Grove 视觉 AI 模块
简介
Grove 视觉 AI 模块传感器是一款拇指大小的 AI 摄像头,定制传感器已预装用于人员检测的机器学习算法以及其他定制模型。它可以在几分钟内轻松部署和显示,工作于超低功耗模式,并提供两种信号传输方式和多个板载模块,使其成为入门 AI 驱动摄像头的完美选择。
在本维基中,我们将向您展示如何利用 Grove 视觉 AI 模块传感器连接 Seeed Studio XIAO 系列和 Arduino,检测人员、熊猫,并将其显示在网站上。
规格
| 参数 | 描述 | 备注 |
|---|---|---|
| 连接器 | Grove(Grove Arduino 基座) | 5V 充电和数据传输 |
| 双排 7 针插座(Seeed Duino XIAO) | 5V 充电和数据传输 | |
| USB Type-C | 5V 充电和固件烧录 | |
| 通信模式 | IIC | |
| 处理器 | Himax HX6537-A | 400MHz DSP(超低功耗) |
| 摄像头传感器 | OV2640 芯片 | 分辨率 1600*1200 |
| 麦克风 | MSM261D3526H1CPM 芯片 | -26dBFs 灵敏度 |
| 加速度传感器 | STLSM6DS3TR-C 传感器 | 3D 加速度计和 3D 陀螺仪 |
特性
- 易于使用的 AI 摄像头:在摄像头传感器中应用边缘机器学习算法,完美用于检测物体
- 即插即用:无需费力即可在几分钟内完成所有功能并显示
- 超低功耗:在检测到物体移动时激活以节省电力
- 紧凑型 AI 驱动摄像头传感器:设备本身拇指大小,基于视觉,适用于边缘智能
- 定制传感器设计:支持用户定义的自定义机器学习模型
- 支持两种信号传输:参考 Seeed Studio XIAO 优雅连接和 Grove Arduino 基座简单连接
- 板载摄像头传感器:集成 OV2640 芯片,分辨率为 1600*1200
- 板载麦克风:集成 MSM261D3526H1CPM 芯片,灵敏度为 -26dBFs
- 板载加速度传感器:集成 STLSM6DS3TR-C 传感器,用于检测 3D 加速度计和 3D 陀螺仪
- 板载 32 MB SPI 超低功耗闪存
- 单线数据输出:代表 Grove 家族简化连接,仅需一根 Grove 电缆即可连接传感器和单板
硬件概览
我们假设您可能希望了解该产品的一些基本参数。以下表格提供了 Grove Vision AI 模块传感器的特性和引脚信息。
| 特性 | 值 | 单位 |
|---|---|---|
| 工作电压 | 5 | V |
| 速率 | 115200 | |
| I2C 接口 | seeed studio XIAO & Arduino | - |
| 电源供应 | 双 7 针连接器 & Type-C | - |
| 下载与固件烧录接口 | Type-C | - |
| 尺寸 | 402013 | mm |
引脚概览
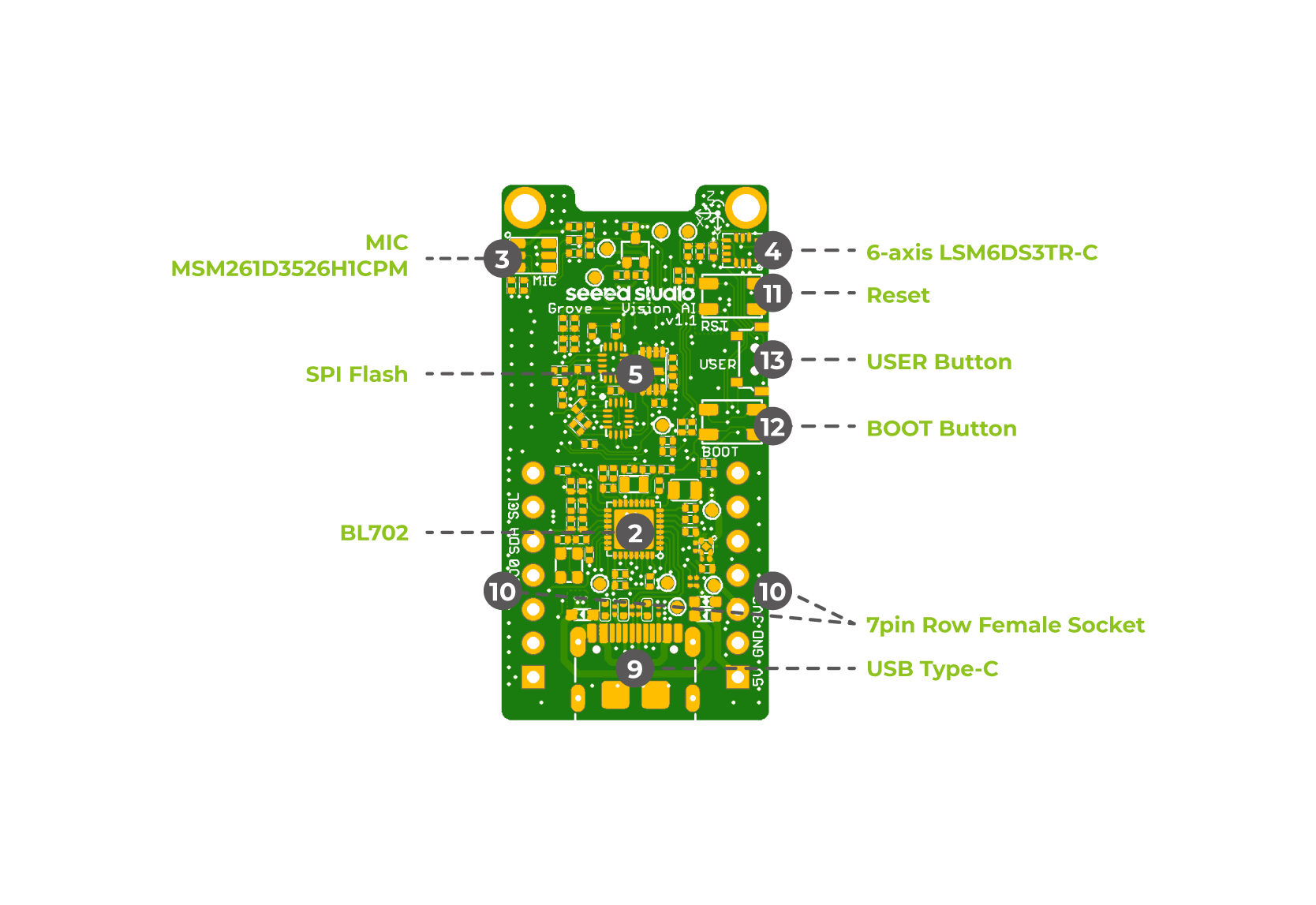
