24GHz mmWave 传感器 - 人体静态存在模块 (MR24HPB1)
简介
人体静态存在雷达传感器是一个自包含、隐私保护、安全的 mmWave 模块,工作频率为 24GHz。凭借增强的英飞凌多普勒雷达和标准算法,该模块是智能家居、智能酒店和危险报警等个人应用的理想解决方案。
应用
- 智能家居
特性
- 可靠技术:英飞凌 mmWave FMCW 工业雷达
- 启用理论:应用多普勒雷达技术,配备近距离传感器 (NDS),工作频率为 24GHz
- 标准算法:在自适应环境中区分有人/无人状态并识别人体活动
- 完美隐私保护:提供监控功能而无需身份识别
- 灵活安装位置:无论遮挡物如何都能正常工作
- 无害工作状态:输出 10 dBm 无害能量功率
- 高精度:减少非生物物体的干扰,输出结果准确率超过 95%
- 高鲁棒性:在包含不同温度、湿度、噪音、气流、灰尘、光线等复杂环境中保持正常功能
- 高性能天线:在扇形波束模式中感知微动,水平 90°/垂直 60°
- 测量距离:
- 运动感知最大距离:最远 12 米
- 微动感知最大距离:最远 5 米
- 人体感知最大距离:最远 3 米
- 检测时间:
- 无人到有人状态:0.5 秒内
- 有人到无人状态:1 分钟以上
- 可定制雷达:支持二次开发,包括雷达参数、协议、天线、功能
硬件概述

- S1 输出:高电平 - 有人,低电平 - 无人。
- S2 输出:高电平 - 活跃,低电平 - 静止
- GP1 到 GP4 是参数选择控制,可根据用户需求重新定义。
- 此接口的输出信号均为 3.3V 电平。
产品功耗为 500mW,不适合长期供电。
特征

入门指南
Arduino 库概述
如果这是您第一次使用 Arduino,我们强烈建议您参考 Arduino 入门指南。
本示例中使用的库代码可以通过点击下面的图标下载。
在我们开始开发草图之前,让我们先看看库的可用函数。
-
void recvRadarBytes()—— 此函数获取雷达返回的当前帧长度。帧根据该长度存储在数组中。 输入参数: 无 返回值: 无 -
void Bodysign_judgment(byte inf[], float Move_min, float Move_max)—— 雷达返回的数据包含大量物理数据。用户可以根据符号数据和函数提供的解码算法灵活调整检测到的运动信息。判断内容将通过串口输出。 输入参数:-
byte inf[]—— 雷达发送的数据帧。 -
float Move_min—— 确定用户处于静止或无人状态的阈值。 -
float Move_max—— 确定用户处于静止状态或有人运动状态的阈值。返回值: 无 关于符号参数的描述:理论上,符号参数的计算值范围为 0 到 100。当计算值为 0 时,表示周围环境中没有检测到人。当计算值为 1 时,表示检测到环境被占用且处于静止状态。计算值为 2 到 100 表示检测到周围被占用且活跃。
-
-
void Situation_judgment(byte inf[])—— 此函数根据雷达内部算法检测人体是否正在接近或远离雷达所在位置,并判断人体的运动。此信息将通过串口输出。 输入参数:-
byte inf[]—— 雷达发送的数据帧。返回值: 无
-
-
void Fall_inf(byte inf[])—— 此函数完成雷达返回的跌倒检测信息的解码,并通过串口打印雷达检测结果。 输入参数:-
byte inf[]—— 雷达发送的数据帧。返回值: 无
-
-
unsigned short int us_CalculateCrc16(unsigned char *lpuc_Frame, unsigned short int lus_Len)—— 此函数用于生成 CRC16 校验和。 输入参数:-
unsigned char *lpuc_Frame—— 您要发送到雷达的数据帧(不包括最后的 2 字节校验和帧)。 -
unsigned short int lus_Len—— 您要发送到雷达的数据帧长度。返回值: 2 字节整数类型校验位。
返回值: 无
-
-
void SerialInit()—— 将雷达串口波特率设置为 9600。如果是 Seeeduino 板,将软串口设置为 RX: 2, TX: 3。 输入参数: 无 返回值: 无
安装
步骤 1. 您需要安装 Arduino 软件。

