NVIDIA® Jetson AGX Orin 32GB H01 套件

请注意,以下更新已于 2024 年 11 月 25 日应用到该产品:
- 更改了 5V 供电方案(电源 IC 从 ONNCP3020ADR2G 更换为 TI TPS53015DGS,并相应调整了外围元件),解决了在使用某些动态电流较高的 USB 设备时设备重启的问题。
- 优化了板卡布局,放大了风扇线缆的开槽,以适配风扇布线。
- 为了稳定配件供应,WiFi 模组型号从 8265.NGW 更换为 BL-M8822CP1,并相应更新了软件驱动。
本教程将指导你如何在 Jetson AGX Orin 32GB H01 套件上安装 JetPack。
前置条件
- Ubuntu 主机电脑(原生安装或使用 VMware Workstation Player 的虚拟机)。
- Jetson AGX Orin H01 套件。
- USB Type-C 数据传输线
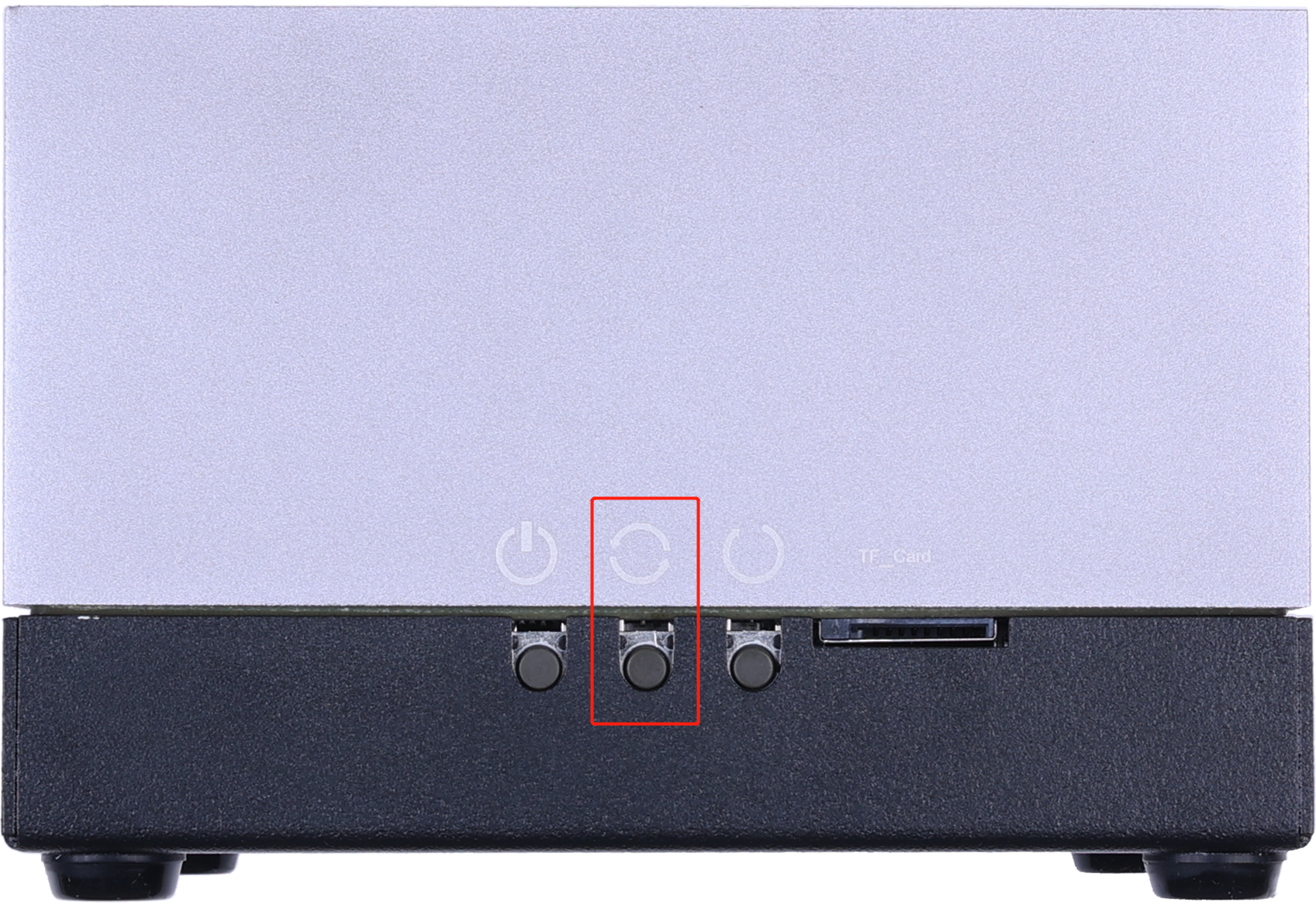
进入强制恢复模式
- 步骤 1: 板卡上有一个恢复按键,它位于下图所示的三个按键的中间。按住恢复按键,然后将板卡连接到电源即可进入强制恢复模式。
- 步骤 2: 使用 USB Type-C 数据传输线将 Jetson AGX Orin 32GB H01 套件与 Ubuntu 主机电脑连接。

- 步骤 3: 在 Ubuntu 主机上使用
lsusb命令,确认设备是否已进入恢复模式。
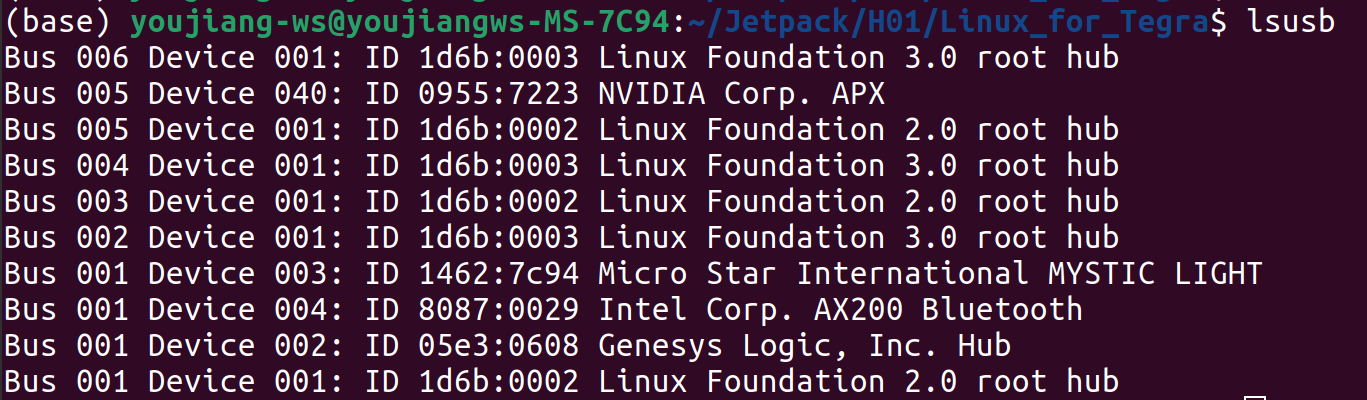
如果日志中出现 0955:7223 NVIDIA Corp.,则表示设备已进入恢复模式。
下载外设驱动
首先,你需要为该板卡安装外设驱动。这些驱动是部分硬件外设在板卡上正常工作所必需的。点击下方链接,根据 JetPack 版本下载对应驱动。
| JetPack 版本 | L4T 版本 | 驱动下载链接 | L4T 下载链接 |
|---|---|---|---|
| 5.0.2 | 35.1 | Download | Download |
| 5.1.1 | 35.3.1 | Download | Download |
| 5.1.4 | 35.6.0 | Download | Download |
| 6.0 | 36.3 | Download | Download |
| 6.1 | 36.4 | Download | Download |
| 6.2 | 36.4.3 | Download | Download |
