迷你 AI 计算机 T906 入门指南

迷你 AI 计算机 T906 搭载 Jetson AGX Orin 32GB 模块,可提供高达 200TOPS 的 AI 性能,为边缘端最复杂的 AI 工作负载做好准备。预装 Jetpack 5.0.2,支持 NVIDIA JetPack 和 DeepStream SDK、TensorRT、RIVA、Issac 软件库,以及来自 Seeed Edge AI 生态系统的领先 AI 平台工具,您可以轻松开发和部署用于制造、配送、零售、智慧城市等领域的 AI 应用。
您可以通过迷你 AI 计算机 T906 的 10GbE 和 1GbE 以太网端口访问高速网络。您可以启用多达 10 个视频分析流。
内置载板还为 GPS 模块预留了接口,以及用于扩展 SSD 的 M.2 Key M、用于 wifi 模块的 M.2 Key B、用于 5G 模块的 M.2 Key E、用于 4G 模块的 Mini PCIe。
配备 3x RS232 并受到出色散热和外壳保护,T906 是构建节能自主机器的理想选择。
凭借高达 10 千兆以太网和超长 MTBF 稳定运行,这台超级计算机使高级分析成为可能,同时提供处理来自数十个 IP 摄像头等多个同步流的能力。它具有 Wi-Fi 无线功能,支持蓝牙、4G 和 5G 模块配置,以及 GPS 导航。
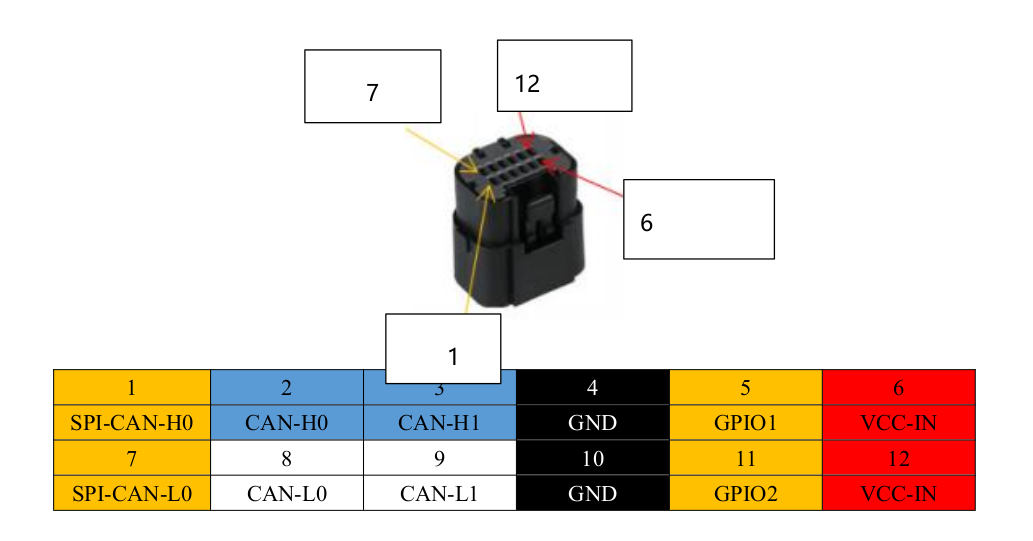
配备 JEG 车规级连接器,其中有 3x CAN FD 和 2x GPIO,您可以输入多个雷达传感器。它还安装了 GMSL 摄像头连接器,您可以利用它构建摄像头传感器集线器、控制单元或视频转码单元。这个边缘 AI 盒子可以实现自动驾驶、自主移动机器人 (AMR) 或无人地面车辆的远程操作。
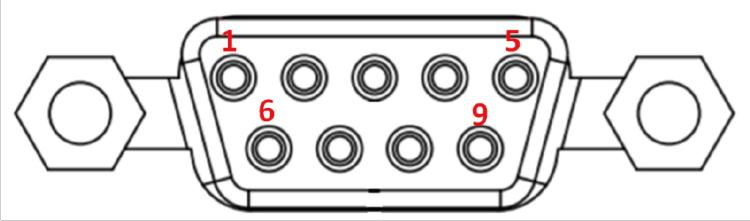
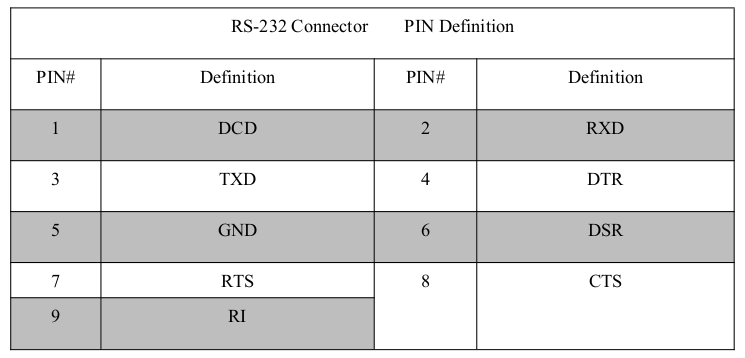
它配备了丰富的工业接口:1x 标准 RS232、1x 用于 UART 的 RS232 和 1x 用于时间同步触发的 RS232。
采用超强轻质铝合金覆盖,设计为 IP55 高防护等级,采用被动散热设计,配备两个板载风扇以实现强大的冷却功能。预装 Jetpack 5.0.2,这个出色的计算平台已准备好部署在无人清洁车、无人配送车、智能巡检、AGV 和其他无人驾驶领域。
特性
- 内嵌 NVIDIA® JETSON AGX ORIN™
- 支持 M.2 KEY M (PCIEX4 NVME 2280)
- 支持 M.2 KEY E (PCIEX1 2230)
- 支持 8 个 GMSL2 摄像头*(GMSL2 适配器板需单独购买)
- 支持多种接口(如 CAN/USB/以太网/同步信号/串行/GPIO 等)
- 支持双频 WIFI/蓝牙/4G/5G 模块
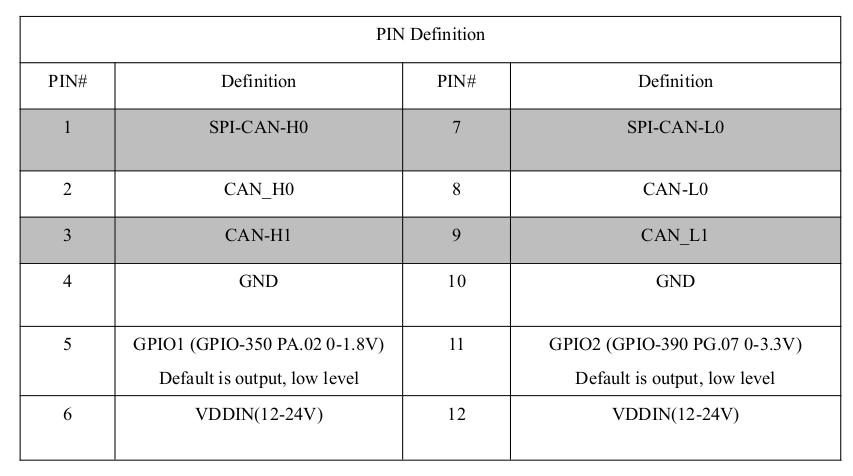
- 日本 JAE 汽车级 IO 插头(1个电源,3个CAN,2个GPIO)
- 风扇和被动散热设计
- 内置 ubuntu 20.04 系统和 JETPACK SDKS
规格参数
模块 | Jetson AGX Orin 32GB |
AI 性能 | 200 TOPS |
CPU | 8核 Arm® Cortex®-A78AE v8.2 64位 CPU 2MB L2 + 4MB L3 |
GPU | 1792核 NVIDIA Ampere 架构 GPU,配备 56 个 Tensor 核心 |
内存 | 32GB 256位 LPDDR5 204.8GB/s |
存储 | 64GB eMMC 5.1 1 x m.2 key m nvme 2280 连接器 |
显示 | 1*HDMI Type A |
