使用 Jetson Xavier NX 多摄像头的 DashCamNet 和 PeopleNet
介绍
如今,在自动驾驶、行车记录和违规监控领域,我们经常使用人工智能来帮助我们识别车辆信息、车牌和周围障碍物。得益于 Nvidia NGC 提供的大量预训练模型,我们可以更轻松地完成这些复杂任务。
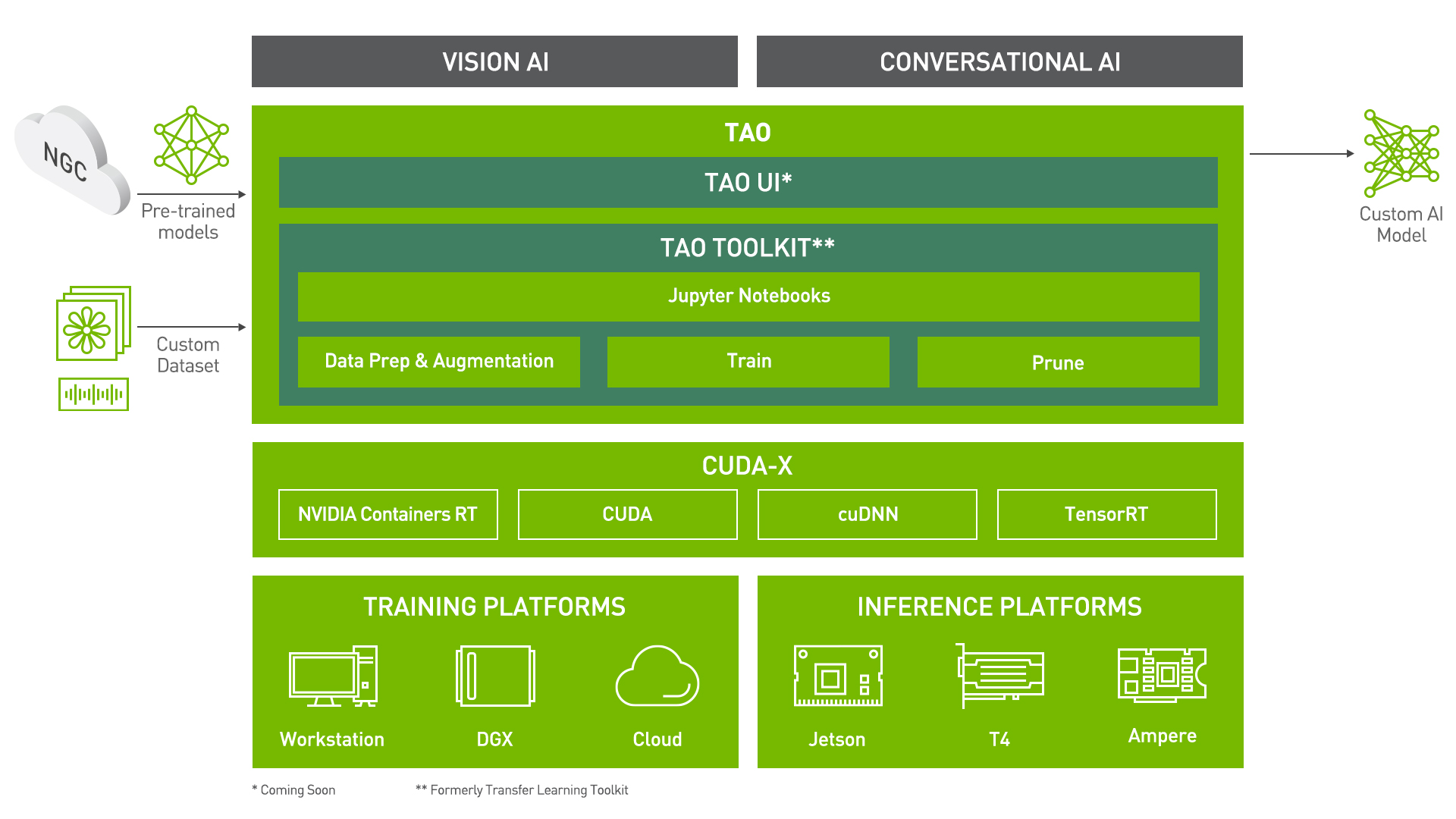
从零开始创建 AI/机器学习模型可能会花费大量时间和金钱。迁移学习是一种流行的技术,可用于将现有神经网络模型的学习特征提取到新模型中。NVIDIA TAO(训练、适应和优化)工具包是基于 CLI 和 Jupyter notebook 的 NVIDIA TAO 解决方案,它抽象了 AI/深度学习框架的复杂性,让您只需使用从零开始训练所需数据的一小部分就能对高质量的 NVIDIA 预训练 AI 模型进行微调。
TAO 工具包还支持 100 多种 NVIDIA 优化模型架构和骨干网络的排列组合,如 EfficientNet、YOLOv3/v4、RetinaNet、FasterRCNN、UNET 等等。
感谢 NVIDIA 的仓库和 Tomasz 的项目,我们将在 Jetson Xavier NX 上使用多摄像头检测汽车和人员。Jetson SUB Mini PC 非常适合这个演示。
NVIDIA TAO 工具包之前被称为 NVIDIA 迁移学习工具包(Tlt)。
材料需求
硬件设置