| 7.2 | 39.2.0 | Download | Download |
刷写到 Jetson
NVIDIA® Jetson AGX Orin 32GB H01 套件预装了 JetPack 5.1.4 操作系统。默认用户名和密码为 user: nvidia / password: nvidia。收到设备后,你可以直接登录系统开始使用,无需重新刷写系统。
如果你的系统损坏,可以参考下面的步骤重新刷写系统。
- JP5.0.2/JP5.1.1
- JP5.1.4
- JP6.0
- JP6.1
- JP6.2
- JP7.2
这里我们将使用:NVIDIA L4T 35.1 来在 Jetson AGX Orin 32GB H01 套件上安装 Jetpack 5.0.2,或使用 NVIDIA L4T 35.3.1 来安装 Jetpack 5.1.1。
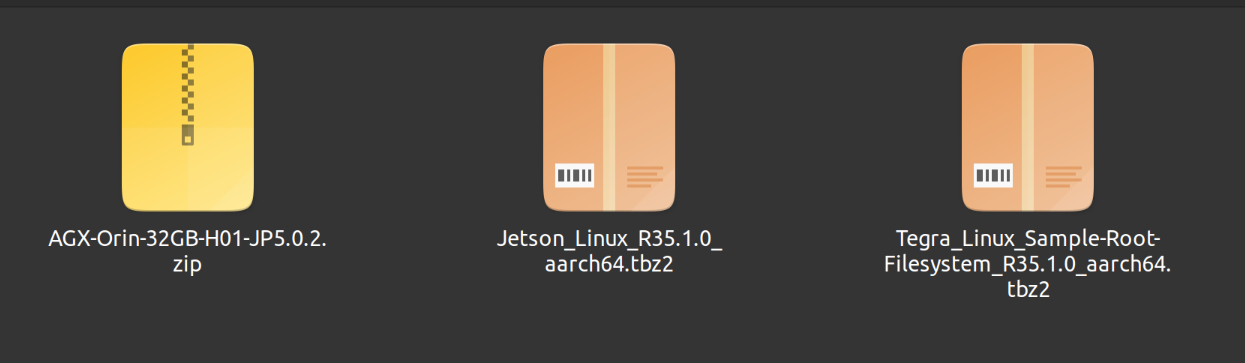
- 步骤 1: 在主机电脑上下载合适的 NVIDIA 驱动。所需驱动如下所示:
- 步骤 2: 将之前下载的外设驱动移动到与 NVIDIA 驱动相同的文件夹中。现在你会在同一文件夹中看到三个压缩文件。
- 步骤 3: 通过进入包含这些文件的文件夹,解压 Jetson_Linux_R35.1.0_aarch64.tbz2 和 Tegra_Linux_Sample-Root-Filesystem_R35.1.0_aarch64.tbz2,并应用更改
cd <directory_where_the_files_are_located>
tar xf Jetson_Linux_R35.1.0_aarch64.tbz2
cd Linux_for_tegra/rootfs
sudo tar xfp ../../Tegra_Linux_Sample-Root-Filesystem_R35.1.0_aarch64.tbz2
cd ..
sudo ./apply_binaries.sh
- 步骤 4: 解压 AGX-Orin-32GB-H01-JP5.0.2.zip。这里我们另外安装用于解压 .zip 文件的 unzip 软件包
cd ..
sudo apt install unzip
unzip AGX-Orin-32GB-H01-JP5.0.2.zip
此时会询问是否替换文件。输入 A 并按下 ENTER 以替换必要的文件

- 步骤 5: 将系统刷写到 eMMC
cd Linux_for_Tegra
