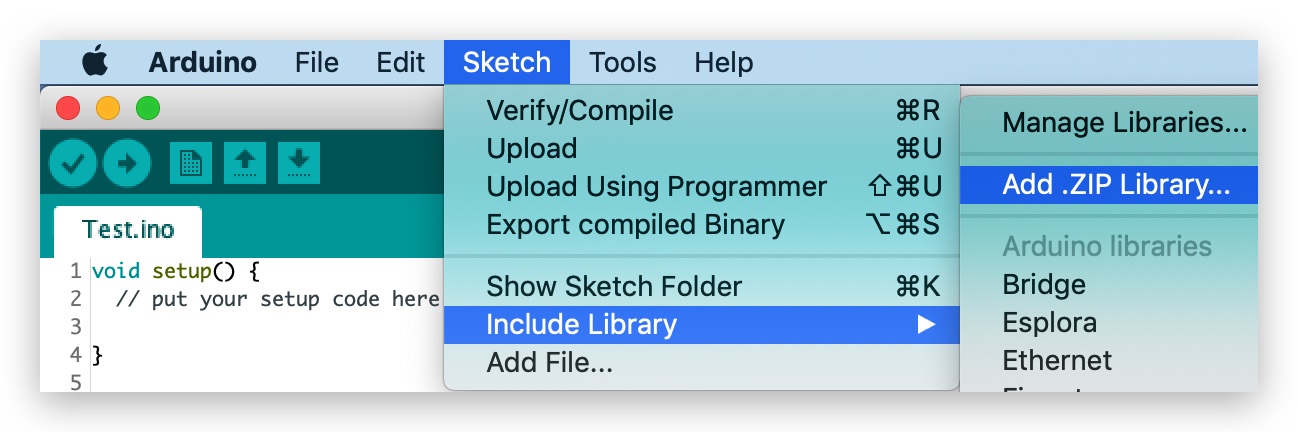
现在,可以将 Seeed_Arduino_CAN 库安装到 Arduino IDE 中。打开 Arduino IDE,点击
sketch->Include Library->Add .ZIP Library,然后选择您刚刚下载的Seeed_Arduino_CAN文件。
发送示例代码
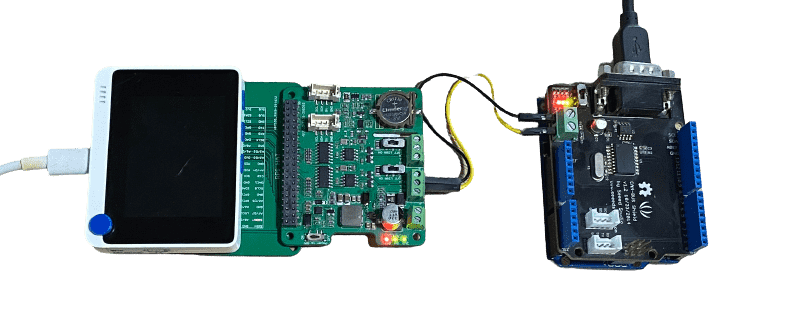
这是一个使用 树莓派 2 通道 CAN-BUS(FD) 扩展板 (MCP2518FD) 与 Wio Terminal 向另一个 CAN-BUS 设备发送 CAN-BUS 数据 的示例(在本例中,是 CAN-BUS 扩展板 V2 采用 MCP2515 和 MCP2551 + Arduino Uno)
硬件连接
-
连接 树莓派 2 通道 CAN-BUS(FD) 扩展板 (MCP2518FD) 的
Channel 0 L-> CAN-BUS 扩展板 V2 的CANL -
连接 树莓派 2 通道 CAN-BUS(FD) 扩展板 (MCP2518FD) 的
Channel 0 H-> CAN-BUS 扩展板 V2 的CANH -
使用 Wio Terminal 40 引脚树莓派 Hat 适配板 将树莓派 2 通道 CAN-BUS(FD) 扩展板与 Wio Terminal 连接。
- Arduino Uno + CAN-BUS 扩展板 V2 的代码
#include <SPI.h>
#include "mcp2515_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
const int SPI_CS_PIN = 9;
mcp2515_can CAN(SPI_CS_PIN);
unsigned char len = 0;
unsigned char buf[8];
void setup() {
SERIAL.begin(115200);
while (!SERIAL) {
; // wait for serial port to connect. Needed for native USB port only
}
while (CAN_OK != CAN.begin(CAN_500KBPS)) { // init can bus : baudrate = 500k
// init can bus : baudrate = 500k
SERIAL.println("CAN BUS Shield init fail");
SERIAL.println(" Init CAN BUS Shield again");
delay(100);
}
SERIAL.println("CAN BUS Shield init ok!");
}
void loop() {
// iterate over all pending messages
// If either the bus is saturated or the MCU is busy,
// both RX buffers may be in use and reading a single
// message does not clear the IRQ conditon.
