XIAO 扩展底板
概述

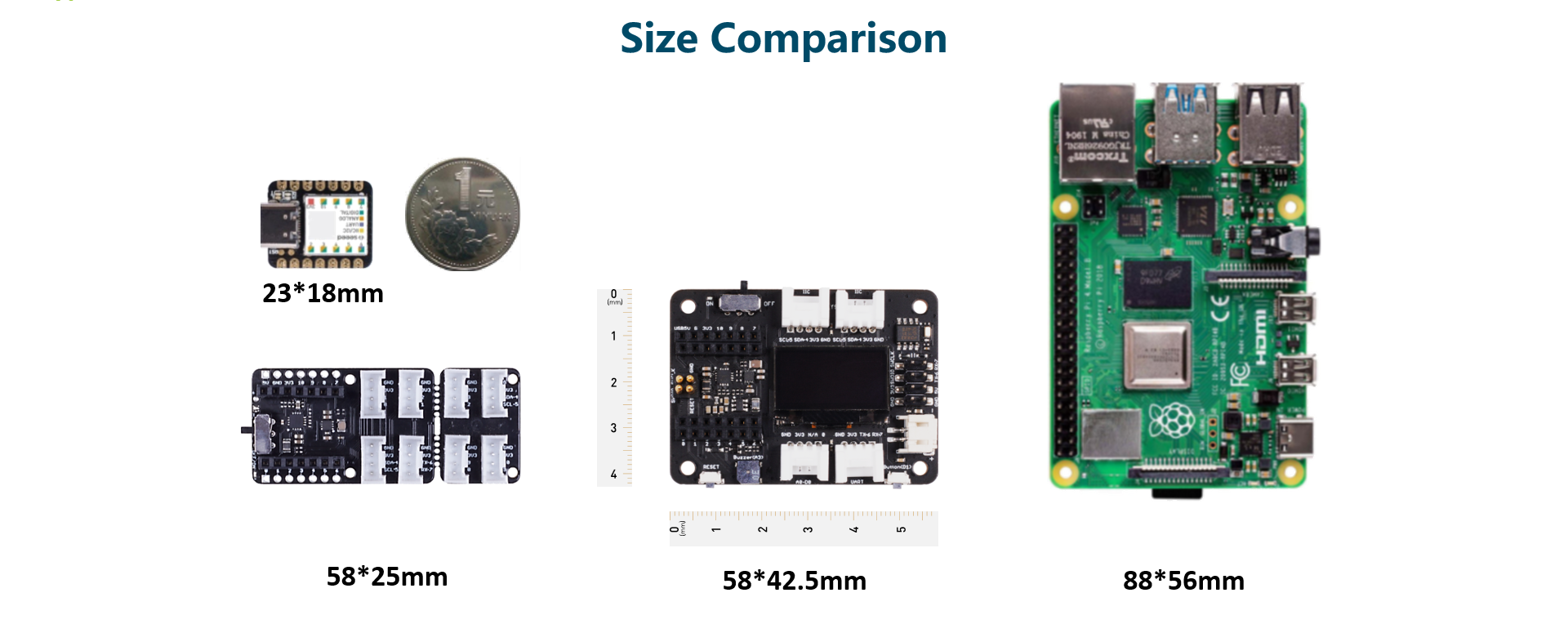
一款功能强大的 Seeed Studio XIAO 功能扩展板,尺寸仅为树莓派 4 的一半。它能够以简单快速的方式构建原型和项目。凭借其丰富的外设,包括 OLED、RTC、可扩展内存、无源蜂鸣器、RESET/用户按钮、5V 舵机连接器、多种数据接口……您可以探索 Seeed Studio XIAO 的无限可能性。该板还很好地支持 Circuitpython。
作为 Seeed Studio XIAO 外形规格,所有 Seeed Studio XIAO 板都支持 Grove Shield for Seeed Studio XIAO 和 Seeed Studio Expansion Base for XIAO。引脚之间存在细微差异,参考引脚图可以轻松管理。