sudo ./flash.sh jetson‐agx‐orin‐devkit mmcblk0p1
如果刷写过程成功,你会看到如下输出
遇到的错误
- 在 Jetpack 5.1.1 上,AGX Orin 和 NX Orin 出现 ERROR: failed to read rcm_state 错误
- NVIDIA 对 Jetson AGX Orin 做了 PCN 变更,但这不是 Seeed 的 PCN 变更。
- 除了 Wiki 中提到的物料外,请在 Jetson Linux 35.3.1 页面底部下载 Overlay_PCN210361_PCN210100_r35.3.1.tbz2。
- 在解压 Jetson_Linux 之后、应用二进制文件之前,请先解压 Overlay_PCN210361_PCN210100_r35.3.1.tbz2。然后将所有文件和文件夹复制到 Linux_For_Tegra 中(合并,而不是跳过)。
- 然后继续按照指南中的剩余步骤操作。
这里我们将使用:NVIDIA L4T 35.6.0 在 Jetson AGX Orin 32GB H01 套件上安装 Jetpack 5.1.4。
在 Ubuntu 主机的终端窗口中输入以下命令:
wget https://developer.nvidia.com/downloads/embedded/l4t/r35_release_v6.0/release/jetson_linux_r35.6.0_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/l4t/r35_release_v6.0/release/tegra_linux_sample-root-filesystem_r35.6.0_aarch64.tbz2
tar xf jetson_linux_r35.6.0_aarch64.tbz2
sudo tar xpf tegra_linux_sample-root-filesystem_r35.6.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
cd Linux_for_Tegra/
sudo ./tools/l4t_flash_prerequisites.sh
sudo ./apply_binaries.sh
sudo tar xf 605_jp514.tbz2 # Please copy 605_jp514.tbz2 to the Linux_for_Tegra/ directory before execution.