视频编码 | 1x 4K60 (H.265) 3x 4K30 (H.265) 6x 1080p60 (H.265) 12x 1080p30 (H.265) |
视频解码器 | 1x 8K30 (H.265) 2x 4K60 (H.265) 4x 4K30 (H.265) 9x 1080p60 (H.265) 18x 1080p30 (H.265) |
千兆以太网 | 1x 10GbE 1x 1GbE |
Wifi/蓝牙 | 1x M.2 KEY B (2230) 支持 WiFi/蓝牙 1x M.2 KEY E 支持 5G 1x mini PCIe 用于 4G (不包含模块) |
GPS | 支持 GPS(不包含模块) |
USB | 4x USB 3.0 Type A 连接器; 1x USB 2.0 TYPE-C 端口用于设备模式; 1x USB 2.0 TYPE-C 端口用于调试 |
工业接口 | 3x CAN(带 CAN 芯片) |
2xGPIO | |
2x RS-232 D-SUB9 1 x时间同步(RS232) | |
摄像头 | GMSL 2 摄像头连接器(兼容GMSL1,需要单独购买适配板) |
RTC | RTC连接器,带可充电电池 |
风扇 | 2* 风扇 |
LED | 2个状态指示LED |
按键 | 电源键 复位键 恢复键 |
操作系统 | JetPack 5.0.2 |
电源 | 9-36v JAE(MX23A12SF1) 典型功耗45W 最大75W |
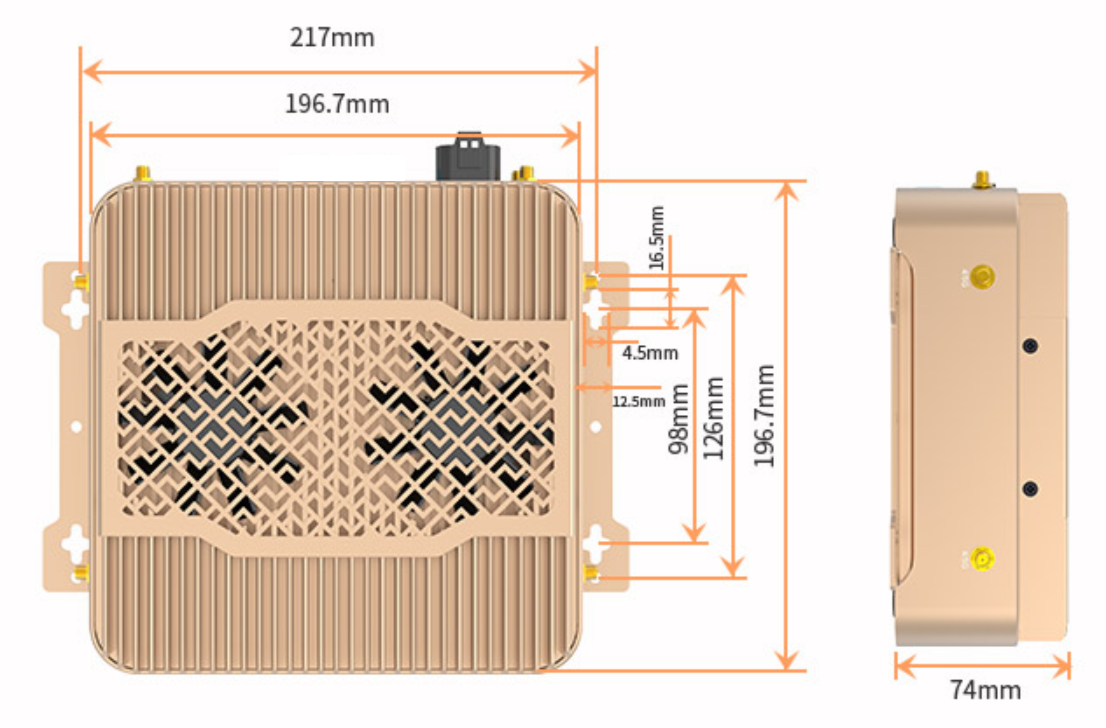
机械 | 196.719674mm 2.5kg -20℃-55℃ |
硬件概述


尺寸
硬件描述
串口
多功能接口
刷写操作系统
!!! Note Mini AI Computer T906 将预装 Jetpack 5.0.2 在 Jetson AGX Orin 模块的 EMMC 上,这意味着您可以直接开始开发自己的应用程序。您可以跳转到下一节。 如果您想要为此设备刷写操作系统,需要注意的是该系统的载板是定制设计的,因此需要下载并安装相关驱动程序。
所需硬件
在开始之前,您需要准备以下硬件
- 运行 Ubuntu 18.04 OS 或 Ubuntu 20.04 OS 的 Linux 主机
- Mini AI Computer T906
- 电源适配器(已提供)
- 键盘和鼠标
- 1 x USB Type-C 线缆(已提供)
将 Mini AI Computer T906 设置为恢复模式
-
步骤 1. 将 Mini AI Computer T906 连接到系统电源;
-
步骤 2. 使用 USB Type-C 线缆将 Mini AI Computer T906 连接到 Ubuntu 主机(一端插入 Mini AI Computer T906 的 OTG 端口,另一端插入 Ubuntu 主机的 USB 3.0 接口)。
-
步骤 3. 使用 Mini AI Computer T906 配置的电源为系统供电。
-
步骤 4. 按下恢复按钮,然后按住 Mini AI Computer T906 上的复位按钮。
-
步骤 5. 2 秒后释放复位按钮,最后释放恢复按钮,此时 T906 进入恢复模式(您可以通过在 Ubuntu 主机上运行命令:
lsusb来检查是否有Nvidia Corp设备)。
!!! Note 进入 USB 恢复模式时,系统将不会启动,串口也不会有调试信息输出。
下载并刷写操作系统到 Mini AI Computer T906
-
步骤 1. 从我们的 Source Forge 仓库 下载系统镜像文件
-
步骤 2. 在您的 Ubuntu 主机的
终端中执行以下命令:
#extract archive
sudo tar -zxvf T906_JP5.0.2.tar.gz
#Enter the L4T folder
cd Linux_for_Tegra
#Start Flashing OS