- 2 —— BL702
- 3 —— MIC MSM261D3526H1CPM
- 4 —— 6轴 LSM6DS3TR-C
- 5 —— SPI 闪存
- 9 —— USB Type-C
- 10 —— 双 7 针母插座
- 11 —— 复位按钮
- 12 —— BOOT 按钮
- 13 —— 用户按钮
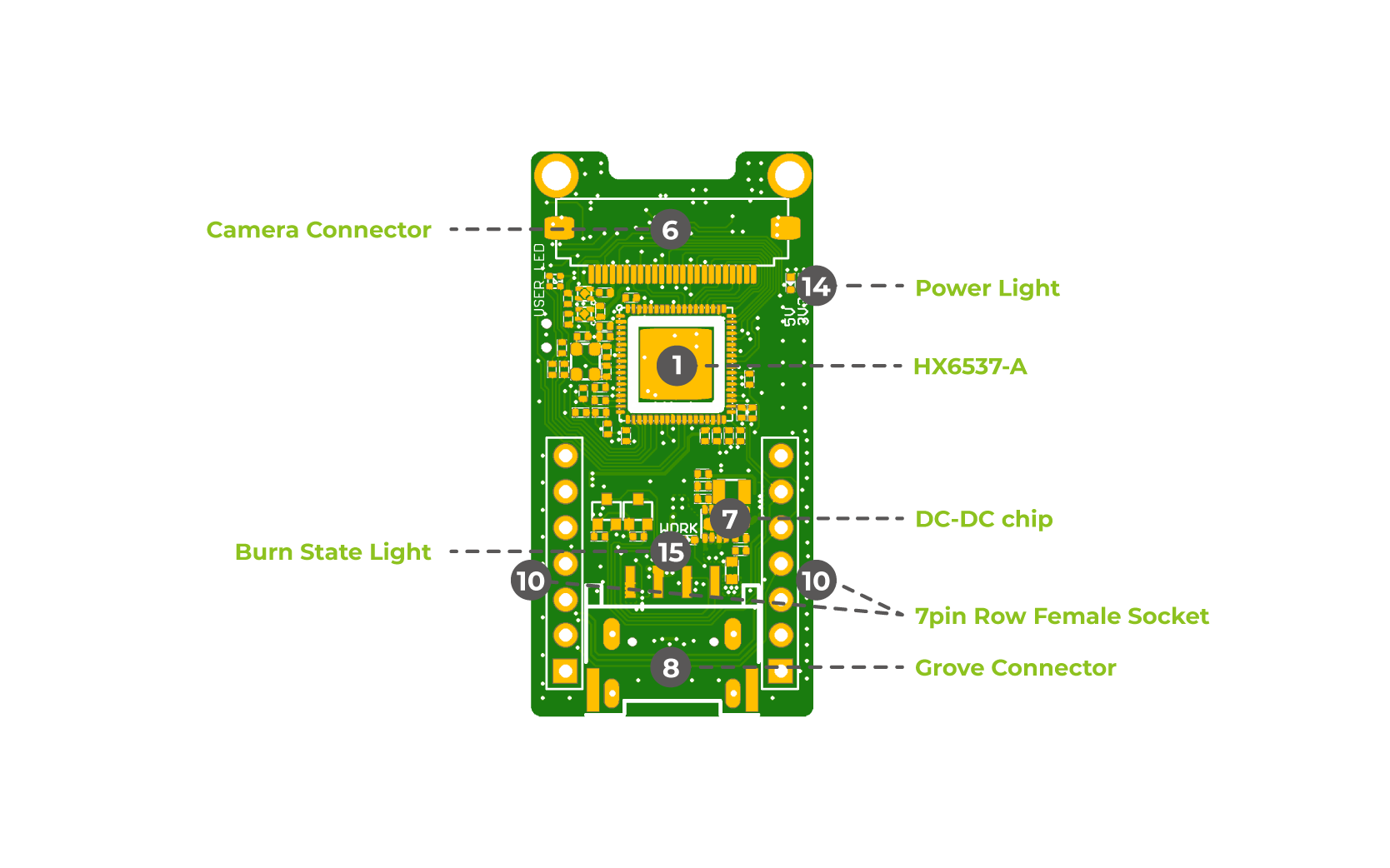
- 1 —— HX6537-A
- 6 —— 摄像头连接器
- 7 —— DC-DC 芯片
- 8 —— Grove 连接器
- 14 —— 电源指示灯
- 15 —— 烧录指示灯
入门指南
我们将向您展示该模块的基本功能,然后介绍如何自定义构建您自己的机器学习模型。但在我们将模块完全应用到项目之前,需要经过几个步骤来使模块准备就绪。
准备工作
硬件
- Grove Vision AI 模块传感器
- Windows 主机 PC(已测试 Win10)
- Type-C 数据线
Arduino 库概览
如果这是您第一次使用 Arduino,我们强烈建议您参考 Arduino 入门指南。
我们在此使用的代码提供了多种分类方法和可选模型,包括自定义模型。默认选择的是目标检测方法和预训练模型。
Seeed Studio 将在未来开发更多方法和模型,敬请关注。
功能
在开始开发代码之前,让我们先了解一下库的可用功能。
-
if (ai.begin(ALGO_OBJECT_DETECTION, MODEL_EXT_INDEX_1))- 这是选择分类方法和模型的地方。您可以将
ALGO_OBJECT_DETECTION更改为ALGO_OBJECT_COUNT或ALGO_IMAGE_CLASSIFICATION。同时,如果您将自定义模型(固件)烧录到模块中,可以将
MODEL_EXT_INDEX_1更改为MODEL_EXT_INDEX_2或 3、4,具体取决于您命名的方式。 -
object_detection_t data- 这是结果输出的结构化数据集。如果您更改了分类方法,需要将
object_detection_t相应更改为image_classification_t或object_count_t。 -
uint8_t len = ai.get_result_len()- 这里的 "len" 表示检测到的人脸数量。 -
object_detection_t data- 这里的数据表示一个 结构体 格式,类型为预定义的 "object_detection_t"。同时,如果您选择其他分类方法,需要将其更改为
image_classification_t data或object_count_t data。 -
Serial.print(data.confidence)- 结构体 格式不能直接打印,必须指向头文件中定义的具体类型。
typedef struct
{
uint16_t x;
uint16_t y;
uint16_t w;
uint16_t h;