while (CAN_MSGAVAIL == CAN.checkReceive()) {
// read data, len: data length, buf: data buf
SERIAL.println("checkReceive");
CAN.readMsgBuf(&len, buf);
// print the data
for (int i = 0; i < len; i++) {
SERIAL.print(buf[i]); SERIAL.print("\t");
}
SERIAL.println();
}
}
- Wio Terminal + 2通道CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD)的代码
#include <SPI.h>
#include "mcp2518fd_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
// 根据您的硬件设置SPI CS引脚
// 对于Wio Terminal配合MCP2518FD RPi Hat:
// 通道0 SPI_CS引脚:BCM 8
// 通道1 SPI_CS引脚:BCM 7
// 中断引脚:BCM25
// *****************************************
// 对于Arduino MCP2515 Hat:
// SPI_CS引脚:D9
const int SPI_CS_PIN = BCM8;
mcp2518fd CAN(SPI_CS_PIN); // 设置CS引脚
void setup() {
SERIAL.begin(115200);
while(!Serial){};
while (0 != CAN.begin((byte)CAN_500K_1M)) { // 初始化CAN总线:波特率 = 500k
SERIAL.println("CAN BUS Shield init fail");
SERIAL.println(" Init CAN BUS Shield again");
delay(100);
}
SERIAL.println("CAN BUS Shield init ok!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
void loop() {
// 发送数据:id = 0x00,标准帧,数据长度 = 8,stmp:数据缓冲区
stmp[7] = stmp[7] + 1;
if (stmp[7] == 100) {
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if (stmp[6] == 100) {
stmp[6] = 0;
stmp[5] = stmp[6] + 1;
}
}
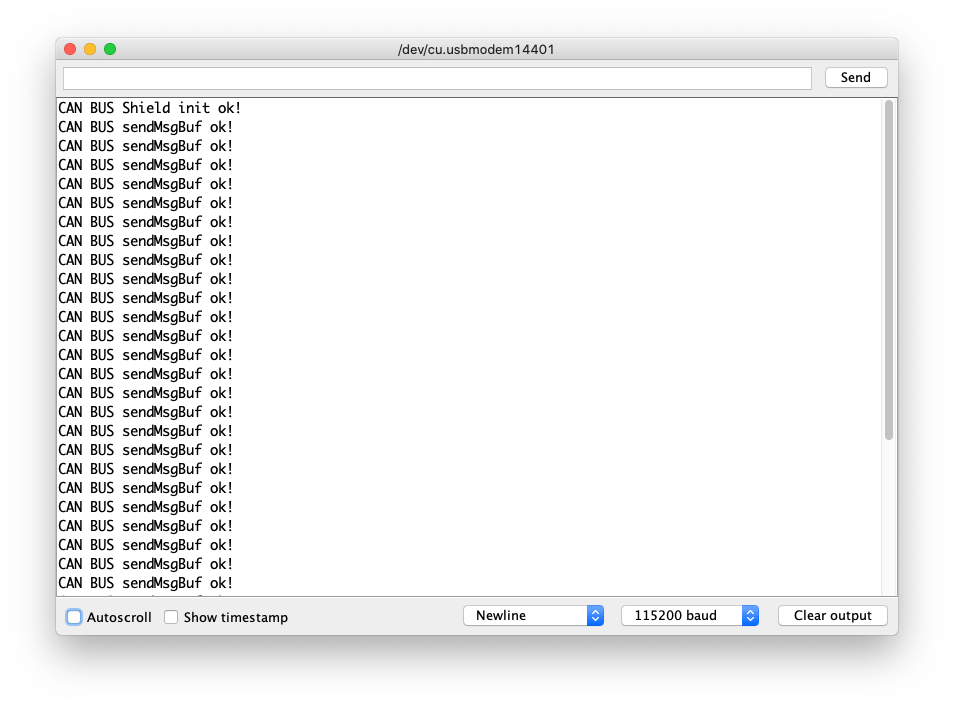
CAN.sendMsgBuf(0x00, 0, 8, stmp);
delay(100); // 每100ms发送数据
SERIAL.println("CAN BUS sendMsgBuf ok!");