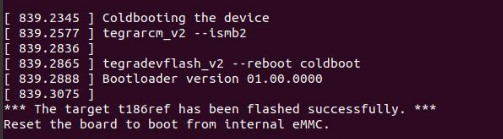
sudo . /flash.sh jetson-agx-orin-devkit mmcblk0p1
您应该在 Terminal 输出中看到类似的消息。
外设
Wi-Fi 连接
!!! Note Mini AI Computer T906 不包含 WiFi 模块。
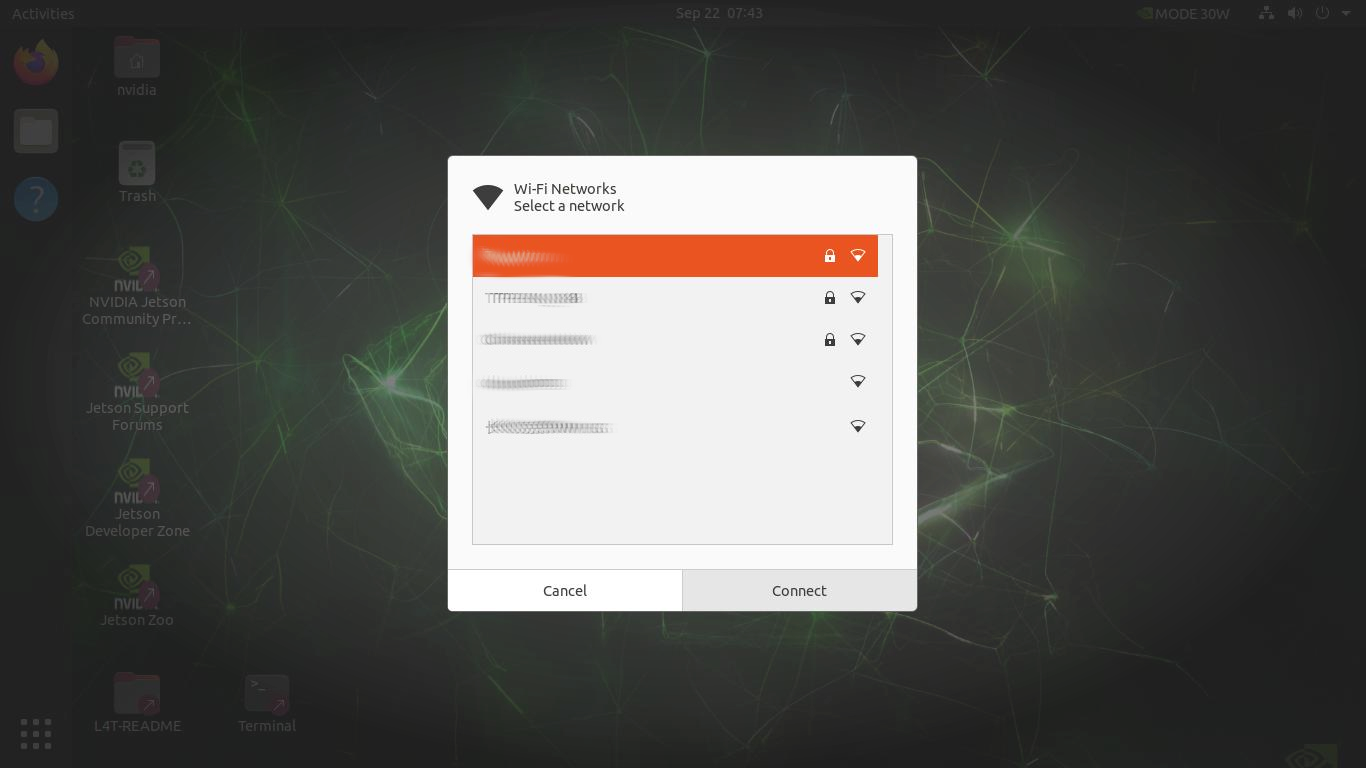
- 步骤 1. 启动进入系统后,请点击箭头所示的网络图标,将出现网络设置。
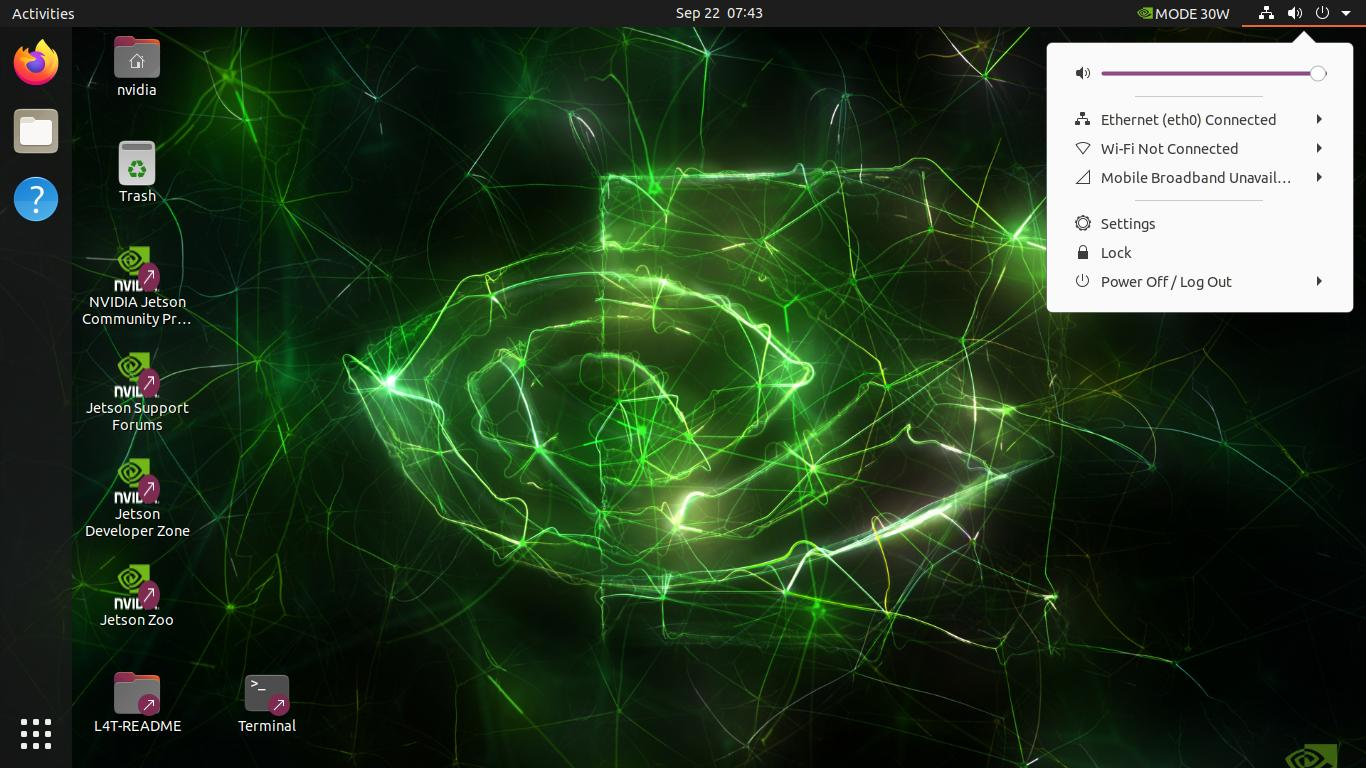
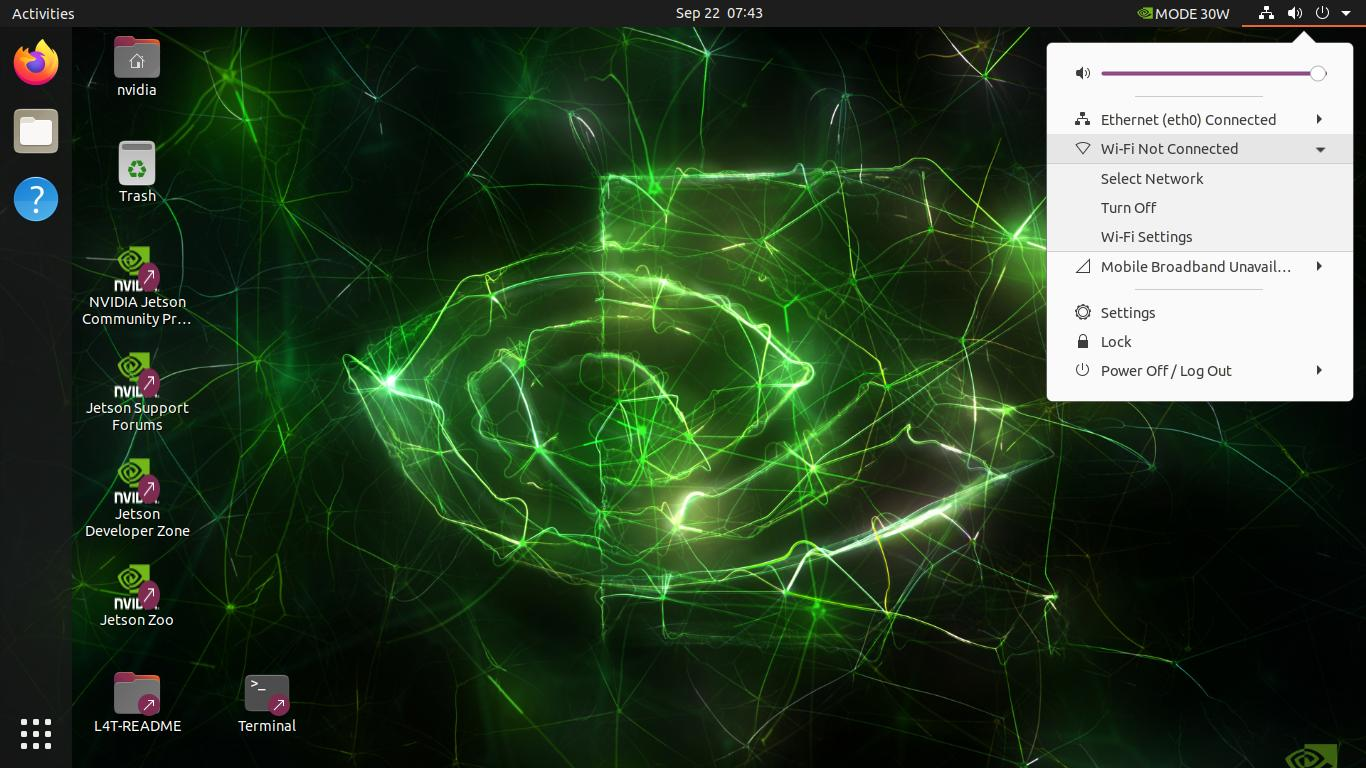
- 步骤 2. 在 Wi-Fi 部分,请选择并点击
Select Network。
- 步骤 3. 在提示窗口中选择您的 Wi-Fi 网络并点击
connect。
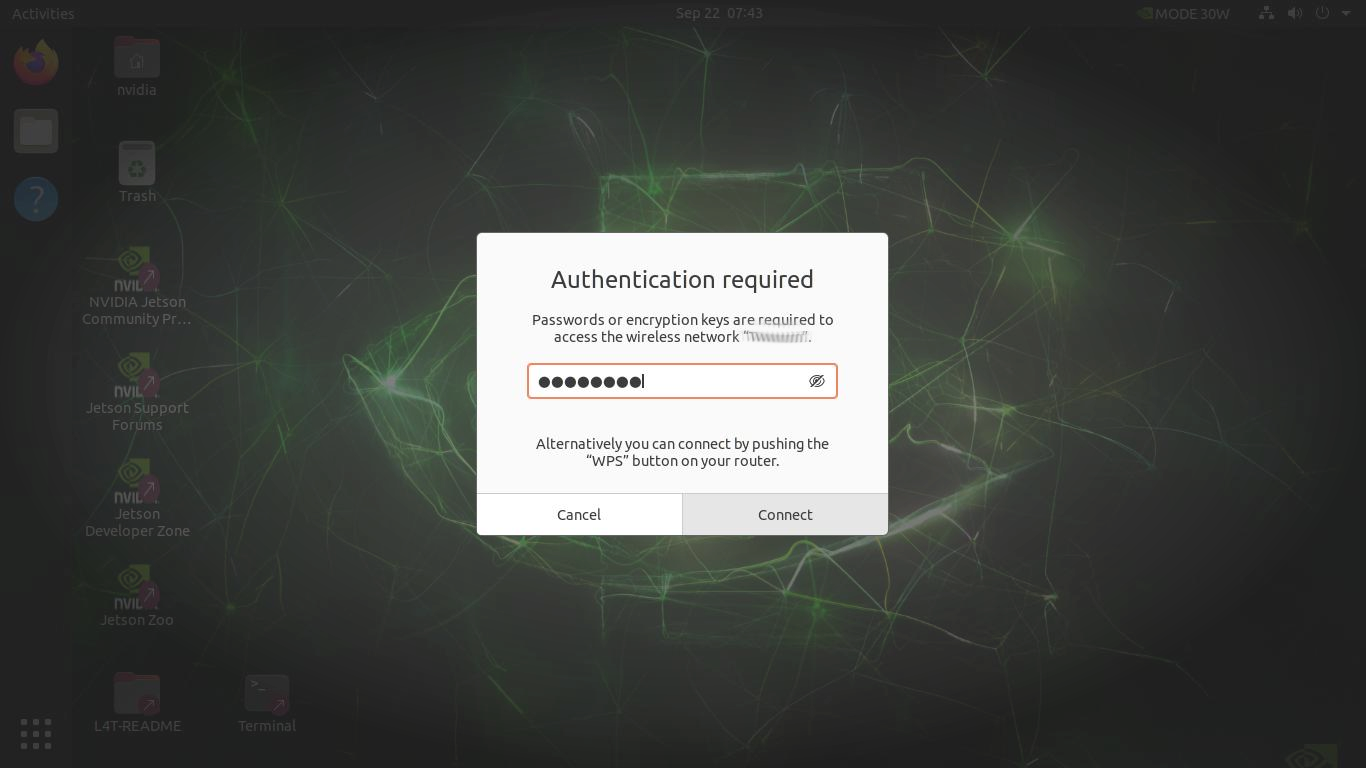
- 步骤 4. 请在
Authentication required窗口中输入 Wi-Fi 密码。
4G 拨号网络
!!! Note Mini AI Computer T906 不包含 4G 模块,以下程序使用 Neoway N720 4G 模块执行。
- 步骤 1. 请下载 4G 模块驱动程序并解压包,然后使用
Terminal将驱动程序复制到/etc/ppp/peers:
wget -o- https://files.seeedstudio.com/wiki/AI_Computer_T906/4g_dail.zip
unzip 4g_dail.zip
sudo cp -f 4g_dail_script/* /etc/ppp/peers
- 步骤 2. 进入 /etc/ppp/peers 目录并找到 n720-ppp-dial.sh 脚本。第一次执行时,您需要授予执行权限,如下所示。
cd /etc/ppp/peers
sudo chmod +x n720-ppp-dial.sh
sudo ./n720-ppp-dial.sh
如果你需要关闭拨号连接,你可以运行 ppp-kill.sh 脚本来终止它。
cd /etc/ppp/peers
#turn off dial-up
sudo ./ppp-kill.sh
-
步骤 3. 如果您想要实现 4G 自动连接功能,您需要设置 rc.local 启动脚本以在系统启动时增加应用程序的数量。
-
步骤 3-1. 添加 rc-local.service
#create a system service
sudo ln -fs /lib/systemd/system/rc-local.service /etc/systemd/system/rc-local.service
#edit the service file
sudo vi /etc/systemd/system/rc-local.service
在 vi 编辑器中,输入 i,然后请输入以下内容:
[Install]
WantedBy=multi-user.target
Alias=rc-local.service
然后输入 :wq 保存并退出。
- 步骤 3-2. 编写 rc.local 脚本
sudo touch /etc/rc.local
sudo chmod 755 /etc/rc.local
sudo vi /etc/rc.local
在 vi 编辑器中,输入 i 然后使用 control+shift+V 或粘贴以下脚本:
#!/bin/bash
LOG_DIR=/var/log/4glog
mkdir -p $LOG_DIR
#4g auto dial if register on network. sleep 30s wait for 4g module prepared