- USB 网络摄像头 / 树莓派摄像头 V2.1 / IMX219-130 8MP 摄像头 / 高质量 12.3MP IMX477 摄像头

- 带有 HDMI、DP 或 eDP 接口的显示器
- 运行 Linux 发行版操作系统的 PC
软件设置
- 适用于 Jetson Xavier NX 的 Jetpack 4.5 或 4.6
- Docker
- DeepStream
- TAO 工具包
- Python3.6 与 Pypi(python3-pip)和虚拟环境
- NVIDIA Container Toolkit
软件安装方法将在以下步骤中提供。
预安装
在开始项目之前,我们需要在 Ubuntu 上安装 Docker 引擎。有几种安装 Docker 引擎的方法,您可以根据需要选择任一种方法。如果您已经设置好了,可以跳过这一步。
- 大多数用户设置 Docker 的仓库并从中安装,以便于安装和升级任务,这是推荐的方法。
- 一些用户下载 DEB 包并手动安装,完全手动管理升级。这在诸如在无法访问互联网的隔离系统上安装 Docker 等情况下很有用。
- 在测试和开发环境中,一些用户选择使用自动化的便利脚本来安装 Docker。
这里我们将使用第一种方法。在安装 docker 之前,需要确保其版本是最新的。旧版本的名称可能是 docker、docker.io 或 docker-engine,您可以使用以下命令检查:
sudo apt-get purge docker docker-engine docker.io containerd runc
当您卸载 docker 时,/var/lib/docker/ 的内容,包括镜像、容器、卷和网络,都会被保留。如果您想要进行全新安装,可以参考本页面底部的卸载 Docker 引擎部分。
使用仓库安装 Docker
在新的主机上安装 Docker 引擎之前,需要先设置 Docker 仓库。之后,我们就可以从仓库安装和更新 Docker。
- 步骤 1. 使用
apt包设置仓库
更新 apt 包索引并安装包,以允许 apt 通过 HTTPS 使用仓库,使用以下命令:
sudo apt-get update
sudo apt-get install \
ca-certificates \
curl \
gnupg \
lsb-release
添加 Docker 的官方 GPG 密钥:
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /usr/share/keyrings/docker-archive-keyring.gpg
使用以下命令设置 stable 仓库。要添加 nightly 或 test 仓库,请在下面命令中的 stable 一词后添加 nightly 或 test(或两者都添加)。您可以在这里了解 nightly 和 test 频道。
echo \
"deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/ubuntu \
$(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
- 步骤 2. 安装 Docker 引擎
更新 apt 包索引,并使用以下命令安装 最新版本 的 Docker 引擎和 containerd:
sudo apt-get update
sudo apt-get install docker-ce docker-ce-cli containerd.io
我们可以通过运行 hello-world 镜像来验证 Docker Engine 是否正确安装。
sudo docker run hello-world
- 步骤 3. 通过以下过程将 Docker 作为非 root 用户进行管理。
创建 docker 组。
sudo groupadd docker
将用户添加到 docker 组。
sudo usermod -aG docker $USER
注销并重新登录以重新评估组成员身份。
通过运行 hello-world 验证您可以在不使用 sudo 的情况下运行 docker 命令
docker run hello-world
- 步骤 4. 通过以下过程设置 NVIDIA Container Toolkit:
设置 stable 仓库和 GPG 密钥:
distribution=$(. /etc/os-release;echo $ID$VERSION_ID) \
&& curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add - \
&& curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
更新软件包列表并安装 nvidia-docker2 软件包(及其依赖项):
sudo apt-get update
sudo apt-get install -y nvidia-docker2
设置默认运行时后,重启 Docker 守护进程以完成安装:
sudo systemctl restart docker
入门指南
安装 NVIDIA GPU Cloud CLI ARM64 Linux
NVIDIA GPU Cloud (NGC) CLI 是一个基于 Python 的命令行界面,用于管理 NGC 容器注册表中的 Docker 容器。使用 NGC CLI,您可以执行许多与 NGC 网站相同的操作,例如运行作业和查看组织和团队空间内的 Docker 存储库。
- 步骤 1. 前往 Download CLI 页面并下载包含二进制文件的 zip 文件。ARM64 的 NGC CLI 二进制文件在 Ubuntu 18.04 及更高版本的发行版上受支持。