}
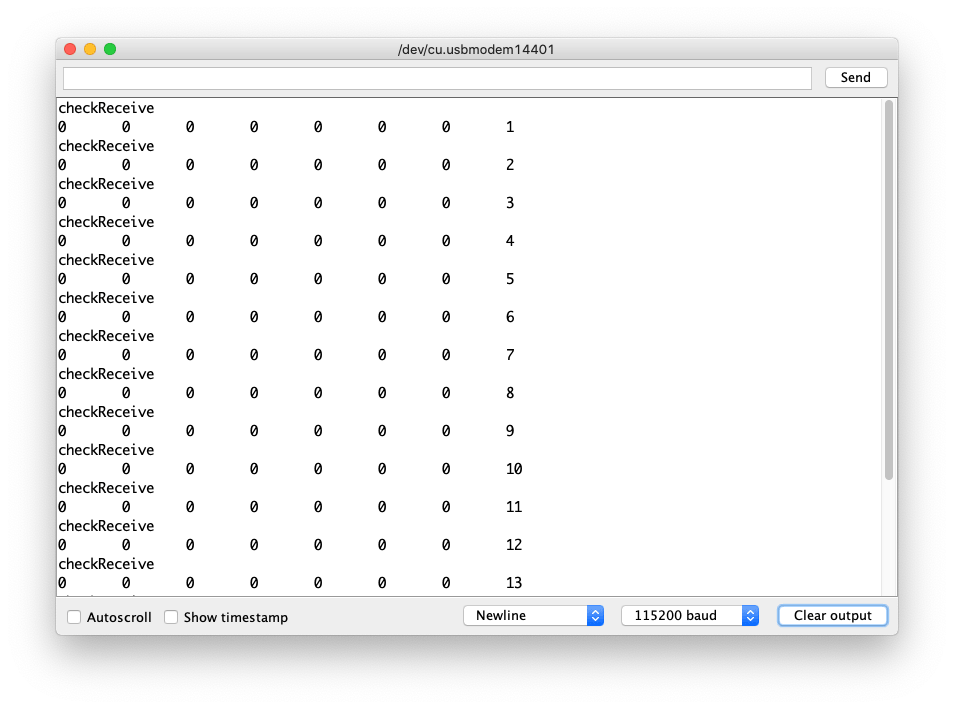
接收示例代码
这是一个使用2通道CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD)与Wio Terminal从另一个CAN-BUS设备接收CAN-BUS数据的示例(在这种情况下,是采用MCP2515和MCP2551的CAN-BUS Shield V2 + Arduino Uno)
硬件连接
与上述发送示例相同的连接。
- Arduino Uno + CAN-BUS Shield V2的代码
#include <SPI.h>
#include "mcp2515_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
const int SPI_CS_PIN = 9;
mcp2515_can CAN(SPI_CS_PIN); // 设置CS引脚
void setup() {
SERIAL.begin(115200);
while(!Serial){};
while (CAN_OK != CAN.begin(CAN_500KBPS)) { // 初始化CAN总线:波特率 = 500k
SERIAL.println("CAN BUS Shield init fail");
SERIAL.println(" Init CAN BUS Shield again");
delay(100);
}
SERIAL.println("CAN BUS Shield init ok!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
void loop() {
// 发送数据:id = 0x00,标准帧,数据长度 = 8,stmp:数据缓冲区
stmp[7] = stmp[7] + 1;
if (stmp[7] == 100) {
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if (stmp[6] == 100) {
stmp[6] = 0;
stmp[5] = stmp[6] + 1;
}
}
CAN.sendMsgBuf(0x00, 0, 8, stmp);
delay(100); // 每100ms发送数据
SERIAL.println("CAN BUS sendMsgBuf ok!");
}
- Wio Terminal + 树莓派用2通道CAN-BUS(FD)扩展板(MCP2518FD)代码
#include <SPI.h>
#include "mcp2518fd_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
// 根据您的硬件设置 SPI CS 引脚
// 对于 Wio Terminal 配合 MCP2518FD RPi Hat:
// 通道 0 SPI_CS 引脚:BCM 8
// 通道 1 SPI_CS 引脚:BCM 7
// 中断引脚:BCM25
// *****************************************