从以下命令中选择一个来执行烧录操作:
(1). 将系统烧录到 eMMC:
sudo ./flash.sh jetson-agx-orin-devkit internal
(2). 将系统烧录到 SSD:
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_t234_nvme.xml \
--showlogs --network usb0 jetson-agx-orin-devkit external
烧录完成后,设备会自动重启。
这里我们将使用 NVIDIA L4T 36.3 在 Jetson AGX Orin 32GB H01 Kit 上安装 Jetpack 6.0。
- 步骤 1: 在主机 PC 上下载 NVIDIA 驱动程序。所需驱动程序如下所示:
- 步骤 2: 将之前下载的外设驱动移动到与 NVIDIA 驱动相同的文件夹中。现在你会在同一文件夹中看到 3 个压缩文件。
- 步骤 3: 通过进入包含这些文件的文件夹并应用更改,解压 Jetson_Linux_R36.3.0_aarch64.tbz2 和 Tegra_Linux_Sample-Root-Filesystem_R36.3.0_aarch64.tbz2:
cd < directory_where_the_files_are_located >
tar xf Jetson_Linux_R36.3.0_aarch64.tbz2
sudo tar xfp Tegra_Linux_Sample-Root-Filesystem_R36.3.0_aarch64.tbz2 -C Linux_for_tegra/rootfs
cd Linux_for_tegra
sudo ./tools/l4t_flash_prerequisites.sh
sudo ./apply_binaries.sh
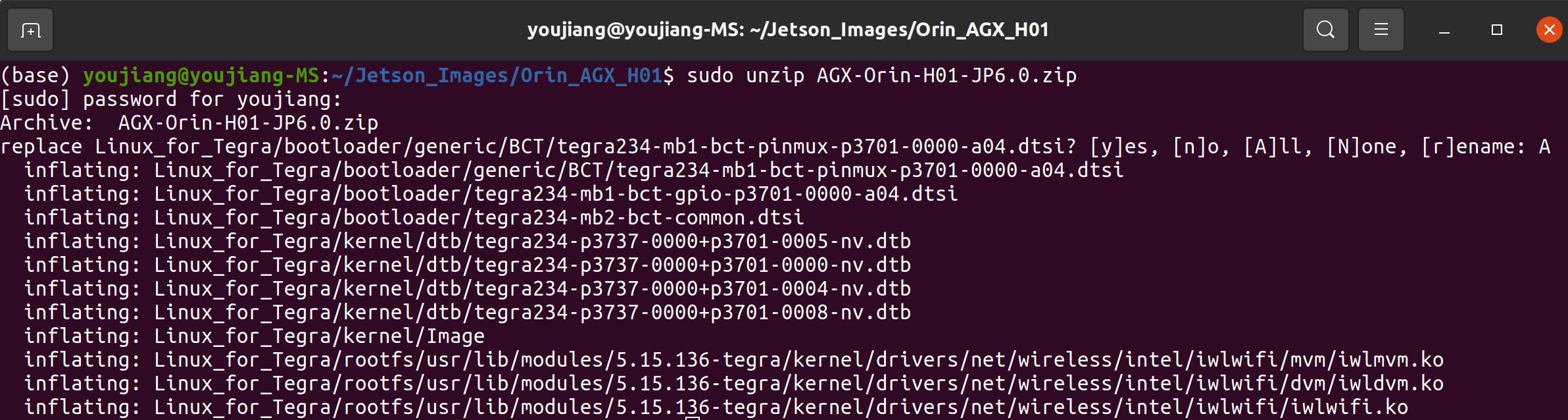
- 步骤 4: 解压 AGX-Orin-H01-JP6.0.zip。这里我们另外安装用于解压 .zip 文件所需的 unzip 软件包。
cd ..
