Grove - 热成像摄像头 IR-Array MLX90641
这款红外热成像摄像头搭载了一个16x12阵列的热传感器 (MLX90641),可以远距离检测物体温度,中心区域精度为±1℃,平均精度为±1.5℃。为了便于获取热成像图像,采用I2C协议从摄像头获取低分辨率图像。该摄像头的FOV(视场角)为110°x75°,温度测量范围为-40℃至300℃。为了便于获取热成像图像,使用I2C协议从摄像头获取低分辨率图像。
而Grove - 热成像摄像头是一款热传感器 (MLX90640),搭载32x24阵列的热传感器,可以在数英尺外检测物体温度,精度为±1.5℃,能够呈现动态热成像图像并检测-40℃~300℃范围内的环境温度。该摄像头有窄角/广角版本,FOV(视场角)分别为55°x35°/110°x75°。为了便于获取热成像图像,使用I2C协议从摄像头获取低分辨率图像。
版本
| 版本 | 发布日期 | 订购 |
|---|---|---|
| Grove - 热成像摄像头 / IR Array MLX90641 110度 [新品] | 2020年6月3日 | 购买 |
| Grove - 热成像摄像头 / IR Array MLX90640 110度 | 2019年11月12日 | 购买 |
本wiki适用于热成像摄像头IR Array MLX90641和MLX90640两种类型。
特性
- 紧凑尺寸16x12像素红外热传感器阵列(MLX90641),32x24阵列像素红外热传感器阵列(MLX90640)
- 高FOV(视场角)110°x75°,可捕获更大区域
- 宽温度测量范围(-40℃~300℃)
- I2C Grove接口,便于与MCU通信
- 完全校准的红外阵列,设置方便
规格参数
| 项目 | Grove - 热成像摄像头 - MLX90640 | Grove - 热成像摄像头 - MLX90641 |
|---|---|---|
| 热传感器 | 32X24阵列 MLX90640 | 16x12阵列 MLX90641 |
| 工作电压 | 3.3V - 5V | 3.3V - 5V |
| 电流消耗 | ~18mA | ~18mA |
| FOV(视场角) | 110°x75° | 110°x75° |
| 温度测量范围 | -40°C - 300°C | -40°C - 300°C |
| 温度分辨率 | ± 1.5°C | ± 1.5°C(中心区域±1℃) |
| 刷新率 | 0.5Hz - 64Hz | 0.5Hz - 64Hz |
| 接口 | I2C Grove接口 | I2C Grove接口 |
| I2C地址 | 0x33 | 0x33 |
支持的平台
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
入门指南
通过 Wio Terminal 入门
所需材料
| Wio Terminal | Grove - 热成像摄像头 / 红外阵列 MLX90641 110度 |
|---|---|
 |  |
| 立即购买 | 立即购买 |
硬件连接

步骤 1. 通过 Grove 线缆将 Grove - 热成像摄像头连接到 Wio Terminal,同时通过 USB 线缆将 Wio Terminal 连接到 PC。
步骤 2. 下载库文件,复制整个 Seeed_Arduino_MLX9064x 文件并粘贴到您的 Arduino IDE 库文件夹中。
如果这是您第一次使用 Wio Terminal 并且不确定应该插入 Wio Terminal 的哪个接口,请参考 Wio Terminal 入门指南。
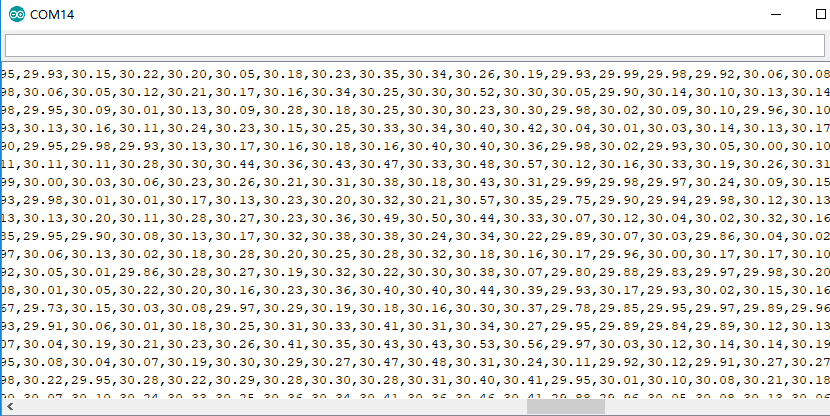
步骤 3. 将下面的软件代码 1 复制到您的 Arduino IDE 中并上传,以通过串口显示可视化格式。
可视化格式的输出结果
软件代码 1
/*
输出所有像素的温度读数,供 Processing 可视化工具读取
*/
#include <Wire.h>
#define USE_MLX90641
#ifndef USE_MLX90641
#include "MLX90640_API.h"
#else
#include "MLX90641_API.h"
#endif
#include "MLX9064X_I2C_Driver.h"
#if defined(ARDUINO_ARCH_AVR)
#define debug Serial
#elif defined(ARDUINO_ARCH_SAMD) || defined(ARDUINO_ARCH_SAM)
#define debug Serial
#else
#define debug Serial
#endif
#ifdef USE_MLX90641
const byte MLX90641_address = 0x33; //MLX90641 的默认 7 位未移位地址
#define TA_SHIFT 8 //MLX90641 在开放空气中的默认移位
uint16_t eeMLX90641[832];
float MLX90641To[192];
uint16_t MLX90641Frame[242];
paramsMLX90641 MLX90641;
int errorno = 0;
#else
const byte MLX90640_address = 0x33; //MLX90640 的默认 7 位未移位地址
#define TA_SHIFT 8 //MLX90640 在开放空气中的默认移位