- 步骤 2. 将 zip 文件传输到您有权限的目录中,解压缩并最终执行二进制文件。
您也可以通过移动到具有执行权限的目录,然后运行以下命令来从命令行下载、解压缩和安装:
wget -O ngccli_arm64.zip https://ngc.nvidia.com/downloads/ngccli_arm64.zip && unzip -o ngccli_arm64.zip && chmod u+x ngc
检查二进制文件的md5哈希值以确保文件在下载过程中未被损坏:
md5sum -c ngc.md5
- 步骤 3. 将当前目录添加到路径:
echo "export PATH=\"\$PATH:$(pwd)\"" >> ~/.bash_profile && source ~/.bash_profile
您必须为您的使用配置 NGC CLI 才能运行命令。
- 步骤 4. 输入以下命令,在提示时包含您的 API 密钥:
ngc config set
NGC API 密钥生成
配置 NGC CLI 需要 API 密钥,我们可以通过 NGC 网站生成它。
- 步骤 1. 前往网站并点击"Sign In/Sign Up"。

- 步骤 2. 注册一个 NVIDIA 开发者账户。

- 步骤 3. 选择一个账户继续。

- 步骤 4. 点击页面右上角的"Setup"。

- 步骤 5. 选择"Get API Key"。

- 步骤 6. 点击"Generate API Key"。

- 步骤 7. API 密钥将显示在页面底部。

安装 TAO Toolkit
首先应该安装 Python3 和 python3-pip:
sudo apt install -y python3 python3-pip
TAO Toolkit 是一个托管在 NVIDIA PyIndex 上的 Python pip 包。该包在底层使用 docker restAPI 与 NGC Docker 注册表交互,以拉取和实例化底层的 docker 容器。在前面的步骤中,我们已经设置了一个 NGC 账户并生成了与之关联的 API 密钥。如果您想了解更多关于安装先决条件部分的信息,您可以点击它以获取有关创建 NGC 账户和获取 API 密钥的详细信息。
虚拟环境 - Virtualenv
虚拟环境是 Python 的一个隔离工作副本,它允许您在特定项目上工作而不用担心影响其他项目。例如,您可以在需要 Django 1.3 的项目上工作,同时处理需要 Django 1.0 的项目。您可以点击这里来创建隔离的 Python 环境。
强烈建议首先配置虚拟环境,然后安装 TAO Toolkit。
- 您可以通过 pip 安装 virtualenv:
pip install virtualenv
- Create a virtual environment:
virtualenv venv
它会在你运行命令的目录中创建一个 Python 的副本,将其放置在名为 venv 的文件夹中。
- 激活虚拟环境:
source venv/bin/activate
- 如果你暂时完成了在虚拟环境中的工作,你可以停用它:
deactivate
这会让你回到系统默认的 Python 解释器,并可以使用所有已安装的库。
要删除虚拟环境,只需删除其文件夹即可。
virtualenvwarpper
不过,过一段时间后,你可能会在系统中积累很多虚拟环境,并且可能会忘记它们的名称或存放位置。因此,我们使用 virtualenvwarpper。virtualenvwrapper 提供了一组命令,使得使用虚拟环境变得更加愉快。它还会将所有虚拟环境放在一个地方。
你可以安装(确保已经安装了 virtualenv):
pip install virtualenvwrapper
export WORKON_HOME=~/Envs
source /usr/local/bin/virtualenvwrapper.sh
如果您想了解更多相关信息,请参考 完整的 virtualenvwrapper 安装说明。)
您可以按照此链接中的说明使用 virtualenvwrapper 设置 Python 虚拟环境。
在虚拟环境中设置 Python 版本
-
步骤 1. 按照说明安装
virtualenv和virtualenvwrapper后,在virtualenv中设置 Python 版本。这可以通过以下任一方式完成: -
定义名为 VIRTUALENVWRAPPER_PYTHON 的环境变量。此变量应指向本地机器上安装 python3 二进制文件的路径。您也可以将其添加到
.bashrc或.bash_profile中,以便默认设置您的 Pythonvirtualenv。
export VIRTUALENVWRAPPER_PYTHON=/usr/bin/python3
- 使用
virtualenvwrapper包装器创建virtualenv时设置 python3 二进制文件的路径
mkvirtualenv launcher -p /path/to/your/python3
- 步骤 2. 一旦您登录到
virtualenv,命令提示符应该显示您的虚拟环境的名称
(launcher) py-3.6.9 desktop:
- 步骤 3. 当您完成会话后,可以使用
deactivate命令来停用您的virtualenv:
deactivate
-
步骤 4。你可以使用
workon命令重新激活这个创建的virtualenv环境。workon launcher
安装 TAO 包
-
步骤 1. 我们已经设置好了所需的环境。现在我们可以使用以下命令安装名为
nvidia-tao的 TAO Launcher Python 包。pip3 install nvidia-pyindex
pip3 install nvidia-tao -
步骤 2. 使用
tao命令调用入口点。
tao --help
上述命令的示例输出为:
usage: tao [-h]
{list,stop,info,augment,bpnet,classification,detectnet_v2,dssd,emotionnet,faster_rcnn,fpenet,gazenet,gesturenet,
