4WD驱动平台V1.0
4WD驱动平台V1.0(不包含Intel Edison芯片)是一款支持四轮驱动的电机驱动板,能够对每个电机进行双向和全面控制。该驱动板最重要的特点是通过Grove接口实现的扩展性,这使您的项目更加多样化。它还提供详细且简单的SDK(软件开发工具包),可以加快您的开发过程。安装Edison后,您可以构建一个强大的系统来满足不同需求。

特点
- 支持USB到设备UART桥接
- 支持OTG(On The Go)
- 支持SPI编程端口
- 支持Grove接口:1个UART端口,3个I2C端口
- 支持双向四轮编码电机驱动(峰值电流:3A)
- 支持过流、过载和短路保护功能
- 提供详细且简单的SDK
- 专为Intel Edison平台设计
规格
| 基本参数 | |
| 输入电压 | 6-16V |
| 输出电压 | 5V/4V/3.3V/1.8V |
| 空载电流 | 小于150mA |
| 尺寸 | 130*110mm |
| 电机驱动 | |
| 驱动芯片 | MC33931(Freescale)* 4,独立 |
| 输入电压 | 5-30V |
| 输出电流 | 3A(最大) |
| 保护功能 | 过温、低电压和短路情况下自动切断输出 |
| 扩展性 | |
| I2C接口 | 3 |
| SPI接口 | 1 |
| UART接口 | 2 |
| USB OTG接口 | 1 |
应用场景
-
各种类型的机器人
-
电机驱动
-
玩具车
-
工业控制
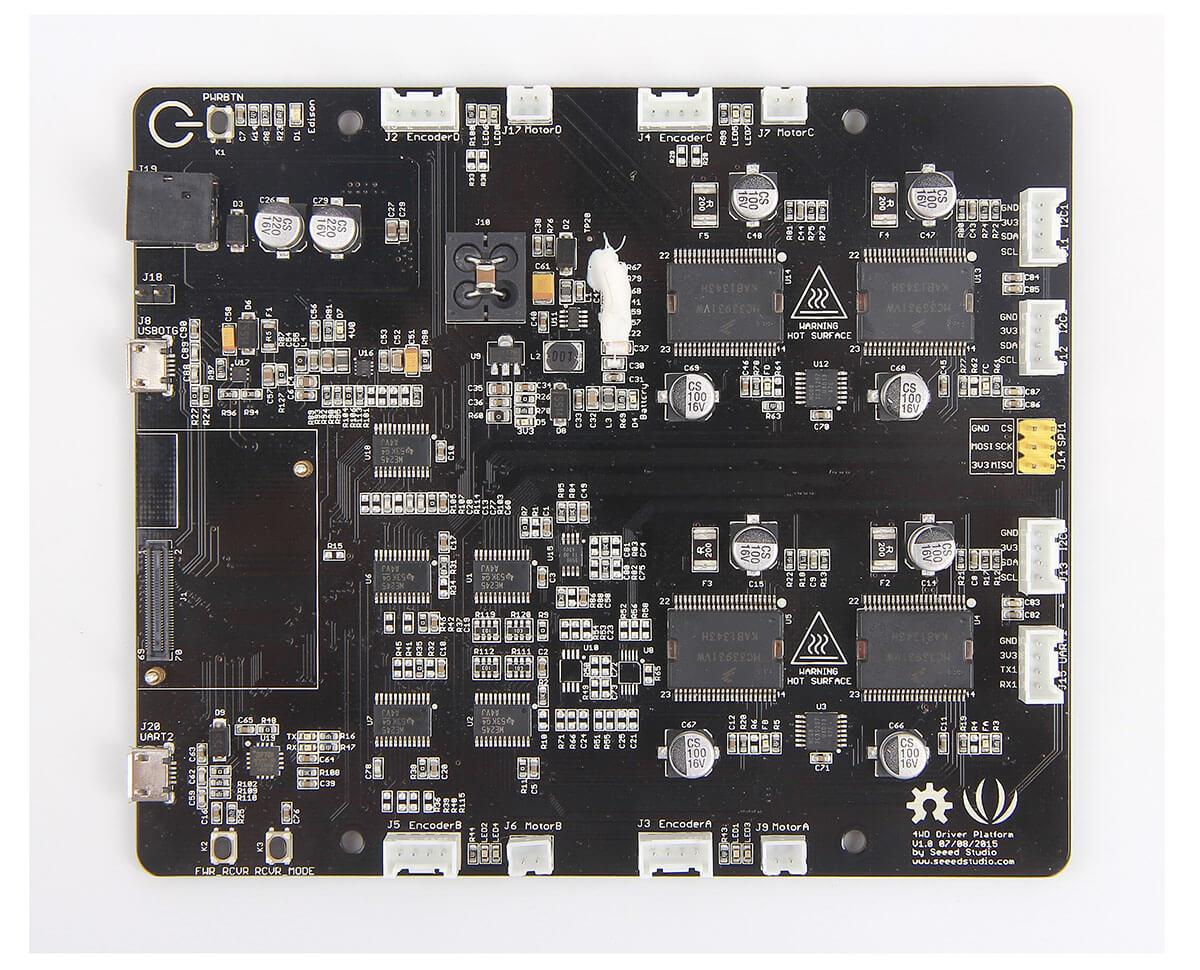
硬件概览

