Grove 基础套件(适用于 Raspberry Pi Pico)

Raspberry Pi Pico 是一款全新且广受欢迎的低成本、高性能微控制器开发板,那么如何将 Grove 传感器集成到它上面呢?Grove Shield 完美解决了这个问题。
Grove Shield for Pi Pico v1.0 是一款即插即用的 Raspberry Pi Pico 扩展板,集成了多种 Grove 接口,包括 2 个 I2C、3 个模拟、2 个 UART、3 个数字端口、SWD 调试接口和 SPI 引脚,以及 3.3V/5V 可选电源开关。它让你无需跳线和面包板,就能以简单快速的方式搭建原型和项目,从而探索 Pico 的无限可能。这块扩展板是可堆叠的附加板,作为 Pi Pico 与 Seeed Grove 系统之间的桥梁。
规格参数
| 参数 | 数值/范围 |
|---|---|
| 工作电压 | 3.3/5V |
| 工作温度 | -25℃ to +85℃ |
| 模拟端口 | 3 |
| 数字端口 | 3 |
| UART 端口 | 2 |
| I2C 端口 | 2 |
| 尺寸 | 56mm x56mm |
兼容开发板
Base Shield 已经过测试,并与 Pi Pico 完全兼容。
硬件概览

-
1-模拟端口:包含 3 个模拟端口,A0、A1、A2。
-
2-数字端口:包含 3 个数字端口,D16、D18、D20。
-
3-UART 端口:2 个 UART 端口。
-
4-I2C 端口:2 个 I2C 端口。
-
5-电源开关:5V/3.3V 可选电源开关。
-
6-SPI 端口:1 个 spi0 端口。
-
尺寸:56mm * 56mm
入门指南
项目 1:蜂鸣器发出不同的声音
所需材料
步骤 1. 准备以下物品:
| Pi Pico | Grove Shield for Pi Pico | Grove - Buzzer | Grove - Rotary Angle Sensor |
|---|---|---|---|
 |  |  |  |
| 立即购买 | 立即购买 | 立即购买 | 立即购买 |
步骤 2. 将 Grove Buzzer 连接到 Grove Shield 的 A1 端口。
步骤 3. 将 Grove Rotary Angle Sensor 连接到 Grove Shield 的 A0 端口。
步骤 4. 将 Grove Shield 插到 Pi Pico 上。
步骤 5. 使用 USB 线将 Pi Pico 连接到你的电脑。

软件设置
步骤 1. 下载 Thonny IDE:
Linux 开发环境:
你可以根据自己的系统,以不同方式安装 Thonny:
-
PC 二进制打包版本(Thonny + Python):
bash <(wget -O - https://thonny.org/installer-for-linux) -
使用 pip:
pip3 install thonny -
适用于 Debian、Raspbian、Ubuntu、Mint 及类似发行版:
sudo apt install thonny -
适用于 Fedora:
sudo dnf install thonny
步骤 2. 打开 Thonny,并将电脑连接到 Raspberry Pi Pico。在 Thonny 中,进入 Run 菜单,选择 Select Interpreter,然后在下拉列表中选择 "MicroPython (Raspberry Pi Pico)"。接着,选择你的 Pi Pico 所对应的 COM 端口。
注意:如果在解释器列表中没有看到 "MicroPython (Raspberry Pi Pico)",请确保你安装的是最新版本的 Thonny。


步骤 3. 如果 Raspberry Pi Pico 已连接并运行 MicroPython,Thonny 应该会自动连接到 REPL。现在,将以下代码复制到 Thonny IDE 中,然后点击绿色的 Run 按钮。
from machine import Pin, PWM, ADC
from time import sleep
adc = ADC(0) # ADC input (knob potentiometer) connected to A0
pwm = PWM(Pin(27)) # DAC output (buzzer) connected to A1
pwm.freq(10000)
while True:
val = adc.read_u16() # Read A0 port ADC value (65535~0)
# Drive the buzzer, turn off the buzzer when the ADC value is less than 300
if val > 300:
pwm.freq(int(val / 10))
pwm.duty_u16(10000)
else:
pwm.duty_u16(0)
print(val)
sleep(0.05)
现在,旋转 Grove Rotary Angle Sensor,你会在调节角度时听到蜂鸣器发出不同的声音。
项目 2:检测温度和湿度
- 选项 1: DHT11 and SSD1315
- Option 2: DHT20 and LCD1602
所需材料
步骤 1. 准备以下物品:
| Pi Pico | Grove Shield for Pi Pico | Grove OLED Display 0.96" (SSD1315) | Grove Temperature & Humidity Sensor (DHT11) |
|---|---|---|---|
| |  |  |
步骤 2. 将 Grove OLED Display 0.96" 连接到 Grove Shield 的 I2C1 端口。
步骤 3. 将 Grove Temperature Humidity Sensor (DHT11) 连接到 Grove Shield 的 D18 端口。
步骤 4. 将 Grove Shield 插到 Pi Pico 上。
步骤 5. 使用 USB 线将 Pi Pico 连接到你的电脑。
软件设置
请参考 Demo 1 的软件部分。
- 将以下代码复制到 Thonny IDE 中:
from ssd1306 import SSD1306_I2C
from dht11 import *
from machine import Pin, I2C
from time import sleep
i2c = I2C(1, scl=Pin(7), sda=Pin(6), freq=200000) # OLED connected to I2C1
oled = SSD1306_I2C(128, 64, i2c)
dht2 = DHT(18) # Temperature and humidity sensor connected to D18
while True:
temp, humid = dht2.readTempHumid() # Read temperature and humidity
'''I2C port test and OLED display test'''
oled.fill(0) # Clear the screen
oled.text("Temp: " + str(temp), 0, 0) # Display temperature on line 1
oled.text("Humid: " + str(humid), 0, 8) # Display humidity on line 2
oled.show()
sleep(0.5)
- 将以下所需的 Python 文件下载到本地电脑:
import time
from machine import Pin
MAXTIMINGS = 85
DHT11 = 11
DHT22 = 22
DHT21 = 21
AM2301 = 21
class DHT(object):
def __init__(self, data_pin,Type=DHT11):
self.Data_pin = data_pin
self.__pinData = Pin(data_pin, Pin.OUT)
self.firstreading = True
self.__pinData.value(1)
self._lastreadtime = 0
self.data=[0]*5
self.temp = 0
self.humid = 0
def read(self):
i=0
j=0
self.__pinData.value(1)
#time.sleep(0.25)
self.data[0] = self.data[1] = self.data[2] = self.data[3] = self.data[4] = 0
# now pull it low for ~20 milliseconds
pinData = Pin(self.Data_pin, Pin.OUT, None)
pinData.value(0)
time.sleep_ms(20)
pinData.value(1)
time.sleep_us(41)
pinData = Pin(self.Data_pin, Pin.IN)
DHT11_TIMEOUT = -1
time_cnt=0
while(0 ==pinData.value()):
time.sleep_us(5)
time_cnt = time_cnt+1
if(time_cnt > 16):