float mlx90640To[768];
paramsMLX90640 mlx90640;
#endif
void setup() {
Wire.begin();
Wire.setClock(400000); //将 I2C 时钟速度提高到 400kHz
debug.begin(115200); //尽可能快的调试速度
while (!debug); //等待用户打开终端
//debug.println("MLX90640 IR Array Example");
#ifndef USE_MLX90641
if (isConnected() == false) {
debug.println("在默认 I2C 地址未检测到 MLX9064x。请检查接线。程序冻结。");
while (1);
}
//获取设备参数 - 我们只需要执行一次
int status;
uint16_t eeMLX90640[832];
status = MLX90640_DumpEE(MLX90640_address, eeMLX90640);
if (status != 0) {
debug.println("加载系统参数失败");
}
status = MLX90640_ExtractParameters(eeMLX90640, &mlx90640);
if (status != 0) {
debug.println("参数提取失败");
}
//参数提取完成后,我们可以释放 eeMLX90640 数组
//MLX90640_SetRefreshRate(MLX90640_address, 0x02); //设置速率为 2Hz
MLX90640_SetRefreshRate(MLX90640_address, 0x03); //设置速率为 4Hz
//MLX90640_SetRefreshRate(MLX90640_address, 0x07); //设置速率为 64Hz
#else
if (isConnected() == false) {
debug.println("在默认 I2C 地址未检测到 MLX90641。请检查接线。程序冻结。");
while (1);
}
//获取设备参数 - 我们只需要执行一次
int status;
status = MLX90641_DumpEE(MLX90641_address, eeMLX90641);
errorno = status;//MLX90641_CheckEEPROMValid(eeMLX90641);//eeMLX90641[10] & 0x0040;//
if (status != 0) {
debug.println("加载系统参数失败");
while(1);
}
status = MLX90641_ExtractParameters(eeMLX90641, &MLX90641);
//errorno = status;
if (status != 0) {
debug.println("参数提取失败");
while(1);
}
//参数提取完成后,我们可以释放 eeMLX90641 数组
//MLX90641_SetRefreshRate(MLX90641_address, 0x02); //设置速率为 2Hz
MLX90641_SetRefreshRate(MLX90641_address, 0x03); //设置速率为 4Hz
//MLX90641_SetRefreshRate(MLX90641_address, 0x07); //设置速率为 64Hz
#endif
}
void loop() {
#ifndef USE_MLX90641
long startTime = millis();
for (byte x = 0 ; x < 2 ; x++) {
uint16_t mlx90640Frame[834];
int status = MLX90640_GetFrameData(MLX90640_address, mlx90640Frame);
float vdd = MLX90640_GetVdd(mlx90640Frame, &mlx90640);
float Ta = MLX90640_GetTa(mlx90640Frame, &mlx90640);
float tr = Ta - TA_SHIFT; //基于传感器环境温度的反射温度
float emissivity = 0.95;
MLX90640_CalculateTo(mlx90640Frame, &mlx90640, emissivity, tr, mlx90640To);
}
long stopTime = millis();
for (int x = 0 ; x < 768 ; x++) {
//if(x % 8 == 0) debug.println();
debug.print(mlx90640To[x], 2);
debug.print(",");
}
debug.println("");
#else
long startTime = millis();
for (byte x = 0 ; x < 2 ; x++) {
int status = MLX90641_GetFrameData(MLX90641_address, MLX90641Frame);
float vdd = MLX90641_GetVdd(MLX90641Frame, &MLX90641);
float Ta = MLX90641_GetTa(MLX90641Frame, &MLX90641);