步骤 2. 启动 Arduino 应用程序。
步骤 3. 选择您的开发板型号并将其添加到 Arduino IDE。
-
如果您想在后续例程中使用 Seeeduino V4.2,请参考此教程完成添加。
-
如果您想在后续例程中使用 Seeeduino XIAO,请参考此教程完成添加。
-
如果您想在后续例程中使用 XIAO RP2040,请参考此教程完成添加。
-
如果您想在后续例程中使用 XIAO BLE,请参考此教程完成添加。
步骤 4. 安装 Arduino 代码库。
首先从 GitHub 获取代码库并下载到您的本地计算机。
由于您已经下载了 zip 库,打开您的 Arduino IDE,点击 Sketch > Include Library > Add .ZIP Library。选择您刚刚下载的 zip 文件,如果库安装正确,您将在通知窗口中看到 Library added to your libraries。这意味着库已成功安装。

所需材料
在完成以下示例之前,您需要准备以下材料。
|  |  |
| 24GHz mmWave 雷达传感器 | Seeed XIAO BLE nRF52840 Sense | 2mm 到 2.54mm 间距排线 |
步骤 1. 通过主板将设备连接到计算机。接线图如下表所示。
 | |||
| 雷达传感器 | 主板 | ||
| 5V | --> | 5V | |
| GND | --> | GND | |
| RX | --> | D6 | |
| TX | --> | D7 | |
步骤 2. 在 Arduino IDE 左上角的菜单栏中,选择 tool,选择您正在使用的开发板类型,并选择相应的串口。
如果您使用的是 MacOS,设备的串口名称通常以 /dev/cu.usbmodem xxx 开头,以设备名称结尾。如果您使用的是 Windows,设备的串口名称通常以 COM 开头,同样以设备名称结尾。

在这个示例中,我们将演示雷达如何与我们的热门产品 XIAO BLE 配合工作。
演示 1 使用特征参数分析获取人体运动
在雷达返回的大量数据中,物理数据信息占据了信息的大部分。有时,过度依赖雷达自身的算法在某些场景下可能产生不太令人满意的结果。那么,我们可以选择使用雷达返回的信息,根据实际应用场景进行适当的调整。
此示例中的代码如下。