Seeed Studio XIAO SAMD21、Seeed Studio XIAO RP2040 和 Seeed Studio XIAO nRF52840 与 Seeed Studio Expansion Base for XIAO 兼容。
特性
- 快速原型制作: 通过 RESET 按钮和引出到公头的 SWD 引脚轻松调试和复位。
- 丰富的外设: OLED 显示屏、RTC、可扩展内存空间、无源蜂鸣器、用户按钮、板载电池管理芯片。
- 无需焊接: 所有引脚引出。便捷的即插即用 Grove 连接器支持多种数据协议,包括 IIC、UART、模拟/数字。
- 支持 Circuit Python: 很好地支持 circuit python。MicroSD 卡槽可扩展内存空间,使得在原型制作和项目构建中分配更多所需库成为可能。
- 小型尺寸: 紧凑优雅,仅为树莓派 4 尺寸的一半,特别适合需要小型尺寸的项目。
规格
| 项目 | 值 |
|---|---|
| 工作电压 | 5V / 3.7V 锂电池 |
| 充电电流 | 460mA(最大) |
| RTC 定时器精度 | ± 1.5S/DAY(25°C) |
| RTC 电池 | CR1220 |
| 显示屏 | 0.96" OLED 显示屏 |
| 可扩展内存 | MicroSD 卡 |
| Grove 接口 | Grove IIC2、Grove UART1、A0/D0 Grove*1 |
| 其他外部设备 | 无源蜂鸣器、用户按钮、5V 舵机连接器 |
应用
- SWD 调试
- 快速原型制作
- 数据显示
- 小型项目
零件清单
| 项目 | 数量 |
|---|---|
| Seeed Studio Expansion Base for XIAO | *1 |
本产品不包含 Seeed Studio XIAO 和电池。由于 SWD 引脚不同,此扩展板不支持 XIAO nRF54L15 和 XIAO MG24。Seeed Studio XIAO 不断推出新产品。要了解该系列的最新产品开发,请访问 XIAO 系列主页。