float tr = Ta - TA_SHIFT; //基于传感器环境温度的反射温度
float emissivity = 0.95;
MLX90641_CalculateTo(MLX90641Frame, &MLX90641, emissivity, tr, MLX90641To);
}
long stopTime = millis();
/*
debug.print("vdd=");
debug.print(vdd,2);
debug.print(",Ta=");
debug.print(Ta,2);
debug.print(",errorno=");
debug.print(errorno,DEC);
for (int x = 0 ; x < 64 ; x++) {
debug.print(MLX90641Frame[x], HEX);
debug.print(",");
}
delay(1000);
*/
for (int x = 0 ; x < 192 ; x++) {
debug.print(MLX90641To[x], 2);
debug.print(",");
}
debug.println("");
#endif
}
//如果在 I2C 总线上检测到 MLX90640,则返回 true
boolean isConnected() {
#ifndef USE_MLX90641
Wire.beginTransmission((uint8_t)MLX90640_address);
#else
Wire.beginTransmission((uint8_t)MLX90641_address);
#endif
if (Wire.endTransmission() != 0) {
return (false); //传感器未应答
}
return (true);
}
将上面的软件代码1上传到您的Arduino IDE中并打开串口,您将看到如下可视化格式的输出结果:
在Wio Terminal上的可视化输出结果
步骤4. 将下面的软件代码2上传到您的Arduino IDE中,用于在Wio Terminal上显示可视化效果。
软件代码2
#include <Wire.h>
#include "MLX90641_API.h"
#include "MLX9064X_I2C_Driver.h"
#include <TFT_eSPI.h> // 包含图形库(包括精灵函数)
const byte MLX90641_address = 0x33; //MLX90641的默认7位未移位地址
#define TA_SHIFT 12 //MLX90641在开放空气中的默认移位
#define debug Serial
uint16_t eeMLX90641[832];
float MLX90641To[192];
uint16_t MLX90641Frame[242];
paramsMLX90641 MLX90641;
int errorno = 0;
TFT_eSPI tft = TFT_eSPI();
TFT_eSprite Display = TFT_eSprite(&tft); // 创建精灵对象"img",指向"tft"对象
// 指针被pushSprite()用来将其推送到TFT上
unsigned long CurTime;
uint16_t TheColor;
// 从一些初始颜色开始
uint16_t MinTemp = 25;
uint16_t MaxTemp = 38;
// 插值颜色的变量
byte red, green, blue;
// 行/列插值的变量
byte i, j, k, row, col, incr;
float intPoint, val, a, b, c, d, ii;
byte aLow, aHigh;
// 显示"像素"的大小
byte BoxWidth = 3;
byte BoxHeight = 3;
int x, y;
char buf[20];
// 切换显示网格的变量
int ShowGrid = -1;
// 插值数组的数组
float HDTemp[6400];
void setup() {
Wire.begin();
Wire.setClock(2000000); //将I2C时钟速度增加到2M
debug.begin(115200); //尽可能快的调试
// 启动显示并将背景设置为黑色
if (isConnected() == false) {
debug.println("在默认I2C地址未检测到MLX90641。请检查接线。冻结。");
while (1);
}
//获取设备参数 - 我们只需要做一次
int status;
status = MLX90641_DumpEE(MLX90641_address, eeMLX90641);
errorno = status;//MLX90641_CheckEEPROMValid(eeMLX90641);//eeMLX90641[10] & 0x0040;//
if (status != 0) {
debug.println("加载系统参数失败");
while(1);
}
status = MLX90641_ExtractParameters(eeMLX90641, &MLX90641);
//errorno = status;
if (status != 0) {
debug.println("参数提取失败");
while(1);
}
//一旦提取参数,我们可以释放eeMLX90641数组