//Physical_Parameters_Example.ino
#include <sleepbreathingradar.h>
SleepBreathingRadar radar;
void setup()
{
radar.SerialInit();
Serial.begin(9600);
delay(1500);
Serial.println("Readly");
}
void loop()
{
radar.recvRadarBytes(); //Receive radar data and start processing
if (radar.newData == true) { //The data is received and transferred to the new list dataMsg[]
byte dataMsg[radar.dataLen+1] = {0x00};
dataMsg[0] = 0x55; //Add the header frame as the first element of the array
for (byte n = 0; n < radar.dataLen; n++)dataMsg[n+1] = radar.Msg[n]; //Frame-by-frame transfer
radar.newData = false; //A complete set of data frames is saved
//radar.ShowData(dataMsg); //Serial port prints a set of received data frames
radar.Bodysign_judgment(dataMsg, 1, 15); //Output of human movement using sign parameters
}
}
radar.Bodysign_judgment(dataMsg, 1, 15);
一旦获得 dataMsg 数组,我们可以将此数组的数据作为第一个参数传递给 Bodysign_judgment() 函数,该函数解析体征参数。
函数 Bodysign_judgment() 的第二个和第三个参数分别是判断无人和人体静止的临界值,以及人体静止和运动的临界值。
(1, 15) 意味着当计算出的体征值小于 1 时,输出环境中无人。当体征值大于或等于 1 且小于 15 时,输出当前环境中有人处于静止状态。当体征值大于或等于 35 时,输出环境中有人在运动。
上传程序。将串口监视器的波特率设置为 9600 应该会显示结果。输出应该类似于下图。
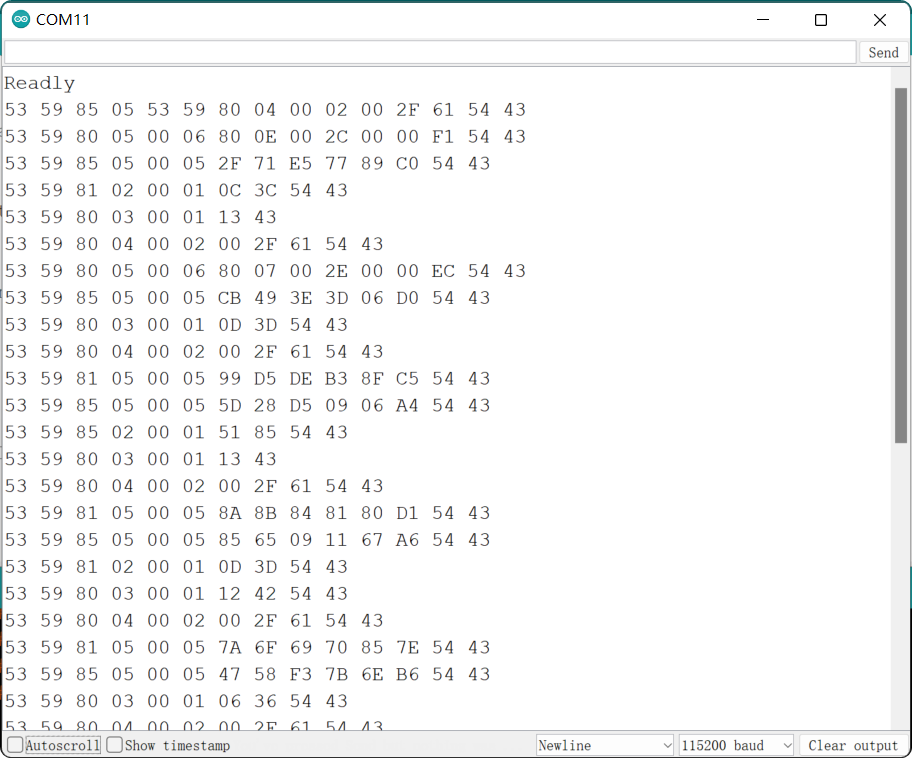
输出数据帧后面的数值代表计算出的体征值。
演示 2 向雷达发送数据
雷达为我们开放了大量的接口来获取信息以及设置雷达灵敏度或场景。此例程将指导用户如何使用用户手册向雷达发送数据消息,以调整雷达参数或获取所需的数据信息。
步骤 1. 根据所需查询获取数据帧。
在资源区域下载用户手册,在第 8.2 章中,找到您需要查询或设置的帧内容,并整理它们。
在此示例中,假设您想查询雷达设备的 ID,您应该能够获得所需的功能码、地址码 1 和地址码 2。

步骤 2. 在 Arduino IDE 中打开示例代码。

此示例中的代码如下。
//CRC_Checksum_Generation.ino
#include <sleepbreathingradar.h>
SleepBreathingRadar radar;
char buff[30];
void setup()
{
radar.SerialInit();
Serial.begin(9600);
delay(1500);
Serial.println("Readly");
}
void loop()
{
//Please fill in the data frame you want to set according to the datasheet(Excluding 2 Byte checksum frames)
unsigned char data[] = {0x55, 0x08, 0x00, 0x05, 0x01, 0x04, 0x03};
unsigned int length = sizeof(data)/sizeof(unsigned char);
unsigned char datas[length + 2];
for (int n = 0; n < length; n++)datas[n] = data[n];
unsigned short int crc_data = radar.us_CalculateCrc16(data, length);
sprintf(buff, "The CRC16 values is: %04x", crc_data);
Serial.println(buff);
datas[length] = (crc_data & 0xff00) >> 8;
datas[length+1] = crc_data & 0xff;
Serial.print("The datas send to the radar: ");
for (int n = 0; n < length + 2; n++){
char buffsend[1];
sprintf(buffsend, "0x%02x ", datas[n]);
Serial.print(buffsend);
}
Serial.println();
delay(6000);
}
步骤 3. 修改数据帧的内容以生成发送到雷达的完整数据帧。
我们需要修改的是循环中的 data[] 数组。
//Please fill in the data frame you want to set according to the datasheet(Excluding 2 Byte checksum frames)
unsigned char data[] = {0x55, 0x08, 0x00, 0x05, 0x01, 0x04, 0x03};
我们需要修改的地方是第二个元素、第四个到最后一个元素。帧头 0x55 是固定的,不需要修改。第二帧是长度帧,请根据您发送的数据长度进行修改。第三帧固定为 0x00。第四帧是功能码,第五帧是地址码 1,以此类推。
关于长度帧计算方法:
长度 = 数据长度 + 功能码 + 地址码 1 + 地址码 2 + 数据 + 校验和。(不计算帧头)
有关帧格式和规则的更多信息,请参阅用户手册第 8 章。
上传程序。将串口监视器的波特率设置为 9600 应该会显示结果。输出应该类似于下图。