return
# DHT11 pulls the bus up at least 80 US in preparation for sending sensor data.
time_cnt=0
while(1 == pinData.value()):
time.sleep_us(5)
time_cnt = time_cnt+1
if(time_cnt > 16):
return
for j in range(5):
i = 0
result=0
PINC = 1
for i in range(8):
while(not (PINC & pinData.value())): # wait for 50us
pass
#print('wait 50us')
time.sleep_us(25)
if(PINC & pinData.value()):
result |=(1<<(7-i))
while(PINC & pinData.value()): # wait '1' finish
pass
#print('wait 1')
self.data[j] = result
pinData = Pin(self.Data_pin, Pin.OUT, None)
pinData.value(1)
dht11_check_sum = (self.data[0]+self.data[1]+self.data[2]+self.data[3]&0xff)
# check check_sum
if(self.data[4] is not dht11_check_sum):
print("DHT11 checksum error")
#print(self.data)
if ((j >= 4) and ( self.data[4] == dht11_check_sum)):
return True
return False
def readHumidity(self):
if (self.read()):
self.humid = float(self.data[0])
self.humid = self.humid + float(self.data[1]/10)
return self.humid
def readTemperature(self):
if (self.read()):
self.temp = float(self.data[2])
self.temp = self.temp + float(self.data[3]/10)
return self.temp
def readTempHumid(self):
if (self.read()):
self.temp = float(self.data[2])
self.temp = self.temp + float(self.data[3]/10)
self.humid = float(self.data[0])
self.humid = self.humid + float(self.data[1]/10)
return self.temp , self.humid
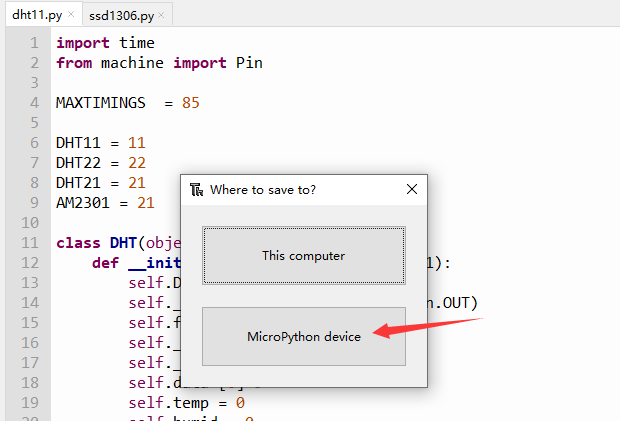
- 在 Thonny IDE 中打开 dht11.py,点击
File -> Save As -> MicroPython device,并将文件以 dht11.py 的名称保存在你的设备上。
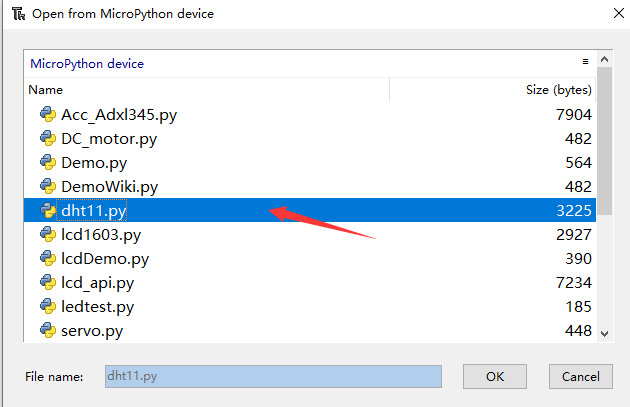
- 重复相同的步骤,将 ssd1306.py 保存到你的 MicroPython 设备。
运行项目