// 对于 Arduino MCP2515 Hat:
// SPI_CS 引脚:D9
const int SPI_CS_PIN = BCM8;
mcp2518fd CAN(SPI_CS_PIN);
unsigned char len = 0;
unsigned char buf[8];
void setup() {
SERIAL.begin(115200);
while (!SERIAL) {
; // 等待串口连接。仅对原生 USB 端口需要
}
while (0 != CAN.begin((byte)CAN_500K_1M)) { // 初始化 CAN 总线:波特率 = 500k
SERIAL.println("CAN BUS Shield init fail");
SERIAL.println(" Init CAN BUS Shield again");
delay(100);
}
SERIAL.println("CAN BUS Shield init ok!");
}
void loop() {
// 遍历所有待处理的消息
// 如果总线饱和或 MCU 忙碌,
// 两个 RX 缓冲区可能都在使用中,读取单个
// 消息不会清除 IRQ 条件。
while (CAN_MSGAVAIL == CAN.checkReceive()) {
// 读取数据,len:数据长度,buf:数据缓冲区
SERIAL.println("checkReceive");
CAN.readMsgBuf(&len, buf);
// 打印数据
for (int i = 0; i < len; i++) {
SERIAL.print(buf[i]); SERIAL.print("\t");
}
SERIAL.println();
}
}
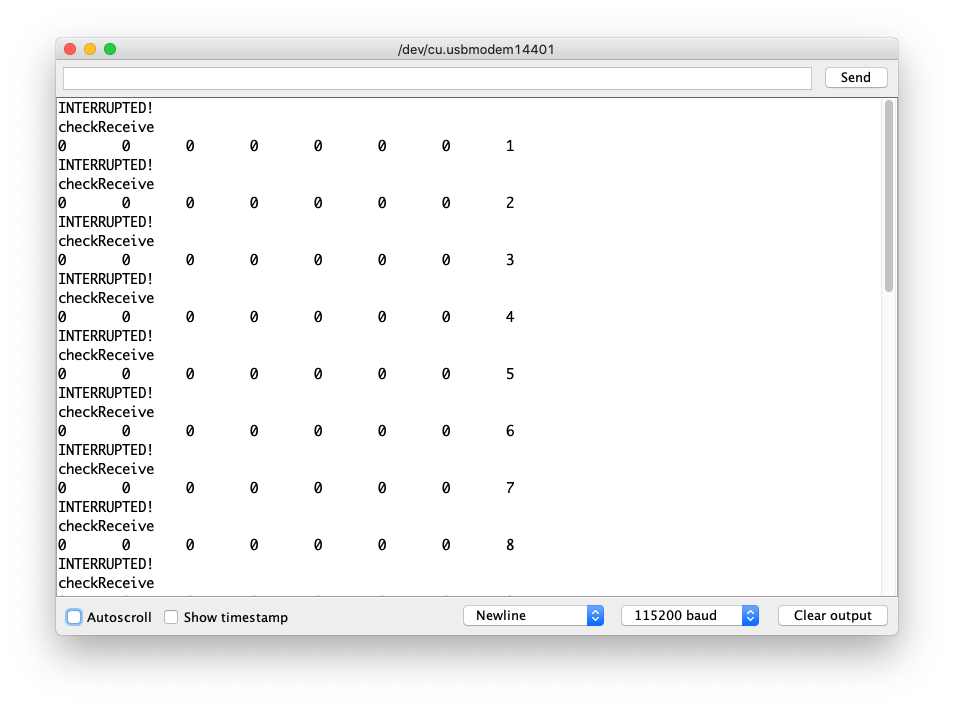
使用中断接收示例代码
这是一个使用树莓派 2 通道 CAN-BUS(FD) 扩展板 (MCP2518FD) 与 Wio Terminal 从另一个 CAN-BUS 设备接收 CAN-BUS 数据的示例(在这种情况下,是采用 MCP2515 和 MCP2551 + Arduino Uno 的 CAN-BUS Shield V2)。为了使其更可靠,这里使用中断来触发传入的数据流。
硬件连接
- Arduino Uno + CAN-BUS Shield V2 的代码
#include <SPI.h>
#include "mcp2515_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
const int SPI_CS_PIN = 9;
mcp2515_can CAN(SPI_CS_PIN); // 设置 CS 引脚
void setup() {
SERIAL.begin(115200);
while(!Serial){};
while (CAN_OK != CAN.begin(CAN_500KBPS)) { // 初始化 can 总线:波特率 = 500k
SERIAL.println("CAN BUS Shield init fail");