sudo apt install unzip
sudo unzip AGX-Orin-H01-JP6.0.zip
此时会询问是否替换文件。输入 A 并按下 ENTER 以替换必要的文件。
- 步骤 5: 将系统烧录到 eMMC
cd Linux_for_Tegra
sudo ./flash.sh jetson-agx-orin-devkit internal
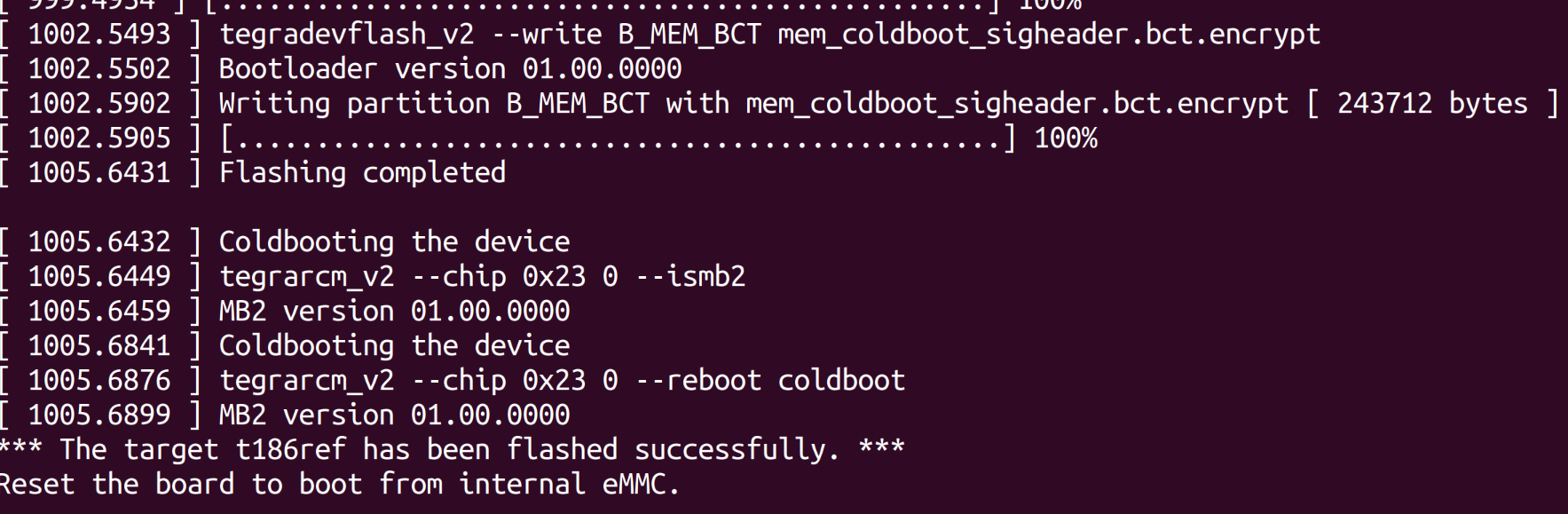
如果烧录过程成功,你会看到如下输出:

这里我们将使用 NVIDIA L4T 36.4 在 Jetson AGX Orin 32GB H01 Kit 上安装 Jetpack 6.1。
- 步骤 1: 在 Ubuntu 主机 PC 上下载 NVIDIA 驱动程序。所需驱动程序如下所示:
- 步骤 2: 将之前下载的外设驱动移动到与 NVIDIA 驱动相同的文件夹中。现在你会在同一文件夹中看到 3 个压缩文件。
你可以使用以下命令来验证下载的文件是否完整。

- 步骤 3: 通过进入包含这些文件的文件夹并应用更改,解压 Jetson_Linux_R36.4.0_aarch64.tbz2 和 Tegra_Linux_Sample-Root-Filesystem_R36.4.0_aarch64.tbz2:
cd <path_to_files>
tar xf Jetson_Linux_R36.4.0_aarch64.tbz2
sudo tar xfp Tegra_Linux_Sample-Root-Filesystem_R36.4.0_aarch64.tbz2 -C Linux_for_tegra/rootfs
cd Linux_for_tegra
sudo ./tools/l4t_flash_prerequisites.sh
sudo ./apply_binaries.sh
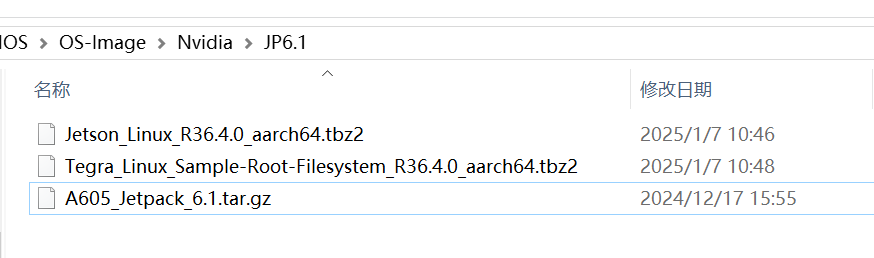
- 步骤 4: 解压 A605_Jetpack_6.1.tar.gz:
cd ..