uint8_t confidence;
uint8_t target;
} object_detection_t;
这里打印的 "confidence" 表示摄像头检测目标的置信度。
库安装
下载库文件后,打开 Arduino IDE,点击 Sketch > Include Library > Add .ZIP Library。选择刚刚下载的 zip 文件,如果库安装正确,您将在通知窗口中看到 Library added to your libraries。这表示库已成功安装。

库升级
在可预见的未来,我们将优化和升级产品库以实现更多有趣的功能。根据上述提供的库安装方法,我们在此介绍升级方法。
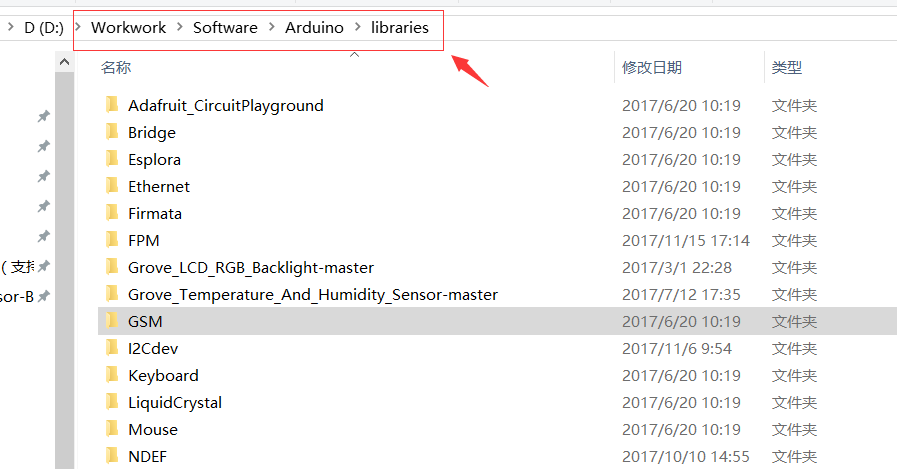
当库优化后,我们将更新链接。您可以删除电脑中原有的库文件夹,然后下载最新版本,解压后放入 Arduino IDE 的库目录中。(路径为 ...\Arduino\libraries. ....,具体取决于您设置的 Arduino 路径)
Seeed Studio XIAO / Seeeduino / Arduino 示例
现在我们已经安装了库并烧录了固件,可以在 Seeed Studio XIAO nRF52840 和 Seeeduino V4.2 上运行一些示例,使用 Grove AI 模块传感器来观察其表现。
步骤 1. 启动 Arduino 应用程序。
步骤 2. 选择您的开发板型号并将其添加到 Arduino IDE。
-
如果您希望在后续操作中使用 Seeeduino,请参考本教程完成添加。
-
如果您希望在后续操作中使用 Seeed Studio XIAO SAMD21,请参考本教程完成添加。
-
如果您希望在后续操作中使用 Seeed Studio XIAO RP2040,请参考本教程完成添加。
-
如果您希望在后续操作中使用 Seeed Studio XIAO nRF52840,请参考本教程完成添加。
示例 1 使用 Seeed Studio XIAO nRF52840 / Seeeduino / Arduino 进行人体检测
在此示例中,我们将检测人脸并统计模块检测到的人数,分别在 Seeed Studio XIAO nRF52840 Sense 和 Seeeduino V4.2 (Arduino UNO) 上运行。同时,Seeed Studio 提供了一个网站来显示模块所看到的内容。
所需材料
- 对于 Seeed Studio XIAO BLE Sense
| Seeed Studio XIAO nRF52840 Sense | Grove AI 摄像头 |
|---|---|
 | |
- 对于 Seeeduino V4.2
| Seeeduino V4.2 | 基础扩展板 | Grove AI 摄像头 |
|---|---|---|
 |  | |
操作步骤
-