SERIAL.println(" Init CAN BUS Shield again");
delay(100);
}
SERIAL.println("CAN BUS Shield init ok!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
void loop() {
// 发送数据:id = 0x00,标准帧,数据长度 = 8,stmp:数据缓冲区
stmp[7] = stmp[7] + 1;
if (stmp[7] == 100) {
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if (stmp[6] == 100) {
stmp[6] = 0;
stmp[5] = stmp[6] + 1;
}
}
CAN.sendMsgBuf(0x00, 0, 8, stmp);
delay(100); // 每 100ms 发送数据
SERIAL.println("CAN BUS sendMsgBuf ok!");
}
Wio Terminal + 2-Channel CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD) 的代码
#include <SPI.h>
#include "mcp2518fd_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
// 根据您的硬件设置 SPI CS 引脚
// 对于 Wio Terminal 配合 MCP2518FD RPi Hat:
// 通道 0 SPI_CS 引脚:BCM 8
// 通道 1 SPI_CS 引脚:BCM 7
// 中断引脚:BCM25
// *****************************************
// 对于 Arduino MCP2515 Hat:
// SPI_CS 引脚:D9
const int SPI_CS_PIN = BCM8;
const int CAN_INT_PIN = BCM25;
mcp2518fd CAN(SPI_CS_PIN);
unsigned char flagRecv = 0;
unsigned char len = 0;
unsigned char buf[8];
void MCP2515_ISR() {
Serial.println("INTERUPTED!");
flagRecv = 1;
}
void setup() {
SERIAL.begin(115200);
while (!SERIAL) {
; // 等待串口连接。仅对原生 USB 端口需要
}
pinMode(CAN_INT_PIN, INPUT);
attachInterrupt(digitalPinToInterrupt(CAN_INT_PIN), MCP2515_ISR, FALLING); // 启动中断
while (0 != CAN.begin((byte)CAN_500K_1M)) { // 初始化 CAN 总线:波特率 = 500k
SERIAL.println("CAN BUS Shield init fail");