MLX90641_SetRefreshRate(MLX90641_address, 0x05); //将速率设置为16Hz
tft.begin();
tft.setRotation(3);
tft.fillScreen(TFT_BLACK);
Display.createSprite(TFT_HEIGHT, TFT_WIDTH);
Display.fillSprite(TFT_BLACK);
// 获取颜色插值例程的截止点
// 注意当温度刻度改变时调用此函数
Getabcd();
// 绘制与传感器最大值和最小值匹配的刻度图例
DrawLegend();
}
void loop() {
// 为温度区域绘制一个大的白色边框
Display.fillRect(10, 10, 220, 220, TFT_WHITE);
for (byte x = 0 ; x < 2 ; x++) {
int status = MLX90641_GetFrameData(MLX90641_address, MLX90641Frame);
float vdd = MLX90641_GetVdd(MLX90641Frame, &MLX90641);
float Ta = MLX90641_GetTa(MLX90641Frame, &MLX90641);
float tr = Ta - TA_SHIFT; //基于传感器环境温度的反射温度
float emissivity = 0.95;
MLX90641_CalculateTo(MLX90641Frame, &MLX90641, emissivity, tr, MLX90641To);
}
interpolate_image(MLX90641To,12,16,HDTemp,80,80);
//显示80 x 80数组
DisplayGradient();
//屏幕中央的十字准线
Display.drawCircle(115, 115, 5, TFT_WHITE);
Display.drawFastVLine(115, 105, 20, TFT_WHITE);
Display.drawFastHLine(105, 115, 20, TFT_WHITE);
//显示屏幕中央的温度
//将精灵推送到屏幕
Display.pushSprite(0, 0);
tft.setRotation(3);
tft.setTextColor(TFT_WHITE);
tft.drawFloat(HDTemp[35 * 80 + 35], 2, 90, 20);
}
//如果在I2C总线上检测到MLX90640,则返回true
boolean isConnected() {
Wire.beginTransmission((uint8_t)MLX90641_address);
if (Wire.endTransmission() != 0) {
return (false); //传感器未应答
}
return (true);
}
// 显示结果的函数
void DisplayGradient() {
tft.setRotation(4);
// 遍历70行
for (row = 0; row < 70; row ++) {
// 绘制无闪烁网格的快速方法--只需将每10个MLX90641To设为2x2而不是3x3
// 在网格后绘制线条会闪烁太多
if (ShowGrid < 0) {
BoxWidth = 3;
}
else {
if ((row % 10 == 9) ) {
BoxWidth = 2;
}
else {
BoxWidth = 3;
}
}
// 然后遍历每70列
for (col = 0; col < 70; col++) {
// 绘制无闪烁网格的快速方法--只需将每10个MLX90641To设为2x2而不是3x3
if (ShowGrid < 0) {
BoxHeight = 3;
}
else {
if ( (col % 10 == 9)) {
BoxHeight = 2;
}
else {
BoxHeight = 3;
}
}
// 最后我们可以绘制每个70 x 70点,注意调用获取插值颜色
Display.fillRect((row * 3) + 15, (col * 3) + 15, BoxWidth, BoxHeight, GetColor(HDTemp[row * 80 + col]));
}
}
}
// 我的快速而有效的颜色插值例程
uint16_t GetColor(float val) {
/*
传入值并计算R G B
有几种已发布的方法来做这件事,我基本上绘制了R G B图并开发了简单的线性方程
再次,5-6-5颜色显示不需要精确的温度到R G B颜色计算
基于以下方程
http://web-tech.ga-usa.com/2012/05/creating-a-custom-hot-to-cold-temperature-color-gradient-for-use-with-rrdtool/index.html
*/
red = constrain(255.0 / (c - b) * val - ((b * 255.0) / (c - b)), 0, 255);
if ((val > MinTemp) & (val < a)) {
green = constrain(255.0 / (a - MinTemp) * val - (255.0 * MinTemp) / (a - MinTemp), 0, 255);
}
else if ((val >= a) & (val <= c)) {