tar xf A605_Jetpack_6.1.tar.gz
sudo cp -r 605_jetpack6.1/Linux_for_Tegra/* Linux_for_Tegra/
- 步骤 5: 将系统烧录到 eMMC:
cd Linux_for_Tegra
sudo ./flash.sh jetson-agx-orin-devkit internal
如果烧录过程成功,你会看到如下输出:
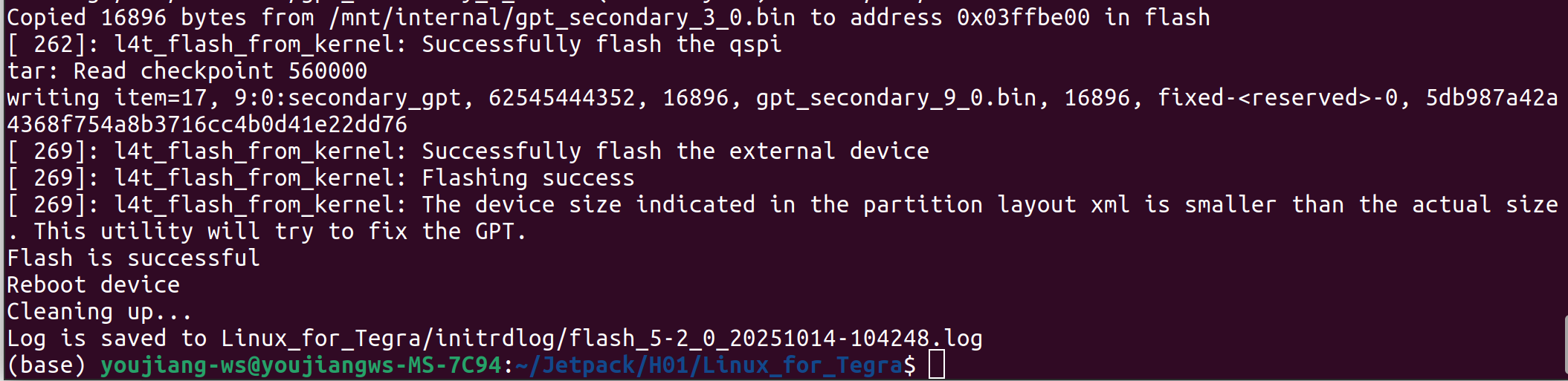
我们也可以运行以下命令将系统安装到 SSD 上:
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_t234_nvme.xml --showlogs --network usb0 jetson-agx-orin-devkit external
这里我们将使用 NVIDIA L4T 36.4 在 Jetson AGX Orin 32GB H01 Kit 上安装 Jetpack 6.2。
- 步骤 1: 在 Ubuntu 主机 PC 上下载 NVIDIA 驱动程序。所需驱动程序如下所示:
- 步骤 2: 将之前下载的外设驱动移动到与 NVIDIA 驱动相同的文件夹中。现在你会在同一文件夹中看到 3 个压缩文件。
与 Jetpack 6.1 的烧录过程类似!
你可以使用以下命令来验证下载的文件是否完整。
- 步骤 3: 通过进入包含这些文件的文件夹并应用更改,解压 Jetson_Linux_R36.4.3_aarch64.tbz2 和 Tegra_Linux_Sample-Root-Filesystem_R36.4.3_aarch64.tbz2:
cd <path_to_files>
tar xf Jetson_Linux_R36.4.3_aarch64.tbz2
sudo tar xfp Tegra_Linux_Sample-Root-Filesystem_R36.4.0_aarch64.tbz2 -C Linux_for_tegra/rootfs
cd Linux_for_tegra
sudo ./tools/l4t_flash_prerequisites.sh
sudo ./apply_binaries.sh
- 步骤 4: 解压 605_jp62.tar.gz:
cd ..