TIME=`date +%Y%m%d%H%M`
echo $TIME >> $LOG_DIR/ppp-dial.log
echo "Auto dial" >> $LOG_DIR/ppp-dial.log
nohup /etc/ppp/peers/n720-ppp-dial.sh >> $LOG_DIR/ppp-dial.log &
sleep 10
#Set default gateway
def_gw=`/sbin/ifconfig ppp0|grep destination|grep -v 127.0.0.1|grep -v inet6 | awk '{print $6}' | tr -d "addr:"`
#`route -n | grep ppp0 | grep UG | awk '{print $2}'`
echo $def_gw >> $LOG_DIR/ppp-dial.log
if [ -n "$def_gw" ]; then
#Set default gateway using ppp0/4G
sudo route add default gw $def_gw
else
sleep 10
def_gw=`/sbin/ifconfig ppp0|grep destination|grep -v 127.0.0.1|grep -v inet6 | awk '{print $6}' | tr -d "addr:"`
if [ -n "$def_gw" ]; then
sudo route add default gw $def_gw
fi
fi
#Get ppp0 IP
fourg_ip=`/sbin/ifconfig ppp0|grep inet|grep -v 127.0.0.1|grep -v inet6 | awk '{print $2}' | tr -d "addr:"`
if [ -n "$fourg_ip" ]; then
echo $fourg_ip >> $LOG_DIR/ppp-dial.log
else
sleep 15
if [ -n "$fourg_ip" ]; then
echo $fourg_ip >> $LOG_DIR/ppp-dial.log
else
echo "4G no ip $fourg_ip" >> $LOG_DIR/ppp-dial.log
echo $TIME"-Kill pppd and redial" >> $LOG_DIR/ppp-kill.log
nohup /etc/ppp/peers/ppp-kill.sh >> $LOG_DIR/ppp-kill.log &
fi
fi
#end 4g auto dial
#Running maxn mode
/usr/bin/jetson_clocks
exit 0
现在您可以打开网页来测试并查看4G网络是否已连接。
GPIO 测试
- 步骤 1. 安装gpio python库
git clone https://github.com/vitiral/gpio.git
cd gpio/
sudo python3 setup.py install
- 步骤 2. 编写一个测试 Python 脚本
import time
import gpio
tst_gpio_pin = 326 #326 correspond to T906's GPIO2
#tst_gpio_pin = 350 #350 correspond to T906's GPIO1
gpio.setup(tst_gpio_pin, gpio.OUT)
gpio.set(tst_gpio_pin, 0)
print("Starting now! Press CTRL+C to exit")
try:
while True:
gpio.set(tst_gpio_pin, 1)
print("TEST High.")