green = 255;
}
else if (val > c) {
green = constrain(255.0 / (c - d) * val - (d * 255.0) / (c - d), 0, 255);
}
else if ((val > d) | (val < a)) {
green = 0;
}
if (val <= b) {
blue = constrain(255.0 / (a - b) * val - (255.0 * b) / (a - b), 0, 255);
}
else if ((val > b) & (val <= d)) {
blue = 0;
}
else if (val > d) {
blue = constrain(240.0 / (MaxTemp - d) * val - (d * 240.0) / (MaxTemp - d), 0, 240);
}
// 使用显示器的颜色映射函数获取5-6-5颜色调色板(R=5位,G=6位,B=5位)
return Display.color565(red, green, blue);
}
// 获取温度与RGB图中截止点的函数
void Getabcd() {
a = MinTemp + (MaxTemp - MinTemp) * 0.2121;
b = MinTemp + (MaxTemp - MinTemp) * 0.3182;
c = MinTemp + (MaxTemp - MinTemp) * 0.4242;
d = MinTemp + (MaxTemp - MinTemp) * 0.8182;
}
float get_point(float *p, uint8_t rows, uint8_t cols, int8_t x, int8_t y)
{
if (x < 0)
{
x = 0;
}
if (y < 0)
{
y = 0;
}
if (x >= cols)
{
x = cols - 1;
}
if (y >= rows)
{
y = rows - 1;
}
return p[y * cols + x];
}
void set_point(float *p, uint8_t rows, uint8_t cols, int8_t x, int8_t y, float f)
{
if ((x < 0) || (x >= cols))
{
return;
}
if ((y < 0) || (y >= rows))
{
return;
}
p[y * cols + x] = f;
}
// src是一个网格src_rows * src_cols
// dest是一个预分配的网格,dest_rows*dest_cols
void interpolate_image(float *src, uint8_t src_rows, uint8_t src_cols,
float *dest, uint8_t dest_rows, uint8_t dest_cols)
{
float mu_x = (src_cols - 1.0) / (dest_cols - 1.0);
float mu_y = (src_rows - 1.0) / (dest_rows - 1.0);
float adj_2d[16]; // 存储相邻点的矩阵
for (uint8_t y_idx = 0; y_idx < dest_rows; y_idx++)
{
for (uint8_t x_idx = 0; x_idx < dest_cols; x_idx++)
{
float x = x_idx * mu_x;
float y = y_idx * mu_y;
get_adjacents_2d(src, adj_2d, src_rows, src_cols, x, y);
float frac_x = x - (int)x; // 我们只需要点之间的~增量~
float frac_y = y - (int)y; // 我们只需要点之间的~增量~
float out = bicubicInterpolate(adj_2d, frac_x, frac_y);
set_point(dest, dest_rows, dest_cols, x_idx, y_idx, out);
}
}
}
// p是4个点的列表,左边2个,右边2个
float cubicInterpolate(float p[], float x)
{
float r = p[1] + (0.5 * x * (p[2] - p[0] + x * (2.0 * p[0] - 5.0 * p[1] + 4.0 * p[2] - p[3] + x * (3.0 * (p[1] - p[2]) + p[3] - p[0]))));
return r;
}
// p是一个16点4x4数组,包含左/右/上/下的2行2列
float bicubicInterpolate(float p[], float x, float y)
{
float arr[4] = {0, 0, 0, 0};
arr[0] = cubicInterpolate(p + 0, x);
arr[1] = cubicInterpolate(p + 4, x);
arr[2] = cubicInterpolate(p + 8, x);
arr[3] = cubicInterpolate(p + 12, x);
return cubicInterpolate(arr, y);
}
// src是rows*cols,dest是已分配的4点数组!