SERIAL.println(" Init CAN BUS Shield again");
delay(100);
}
SERIAL.println("CAN BUS Shield init ok!");
}
void loop() {
if (flagRecv) // 触发中断
{
flagRecv = 0;
// 遍历所有待处理的消息
// 如果总线饱和或 MCU 忙碌,
// 两个 RX 缓冲区可能都在使用中,读取单个
// 消息不会清除 IRQ 条件。
while (CAN_MSGAVAIL == CAN.checkReceive()) {
// 读取数据,len:数据长度,buf:数据缓冲区
SERIAL.println("checkReceive");
CAN.readMsgBuf(&len, buf);
// 打印数据
for (int i = 0; i < len; i++) {
SERIAL.print(buf[i]); SERIAL.print("\t");
}
SERIAL.println();
}
}
}
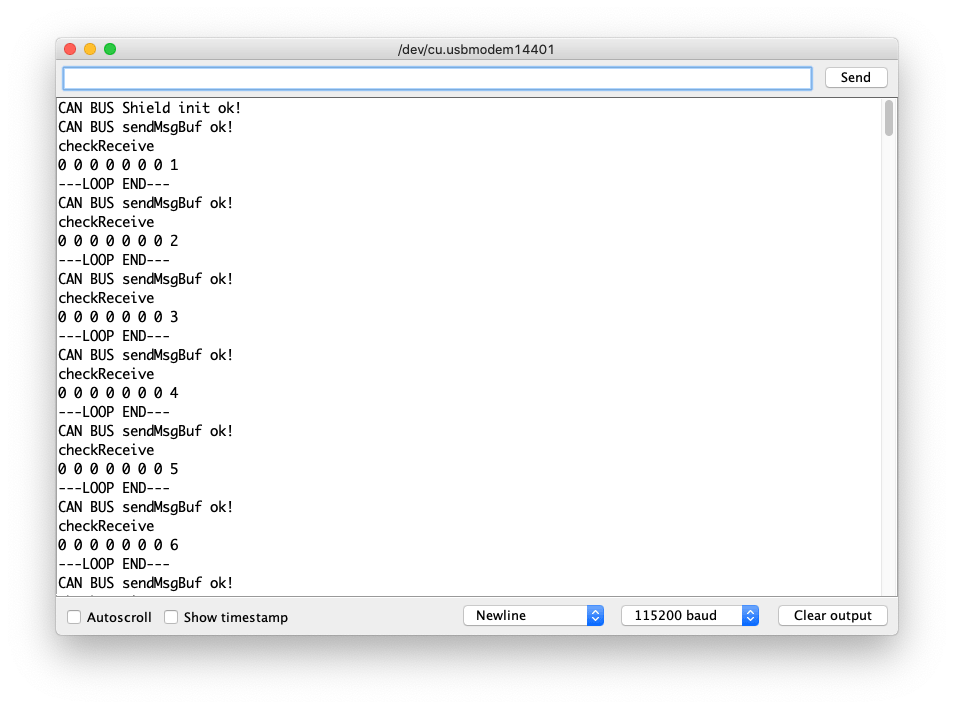
自发自收示例代码
这是一个使用树莓派2通道CAN-BUS(FD)扩展板(MCP2518FD)自发自收CAN-BUS数据的示例。
硬件连接
-
连接**树莓派2通道CAN-BUS(FD)扩展板(MCP2518FD)**的
Channel 0 L-> **树莓派2通道CAN-BUS(FD)扩展板(MCP2518FD)**的Channel 1 L -
连接**树莓派2通道CAN-BUS(FD)扩展板(MCP2518FD)**的
Channel 0 H-> **树莓派2通道CAN-BUS(FD)扩展板(MCP2518FD)**的Channel 1 H

#include <SPI.h>
#include "mcp2518fd_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
// 根据您的硬件设置SPI CS引脚
// 对于Wio Terminal配合MCP2518FD RPi Hat:
// Channel 0 SPI_CS引脚:BCM 8
// Channel 1 SPI_CS引脚:BCM 7
// 中断引脚:BCM25
// *****************************************
// 对于Arduino MCP2515 Hat:
// SPI_CS引脚:D9
const int SPI_CS_PIN_SEND = BCM8;
const int SPI_CS_PIN_RECEIVE = BCM7;
mcp2518fd CAN_SEND(SPI_CS_PIN_SEND);
mcp2518fd CAN_RECEIVE(SPI_CS_PIN_RECEIVE);
unsigned char len = 0;
unsigned char buf[8];
void setup() {
SERIAL.begin(115200);
while(!Serial); // 等待串口