当两个文件都保存到你的 MicroPython 设备后,在 Thonny 中按下绿色的 Run 按钮运行示例代码。
现在你应该可以在 OLED 屏幕上看到温度和湿度的显示,类似于下图:

所需材料
步骤 1. 准备以下物品:
| Pi Pico | Grove Shield for Pi Pico | Grove 16x2 LCD (White on Blue) | Grove Temperature & Humidity Sensor V2.0 (DHT20) |
|---|---|---|---|
| |  |  |
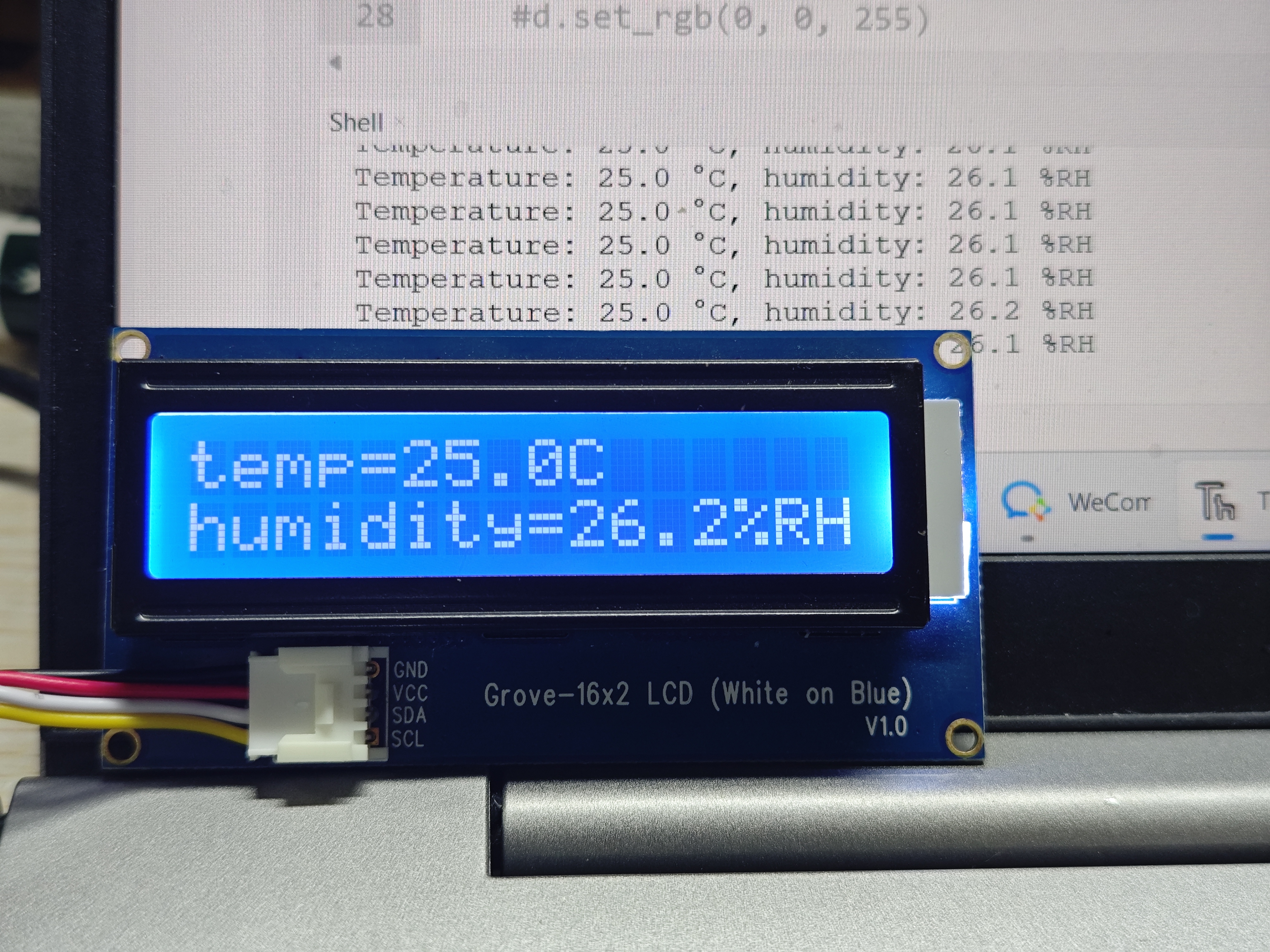
步骤 2. 将 Grove 16x2 LCD(白底蓝字)连接到 Grove Shield 的 I2C1 端口。
步骤 3. 将 Grove Temperature & Humidity Sensor V2.0 (DHT20) 连接到 Grove Shield 的 D18 端口。
步骤 4. 将 Grove Shield 插到 Pi Pico 上。
步骤 5. 使用 USB 线将 Pi Pico 连接到你的电脑。
软件设置
请参考示例 1 的软件部分。
- 将以下代码复制到 Thonny IDE 中:
from lcd1602 import LCD1602
from dht20 import DHT20
from machine import I2C,Pin
from time import sleep
i2c1 = I2C(1,scl=Pin(7), sda=Pin(6), freq=400000)
d = LCD1602(i2c1, 2, 16)
i2c0 = I2C(0, scl=Pin(9), sda=Pin(8),freq=400000)
dht20 = DHT20(0x38, i2c0)
while True:
measurements = dht20.measurements
temp_rounded = round(measurements['t'], 1)
humidity_rounded = round(measurements['rh'], 1)
print(f"Temperature: {temp_rounded} °C, humidity: {humidity_rounded} %RH")
d.home()
d.print('temp=')
d.print(str(temp_rounded))
d.print('C')
sleep(1)
d.setCursor(0, 1)
d.print('humidity=')
d.print(str(humidity_rounded))
d.print('%RH')
sleep(1)
-
将以下所需的 Python 文件下载到你的本地电脑:
-
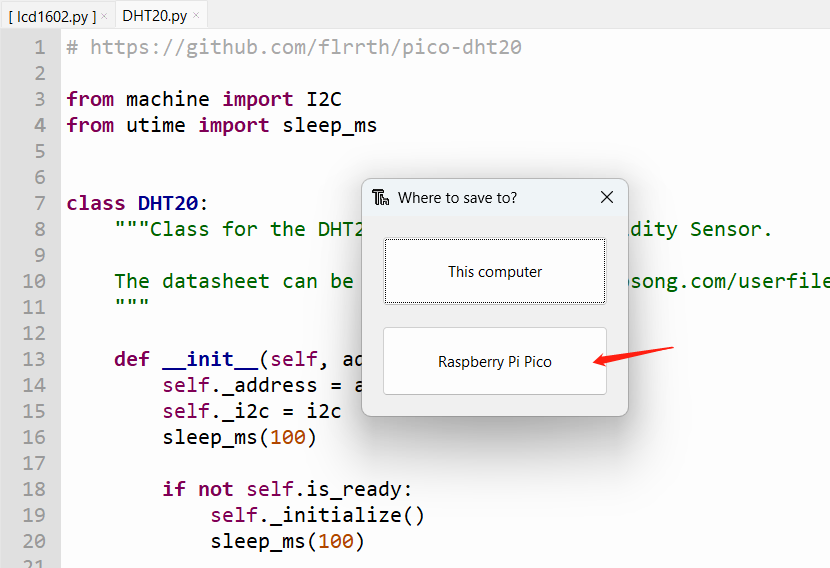
在 Thonny IDE 中打开 DHT20.py,点击
File -> Save As -> MicroPython device,并将文件以 DHT20.py 的名称保存在你的设备上。
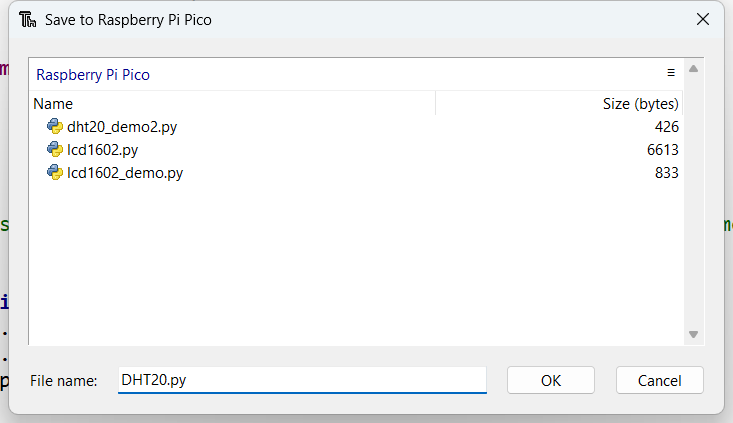
- 重复相同的步骤,将 lcd1602.py 保存到你的 MicroPython 设备。
运行项目
当两个文件都保存到你的 MicroPython 设备后,在 Thonny 中按下绿色的 Run 按钮运行示例代码。
现在你应该可以在 OLED 屏幕上看到温度和湿度的显示,类似于下图:
项目 3:控制 LED 和继电器