步骤 3 (Seeed Studio XIAO). 准备一根 Type-C 数据线并将其连接到一个 Seeed Studio XIAO 系列开发板。逐针插入 Grove AI 模块,并使用另一根 Type-C 数据线连接模块。
两根 Type-C 数据线都应连接到 PC。最后,模块上的 Type-C 接口方向应与 Seeed Studio XIAO SAMD21 上的 Type-C 接口方向一致。例如:

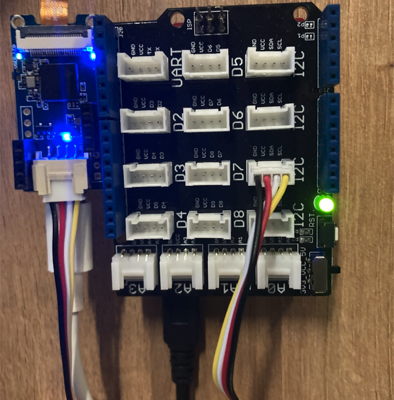
- 步骤 3 (Arduino). 准备一根 Grove 数据线并将其连接到一个 Arduino 开发板。使用另一根 Type-C 数据线连接模块。
- 步骤 4. 上传程序。
#include "Seeed_Arduino_GroveAI.h"
#include <Wire.h>
GroveAI ai(Wire);
uint8_t state = 0;
void setup()
{
Wire.begin();
Serial.begin(115200);
Serial.println("begin");
if (ai.begin(ALGO_OBJECT_DETECTION, (MODEL_INDEX_T)0x11)) // 物体检测和预训练模型 1
{
Serial.print("Version: ");
Serial.println(ai.version());
Serial.print("ID: ");
Serial.println( ai.id());
Serial.print("Algo: ");
Serial.println( ai.algo());
Serial.print("Model: ");
Serial.println(ai.model());
Serial.print("Confidence: ");
Serial.println(ai.confidence());
state = 1;
}
else
{
Serial.println("Algo begin failed.");
}
}
void loop()
{
if (state == 1)
{
uint32_t tick = millis();
if (ai.invoke()) // 开始调用
{
while (1) // 等待调用完成
{
CMD_STATE_T ret = ai.state();
if (ret == CMD_STATE_IDLE)
{
break;
}
delay(20);
}
uint8_t len = ai.get_result_len(); // 接收检测到的人数
if(len)
{
int time1 = millis() - tick;
Serial.print("Time consuming: ");
Serial.println(time1);
Serial.print("Number of people: ");
Serial.println(len);
object_detection_t data; // 获取数据