注意:所有电机接口和Grove模块仅支持3.3V电压。
入门指南
note
本节仅展示如何构建基本开发环境。 您可以按照以下指南为您的项目构建开发环境:
将Edison安装到4WD驱动板上
所需材料
-
4WD驱动平台V1.0 *1
-
Intel Edison *1
-
2根Micro B到Type A USB数据线
软件准备
提示:如果您的连接速度到Intel服务器不够快,我们建议您首次仅选择安装驱动程序和闪存工具。单独下载其他工具会更快。
note
目前4WD驱动平台V1.0不支持Windows 10。
检查您的IDE
-
打开设备管理器。
-
找到USB串行端口。在端口(COM & LPT)下找到_USB Serial Port(COMx)_(例如:USB Serial Port(COM3))。
-
启动Putty并按照下图所示进行配置(红色矩形标记部分)。
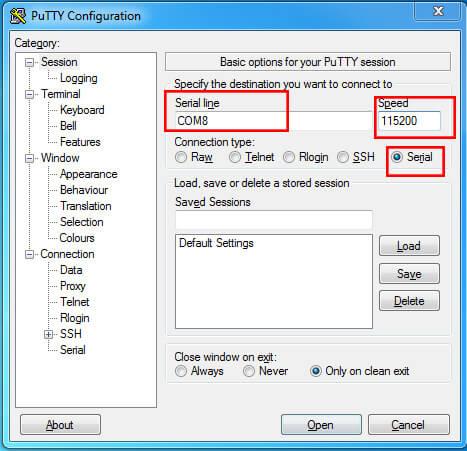 Putty配置
Putty配置
- 点击“Open”进入串行终端。

Putty登录界面
- 按下回车键输入用户名和密码登录Edison系统。
note
- 如果是您第一次使用Edison芯片,则不存在密码。
- 您可以使用Intel Flash Tool将最新固件镜像刷入Edison。
- 现在您的IDE已成功安装。
示例
note
- 本节将向您展示一个实现了一些简单功能的示例。
- 请确保您已按照前面的章节成功搭建开发环境,并假设您已经具备 Arduino 平台的基本知识。
您可以参考 Edison 4WD Auto Robotic Platform 2.0 了解使用 4WD Driver Platform V1.0 的实际应用。
在线原理图查看器
资源
技术支持与产品讨论
感谢您选择我们的产品!我们致力于为您提供各种支持,以确保您使用我们的产品时体验顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。