tar xf 605_jp62.tar.gz
sudo cp -r 605_jp62/Linux_for_Tegra/* Linux_for_Tegra/
- 步骤 5: 将系统烧录到 eMMC:
cd Linux_for_Tegra
sudo ./flash.sh jetson-agx-orin-devkit internal
如果烧录过程成功,你会看到如下输出:
我们也可以运行以下命令将系统安装到 SSD 上:
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_t234_nvme.xml --showlogs --network usb0 jetson-agx-orin-devkit external
这里我们将使用 NVIDIA L4T 39.2.0 在 Jetson AGX Orin 32GB H01 Kit 上安装 JetPack 7.2。
- 步骤 1: 在 Ubuntu 主机 PC 上下载 NVIDIA BSP 和 RootFS 软件包。所需的 Jetson Linux 39.2.0 文件如下所示:
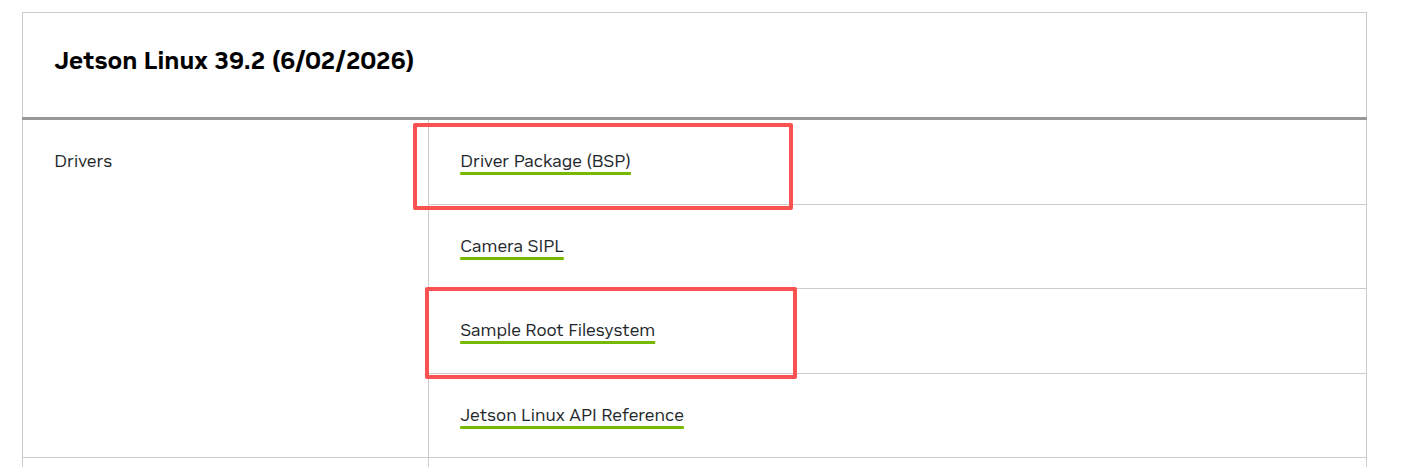
你也可以使用以下命令来下载这些文件:
wget https://developer.nvidia.com/downloads/embedded/L4T/r39_Release_v2.0/release/Jetson_Linux_R39.2.0_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/L4T/r39_Release_v2.0/release/Tegra_Linux_Sample-Root-Filesystem_R39.2.0_aarch64.tbz2
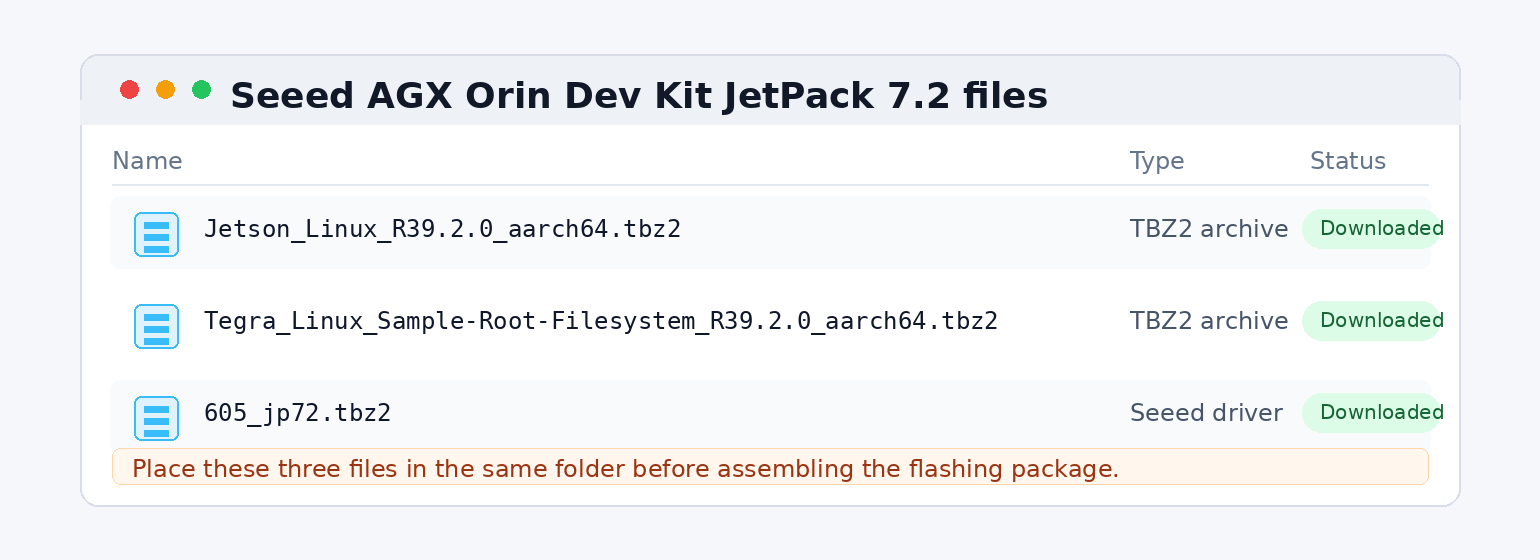
- 步骤 2: 下载 Jetson AGX Orin 32GB H01 Kit JetPack 7.2 外设驱动包 605_jp72.tbz2,然后将其放入与 NVIDIA BSP 和 RootFS 软件包相同的文件夹中。现在你会在同一文件夹中看到 3 个压缩文件。
- 步骤 3: 解压 Jetson_Linux_R39.2.0_aarch64.tbz2 和 Tegra_Linux_Sample-Root-Filesystem_R39.2.0_aarch64.tbz2,然后应用 NVIDIA 二进制文件:
cd <path_to_files>
tar xf Jetson_Linux_R39.2.0_aarch64.tbz2
sudo tar xfp Tegra_Linux_Sample-Root-Filesystem_R39.2.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
cd Linux_for_Tegra
sudo ./tools/l4t_flash_prerequisites.sh
sudo ./apply_binaries.sh
- 步骤 4: 解压 605_jp72.tbz2:
cd ..
