带有电池管理芯片的 XIAO Grove 扩展板

概述
Seeed Studio Grove Base for XIAO 是一款即插即用的 Grove 扩展板,专为 Seeed Studio XIAO 设计。通过板载电池管理芯片和电池焊接焊盘,您可以轻松使用锂电池为 Seeed Studio XIAO 供电并进行充电。板载 8 个 Grove 连接器,包括两个 Grove I2C 和一个 UART。它充当 Seeed Studio XIAO 和 Seeed 的 Grove 系统之间的桥梁。Flash SPI 焊接焊盘允许您为 Seeed Studio XIAO 添加 Flash 以扩展其内存空间,为 Seeed Studio XIAO 提供更多可能性。
通过板载电池管理芯片和电池焊接焊盘,您可以轻松使用锂 3.7V 电池为 Seeed Studio XIAO 供电并进行充电,使您的项目,特别是可穿戴项目,更加灵活和便携。您甚至可以根据项目的实际需要通过板载 PCB 邮票孔掰断电路板(掰断后尺寸仅为 25*39mm),使其比小更小,重量也会从 13g 减少到 10g!
作为扩展板,Seeed Studio Grove Base for XIAO 还引出了 Seeed Studio XIAO 的所有 14 个引脚,其板载电源开关和充电状态指示灯使其更加用户友好。该扩展板甚至为可能需要为 Seeed Studio XIAO 添加 Flash 以扩展其内存空间的高级开发者预留了 SPI-Flash 焊接焊盘,为 Seeed Studio XIAO 提供更多可能性。
作为 Seeed Studio XIAO 外形规格,所有 Seeed Studio XIAO 板都支持 Grove Shield for XIAO 和 Seeed Studio XIAO Expansion board。引脚之间存在细微差异,参考引脚图很容易管理。
本产品不包含 Seeed Studio XIAO 板,如果您需要,请点击这里。
硬件概述
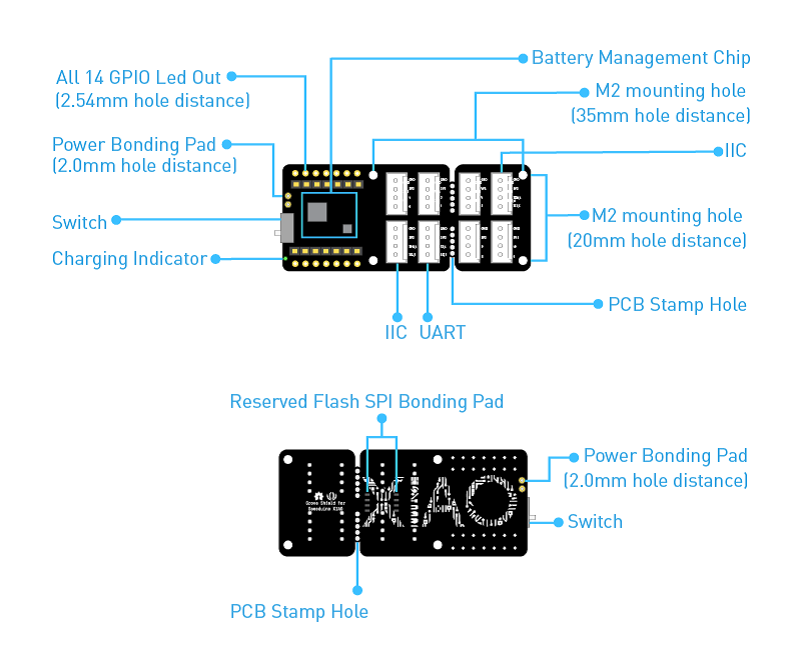
引脚说明

特性
- 板载锂电池充电和管理功能
- Grove 连接器(Grove IIC x 2,Grove UART x 1),所有 14 个 GPIO 引出
- 紧凑可分离设计
- 预留 Flash SPI 焊盘
- 板载电源开关和充电状态指示灯
规格
| 项目 | 值 |
|---|---|
| 工作电压 | 3.3V / 3.7V 锂电池 |
| 负载能力 | 800mA |
| 充电电流 | 500mA(最大) |
| 工作温度 | - 40°C 至 85°C |
| 存储温度 | -55°C 至 150°C |
| Grove 接口 | I2C 2 / UART 1 |
应用
- 可穿戴设备
- 快速原型制作
- Grove 模块测试
- 需要小尺寸的项目
支持的平台
| Arduino | Raspberry Pi |
|---|---|
|
|
入门指南
所需材料
| Seeed Studio Seeed Studio XIAO | Grove-多普勒雷达 | Seeed Studio Grove Base for XIAO |
|---|---|---|
|
|
|
| 立即购买 | 立即购买 | 立即购买 |