for (int i = 0; i < len; i++)
{
Serial.println("result:detected");
Serial.print("Detecting and calculating: ");
Serial.println(i+1);
ai.get_result(i, (uint8_t*)&data, sizeof(object_detection_t)); // 获取结果
Serial.print("confidence:");
Serial.print(data.confidence);
Serial.println();
}
}
else
{
Serial.println("No identification");
}
}
else
{
delay(1000);
Serial.println("Invoke Failed.");
}
}
else
{
state == 0;
}
}
打开串口监视器并将波特率设置为 115200,人员检测的结果将会连续显示。同时,模块捕获的图像也会显示在 网站 上。成功的持续输出应如下所示:
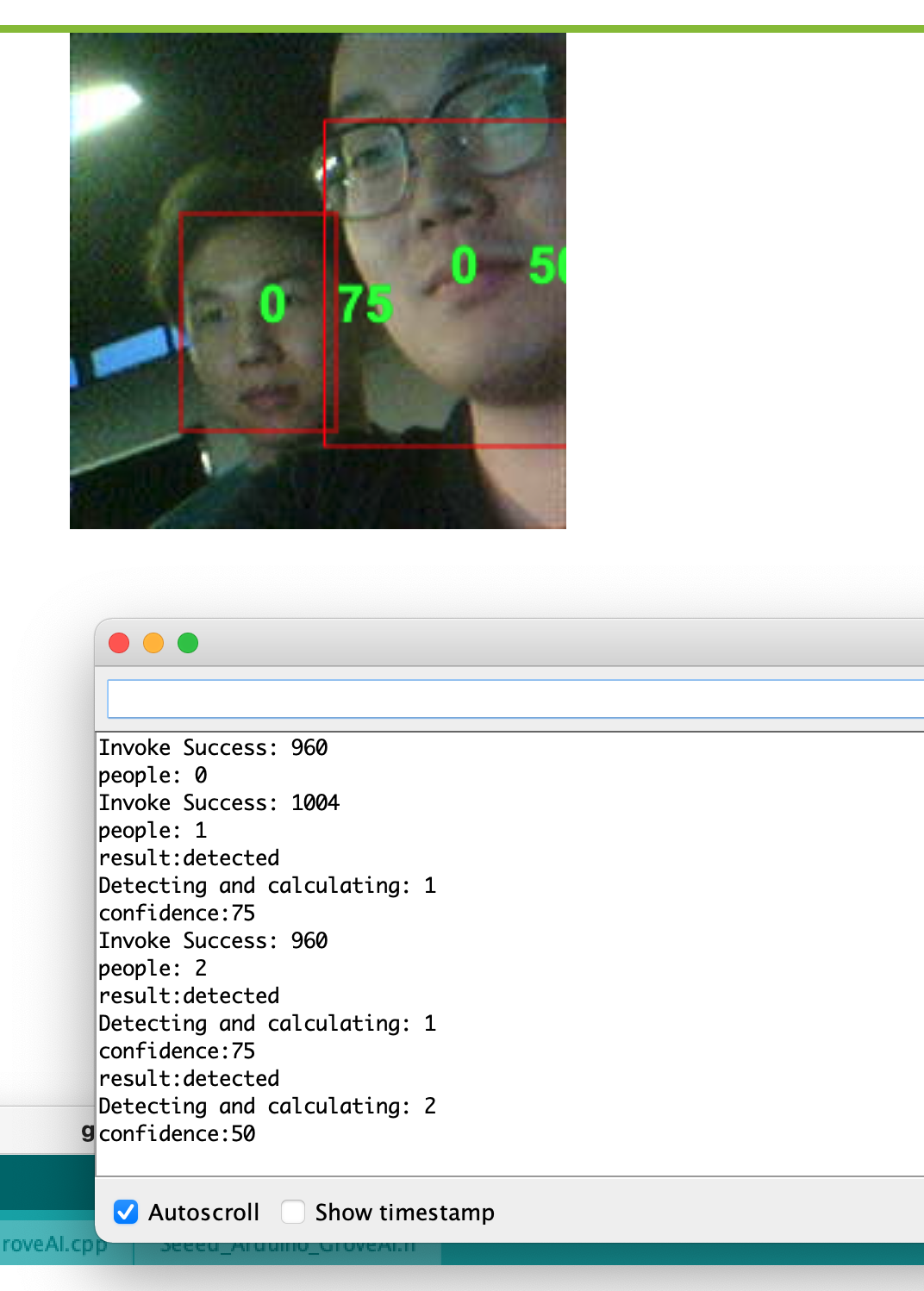
在显示 网站 上,您可以看到两个面部被框住,并标注了两个数字。数字 0 表示模块检测到的人脸,另一个数字表示置信度。
并非所有浏览器都支持 Vision AI 结果的显示。请参考下表了解各主流浏览器的支持情况。
| Chrome | Edge | Firefox | Opera | Safari |
|---|---|---|---|---|
| 支持 | 支持 | 不支持 | 支持 | 不支持 |
关于模型
Seeed Studio 提供了预训练的人员检测模型,并将在未来提供更多模型。您可以直接使用这些模型快速了解 AI 摄像头。
您可以在以下位置找到 Grove Vision AI 的固件和模型。
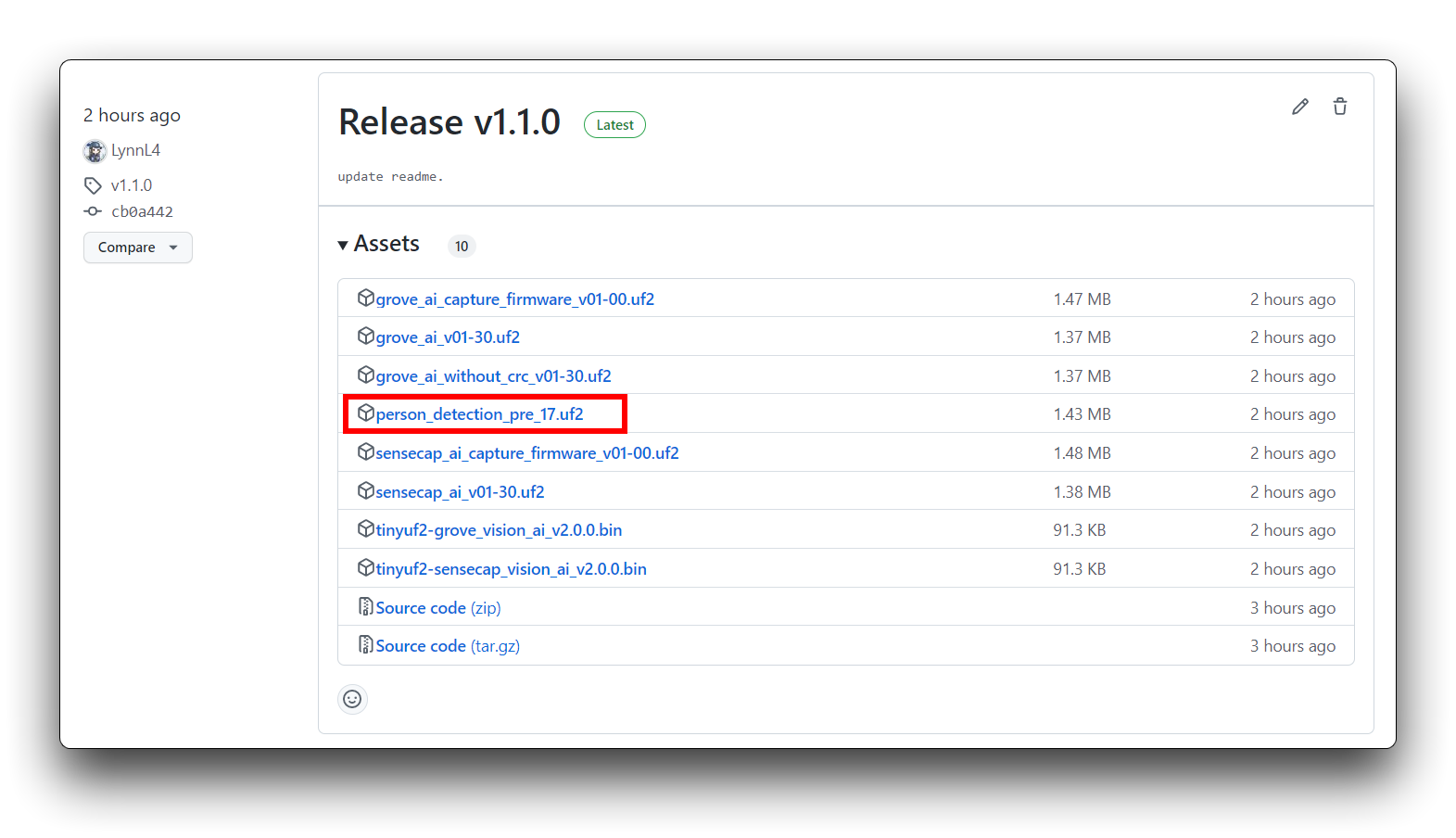
默认固件:人员检测模型
更多模型
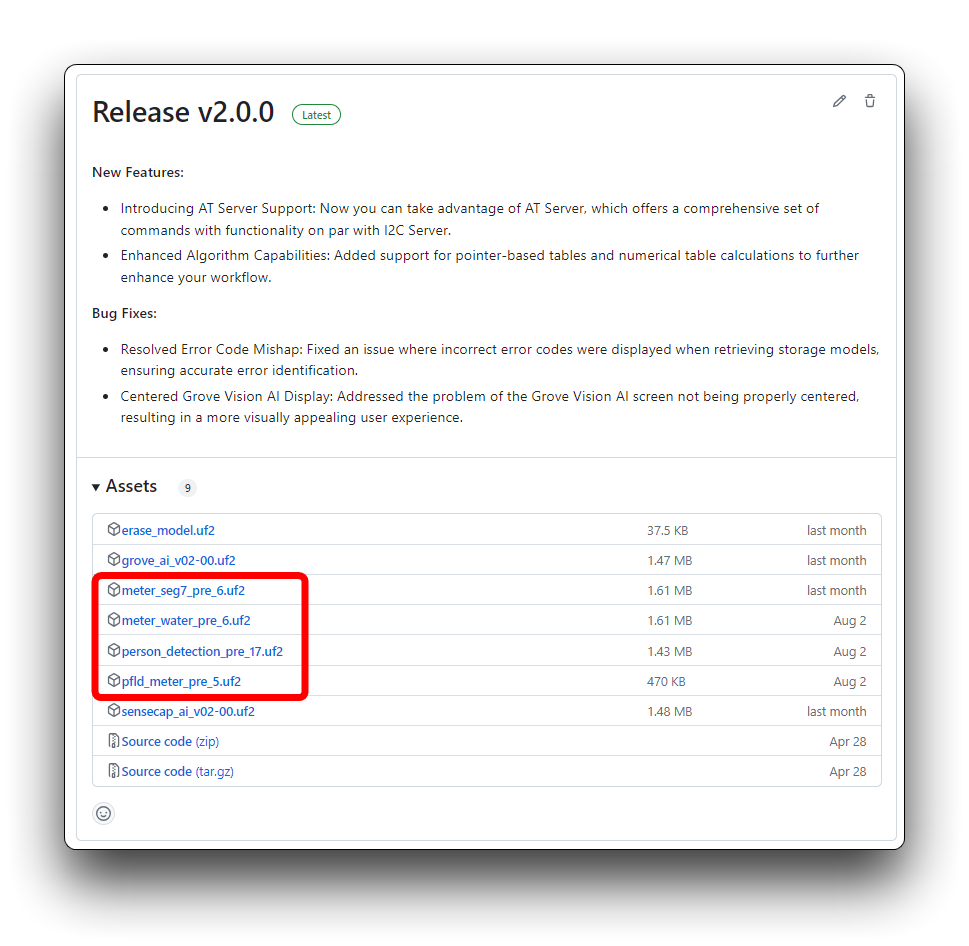
我们正在持续维护和更新更多有用的模型,您可以关注此仓库。
通常,模型文件为 UF2 格式,并具有 pre_num 格式的后缀。
自定义模型
如果您想定制自己的模型,可以参考 这里,该项目基于 YOLOV5。
或者参考 此处教程 来训练自己的模型以满足您的需求。
替换新模型
训练模型均以“.uf2”文件形式表示,这是我们所需要的格式。
:::提示 通常,模型文件为 UF2 格式,后缀格式为 pre_num。 :::
- 步骤 1. 使用 Type-C 数据线将模块连接到主机 PC,并在模块上 双击 BOOT 按钮。
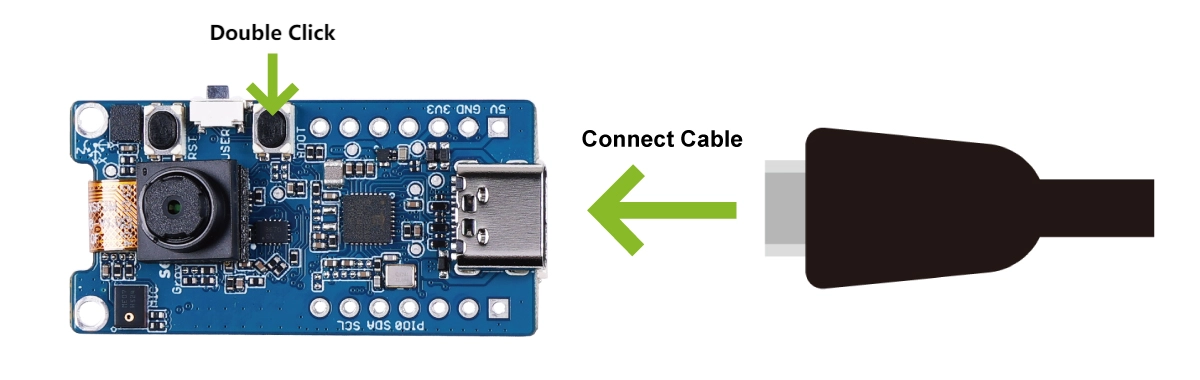
会弹出一个名为 "GROVEAI" 的磁盘。
- 步骤 2. 请将模型
.uf2文件复制到 GROVEAI 磁盘以完成固件烧录。