所需材料
- 步骤 1. 准备以下物品:
| Pi Pico | Grove Shield for Pi Pico | Grove-button | Grove-LED | Grove relay |
|---|---|---|---|---|
| |  |  |  |
| 立即获取 | 立即获取 | 立即获取 | 立即获取 | 立即获取 |
- 步骤 2. 将 Grove button 连接到 Base Shield 的数字引脚 18。
- 步骤 3. 将 Grove LED 连接到 Base Shield 的 D16 端口。
- 步骤 4. 将 Grove Relay 连接到 Base Shield 的 D20 端口。
- 步骤 5. 将 Grove Shield for Pi Pico 插到 Pi Pico 上。
- 步骤 6. 使用 USB 线将 Pi Pico 连接到电脑。
软件
请参考 demo1 的软件部分。
首先将下面的代码复制到 Thonny IDE 中。
from machine import Pin
button = Pin(18, Pin.IN, Pin.PULL_UP)# button connect to D18
button.irq(lambda pin: InterruptsButton(),Pin.IRQ_FALLING)#Set key interrupt
led = Pin(16, Pin.OUT)#led connect to D16
relay = Pin(20, Pin.OUT)
tmp = 0
'''Key interrupt function, change the state of the light when the key is pressed'''
def InterruptsButton(): #button input
global tmp
tmp = ~tmp
led.value(tmp)
relay.value(tmp)
while True:
pass
现在请点击绿色按钮来运行示例代码。
然后你可以按下 Grove button,就可以控制 LED 和继电器的打开和关闭。

项目 4:闪烁的颜色
所需材料
- 步骤 1. 准备以下物品:
| Pi Pico | Grove Shield for Pi Pico | RGB LED WS2813 mini |
|---|---|---|
| |  |
| 立即获取 | 立即获取 | 立即获取 |
- 步骤 2. 将 RGB LED WS2813 mini 连接到 Base Shield 的 18 号端口。
- 步骤 3. 将 Grove Shield for Pi Pico 插到 Pi Pico 上。
- 步骤 4. 使用 USB 线将 Pi Pico 连接到电脑。
软件
请参考 demo1 的软件部分。
首先将下面的代码复制到 Thonny IDE 中。
from ws2812 import WS2812
import time
BLACK = (0, 0, 0)
RED = (255, 0, 0)
YELLOW = (255, 150, 0)
GREEN = (0, 255, 0)
CYAN = (0, 255, 255)
BLUE = (0, 0, 255)
PURPLE = (180, 0, 255)
WHITE = (255, 255, 255)
COLORS = (BLACK, RED, YELLOW, GREEN, CYAN, BLUE, PURPLE, WHITE)
#WS2812(pin_num,led_count)
