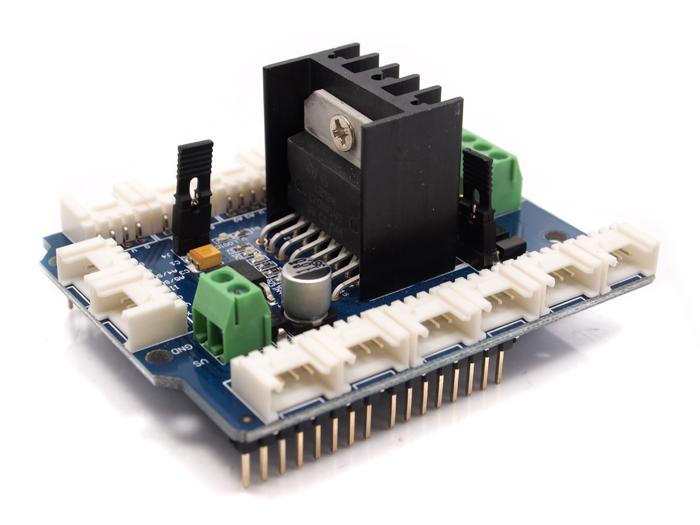
电机扩展板 V1.0
电机扩展板是机器人和机械应用的完美平台。它使Arduino能够驱动两个有刷直流电机或一个4线两相步进电机。基于H桥驱动芯片L298N电机驱动集成电路,它需要6V至15V电源来为电机供电,还包括一个板载5V电压调节器来为主Arduino板供电。额外的即插即用Grove传感器可以连接到13个板载Grove连接器上。
型号:SLD80256P
特性
-
标准Arduino兼容
-
脉宽调制速度控制模式
-
4个方向指示灯
-
兼容Grove即插即用传感器
-
超大散热器有助于处理大负载
-
支持多达14个舵机
注意:
当工作电流超过1000mA时,驱动IC和散热器可能会变得非常热。
规格参数
| 项目 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 逻辑控制电压 | 4.5 | 5 | 5.5 | V |
| 电机供电电压 | 6 | / | 15 | V |
| 输出电压 | 0 | / | Vinput - 1 | V |
| 输出电流(每个通道) | / | / | 2000 | mA |
| 输出占空比范围 | 0% - 100% | / | ||
| 尺寸 | 68.5×54.5×29.5 | mm | ||
| 净重 | 37 | g |
- 建议满载时最大占空比<50%
接口功能

外部电源插孔: 电机扩展板的外部电源供应。
电机接口: Out 1和Out 2(Out 3和Out 4)可以连接电机A(B)用于直流电机。
使能电机A连接器: 驱动直流电机A时,用跳线帽连接上述两个接口。
使能电机B连接器: 驱动直流电机B时,用跳线帽连接下述两个接口。
供电选择连接器: USB/外部电源可以为驱动电机供电。当使用跳线帽连接连接器时,USB为电机扩展板供电。
下表描述了电机A/B指示LED。
| 指示灯 | 描述 |
|---|---|
| IN1_红色 | 电机A顺时针转动时点亮,out1引脚输出高电平 |
| IN2_绿色 | 电机A逆时针转动时点亮,out2引脚输出高电平 |
| IN3_红色 | 电机B顺时针转动时点亮,out3引脚输出高电平 |
| IN4_绿色 | 电机B逆时针转动时点亮,out4引脚输出高电平 |
| 引脚名称 | 方向 | 连接到Arduino | 描述 |
|---|---|---|---|
| VCC | / | VCC | 电源选择器 |
| VS, GND | / | / | 电机电源供应,6V - 15V |
| EA | 输入 | D9 | 桥A的TTL兼容使能输入 |
| EB | 输入 | D10 | 桥B的TTL兼容使能输入 |
| IN1 | 输入 | D8 | 桥A的TTL兼容输入 |
| IN2 | 输入 | D11 | 桥A的TTL兼容输入 |
| IN3 | 输入 | D12 | 桥B的TTL兼容输入 |
| IN4 | 输入 | D13 | 桥B的TTL兼容输入 |
| M1-, M1+ | 输出 | / | 桥A的输出 |
| M2-, M2+ | 输出 | / | 桥B的输出 |
使用方法
硬件安装
将直流电机连接到电机扩展板输出引脚 M1+ 和 M1-(M2+ 和 M2-),如果使用 4 线步进电机,请确保 4 个引脚正确连接。将驱动电压(所需电压取决于所使用的电机。请参考电机数据手册)连接到电源供电端子。

