Grove - 三轴数字加速度计±16g超低功耗 (BMA400)

Grove - 三轴数字加速度计 ±16g 超低功耗 (BMA400) 是一款 12 位数字三轴加速度传感器,具有智能芯片上的运动和位置触发中断功能。它可以检测您的运动姿态,例如步行、跑步、静止站立。

版本
| 产品版本 | 变更 | 发布日期 |
|---|---|---|
| Grove - 三轴数字加速度计 ±16g 超低功耗 (BMA400) | 初始版本 | 2018年11月 |
特性
- 超低功耗
- 可编程功能
- 芯片上的 FIFO
- 芯片上的中断功能
自动低功耗/自动唤醒
活动/非活动
步数计数器
活动识别(步行、跑步、静止站立)
方向检测
单击/双击
规格
| 项目 | 参数 |
|---|---|
| 工作电压 | 3.3V / 5V |
| 功耗 | 18uA @5V / 14uA @3.3V |
| 工作温度 | -40℃ ~ +85℃ |
| 加速度范围 | ±2g, ±4g, ±8g, ±16g |
| 灵敏度 | 1024LSB/g / @±2g 512LSB/g / @±4g256LSB/g / @±8g128LSB/g / @±16g |
| 接口 | I^2^C |
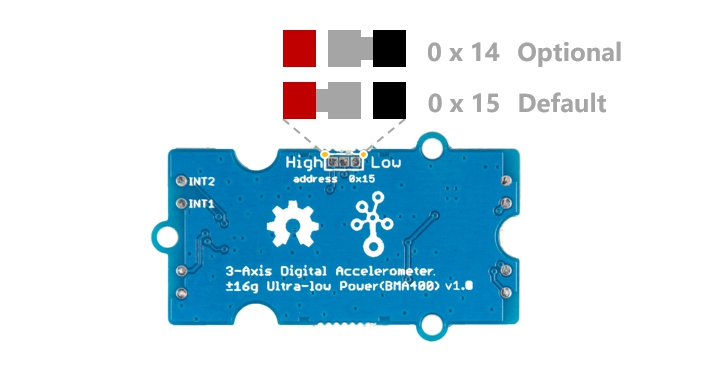
| I^2^C 地址 | 0x15(默认) / 0x14(可选) |
| 尺寸 | 长: 40mm 宽: 20mm 高: 10mm |
| 重量 | 3.2g |
| 包装尺寸 | 长: 140mm 宽: 90mm 高: 10mm |
| 毛重 | 10g |
典型应用
- 超低电流消耗的步数计数,延长电池寿命
- 健身应用 / 活动追踪
- 单击 / 双击感应
- 掉落检测,用于保修记录
- 窗户/门测量,用于气候控制和报警系统
硬件概述
引脚定义

原理图
电源

BMA400 的典型电压为 1.8V,因此我们使用 XC6206P182MR 芯片来提供稳定的 1.8V。XC6206P33 的输入范围为 1.8V 至 6.0V,因此您可以在 3.3V 和 5V 的 Arduino 上使用此模块。
双向电平转换电路

这是一个典型的双向电平转换电路,用于连接 I^2^C 总线的两个不同电压部分。该传感器的 I2C 总线使用 1.8V,如果 Arduino 的 I2C 总线使用 5V 或 3.3V,则需要此电路。在上面的原理图中,Q1 和 Q2 是 N 型 MOSFET CJ2102,它们充当双向开关。为了更好地理解这一部分,您可以参考 AN10441。
支持的平台
| Arduino | 树莓派 |
|---|---|
|
|
上述提到的支持平台仅表示模块的软件或理论兼容性。我们通常只为 Arduino 平台提供软件库或代码示例。不可能为所有可能的 MCU 平台提供软件库或演示代码。因此,用户需要自行编写软件库。
入门指南
使用 Arduino
硬件
所需材料
| Seeeduino V4.2 | Base Shield | Grove BMA400 |
|---|---|---|
|
|
|
| 立即购买 | 立即购买 | 立即购买 |



-
步骤 1. 将 Grove - 3 轴数字加速度计 ±16g 超低功耗 (BMA400) 连接到 Grove-Base Shield 的 I^2^C 接口。
-
步骤 2. 将 Grove - Base Shield 插入 Seeeduino。
-
步骤 3. 使用 USB 数据线将 Seeeduino 连接到电脑。

如果没有 Grove Base Shield,我们也可以直接将模块连接到 Seeeduino,如下所示。
| Seeeduino | Grove 数据线 | Grove BMA400 |
|---|---|---|
| GND | 黑色 | GND |
| 5V 或 3.3V | 红色 | VCC |
| SDA | 白色 | SDA |
| SCL | 黄色 | SCL |
软件
如果这是您第一次使用 Arduino,我们强烈建议您在开始之前查看 Arduino 入门指南。
-
步骤 1. 从 Github 下载 Seeed_BMA400 库。
-
步骤 2. 参考 如何安装库 为 Arduino 安装库。
-
步骤 3. 重启 Arduino IDE。打开示例代码,可以通过以下三种方式打开:
- 直接在 Arduino IDE 中通过路径打开:文件 --> 示例 --> Grove 3 轴数字加速度计 ±16g 超低功耗 (BMA400) --> BMA400_Example。

- 在电脑中找到并点击 BMA400_Example.ino 文件,路径为 XXXX\Arduino\libraries\Grove_3Axis_Digital_Accelerometer_BMA400-master\examples\BMA400_Example,其中 XXXX 是您安装 Arduino IDE 的位置。

- 或者,您可以直接点击代码块右上角的图标
将以下代码复制到 Arduino IDE 的新草图中。
#include "BMA400.h"
float x = 0, y = 0, z = 0;
int16_t temp = 0;
void setup(void)
{
Wire.begin();
Serial.begin(115200);
while(!Serial);
Serial.println("BMA400 原始数据");
while(1)
{
if(bma400.isConnection())
{
bma400.initialize();
Serial.println("BMA400 已连接");
break;
}
else Serial.println("BMA400 未连接");
delay(2000);
}
}
void loop(void)
{
bma400.getAcceleration(&x, &y, &z);
temp = bma400.getTemperature();
Serial.print(x);
Serial.print(",");
Serial.print(y);
Serial.print(",");
Serial.print(z);
Serial.print(",");
Serial.print(temp);
Serial.println();
delay(50);
}
库文件可能会更新。此代码可能不适用于更新后的库文件,因此我们建议您使用前两种方法。
-
步骤 4. 上传示例代码。如果您不知道如何上传代码,请查看 如何上传代码。
-
步骤 5. 打开 Arduino IDE 的 串口监视器,点击 工具->串口监视器。或者同时按下 ++ctrl+shift+m++ 键。将波特率设置为 115200。
如果一切正常,可能会显示如下内容:
BMA400 原始数据
BMA400 已连接
85.94,357.42,916.02,23
-148.44,222.66,464.84,23
-626.95,320.31,1109.38,23
-500.00,-111.33,144.53,23
-398.44,-232.42,433.59,23
-783.20,-255.86,638.67,23
-1453.13,-552.73,822.27,23
原始数据格式:
X轴/单位 mg;Y轴/单位 mg;Z轴/单位 mg;温度/单位 ℃
在线原理图查看器
资源
-
[Zip] Seeed BMA400 库
-
[PDF] BMA400 数据手册
-
[PDF] XC6206 数据手册
技术支持与产品讨论
感谢您选择我们的产品!我们致力于为您提供多种支持,确保您使用我们的产品时体验顺畅。我们提供了多种沟通渠道,以满足不同的偏好和需求。