需要发送到雷达的完整数据将在串口监视器中显示。
其他方法
如果您不想使用任何主控来生成完整的数据帧,您也可以将下面的代码粘贴到可以运行 C 程序的编辑器中。按照上述步骤,用您的帧内容填充数组数据。
#include <stdio.h>
const unsigned char cuc_CRCHi[256]= {
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40
};
const unsigned char cuc_CRCLo[256]= {
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7,
0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E,
0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9,
0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC,
0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32,
0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C, 0xFC, 0xFD, 0x3D,
0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A, 0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38,
0x28, 0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF,
0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1,
0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4,
0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F, 0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB,
0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA,
0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0,
0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97,
0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C, 0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E,
0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89,
0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83,
0x41, 0x81, 0x80, 0x40
};
static unsigned short int us_CalculateCrc16(unsigned char *lpuc_Frame, unsigned short int lus_Len){
unsigned char luc_CRCHi = 0xFF;
unsigned char luc_CRCLo = 0xFF;
int li_Index=0;
while(lus_Len--){
li_Index = luc_CRCLo ^ *( lpuc_Frame++);
luc_CRCLo = (unsigned char)( luc_CRCHi ^ cuc_CRCHi[li_Index]);
luc_CRCHi = cuc_CRCLo[li_Index];
}
return (unsigned short int )(luc_CRCLo << 8 | luc_CRCHi);
}
int main() {
//Please fill in the data frame you want to set according to the datasheet(Excluding 2 Byte checksum frames)
unsigned char data[] = {0x55, 0x07, 0x00, 0x01, 0x01, 0x01};
unsigned short int crc_data = 0x0000;
unsigned int length = sizeof(data)/sizeof(unsigned char);
unsigned char datas[length + 2];
for (int n = 0; n < length; n++)datas[n] = data[n];
printf("The data frame length is: %d\n", length);
crc_data = us_CalculateCrc16(data, length);
datas[length] = (crc_data & 0xff00) >> 8;
datas[length+1] = crc_data & 0xff;
printf("The last two CRC check digits are: %04x\n", crc_data);
printf("The datas send to the radar: ");
for (int n = 0; n < length + 2; n++){
printf("0x%02x ", datas[n]);
}
printf("\n");
return 0;
}
编辑器执行后,还可以输出需要发送到雷达的完整数据帧。

步骤 4. 向雷达发送数据帧。
通过 UART 转 USB 设备 将雷达直接连接到计算机的 USB 端口。接线如下表所示。
 | |||
| 雷达传感器 | 主板 | ||
| 5V | --> | 5V | |
| GND | --> | GND | |
| RX | --> | TX | |
| TX | --> | RX | |
使用串口调试助手等软件选择雷达所在的串口。
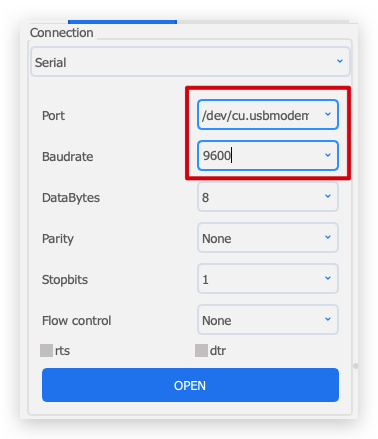
24GHz 雷达需要 5V 电源供电,否则雷达可能无法正常工作。
连接成功后,您将看到雷达发送稳定的消息流。

