Grove - I2C 电机驱动器 (TB6612FNG)

Grove - I2C 电机驱动器 (TB6612FNG) 可驱动两个直流电机,最高支持 12V/1.2A,或驱动一个步进电机,最高支持 12V/1.2A。借助板载 MCU,它可以通过 Grove I2C 接口轻松与 Arduino 配合使用。
该驱动板基于 TB6612FNG,这是一款用于直流电机和步进电机的驱动 IC,采用 LD MOS 结构的输出晶体管,具有低导通电阻。通过两个输入信号 IN1 和 IN2,可以选择四种模式:顺时针 (CW)、逆时针 (CCW)、短刹车和停止模式。

版本
| 产品版本 | 变更 | 发布日期 |
|---|---|---|
| Grove - I2C 电机驱动器 (TB6612FNG) | 初始版本 | 2018年9月 |
特性
- 板载 MCU
- 顺时针/逆时针/短刹车/停止功能模式
- 内置热关断电路和低电压检测电路
- 待机(节能)系统
规格
| 项目 | 参数 |
|---|---|
| MCU 工作电压 | 3.3V / 5V |
| 电机供电电压 | 2.5 ~ 13.5 (典型值 5V,最大值 15V) |
| 输出电流 | 1.2 A(平均)/3.2 A (峰值) |
| 开关频率 | 100kHz |
| 逻辑接口 | I2C |
| I2C 地址 | 0x14 (默认) |
| I2C 地址范围 | 0x01 ~ 0x7f (可配置) |
| 尺寸 | 长: 60mm 宽: 40mm 高: 12mm |
| 重量 | 13g |
| 包装尺寸 | 长: 140mm 宽: 90mm 高: 12mm |
| 毛重 | 20g |
典型应用
- 直流电机控制
- 步进电机控制
硬件概览
引脚分布


硬件详情
I2C 接口
该板使用 I2C 接口,使板载 MCU 能够与主机通信。
GND: 将此模块连接到系统 GND
VCC: 此模块可以使用 5V 或 3.3V
SDA: I2C 串行数据
SCL: I2C 串行时钟

电源输入
为电机提供直流电源,输入范围为 2.5V ~ 13.5V。
GND: 连接到系统 GND,插入电源 "-"
VM: 插入电源 "+",为电机供电。

直流电机输出
该板具有两个直流电机输出通道,每通道可输出 12V/1.2A。您可以使用此驱动板同时控制两个直流电机。
A1: 通道 A 输出 1
A2: 通道 A 输出 2
B1: 通道 B 输出 1
B2: 通道 B 输出 2

步进电机输出
您也可以使用此板控制 4 线步进电机,最高可输出 12V/1.2A。
OUT1: 连接到步进电机线圈 1 的一个输入端。
OUT2: 连接到步进电机线圈 1 的另一个输入端。
OUT3: 连接到步进电机线圈 2 的一个输入端。
OUT4: 连接到步进电机线圈 2 的另一个输入端。
实际上,直流端口和步进端口在物理上是连接在一起的。连接图如下:
| 直流端口 | 步进端口 |
|---|---|
| A1 | OUT1 |
| A2 | OUT2 |
| B1 | OUT3 |
| B2 | OUT4 |
支持的平台
| Arduino | 树莓派 (Raspberry Pi) | |||
|---|---|---|---|---|
上述提到的支持平台仅表示模块的软件或理论兼容性。我们通常仅为 Arduino 平台提供软件库或代码示例。不可能为所有可能的 MCU 平台提供软件库或演示代码。因此,用户需要自行编写软件库。
入门指南
使用 Arduino
硬件
所需材料
直流电机演示
| Seeeduino V4.2 | 基础扩展板 (Base Shield) | Grove - I2C 电机驱动 (TB6612FNG) | 直流电机 (DC Motor) |
|---|---|---|---|
 |  |  |  |
| 立即购买 | 立即购买 | 立即购买 | 立即购买 |
-
步骤 1. 将直流电机插入驱动板的 DC Motor Output 接口,将外部直流电源插入 Power In 接口。
-
步骤 2. 将 Grove - I2C 电机驱动 (TB6612FNG) 连接到 Grove 基础扩展板的 I^2^C 接口。
-
步骤 3. 将 Grove 基础扩展板插入 Seeeduino。
-
步骤 4. 使用 USB 数据线将 Seeeduino 连接到电脑。

步进电机演示
| Seeeduino V4.2 | 基础扩展板 (Base Shield) | Grove - I2C 电机驱动 (TB6612FNG) | 步进电机 (Stepper Motor) |
|---|---|---|---|
| | |  |
| 立即购买 | 立即购买 | 立即购买 | 立即购买 |
- 步骤 1. 将步进电机连接到驱动板的 Stepper Motor Output 接口,将外部直流电源插入 Power In 接口。
此驱动板适用于 4 线步进电机。根据您使用的步进电机,接线颜色可能不同。我们使用的是 24BYJ48 电机,接线如下表所示:
| 引脚名称 | 步进电机的线 | 线颜色 (24BYJ48) |
|---|---|---|
| OUT1 | 线圈 1 的一端 | 橙色 |
| OUT2 | 线圈 1 的另一端 | 蓝色 |
| OUT3 | 线圈 2 的一端 | 粉色 |
| OUT4 | 线圈 2 的另一端 | 黄色 |