void get_adjacents_1d(float *src, float *dest, uint8_t rows, uint8_t cols, int8_t x, int8_t y)
{
// 选择左边的两个项目
dest[0] = get_point(src, rows, cols, x - 1, y);
dest[1] = get_point(src, rows, cols, x, y);
// 选择右边的两个项目
dest[2] = get_point(src, rows, cols, x + 1, y);
dest[3] = get_point(src, rows, cols, x + 2, y);
}
// src是rows*cols,dest是已分配的16点数组!
void get_adjacents_2d(float *src, float *dest, uint8_t rows, uint8_t cols, int8_t x, int8_t y)
{
float arr[4];
for (int8_t delta_y = -1; delta_y < 3; delta_y++)
{ // -1, 0, 1, 2
float *row = dest + 4 * (delta_y + 1); // 索引到每个4的块中
for (int8_t delta_x = -1; delta_x < 3; delta_x++)
{ // -1, 0, 1, 2
row[delta_x + 1] = get_point(src, rows, cols, x + delta_x, y + delta_y);
}
}
}
// 绘制图例的函数
void DrawLegend() {
//带有最大值和最小值文本的颜色图例
j = 0;
float inc = (MaxTemp - MinTemp ) / 160.0;
for (ii = MinTemp; ii < MaxTemp; ii += inc) {
tft.drawFastHLine(260, 200 - j++, 30, GetColor(ii));
}
tft.setTextSize(2);
tft.setCursor(245, 20);