tar xf 605_jp72.tbz2
sudo cp -r 605_jp72/Linux_for_Tegra/* Linux_for_Tegra/
- 步骤 5: 将系统烧录到 eMMC:
cd Linux_for_Tegra
sudo ./flash.sh jetson-agx-orin-devkit internal
如果烧录过程成功,你会看到如下输出:
我们也可以运行以下命令将系统安装到 SSD 上:
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_t234_nvme.xml --showlogs --network usb0 jetson-agx-orin-devkit external
开发者工具
预装 Jetpack,便于快速开发与边缘 AI 集成
Jetson Software 从 NVIDIA JetPack™ SDK 开始,它提供了完整的开发环境,并包含 CUDA-X 加速库和其他 NVIDIA 技术,以帮助你快速启动开发。JetPack 包含 Jetson Linux 驱动程序包,为 Jetson 平台提供 Linux 内核、引导加载程序、NVIDIA 驱动、烧录工具、示例文件系统和工具链。它还包括安全特性、空中升级能力等更多功能。
计算机视觉与嵌入式机器学习
- Deepstream 为基于 AI 的多传感器处理以及 Jetson 上的视频和图像理解提供完整的流式分析工具包。
- TAO 基于 TensorFlow 和 PyTorch 构建,是 NVIDIA TAO 框架的低代码版本,可加速模型训练
- alwaysAI:在 reComputer 的边缘侧直接构建、训练和部署计算机视觉应用。通过企业订阅,可免费访问 100+ 预训练计算机视觉模型,并在云端通过几次点击训练自定义 AI 模型。查看我们的 wiki 指南以开始使用 alwaysAI。
- edge impulse:用于在边缘部署音频、分类和目标检测应用的最简单嵌入式机器学习流水线,对云零依赖。
- Roboflow 提供工具,将原始图像转换为自定义训练的目标检测和分类计算机视觉模型,并部署该模型以供应用使用。请参阅 https://docs.roboflow.com/inference/nvidia-jetson 了解如何使用 Roboflow 部署到 NVIDIA Jetson。
- ultralytics yolo:使用迁移学习,通过 YOLOv5 实现小样本目标检测,只需极少的训练样本。请参阅我们逐步讲解的 wiki 教程。
- Deep Learning:在 NVIDIA Jetson Nano 上优化你的模型。点击 here 前往 Deci,自动基准测试并优化 NVIDIA Jetson Nano 和 Xavier NX 设备上的运行时性能
语音 AI
- Riva 是一个 GPU 加速的 SDK,用于构建针对你用例定制并可实现实时性能的语音 AI 应用。
远程车队管理
使用 allxon 启用安全的 OTA 和远程设备管理。使用代码 H4U-NMW-CPK 解锁 90 天免费试用。
机器人与 ROS 开发
- NVIDIA Isaac ROS GEMs 是硬件加速的软件包,使 ROS 开发者更容易在 NVIDIA 硬件上构建高性能解决方案。了解更多 NVIDIA Isaac 相关信息。
- Cogniteam Nimbus 是一款云端解决方案,可让开发者更高效地管理自主机器人。Nimbus 平台开箱即用地支持 NVIDIA® Jetson™ 和 ISAAC SDK 及 GEMs。查看我们的 webinar 了解如何使用 Nimbus 将你的 ROS 项目连接到云端。
技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,确保你在使用我们产品的过程中尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。