插入跳线 J4 后,Arduino 可以通过板载电压调节器由驱动电压供电,该调节器将驱动电压调节至 5v。
软件
下载 电机扩展板演示代码 并打开 Motor_shield_demo_code 示例。在 tools-boards 中选择相应的 Arduino 开发板,在 tools-serial port 中选择串口。

将示例上传到您的 arduino 开发板,然后您会发现 2 个电机开始工作。如果您通过电源端子为电机扩展板供电并且电源跳线 J4 已插入,您现在可以移除 USB 电缆。
速度控制通过传统的 PWM 实现,可以从 Arduino 的 PWM 输出 D9(EA) 和 D10(EB) 获得。使用函数 analogWrite() 生成驱动 PWM:
int speedpinA=9;//enable motor A
int speedpinB=10;//enable motor B
int speed =127;//define the speed of motor
......
analogWrite(speedpinA,speed);//AnalogWrite to Generate PWM to control the motor speed
analogWrite(speedpinB,speed);
设置数字引脚 D8(IN1) 和 D11(IN2) 来控制连接到 OUT1/2 的电机,而数字引脚 D12(IN3) 和 D13(IN4) 控制连接到 OUT3/4 的电机。
int pinI1=8;//define I1 interface
int pinI2=11;//define I2 interface
......
digitalWrite(pinI2,HIGH);//turn DC Motor A move clockwise
digitalWrite(pinI1,LOW);
遵循 EA(B) 和 INx 与电机运动之间的逻辑:
| EA(B) | IN1(IN3) | IN2(IN4) | 电机A(B)的运动 |
|---|---|---|---|
| 0 | x | x | 停止 |
| 1 | 0 | 0 | 停止 |
| 1 | 0 | 1 | 顺时针 |
| 1 | 1 | 0 | 逆时针 |
| 1 | 1 | 1 | 停止 |
/*
SEEED Studio 步进电机控制 - 一圈旋转
将步进电机示例适配用于 SEEED STUDIO 电机扩展板。
该程序通过使用 Arduino 包含的步进电机库来驱动单极或双极步进电机。
电机连接到 Seeed Studio 电机扩展板和 Arduino。
数字引脚 8,11,12,13 驱动 L298N 并在创建步进电机对象时使用
数字引脚 9 和 10 必须为高电平以启用芯片。
电机应该在一个方向旋转一圈,然后
在另一个方向旋转一圈。
创建于 2007年3月11日
修改于 2009年11月30日
作者 Tom Igoe
修改于 2012年7月4日
作者 R. Dumouchelle
*/
#include <Stepper.h>
const int stepsPerRevolution = 200; // 更改此值以适合您的电机每转的步数
// 在引脚 8 到 11 上初始化步进电机库:
Stepper myStepper(stepsPerRevolution, 8,11,12,13);
void setup() {
// 设置速度为 60 rpm:
myStepper.setSpeed(60);
// 初始化串口:
Serial.begin(9600);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
digitalWrite(9,HIGH);
digitalWrite(10,HIGH);
}
void loop() {
// 在一个方向步进一圈:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// 在另一个方向步进一圈:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
}
版本跟踪
| 修订版本 | 描述 | 发布日期 |
|---|---|---|
| v1.0 | V1.0 发布 | 2012/3/29 |
相关项目
电机扩展板 V2.0 演示

这是一个关于如何使用 Seeedstudio 2.0 电机扩展板单独控制电机的教程。
原理图在线查看器
资源
- [数据手册] L298数据手册
- [EAGLE] 电机扩展板 eagle 文件
- [PDF]电机驱动器 pcb
- [PDF]电机驱动器原理图
- [代码] 电机扩展板演示代码
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。