heartratenet,intent_slot_classification,lprnet,mask_rcnn,punctuation_and_capitalization,question_answering,
retinanet,speech_to_text,ssd,text_classification,converter,token_classification,unet,yolo_v3,yolo_v4,yolo_v4_tiny}
...
Launcher for TAO
optional arguments:
-h, --help show this help message and exit
tasks:
{list,stop,info,augment,bpnet,classification,detectnet_v2,dssd,emotionnet,faster_rcnn,fpenet,gazenet,gesturenet,heartratenet
,intent_slot_classification,lprnet,mask_rcnn,punctuation_and_capitalization,question_answering,retinanet,speech_to_text,
ssd,text_classification,converter,token_classification,unet,yolo_v3,yolo_v4,yolo_v4_tiny}
-
步骤 3. 注意在任务下你可以看到所有启动器可调用的任务。以下是帮助使用 TAO 启动器处理启动命令的具体任务:
- list
- stop
- info
注意: 如果终端提示 "bash: Cannot find tao",请使用此命令:
export PATH=$PATH:~/.local/bin
tao --help
Install DeepStream5
- 步骤 1. 编辑
/etc/apt/sources.list.d/nvidia-l4t-apt-source.list文件,将 .6 替换为 .5:
deb https://repo.download.nvidia.com/jetson/common r32.5 main
#deb https://repo.download.nvidia.com/jetson/common r32.6 main
deb https://repo.download.nvidia.com/jetson/t194 r32.5 main
#deb https://repo.download.nvidia.com/jetson/t194 r32.6 main
- 步骤 2. 输入
sudo apt update并再次尝试安装 DeepStream 5.1。
然后使用以下命令安装:
sudo -H pip3 install pyds-ext
如需更多信息,请查看以下链接:
安装 Jetson 多摄像头管道并快速开始
最后,我们将构建一个典型的多摄像头管道,即 N×(capture)->preprocess->batch->DNN-> your application logic here ->encode->file I/O + display,底层使用 gstreamer 和 deepstream。通过 jetmulticam 包提供编程访问来配置 python 中的管道。
该项目利用 Nvidia 硬件加速来最小化 CPU 使用率。例如,您可以在 6 个摄像头流上实时执行目标检测,仅使用 16.5% 的 CPU。您可以通过访问图像数据(通过 np.array)以及目标检测结果,轻松地在 python 中构建自定义逻辑。
- 步骤 1. 使用以下命令安装 Jetson 多摄像头管道:
git clone https://github.com/NVIDIA-AI-IOT/jetson-multicamera-pipelines.git
cd jetson-multicamera-pipelines
bash scripts/install_dependencies.sh
sudo -H pip3 install Cython
sudo -H pip3 install .
- 步骤 2. 使用你的相机运行示例:
source scripts/env_vars.sh
cd examples
sudo -H python3 example.py
这是"example.py",你可以将其应用于单目相机或多相机。
import time
from jetmulticam import CameraPipelineDNN
from jetmulticam.models import PeopleNet, DashCamNet
if __name__ == "__main__":
pipeline = CameraPipelineDNN(
cameras=[2, 5, 8],
models=[
PeopleNet.DLA1,
DashCamNet.DLA0,
# PeopleNet.GPU
],
save_video=True,
save_video_folder="/home/nx/logs/videos",
display=True,
)
while pipeline.running():
arr = pipeline.images[0] # np.array with shape (1080, 1920, 3), i.e. (1080p RGB image)
dets = pipeline.detections[0] # Detections from the DNNs
time.sleep(1/30)
这是多摄像头显示的结果,如下所示:
更多
支持更多模型/加速器:
pipeline = CameraPipelineDNN(
cam_ids = [0, 1, 2]
models=[
models.PeopleNet.DLA0,
models.PeopleNet.DLA1,
models.PeopleNet.GPU,
models.DashCamNet.DLA0,
models.DashCamNet.DLA1,
models.DashCamNet.GPU
]
# ...
)
注意: 如果终端提示"EGL Not found",请检查 EGLDevice。
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。