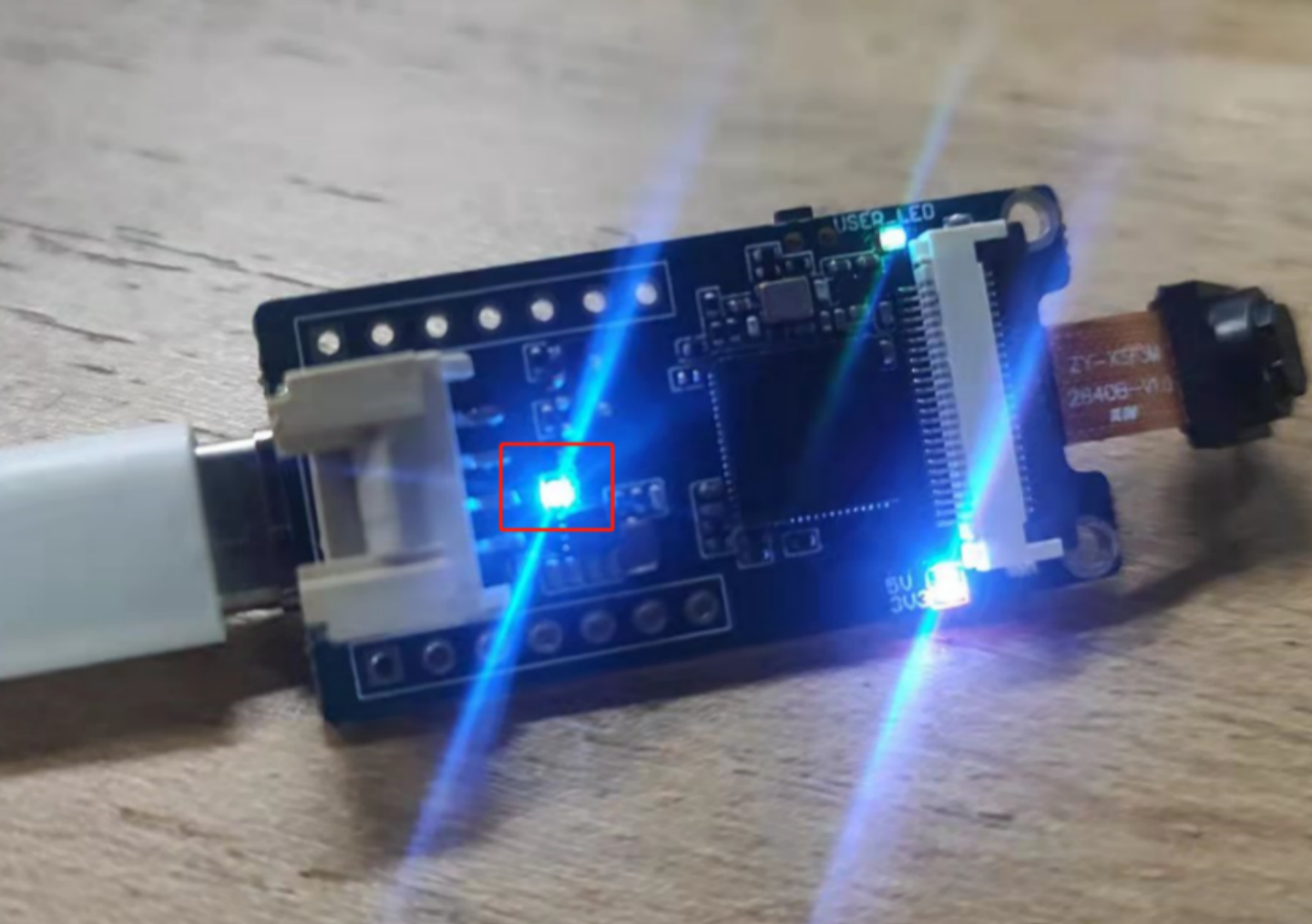
我们可以看到模块上的工作 LED 快速闪烁,这表示烧录过程正在进行中。当磁盘消失时,固件烧录过程完成。
- 步骤 3. 请根据您使用的模型修改程序。
在我们提供的示例中,setup() 函数内通过调用 ai.begin() 初始化模型。
if (ai.begin(ALGO_OBJECT_DETECTION, (MODEL_INDEX_T)0x11))
ai.begin() 有两个参数,分别是模型类型和模型编号。编号通常因模型不同而有所区别。也就是说,示例程序中的模型编号仅适用于 人员检测模型,如果您使用其他模型,则编号不再是 0x11。
:::注意 如果在使用示例时遇到错误信息 "Algo begin failed.",您应该首先检查模型编号是否错误。 :::
那么如何确定模型编号呢?我们的研发工程师提供了一份详细的介绍文档供开发者阅读。
但如果您不想阅读如此长的文章,有一个简单的方法可以确定模型编号:注意模型文件名中的最后一个数字,这就是我们需要的编号。
例如,对于模型 pfld_meter_pre_5.uf2,最后一位数字是 5,这意味着模型编号是 5。您可以直接使用:
ai.begin(ALGO_OBJECT_DETECTION, (MODEL_INDEX_T)5)
或者将其重写为十六进制:
ai.begin(ALGO_OBJECT_DETECTION, (MODEL_INDEX_T)0x05)
异常处理
如果您在实际使用中遇到意外情况,或者使用不当导致结果异常,请参考以下步骤进行故障排查并尝试修复模块。
第 1 部分. 检查 BootLoader 版本
您可能需要检测 BootLoader 版本是否需要更新,以决定是否进行更新。检查版本号的方法如下:
通过 USB-C 端口将 Grove Vision AI 连接到您的电脑。然后双击 Boot 按钮,直到电脑弹出一个名为 GROVEAI 的 USB 闪存驱动器。
打开该磁盘驱动器并打开 INFO_UF2.TXT 文件。
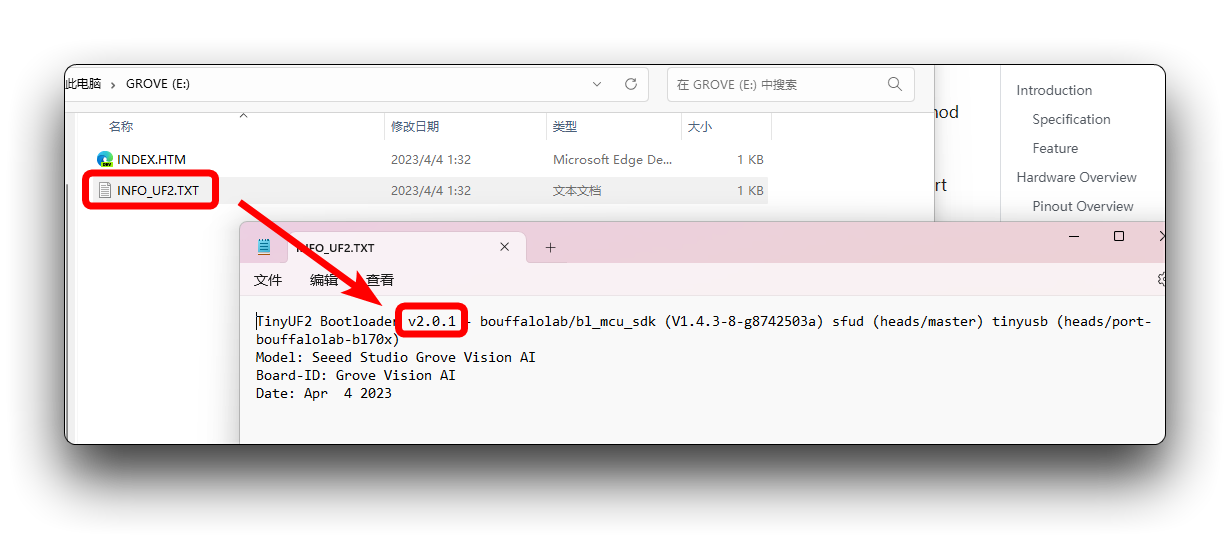
如图所示,您可以在第一行看到 BootLoader 版本号。截至 2023 年 9 月,最新的 BootLoader 版本号应为 v2.0.1。如果您检查到相同的版本号,则原则上无需进行下一步。
第 2 部分. 更新 BootLoader
如果您的 Grove Vision AI 无法被电脑识别,并且没有显示端口号,则可能需要更新 BootLoader。
- 步骤 1. 在 Windows PC 上下载 BootLoader
.bin文件。
请通过以下链接下载最新版本的 BootLoader 文件。BootLoader 的名称通常为 tinyuf2-grove_vision_ai_vx.x.x.bin。
这是控制 BL702 芯片的固件,该芯片负责建立电脑与 Himax 芯片之间的连接。最新版本的 BootLoader 已修复 Vision AI 无法被 Mac 和 Linux 识别的问题。