将我们在步骤 3 中获得的完整数据帧粘贴到软件的发送区域。然后点击发送。
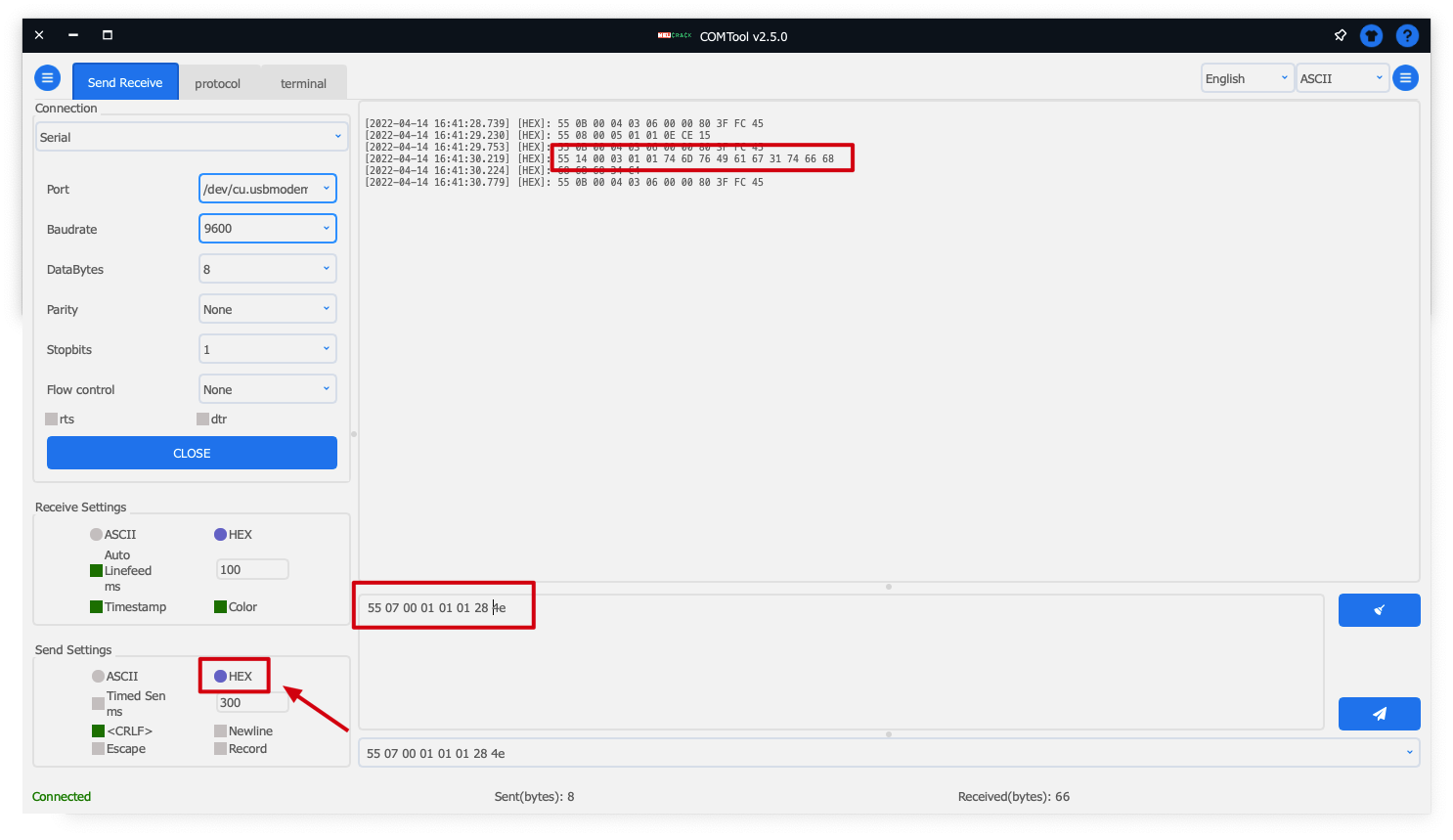
您可以查找第三个元素为 0x03 的返回数据集。这组数据是查询后获得的信息。如果您发送调整雷达参数的数据,它也会返回此类信息。
如果您选择 ASCII 作为发送数据的格式,每个数据集都需要加上 0x 前缀。如果您选择 HEX,则每组数据不需要加上 0x 前缀。
故障排除
常见问题 1:如何将代码应用到 Seeeduino(或 Arduino)?
由于硬件设计不同,XIAO 系列或 Wio Terminal 的串口命名为 Serial1,而 Seeeduino 或 Arduino 需要使用软串口。如果您想在 Seeeduino 上使用雷达,可以更改软串口或使用引脚 2(RX)和 3(TX)。

常见问题 2:如果 XIAO BLE 和雷达长时间收集数据后无法上传代码怎么办?
此时,您可以用手指轻按 XIAO BLE 顶部的复位按钮来重新上传程序运行。
资源
- [PDF] 人体存在用户手册
- [ZIP] 24GHz 呼吸检测原理图
- [PPTX] Seeed 毫米波传感器系列 V2.0
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。