tft.setTextColor(TFT_WHITE, TFT_BLACK);
sprintf(buf, "%2d/%2d", MaxTemp, (int) (MaxTemp * 1.12) + 32);
tft.print(buf);
tft.setTextSize(2);
tft.setCursor(245, 210);
tft.setTextColor(TFT_WHITE, TFT_BLACK);
sprintf(buf, "%2d/%2d", MinTemp, (int) (MinTemp * 1.12) + 32);
tft.print(buf);
}
如果一切顺利,可视化结果将显示在 Wio Terminal 的屏幕上
通过 Raspberry Pi 入门
硬件
所需材料
| Raspberry Pi 4 | Grove Base Hat for Raspberry Pi | Grove - Thermal Imaging Camera / IR Array MLX90641 110 degree |
|---|---|---|
 |  | |
| 立即购买 | 立即购买 | 立即购买 |
硬件连接
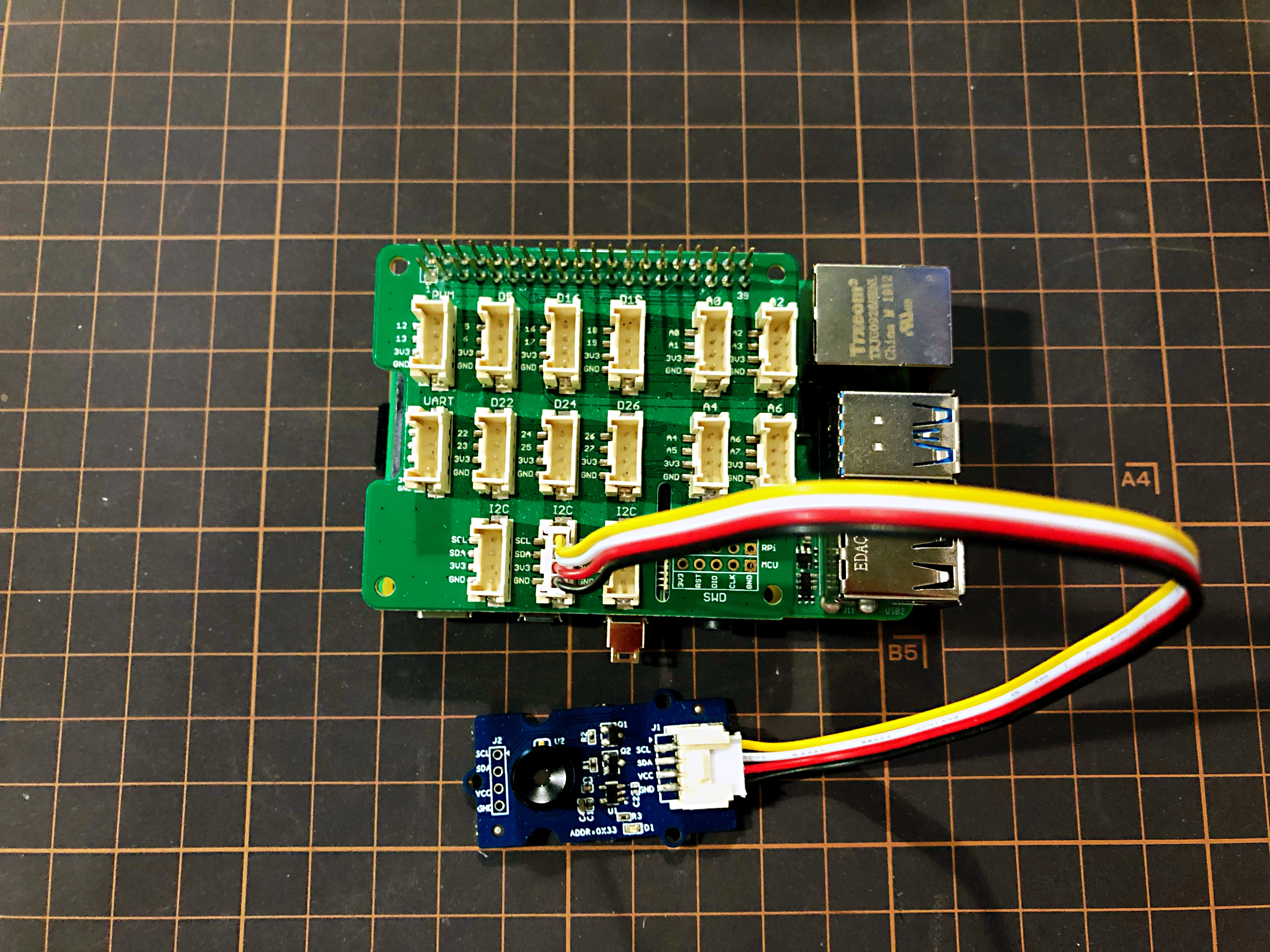
- 步骤 1 将 Grove - Thermal Imaging Camera 连接到两个 I2C 端口中的一个。
- 步骤 2 将 Raspberry Pi 4 插入 Grove Base Hat for Raspberry Pi。
- 步骤 3 通过 HDMI 线缆将 Raspberry Pi 连接到显示器,并通过 USB type-C 为 Raspberry Pi 4 供电。
软件
Raspberry Pi 4 支持 Python,因此如果您按照以下步骤操作,项目演示可以轻松地从 Raspberry Pi 4 显示器上显示。
- 步骤 1 通过以下命令安装 grove.py
pip3 install Seeed-grove.py
- 步骤 2 使用以下命令安装 MLX90641 驱动程序。 Python 环境(如果您没有 Raspberry Pi 的权限):
pip3 install seeed-python-mlx9064x
