齿轮步进电机驱动套件

齿轮步进电机驱动套件包括一个步进电机和一个电机驱动板。这是一款四相八步步进电机,您可以通过驱动板轻松控制该步进电机。
您可以使用该套件进行位置控制。

特点
- 低噪音
- 大扭矩
- 内置齿轮箱
规格
| 项目 | 参数 |
|---|---|
| 工作电压 | 5V |
| 相数 | 4 |
| 减速比 | 1/64 |
| 步距角 | 5.625°/64 |
| 直径 | 28mm / Nema 11 |
| 空载吸入频率 | >500HZ |
| 空载排出频率 | >1000HZ |
| 电阻 | 21±7% |
| 噪音 | ≤40dB |
| 驱动模式 | 四相八步驱动 |
典型应用
- 桌面打印机
- 绘图仪
- 3D打印机
- CNC铣床
硬件概览
引脚图


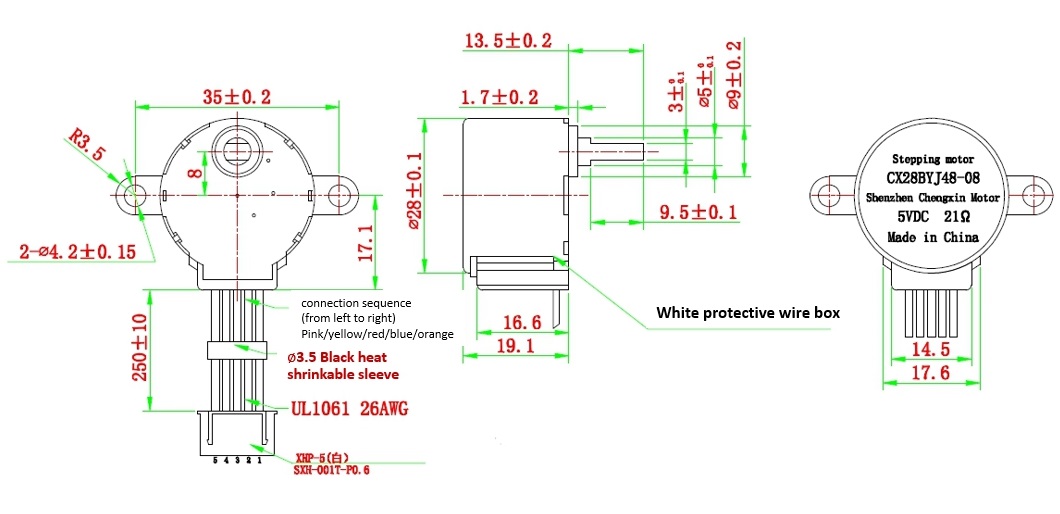
机械图
您可以点击查看原始图片。
支持的平台
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
:::提示 上述提到的支持平台仅表示模块的软件或理论兼容性。我们通常仅为 Arduino 平台提供软件库或代码示例。无法为所有可能的 MCU 平台提供软件库或演示代码。因此,用户需要自行编写软件库。 :::
入门指南
使用 Arduino
硬件
所需材料
| Seeeduino V4.2 | 齿轮步进电机驱动套件 | 母-公跳线 |
|---|---|---|
 |  |  |
| 立即购买 | 立即购买 | 立即购买 |
- 步骤 1. 使用跳线将齿轮步进电机驱动板连接到 Seeeduino。
| Seeeduino | 齿轮步进电机驱动板 |
|---|---|
| 数字引脚 8 | IN1 |
| 数字引脚 9 | IN2 |
| 数字引脚 10 | IN3 |
| 数字引脚 11 | IN4 |
| GND | GND |
| VCC_5V | VCC |
| VCC_5V | VM |
您可以将 VM 引脚连接到 VCC_5V,也可以选择不使用它,只需在开关中选择 VCC 即可。
-
步骤 2. 将步进电机插入齿轮步进电机驱动板。
-
步骤 3. 使用 USB 数据线将 Seeeduino 连接到电脑。