Grove-多普勒雷达的外部引脚描述

| 引脚编号 | 信号名称 | 引脚描述 |
|---|---|---|
| 1 | DIV_OUT | 来自BGT24LTR11的分频器输出 |
| 2 | GND | 接地 |
| 3 | VCC_5V_EXT | 外部+5.0V输入电源引脚(最大值=5.5V) |
| 4 | VTUNE | VCO频率调谐电压 |
| 5 | IFQ_HG | BGT24LTR11 Q通道模拟信号输出-第二增益级 |
| 6 | IFI_HG | BGT24LTR11 I通道模拟信号输出-第二增益级 |
| 7 | PWM_OUT | 带CCU4的外部用户可配置GPIO |
| 8 | OUT1 | 外部GPIO引脚(用户可配置) |
| 9 | OUT2 | 外部GPIO引脚(用户可配置) |
硬件连接

请轻柔地将USB线缆、多普勒雷达接口插入Seeed Studio XIAO扩展板接口,否则可能会损坏端口。
-
步骤 1. 使用Grove线缆将多普勒雷达插入Seeed Studio XIAO扩展板。
-
步骤 2. 通过USB线缆将Seeed Studio XIAO连接到PC。
-
步骤 3. 下载代码,请参考软件部分。
-
步骤 4. 运行代码,结果将显示在Arduino IDE的串口监视器屏幕上。
软件
如果这是您第一次使用Arduino,我们强烈建议您在开始之前查看Arduino入门指南。
-
步骤 1. 下载演示代码。
-
步骤 2. 复制整个Seeed_Arduino_DopplerRadar文件并将其粘贴到您的Arduino IDE库文件中。
-
步骤 3. 使用Arduino IDE打开BGT24LTR11_DETECTION_TARGET文件。
-
步骤 4. 上传演示代码。如果您不知道如何上传代码,请查看如何上传代码。
软件代码
#include "GBT24LTR11.h"
#ifdef __AVR__
#include <SoftwareSerial.h>
SoftwareSerial SSerial(2, 3); // RX, TX
#define COMSerial SSerial
#define ShowSerial Serial
GBT24LTR11<SoftwareSerial> GBT;
#endif
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define COMSerial Serial1
#define ShowSerial SerialUSB
GBT24LTR11<Uart> GBT;
#endif
#ifdef ARDUINO_ARCH_STM32F4
#define COMSerial Serial
#define ShowSerial SerialUSB
GBT24LTR11<HardwareSerial> GBT;
#endif
void setup() {
// put your setup code here, to run once:
ShowSerial.begin(9600);
COMSerial.begin(115200);
GBT.init(COMSerial);
while (!ShowSerial)
;
while (!COMSerial)
;
/*
MODE 0 -->detection target mode
MODE 1 -->I/Q ADC mode
*/
while (!GBT.setMode(0))
;
}
void loop() {
// put your main code here, to run repeatedly:
uint16_t state = 0;
ShowSerial.print("target speed:");
ShowSerial.println(GBT.getSpeed());
state = GBT.getTargetState();
//2 --> target approach
//1 --> target leave
//0 --> Not Found target
if (state == 2) {
ShowSerial.println("target approach");
} else if (state == 1) {
ShowSerial.println("target leave");
}
delay(200);
}
如果一切顺利,您可以前往串口监视器查看如下结果:

如果有物体接近雷达或经过,结果将如下所示:

传感器能够检测到的最小速度精度为52cm/s,相当于0.52m/s、3.6km/h和2.23mph。此外,函数getSpeed()返回的结果是52cm/s的倍数,并且相应地是绝对值。
原理图在线查看器
资源
- [ZIP] Seeed Studio Grove Base for XIAO 附件
- [ZIP] 演示代码库
- [PDF] Grove DopplerRadar (BGT24LTR11) 雷达模块通信协议 v1.1.pdf
- [PDF] ETA 3410 数据手册
项目
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。