- 步骤 2. 下载并打开 BLDevCube.exe 软件,选择 BL702/704/706,然后点击 Finish。
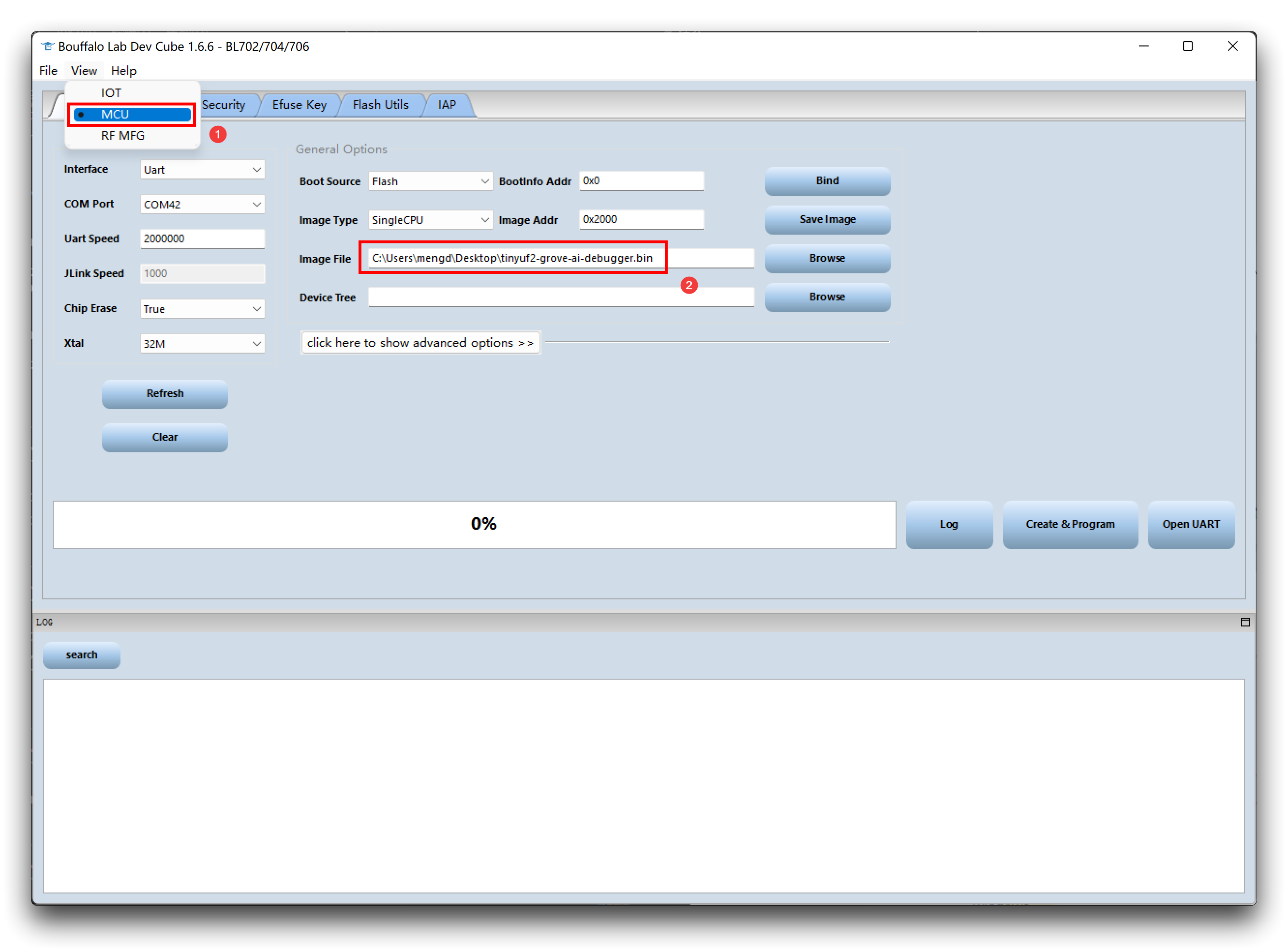
- 步骤 3. 点击 View,首先选择 MCU。然后移动到 Image file,点击 Browse 并选择您刚刚下载的固件。
-
步骤 4. 确保没有其他设备连接到电脑。然后按住模块上的 Boot 按钮,将其连接到电脑。

我们可以看到模块背面的 5V 灯和 3.3V LED 灯亮起,然后松开 Boot 按钮。

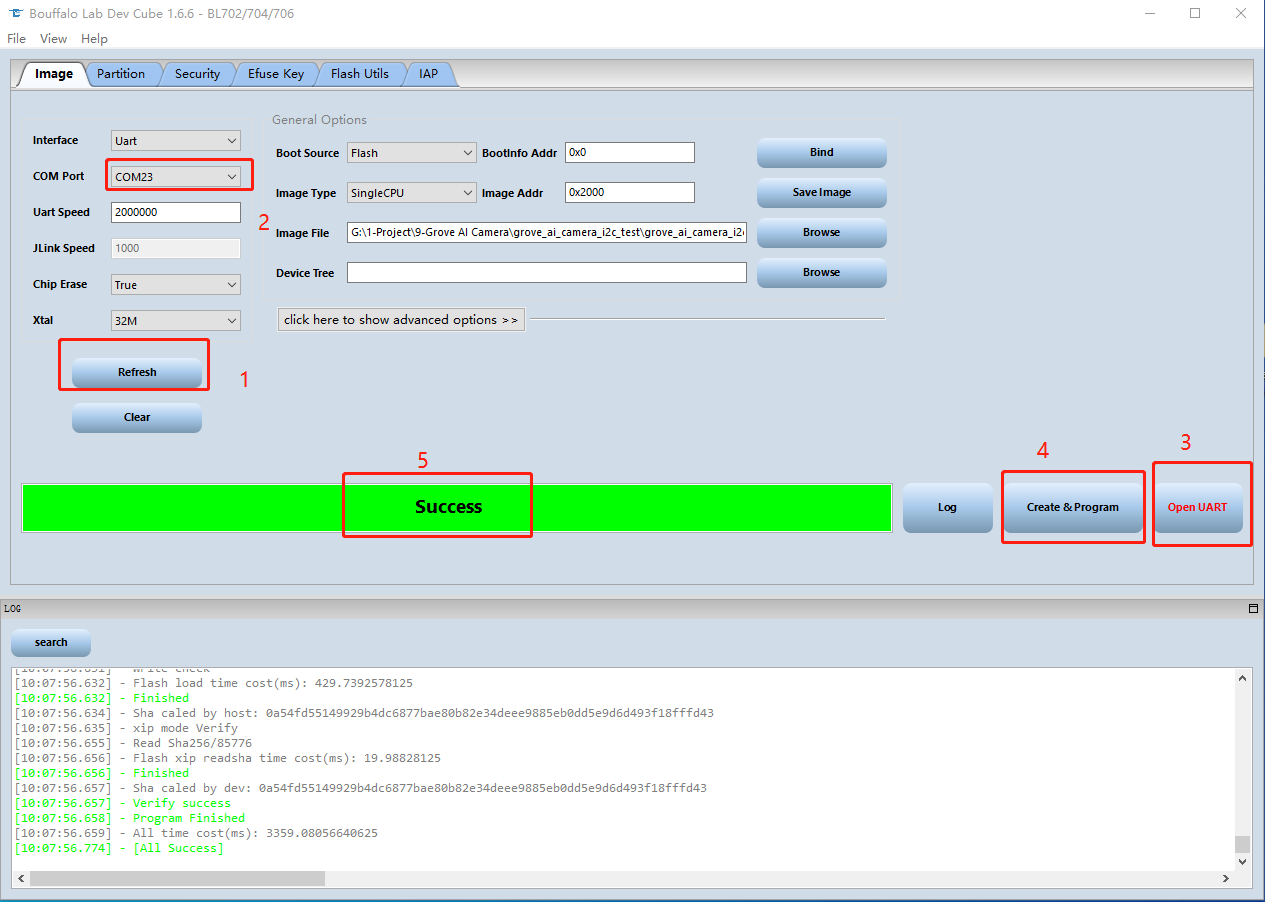
-
步骤 5. 回到电脑上的 BLDevCube 软件,点击 Refresh 并选择合适的端口。然后点击 Open UART,将 Chip Erase 设置为 True,接着点击 Create&Program,等待过程完成。
- 步骤 6. 建议再次检查 Vision AI 的版本号,以确保使用的是最新的 BootLoader。
第三部分:恢复出厂固件
:::提示 如果在最新版本的 Windows 11 上上传固件导致设备无法使用,您可能需要参考 更新 BootLoader 部分。 :::
- 步骤 1. 擦除固件
:::注意 您可以尝试跳过此步骤,直接将固件复制到 Vision AI。如果成功,则无需擦除原始固件。如果失败,则可能需要擦除固件。 :::
请使用您拥有的 Arduino 主板,推荐使用 Seeed Studio XIAO 系列、Wio Terminal 或 Seeeduino。通过 IIC 接口将 Grove Vision AI 连接到主板。
打开 Arduino IDE 并上传以下程序以擦除固件。
#include "Seeed_Arduino_GroveAI.h"
#include <Wire.h>
WEI wei(Wire);
void setup()
{
Wire.begin();
Serial.begin(115200);
while (!Serial)
{
/* code */
}
delay(1000);
Serial.println("Press any key to start erase");
}
void loop()
{
if (Serial.available())
{
while (Serial.available())
{
Serial.read();
}
uint32_t id = wei.ID();
Serial.print("ID: 0x");
Serial.println(id, HEX);
wei.enter_bootloader();
Serial.println("Erase");
wei.erase();
Serial.println("Erase done");
}
}
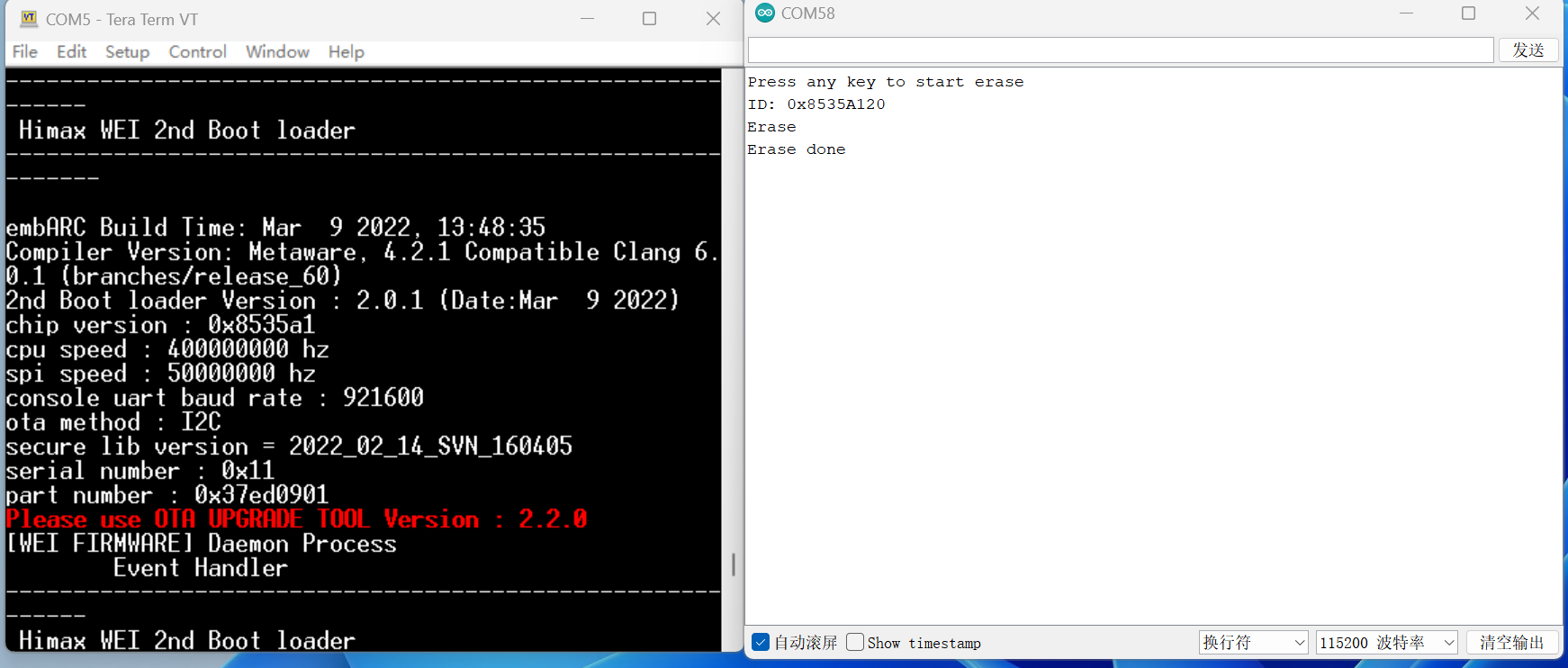
