Grove - 飞行时间距离传感器 VL53L0X

Grove - 飞行时间距离传感器-VL53L0X 是一款基于 VL53L0X 的高速、高精度、长距离距离传感器。
VL53L0X 是新一代飞行时间 (ToF) 激光测距模块,采用目前市场上最小的封装,无论目标反射率如何,都能提供精确的距离测量,这与传统技术不同。它可以测量高达 2m 的绝对距离,在测距性能水平上树立了新的基准,为各种新应用打开了大门。
VL53L0X 集成了领先的 SPAD 阵列(单光子雪崩二极管)并嵌入了 ST 的第二代 FlightSense™ 专利技术。
VL53L0X 的 940 nm VCSEL 发射器(垂直腔面发射激光器)对人眼完全不可见,结合内部物理红外滤光片,它能够实现更长的测距距离、对环境光的更高抗扰性,以及对盖板玻璃光学串扰的更好鲁棒性。

特性
-
完全集成的微型模块
- 940 nm 激光 VCSEL
- VCSEL 驱动器
- 带有先进嵌入式微控制器的测距传感器
-
快速、精确的距离测量
- 测量高达 2 m 的绝对距离
- 报告的距离与目标反射率无关
- 先进的嵌入式光学串扰补偿,简化盖板玻璃选择
-
眼部安全
- 符合最新标准 IEC 60825-1:2014 - 第 3 版的 1 类激光设备
-
易于集成
- 单个可回流焊元件
- 无需额外光学器件
- 单电源供电
- 用于设备控制和数据传输的 I2C 接口
- Xshutdown(复位)和中断 GPIO
- 可编程 I2C 地址
规格参数
| 特性 | 详细信息 |
|---|---|
| 工作电压 | 3.3V/5V |
| 工作温度 | -20℃ - 70℃ |
| 推荐测量距离 | 30mm-1000mm |
| 分辨率 | 1mm |
| 红外发射器 | 940 nm |
| 总线速率 | 高达 400 kHz(FAST 模式)串行总线 |
| IIC 地址 | 0x29 |
应用
- 个人电脑/笔记本电脑/平板电脑和物联网的用户检测(节能)
- 机器人技术(障碍物检测)
- 白色家电(自动水龙头、皂液器等中的手部检测)
- 一维手势识别
- 激光辅助自动对焦。增强和加速相机自动对焦系统性能,特别是在困难场景(低光照、低对比度)或快速移动视频模式下。
支持的平台
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
上述提到的支持平台是/是该模块软件或理论兼容性的指示。在大多数情况下,我们只为 Arduino 平台提供软件库或代码示例。不可能为所有可能的 MCU 平台提供软件库/演示代码。因此,用户必须编写自己的软件库。
入门指南
如果这是您第一次使用Arduino,我们强烈建议您在开始之前先查看Arduino入门指南。
与Arduino一起使用
硬件
所需材料
| Seeeduino V4.2 | Base Shield | Grove - 飞行时间距离传感器 |
|---|---|---|
 |  |  |
| 立即购买 | 立即购买 | 立即购买 |
-
步骤1. 将Grove - 飞行时间距离传感器连接到Grove-Base Shield的IIC端口。
-
步骤2. 将Grove - Base Shield插入Seeeduino。
-
步骤3. 通过USB线缆将Seeeduino连接到PC。

如果我们没有Grove Base Shield,我们也可以直接将Grove - 温湿度传感器Pro连接到Seeeduino,如下所示。
| Seeeduino | Grove - 飞行时间距离传感器 |
|---|---|
| 5V | 红色 |
| GND | 黑色 |
| SDA | 白色 |
| SCL | 黄色 |
软件
-
步骤1. 从Github下载VL53L0X库。
-
步骤2. 将
Grove-Ranging-sensor-VL53L0X-master.zip文件解压到Arduino库文件夹中。
例如,我将这个库下载到D:\Software\WorkWork\arduino-1.8.5\libraries,所以只需要在这里解压zip文件。总之,请确保Grove-Ranging-sensor-VL53L0X-master文件夹在您的Arduino库文件夹中,如下图所示。

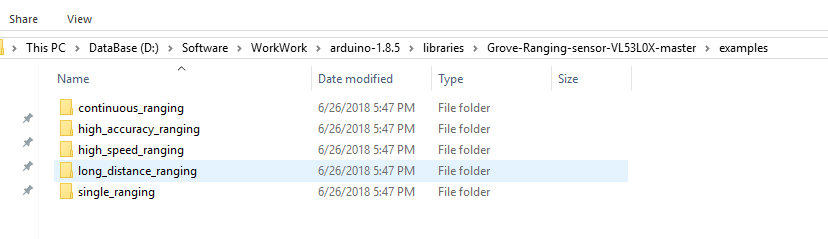
- 步骤3. 打开您刚刚解压的
Grove-Ranging-sensor-VL53L0X-master\examples文件夹,您将看到五个子文件夹:
根据您的需要选择不同的示例。然后双击xxx.ino文件打开Arduino IDE。
在这个演示中我们使用high_accuracy_ranging.ino。
-
步骤4. 上传演示程序。如果您不知道如何上传代码,请查看如何上传代码。
-
步骤5. 通过点击工具-> 串口监视器打开Arduino IDE的串口监视器。或者同时按下++ctrl+shift+m++键。如果一切正常,您将得到结果。
结果应该如下所示:
time of mesurement: 205
Measured distance:115 mm
time of mesurement: 205
Measured distance:117 mm
time of mesurement: 205
Measured distance:120 mm
time of mesurement: 205
Measured distance:125 mm
time of mesurement: 204
Measured distance:130 mm
time of mesurement: 205
Measured distance:138 mm
time of mesurement: 205
Measured distance:143 mm
time of mesurement: 205
Measured distance:144 mm
time of mesurement: 205
Measured distance:152 mm
原理图在线查看器
className="altium-ecad-viewer" data-project-src="https://files.seeedstudio.com/wiki/Grove-Time_of_Flight_Distance_Sensor-VL53L0X-/res/Grove%20-%20Time%20of%20Flight%20Distance%20Sensor%20(VL53L0X).zip" style={{borderRadius: '0px 0px 4px 4px', height: 500, borderStyle: 'solid', borderWidth: 1, borderColor: 'rgb(241, 241, 241)', overflow: 'hidden', maxWidth: 1280, maxHeight: 700, boxSizing: 'border-box'}}>
资源
- [ZIP] Grove-飞行时间距离传感器 VL53L0X Eagle 文件
- [PDF] VL53L0X 用户手册
- [PDF] VL53L0X 数据手册
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。