led = WS2812(18,30)
print("fills")
for color in COLORS:
led.pixels_fill(color)
led.pixels_show()
time.sleep(0.2)
print("chases")
for color in COLORS:
led.color_chase(color, 0.01)
print("rainbow")
led.rainbow_cycle(0)
然后请将 ws2812.py 下载到本地。使用 Thonny 打开 ws2812.py,点击 file->save as->MicroPython device。
在 File name 一栏输入 ws2812.py,点击 "ok",然后该文件会保存在 File->Open->MicroPython device 中。

在你已经将文件保存到 MicroPython 设备之后,现在请点击绿色按钮运行示例代码。 然后你就可以像下面这样看到 RGB LED WS2813 mini 闪烁出漂亮的颜色。

项目 5:检测声音和光线
所需材料
- 步骤 1. 准备以下物品:
| Pi Pico | Grove Shield for Pi Pico | grove sound sensor | Grove light sensor | Grove-16x2 LCD |
|---|---|---|---|---|
| |  |  |  |
| 立即获取 | 立即获取 | 立即获取 | 立即获取 | 立即获取 |
- 步骤 2. 将 Grove sound sensor 连接到 Base Shield 的模拟口 0。
- 步骤 3. 将 Grove light 连接到 Base Shield 的 A1 口。
- 步骤 4. 将 Grove 16X2 lcd 连接到 Base Shield 的 I2C1 口。
- 步骤 5. 将 Grove Shield for Pi Pico 插到 Pi Pico 上。
- 步骤 6. 通过 USB 线将 Pi Pico 连接到电脑。
软件
请参考 demo1 的软件部分。
首先将下面的代码复制到 Thonny IDE 中。
#from lcd1602 import LCD1602_RGB #LCD1602 RGB grove
from lcd1602 import LCD1602
from machine import I2C,Pin,ADC
from time import sleep
i2c = I2C(1,scl=Pin(7), sda=Pin(6), freq=400000)
d = LCD1602(i2c, 2, 16)
#d = LCD1602_RGB.display(i2c, 2, 16)
#d.set_rgb(255, 0, 0)
sleep(1)
light = ADC(0)
sound = ADC(1)
while True:
lightVal = light.read_u16()
soundVal = sound.read_u16()
d.home()
d.print('lightvalue=')
d.print(str(lightVal))
#d.set_rgb(0, 255, 0)
sleep(1)
d.setCursor(0, 1)
d.print('soundvalue=')
d.print(str(soundVal))
#d.set_rgb(0, 0, 255)
sleep(1)
然后请将 LCD1602.py 下载到本地。使用 Thonny 打开 LCD1602.py,点击 file->save as->MicroPython device。