time.sleep(5)
gpio.set(tst_gpio_pin, 0)
print("TEST Low")
time.sleep(5)
finally:
gpio.cleanup()
- 步骤 3. 你也可以通过以下方式检查 GPIO 引脚是否处于 HI 或 LO 状态:
sudo cat /sys/kernel/debug/gpio| grep '326'
GPS 使用
!!!Note 这是使用 GPS 模块进行测试的步骤,以下程序和软件适用于 HX-26-GN 系列 GPS 模块,请注意 GPS 模块不包含在标准产品中,您需要自行提供。
- 步骤 1. 请安装 GPS 模块并将 GPS 天线连接到 GPS 端口。

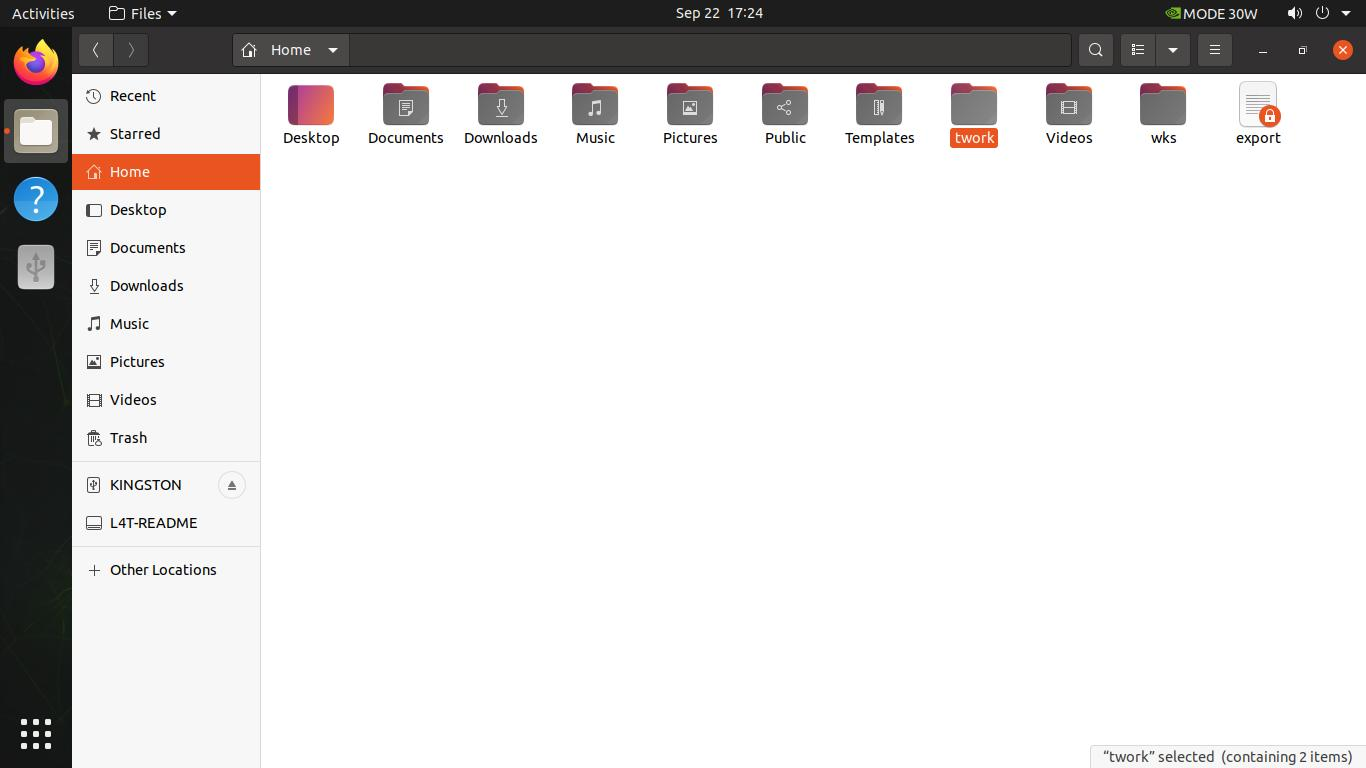
- 步骤 2. 系统启动后,您可以在主目录位置找到 twork 文件夹,双击进入并右键单击鼠标按钮,选择
Open in Terminal。
- 步骤 3. 在
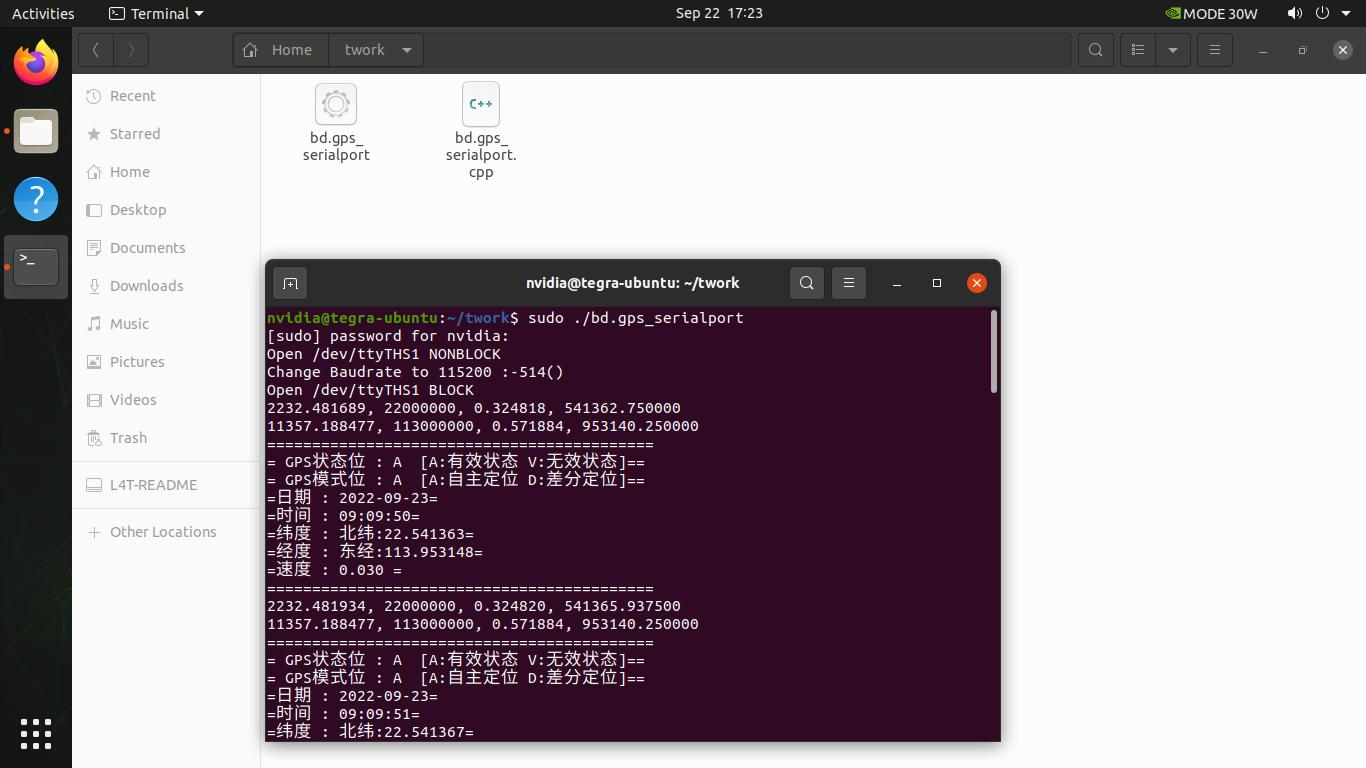
Terminal窗口中,请输入以下命令:
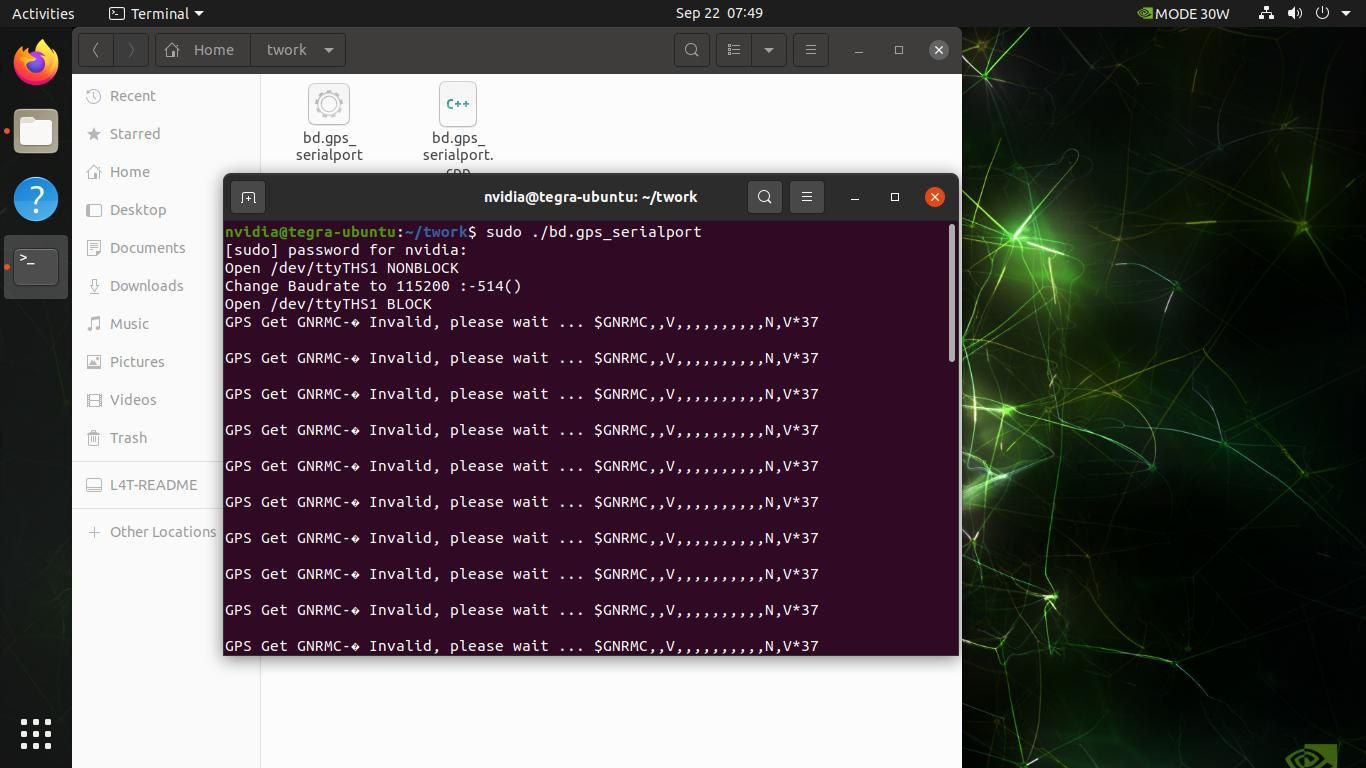