if (CAN_SEND.begin((byte)CAN_500K_1M) != 0 || CAN_RECEIVE.begin((byte)CAN_500K_1M) != 0) {
Serial.println("CAN-BUS初始化错误!");
while(1);
}
SERIAL.println("CAN BUS扩展板初始化成功!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
void loop() {
// 发送数据:id = 0x00,标准帧,数据长度 = 8,stmp:数据缓冲区
stmp[7] = stmp[7] + 1;
if (stmp[7] == 100) {
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if (stmp[6] == 100) {
stmp[6] = 0;
stmp[5] = stmp[6] + 1;
}
}
CAN_SEND.sendMsgBuf(0x00, 0, 8, stmp);
delay(100); // 每100ms发送数据
SERIAL.println("CAN BUS sendMsgBuf成功!");
// ---------------------
if (CAN_MSGAVAIL == CAN_RECEIVE.checkReceive()) {
// 读取数据,len:数据长度,buf:数据缓冲区
SERIAL.println("checkReceive");
CAN_RECEIVE.readMsgBuf(&len, buf);
// 打印数据
for (int i = 0; i < len; i++) {
SERIAL.print(buf[i]); SERIAL.print(" ");
}
SERIAL.println();
}
SERIAL.println("---循环结束---");
}
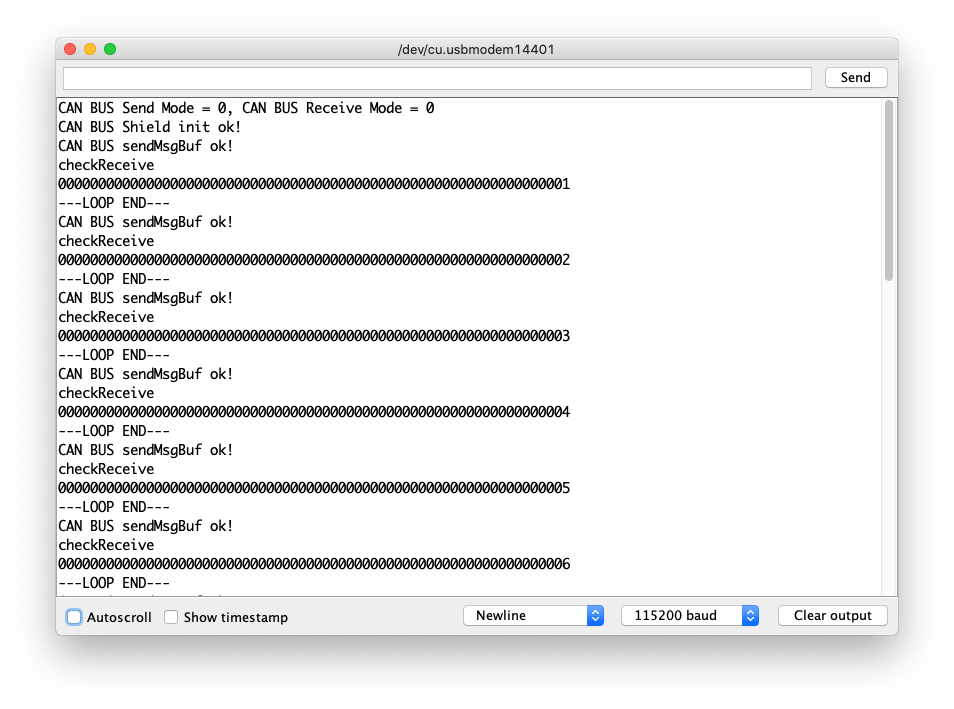
发送 FD 示例代码
这是一个使用 2 通道 CAN-BUS(FD) Raspberry Pi 扩展板 (MCP2518FD) 独立发送和接收 CAN-BUS 数据(最多 64 位)并使用 FD 协议的示例。
硬件连接
与自发自收示例相同的连接。
#include <SPI.h>
#include "mcp2518fd_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
// 根据您的硬件设置 SPI CS 引脚
// 对于 Wio Terminal w/ MCP2518FD RPi Hat:
// 通道 0 SPI_CS 引脚:BCM 8
// 通道 1 SPI_CS 引脚:BCM 7
// 中断引脚:BCM25
// *****************************************
// 对于 Arduino MCP2515 Hat:
// SPI_CS 引脚:D9
const int SPI_CS_PIN_SEND = BCM8;
const int SPI_CS_PIN_RECEIVE = BCM7;
mcp2518fd CAN_SEND(SPI_CS_PIN_SEND);