在 File name 一栏输入 LCD1602.py,点击 "ok",然后该文件会保存在 File->Open->MicroPython device 中。
在本示例中,我们使用的 LCD1602 版本是单色背光版本,如果你需要控制全彩背光版本的 LCD1602,请查看此库文件中的函数以了解如何使用它。

在你已经将文件保存到 MicroPython 设备之后,现在请点击绿色按钮运行示例代码。 然后你就可以像下面这样获取声音传感器和光线传感器的数据。

项目 6:检测运动
所需材料
- 步骤 1. 准备以下物品:
| Pi Pico | Grove Shield for Pi Pico | grove servo | Grove Mini Fan | Grove mini pir motion sensor |
|---|---|---|---|---|
| |  |  |  |
| 立即获取 | 立即获取 | 立即获取 | 立即获取 | 立即获取 |
- 步骤 2. 将 Grove servo 连接到 Base Shield 的模拟口 1。
- 步骤 3. 将 Grove Mini fan 连接到 Base Shield 的 D16 口。
- 步骤 4. 将 Grove Mini pir motion sensor 连接到 Base Shield 的 D18 口。
- 步骤 5. 将 Grove Shield for Pi Pico 插到 Pi Pico 上。
- 步骤 6. 通过 USB 线将 Pi Pico 连接到电脑。
软件
请参考 demo1 的软件部分。
首先将下面的代码复制到 Thonny IDE 中。
from machine import Pin,ADC,PWM
from time import sleep
import utime
miniFun = Pin(16, Pin.OUT)
miniPir = Pin(18, Pin.IN)
pwm_Servo=PWM(Pin(27))
pwm_Servo.freq(500)
Servo_Val =0
while True:
if miniPir.value() == 1 :
miniFun.value(1)
while Servo_Val<65535:
Servo_Val=Servo_Val+50
utime.sleep_ms(1)
pwm_Servo.duty_u16(Servo_Val)
while Servo_Val>0:
Servo_Val=Servo_Val-50
utime.sleep_ms(1)
pwm_Servo.duty_u16(Servo_Val)
else :
miniFun.value(0)
pwm_Servo.duty_u16(0)
现在请点击绿色按钮运行示例代码。 然后当你的手从 pir 传感器前方划过时,你就可以像下面这样让 grove mini fan 和 grove servo 运行起来。

原理图在线查看器
资源
- [PDF] Pico python SDK
- [PDF] SCH
- [Eagle] PCB&SCH
课程资源
- [ZIP] 基于 MicroPython 的 Raspberry Pi Pico 初学者指南
- [ZIP] 代码
- [ZIP] 库文件
技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,以确保你在使用我们产品时的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。