-
步骤 2. 将 Grove - I2C 电机驱动 (TB6612FNG) 连接到 Grove 基础扩展板的 I^2^C 接口。
-
步骤 3. 将 Grove 基础扩展板插入 Seeeduino。
-
步骤 4. 使用 USB 数据线将 Seeeduino 连接到电脑。

由于直流端口和步进端口物理上是连接在一起的,您也可以使用两个直流端口来控制步进电机。连接图如下:

如果我们没有 Grove 基础扩展板,我们也可以直接将此模块连接到 Seeeduino,如下所示。
| Seeeduino | Grove 电缆 | Grove - I2C 电机驱动器 (TB6612FNG) |
|---|---|---|
| GND | 黑色 | GND |
| 5V 或 3.3V | 红色 | VCC |
| SDA | 白色 | SDA |
| SCL | 黄色 | SCL |
软件
如果这是您第一次使用 Arduino,我们强烈建议您在开始之前查看 Arduino 入门指南。
-
步骤 1. 从 Github 下载 Grove_Motor_Driver_TB6612FNG 库。
-
步骤 2. 参考 如何安装库 为 Arduino 安装库。
-
步骤 3. 重启 Arduino IDE。打开默认示例,我们为您提供了两个示例:
dc_motor: 直流电机演示
stepper_motor_2phase: 4线2相步进电机演示。
您可以通过以下两种方式打开它们(以 dc_motor 为例):
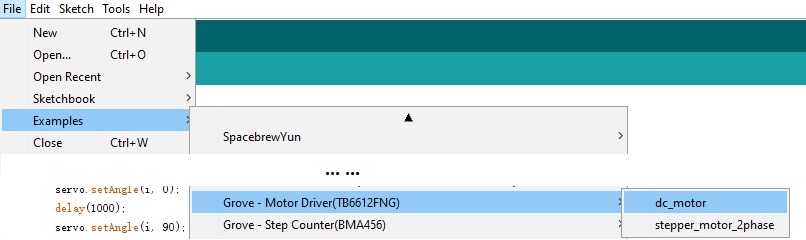
- 直接在 Arduino IDE 中通过路径打开:File --> Examples --> Grove - Motor Driver(TB6612FNG) --> dc_motor。
- 在您的电脑中打开,点击 dc_motor.ino,您可以在文件夹 XXXX\Arduino\libraries\Grove_Motor_Driver_TB6612FNG-master\examples\dc_motor 中找到它,其中 XXXX 是您安装 Arduino IDE 的位置。

- 步骤 4. 上传示例代码。如果您不知道如何上传代码,请查看 如何上传代码。
如果一切正常,当您为外部电源端口供电时,电机将运行。
使用 Raspberry Pi 4 计算机
硬件
所需材料
直流电机演示
| Raspberry Pi 4 计算机 | Grove Raspberry Pi 基础扩展板 | Grove - I2C 电机驱动器 (TB6612FNG) | 直流电机 |
|---|---|---|---|
 |  | | |
| 立即购买 | 立即购买 | 立即购买 | 立即购买 |
- 步骤 1. 将直流电机插入驱动板的 DC Motor Output 端口,将外部直流电源插入 Power In 端口。

-
步骤 2. 将 Grove - I2C 电机驱动器 (TB6612FNG) 连接到 Grove Raspberry Pi 基础扩展板的 I^2^C 端口。
-
步骤 3. 将 Grove Raspberry Pi 基础扩展板插入 Raspberry Pi 4 计算机。
-
步骤 4. 将 Raspberry Pi 4 计算机连接到显示器。

如果这是您第一次使用 Raspberry Pi,请在开始之前参考 Raspberry 入门指南。
软件
如果您使用的是 Raspberry Pi,且 Raspberrypi OS >= Bullseye,您必须仅使用 Python3 执行此命令行。 感谢 MarkusBansky 提供 Grove_Motor_Driver_TB6612FNG 的软件库和学习资源,用于 Raspberry Pi 4 和 Python3。 这是 Grove Arduino 库 的移植版本,适用于 Grove I2C 电机驱动器 TB6612FNG。
要求
- RaspberryPi Linux 镜像
- Python 3.6+
- smbus 库
- time 库
- math 库
该库包含 6 个用于电机平滑启动的缓动函数。 缓动函数目前只能同时用于单个电机。 包含 IN 和 OUT 函数。
如何使用库
如果您使用的是 Raspberry Pi,且 Raspberrypi OS >= Bullseye,您必须仅使用 Python3 执行此命令行。
首先,请确保您运行的是最新发布版本的 pip。此库要求您向 pip.conf 添加额外的 index-url,以便安装它。您可以通过使用 sudo nano /etc/pip.conf 编辑配置文件,并在 [global] 部分之后插入以下行:
index-url=https://pypi.python.org/
现在,您可以像往常一样安装该软件包,对于 Python3,请使用以下示例代码:
python3 -m pip install raspberry-i2c-tb6612fng
成功安装库后,请进入 raspberry-i2c-tb6612fng 文件夹,使用以下代码:
cd raspberry-i2c-tb6612fng
最后一步是运行测试代码。
python3 test.py

如果一切正常,当您输入 python3 test.py 时,电机将开始运行。
在线原理图查看器
资源
-
[PDF] TB6612FNG 数据手册
技术支持与产品讨论
感谢您选择我们的产品!我们致力于为您提供多种支持,以确保您使用我们的产品时体验顺畅。我们提供多个沟通渠道,以满足不同的偏好和需求。