sudo ./bd.gps_serialport
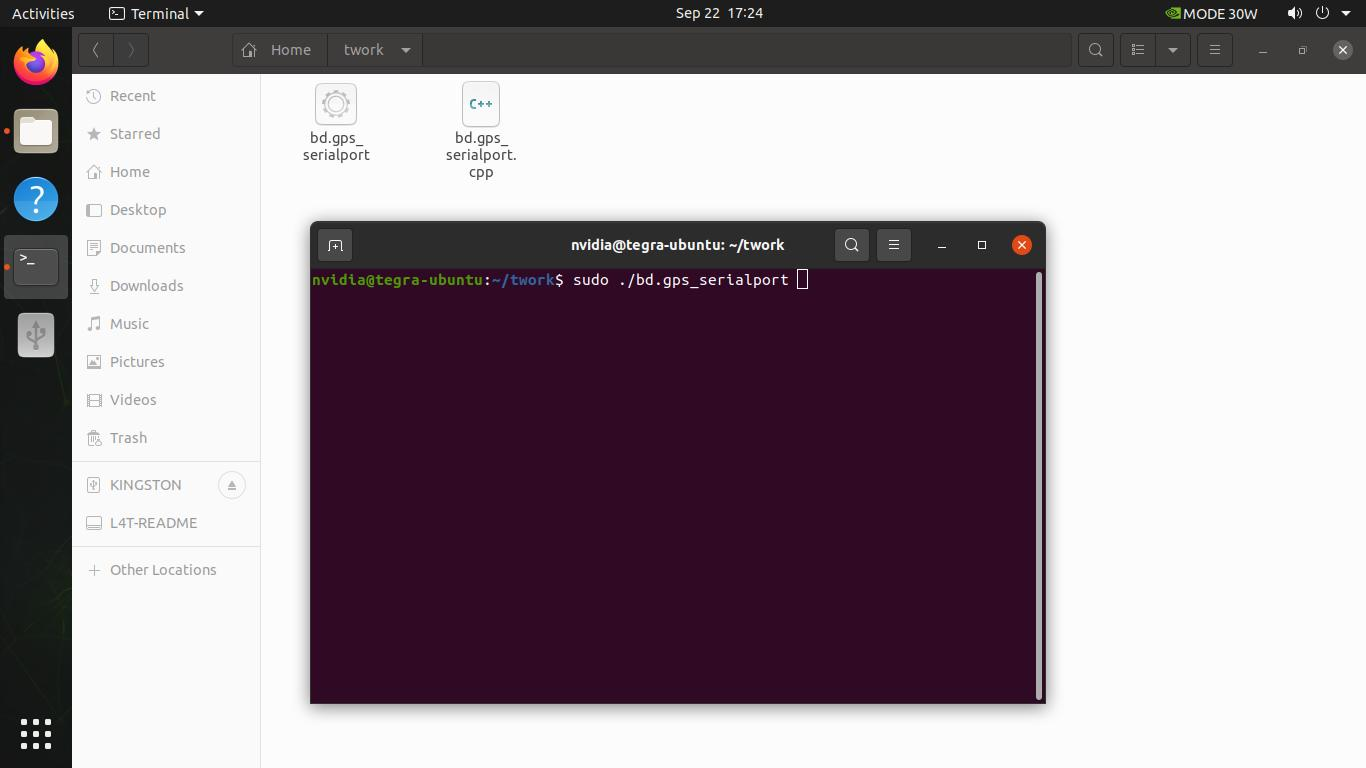
正确的结果应该类似于:
如果您看到以下输出,这意味着定位不成功,可能是信号太弱无法锁定位置,请前往开阔区域将设备暴露在外以获得更多信号来锁定位置。
使用 NVMe SSD 作为系统根文件系统驱动器
!!!Note 这是将 NVMe SSD 设置为系统磁盘以扩展根文件系统存储大小的步骤,同时将 EMMC 或 SD 卡作为系统启动分区。请注意 NVMe SSD 不包含在标准产品中,您需要自行提供。
-
步骤 1. 安装 SSD
按照硬件说明中的步骤为 reComputer 安装 SSD。
-
步骤 2. 准备 SSD
使用快捷键
Ctrl+F或点击左上角的 Ubuntu 图标搜索 Disks 并打开 Ubuntu 18.04 自带的磁盘工具。
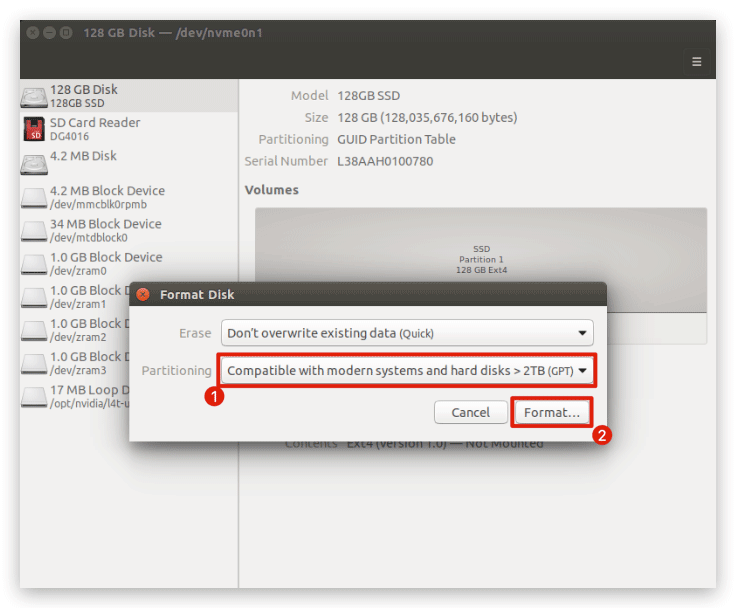
在左侧选择您的 SSD,然后在菜单栏右上角选择 Format Disk。
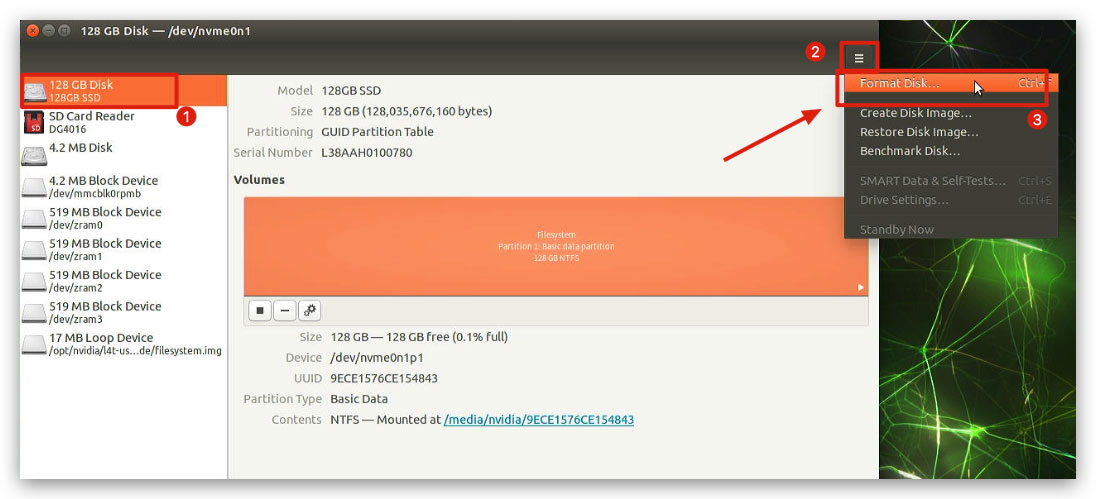