打开串口监视器,输入一些随机字符,例如 "a",点击发送,然后擦除操作将开始执行。如果您看到以下消息,则证明固件擦除成功。我们可以进入下一步。
- 步骤 2. 使用 Type-C 数据线将模块连接到主机电脑,并 双击 模块上的 BOOT 按钮。
会弹出一个名为 "GROVEAI" 的磁盘。
- 步骤 3. 下载出厂固件。
请通过以下链接下载最新版本的出厂固件。出厂固件的名称通常为 grove_ai_without_crc_vxx.uf2 或 grove_ai_vxx.uf2。
:::提示 截至 2023 年 9 月,最新固件版本为 grove_ai_v02-00.uf2。 :::
- 步骤 4. 刷写出厂固件。
将 grove_ai_without_crc_vxx.uf2 或 grove_ai_vxx.uf2 文件复制到 GROVEAI 磁盘中以完成固件刷写。
以上三个部分需要依次判断并执行。当上述步骤完成后,您可以再次进行操作。如果仍然存在问题,请联系我们的技术支持团队。
故障排查
Q1: 主要的连接方法是什么?
- a. 首先连接微控制器和模块。
- b. 其次连接微控制器与主机电脑。
- c. 最后连接模块与主机电脑。
Q2: 为什么我在网站上看不到图像显示?也无法检测?
- a. 模块是否过热?仅连接模块可能会导致过热问题,使模块暂时无法正常工作。
- b. 是否按照正确的方法连接?
Q3: 为什么《Grove》Vision AI 在使用过程中突然出现“Algo begin failed.”错误?
在我们提供的示例中,setup()函数通过调用 ai.begin() 来初始化模型。
if (ai.begin(ALGO_OBJECT_DETECTION, (MODEL_INDEX_T)0x11))
ai.begin() 有两个参数,分别是模型类型和模型编号。不同模型的编号通常不同。也就是说,示例程序中的模型编号仅适用于 人员检测模型,如果使用其他模型,则编号不再是 0x11。
如果在使用示例时遇到错误信息“Algo begin failed.”,首先应该检查模型编号是否错误。
那么如何确定模型编号呢?我们的研发工程师提供了一份详细的介绍文档供开发者阅读。
但如果您不想阅读这么长的文章,有一个简单的方法可以确定模型编号:注意发布版本中模型名称的最后一个数字,这就是我们需要的编号。
例如,对于模型 pfld_meter_pre_5.uf2,最后一位数字是 5,这意味着模型编号是 5。您可以直接使用:
ai.begin(ALGO_OBJECT_DETECTION, (MODEL_INDEX_T)5)
或者将其重写为十六进制:
ai.begin(ALGO_OBJECT_DETECTION, (MODEL_INDEX_T)0x05)
资源
技术支持与产品讨论
感谢您选择我们的产品!我们致力于为您提供不同的支持,以确保您使用我们的产品时体验顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。