软件
如果这是您第一次使用 Arduino,我们强烈建议您在开始之前查看 Arduino 入门指南。
- 步骤 1. 点击代码块右上角的图标
 ,将以下代码复制到 Arduino IDE 的新草稿中。
,将以下代码复制到 Arduino IDE 的新草稿中。
int pwm1=9;
int pwm2=10;
int ctr_a =9;
int ctr_b =8;
int ctr_c =11;
int ctr_d =10;
int sd =6;
int i=0;
int t=1500;
void setup()
{
pinMode(ctr_a,OUTPUT);
pinMode(ctr_b,OUTPUT);
pinMode(ctr_c,OUTPUT);
pinMode(ctr_d,OUTPUT);
delay(1);
}
void loop ()
{
for(i=1500;i>=1;i--)
{
digitalWrite(ctr_a,LOW);//A
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,HIGH);
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,LOW);
digitalWrite(ctr_b,LOW);//AB
digitalWrite(ctr_c,HIGH);
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,LOW);//B
digitalWrite(ctr_c,HIGH);
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,LOW);
digitalWrite(ctr_c,LOW);//BC
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,LOW);//C
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,LOW);//CD
digitalWrite(ctr_d,LOW);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,HIGH);//D
digitalWrite(ctr_d,LOW);
delayMicroseconds(t);
digitalWrite(ctr_a,LOW);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,HIGH);//DA
digitalWrite(ctr_d,LOW);
delayMicroseconds(t);
}
}
- 步骤 2. 上传示例代码。如果您不知道如何上传代码,请查看 如何上传代码。
如果一切正常,您可以看到电机运行:

Raspberry Pi + Python
所需材料
| Pi Pico | 齿轮步进电机驱动套件 | 母-母跳线 |
|---|---|---|
 | | |
| 立即购买 | 立即购买 | 立即购买 |
背景
步进电机内部有 4 个独立的电磁铁,您需要按顺序逐个供电以使齿轮转动一个刻度。齿轮有 64 个刻度,因此您需要重复 64 次才能完成轴的一次完整旋转。
您可以手动逐个供电,也可以使用诸如 RpiMotorLib 这样的库。
方法
-
如果尚未完成,请按照 此指南 设置您的 Raspberry Pi Pico,使其通过 Thonny 和 picozero 在电脑上运行 Python。
-
使用跳线将齿轮步进电机驱动板连接到 Pi Pico。
Pi Pico 齿轮步进电机驱动板 VBUS VCC GND GND GP2 IN1 GP3 IN2 GP4 IN3 GP5 IN4 -
仔细观察你的齿轮步进电机驱动板,你会看到一个非常小的开关,一端标有 VCC,另一端标有 VM。这个开关允许你选择是使用驱动器的同一引脚(VCC)为电机供电,还是使用单独的电压源(VM)。现在我们只使用 VCC。确保开关设置在 VCC。
-
使用 USB 将你的 Pi Pico 插入电脑(或通过无线连接),然后打开 Thonny。
-
将以下代码上传到 Thonny 并运行。
from gpiozero import Button, LED
from time import sleep
wait = 0.001 # 秒
ctrA = LED(2) # IN1
ctrB = LED(3) # IN2
ctrC = LED(4) # IN3
ctrD = LED(5) # IN4
while True:
# A
ctrA.on()
ctrB.off()
ctrC.off()
ctrD.off()
sleep(wait)
# AB
ctrA.on()
ctrB.on()
ctrC.off()
ctrD.off()
sleep(wait)
# B
ctrA.off()
ctrB.on()
ctrC.off()
ctrD.off()
sleep(wait)
# BC
ctrA.off()
ctrB.on()
ctrC.on()
ctrD.off()
sleep(wait)
# C
ctrA.off()
ctrB.off()
ctrC.on()
ctrD.off()
sleep(wait)
# CD
ctrA.off()
ctrB.off()
ctrC.on()
ctrD.on()
sleep(wait)
# D
ctrA.off()
ctrB.off()
ctrC.off()
ctrD.on()
sleep(wait)
# DA
ctrA.on()
ctrB.off()
ctrC.off()
ctrD.on()
sleep(wait)
这里发生了什么? 步进电机内部有 4 个独立的电磁铁。你正在循环逐个为它们供电,这会使齿轮转动一个刻度。快速重复 64 次,轴就会完成一次完整旋转!
使用库
你也可以使用类似 RpiMotorLib 的库来简化操作:
-
在 Thonny 中点击 -> Tools -> Manage packages -> 搜索
RpiMotorLib-> 安装 -
按照上一节中的相同接线步骤操作
-
将代码替换为以下内容:
from RpiMotorLib import RpiMotorLib
GpioPins = [2, 3, 4, 5]
mymotortest = RpiMotorLib.BYJMotor("MyMotorName", "28BYJ")
mymotortest.motor_run(GpioPins, 0.001, 512, False, False, "half", 0.05)
上面代码中的 "28BYJ" 指的是你使用的步进电机型号。你可以在 RpiMotorLib 文档 中找到其他参数的解释。(虽然使用的是不同的驱动板,但大部分内容是相同的)。
资源
-
[Zip] 齿轮步进电机驱动板 Eagle 文件
-
[PDF] CX28BYJ48 电机数据手册
技术支持与产品讨论
感谢您选择我们的产品!我们致力于为您提供各种支持,以确保您使用我们的产品时体验顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。