将您的 SSD 格式化为 GPT 格式。会出现一个弹出窗口要求您确认并输入用户密码。
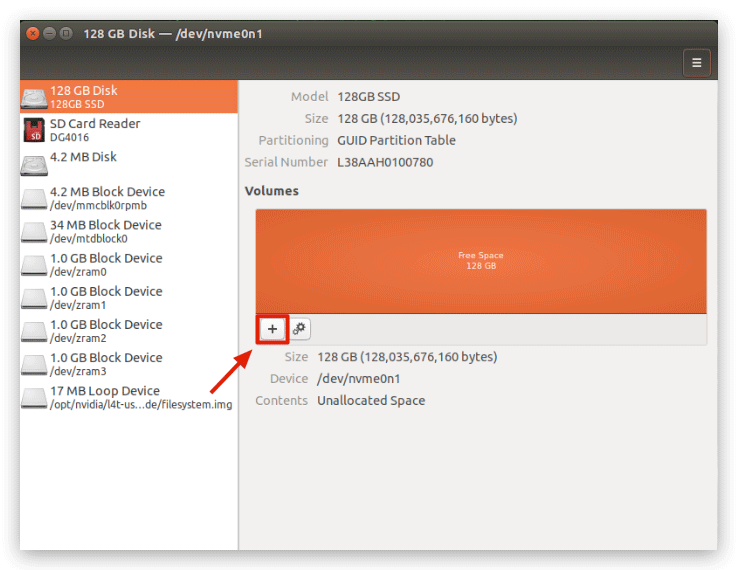
然后,我们点击中间的 + 来添加磁盘字符。
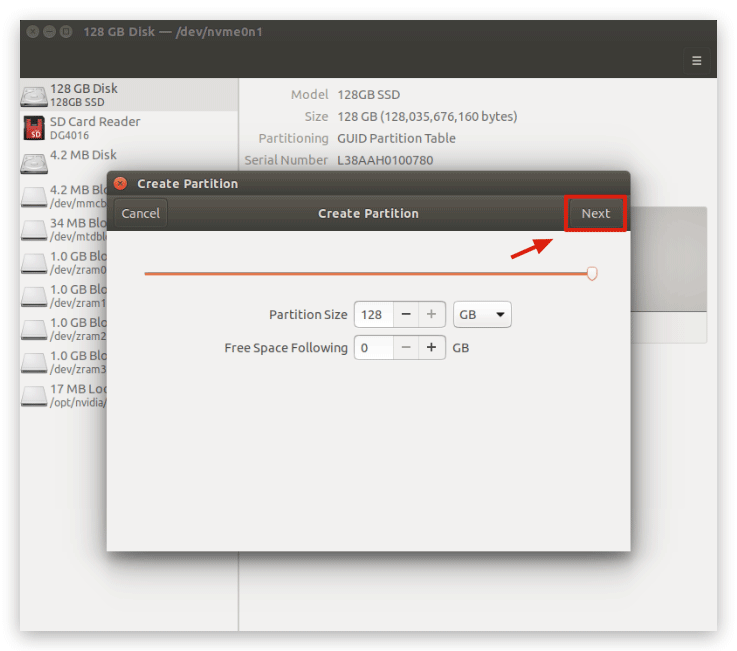
点击"Next"。
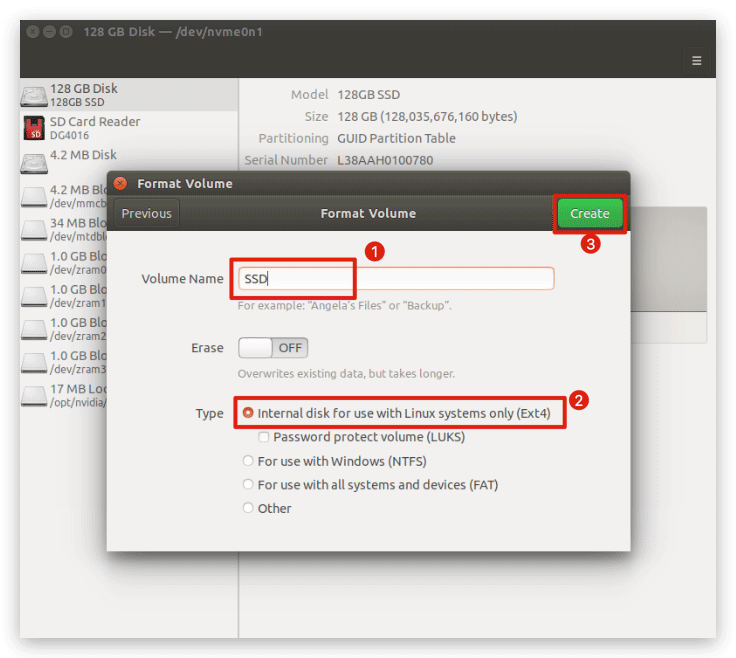
请为您的 SSD 命名,在类型中选择 Ext4 并点击"Create"。此时我们已经根据扩展要求完成了 SSD 的准备工作。
-
步骤 3. 将根目录构建到 SSD
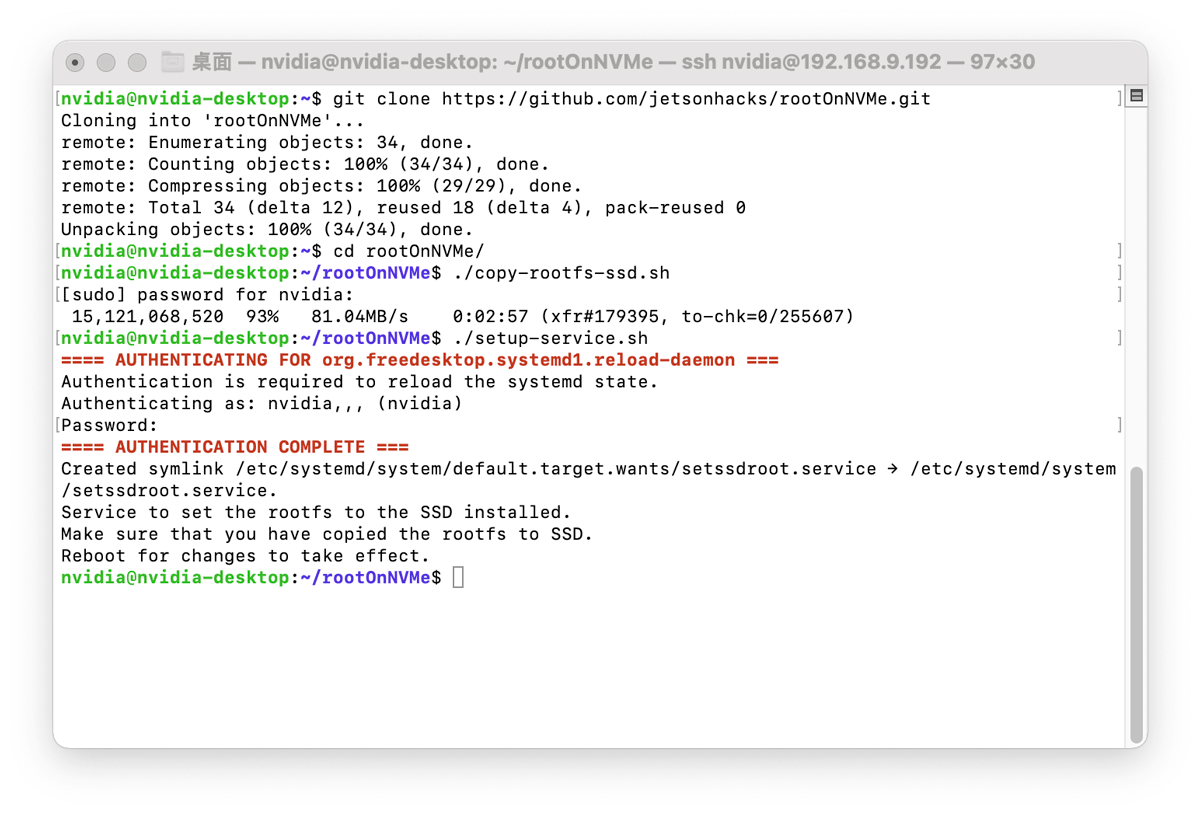
使用 git 命令下载我们需要在 reComputer 上使用的脚本文件。
git clone https://github.com/limengdu/rootOnNVMe.git
cd rootOnNVMe/
然后执行以下命令将文件从 eMMC 中的根目录构建到 SSD,此步骤的等待时间取决于您使用的根目录的大小。
./copy-rootfs-ssd.sh
-
步骤 4. 配置环境并完成扩展
执行以下命令完成 rootfs 的配置。