mcp2518fd CAN_RECEIVE(SPI_CS_PIN_RECEIVE);
void setup() {
SERIAL.begin(115200);
while(!Serial); // 等待串口
CAN_SEND.setMode(0);
CAN_RECEIVE.setMode(0);
if (CAN_SEND.begin((byte)CAN_500K_1M) != 0 || CAN_RECEIVE.begin((byte)CAN_500K_1M) != 0) {
Serial.println("CAN-BUS 初始化错误!");
while(1);
}
byte send_mode = CAN_SEND.getMode();
byte receive_mode = CAN_RECEIVE.getMode();
SERIAL.printf("CAN BUS 发送模式 = %d,CAN BUS 接收模式 = %d\n\r",send_mode, receive_mode);
SERIAL.println("CAN BUS Shield 初始化成功!");
}
unsigned char stmp[64] = {0};
unsigned char len = 0;
unsigned char buf[64];
void loop() {
stmp[63] = stmp[63] + 1;
if (stmp[63] == 100) {
stmp[63] = 0;
stmp[62] = stmp[62] + 1;
if (stmp[62] == 100) {
stmp[62] = 0;
stmp[61] = stmp[62] + 1;
}
}
CAN_SEND.sendMsgBuf(0x00, 0, 15, stmp);
delay(100); // 每 100ms 发送数据
SERIAL.println("CAN BUS sendMsgBuf 成功!");
// ---------------------
if (CAN_MSGAVAIL == CAN_RECEIVE.checkReceive()) {
// 读取数据,len:数据长度,buf:数据缓冲区
SERIAL.println("checkReceive");
CAN_RECEIVE.readMsgBuf(&len, buf);
// 打印数据
for (int i = 0; i < len; i++) {
SERIAL.print(buf[i]); SERIAL.print(" ");
}
SERIAL.println();
}
SERIAL.println("---循环结束---");
}
原理图在线查看器
资源
- [PDF] 树莓派双通道 CAN-BUS(FD) 扩展板 (MCP2518FD) 原理图
- [ZIP] 树莓派双通道 CAN-BUS(FD) 扩展板原理图文件
- [ZIP] RPi 双通道 CAN FD 主控帽原理图文件
- [PDF] MCP2517 数据手册
- [PDF] MCP2557 数据手册
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。