升级到最新驱动程序:
pip3 install --upgrade seeed-python-mlx9064x
- 步骤 3 检查 Raspberry Pi 对应的 i2c 编号:
ls /dev/i2c*
您可能会得到如下结果:
/dev/i2c-1
-
步骤 4 通过 git clone 命令下载 MLX90641 Library。
-
步骤 5 使用以下命令运行 BasicReadings.py 文件:
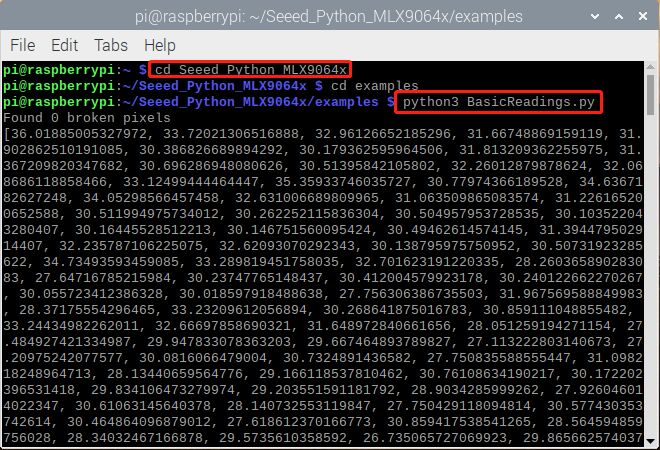
如果一切顺利,结果将如上所示。
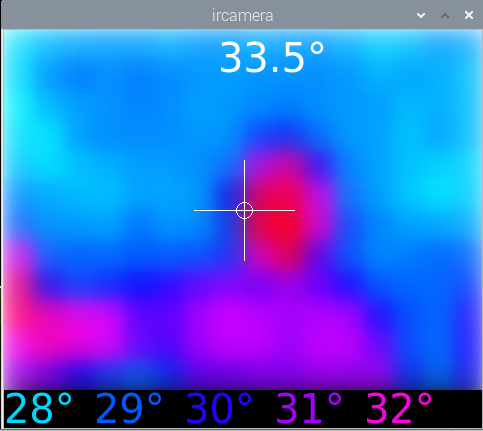
Raspberry Pi 上已发布升级版的 UI 结果,如下所示:
- 步骤 1 安装 pyqt5:
sudo apt-get install python3-pyqt5 -y
- 步骤 2 从 PyPI 安装:
sudo pip3 install seeed_python_ircamera
- 步骤 3 设置最大 i2c 速度然后重启:
sudo sh -c "echo dtparam=i2c_arm=on,i2c_arm_baudrate=400000 >> /boot/config.txt"
sudo reboot
- 步骤 4 在终端中输入以下命令:
sudo ircamera I2C MLX90641
如果一切顺利,结果将如下所示。
资源
- [PDF] MLX90641数据手册
- [ZIP] MLX90641可视化工具
技术支持与产品讨论
请将任何技术问题提交到我们的论坛。
可升级为工业传感器
通过SenseCAP S2110控制器和S2100数据记录器,您可以轻松将Grove转换为LoRaWAN®传感器。Seeed不仅帮助您进行原型设计,还为您提供了使用SenseCAP系列坚固工业传感器扩展项目的可能性。
IP66外壳、蓝牙配置、与全球LoRaWAN®网络的兼容性、内置19Ah电池以及APP的强大支持,使SenseCAP S210x成为工业应用的最佳选择。该系列包括土壤湿度、空气温湿度、光照强度、CO2、EC传感器以及8合1气象站。为您下一个成功的工业项目尝试最新的SenseCAP S210x。