./setup-service.sh
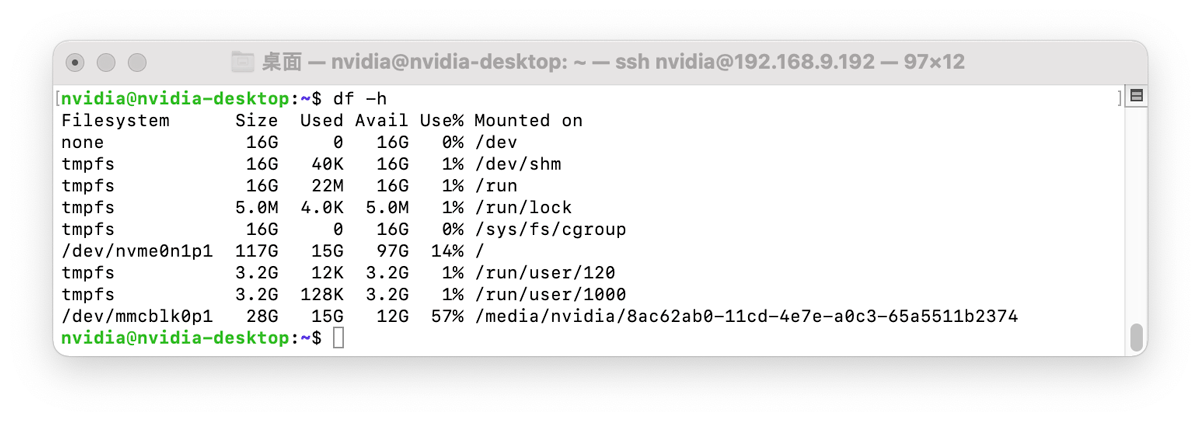
当您重启 reComputer 时,您会看到 eMMC 已经成为主界面上的外部存储设备,并且您会看到系统占用空间已经减少,因此扩展成功了。
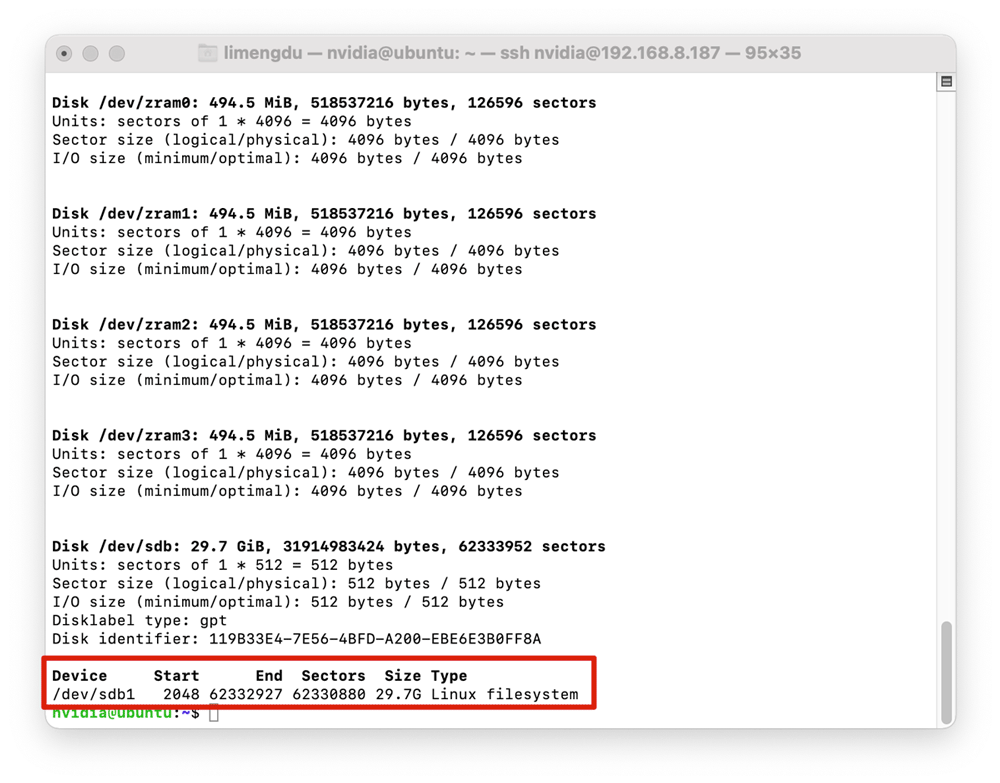
!!!Attention
脚本文件中的默认 SSD 路径是 /dev/nvme0n1p1,这也是 reComputer 默认分配的路径。如果您使用命令 sudo fdisk -l 发现您的 SSD 路径与此不匹配,请将 rootOnNVMe 中的文件 copy-rootfs-ssd.sh、data/setssdroot.service 和 data/setssdroot.sh 中所有 /dev/nvme0n1p1 的路径更改为您的 SSD 所在的路径。
上述扩展不会从 eMMC 中删除原始根目录内容。如果您不想从 SSD 启动,您可以移除 SSD,系统仍将从 eMMC 启动。
资源
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。