入门指南
所需材料
| Seeed Studio XIAO SAMD21(预焊接) | Seeed Studio Expansion Base for XIAO |
|---|---|
|
|
| 立即购买 | 立即购买 |

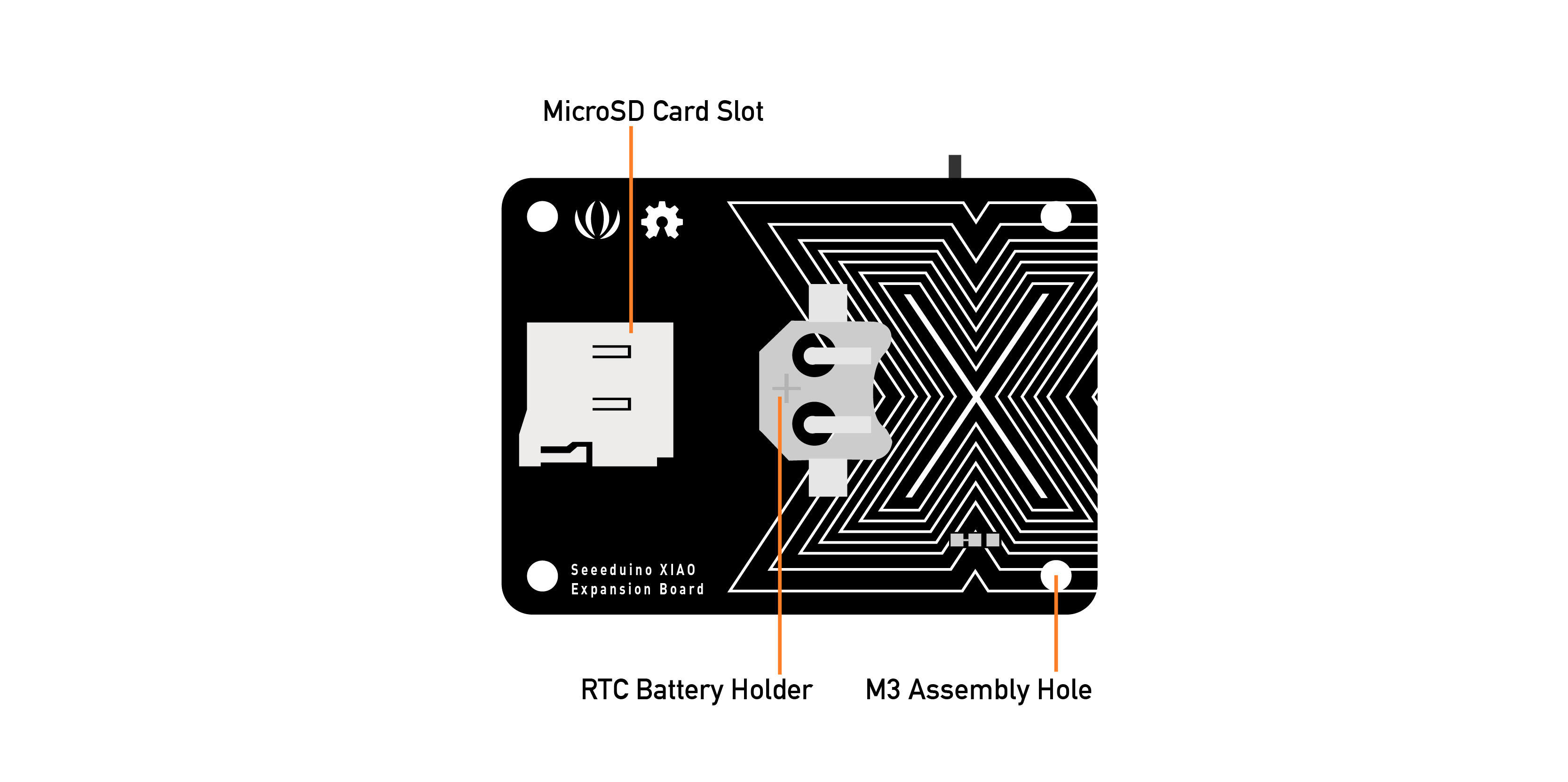
硬件概述
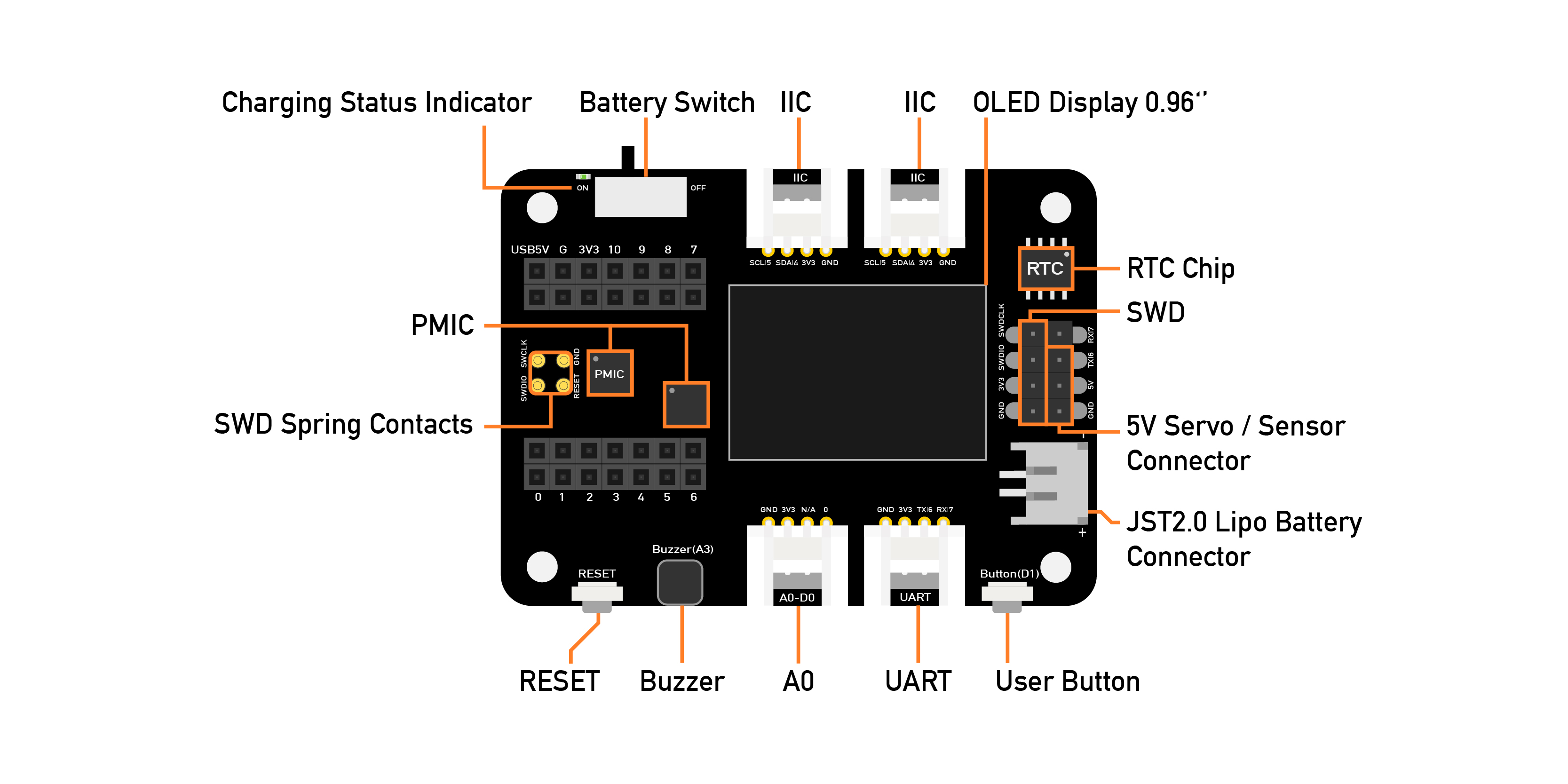
有一个外部 MicroSD 卡槽和 RTC 电池座,MicroSD 卡主要用于保存和运行 python.py 文件,RTC 用于跟踪当前时间,可用于在特定时间编程操作。
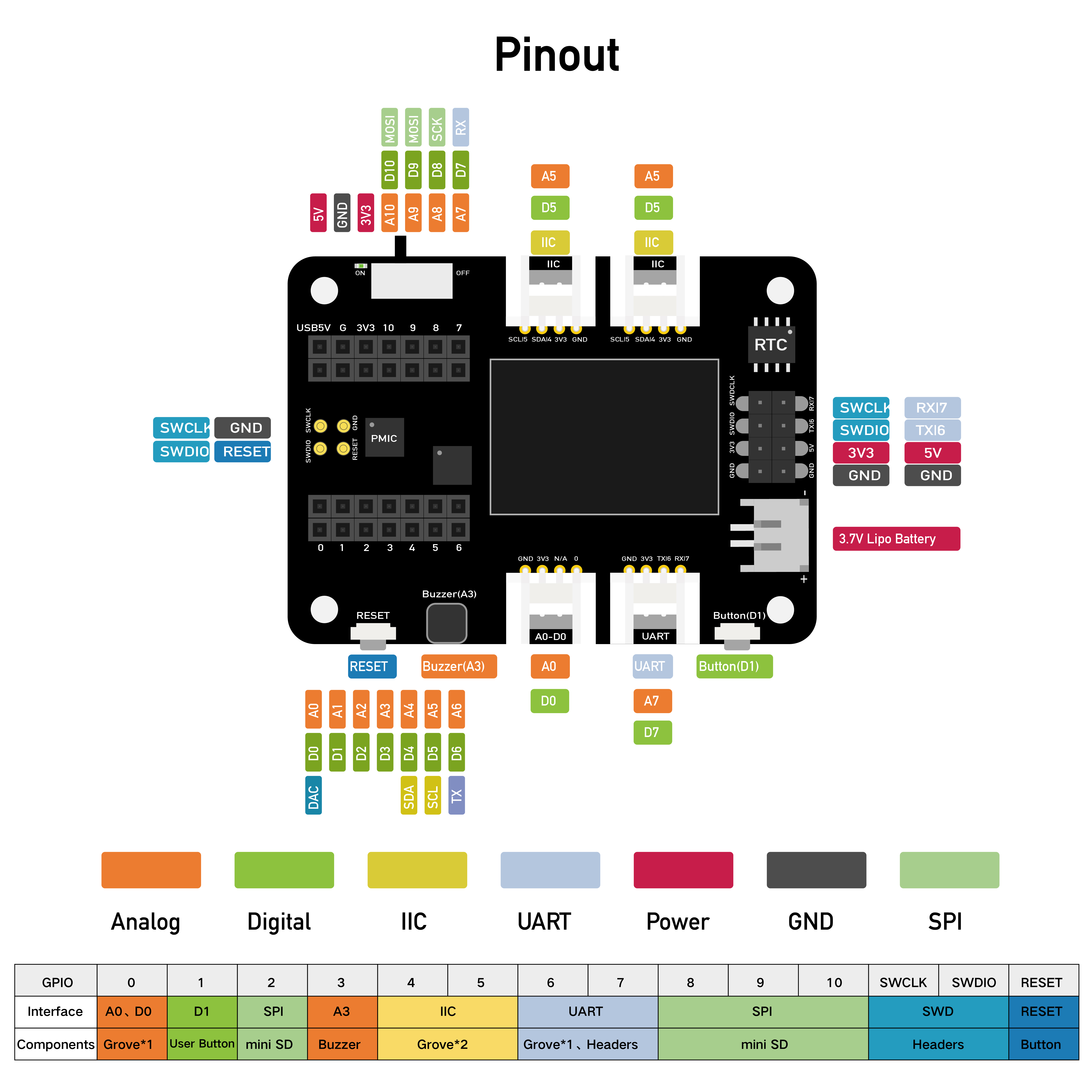
引脚图
Grove-Shield for Seeed Studio XIAO 的外部接头引脚描述。
扩展板使用
连接
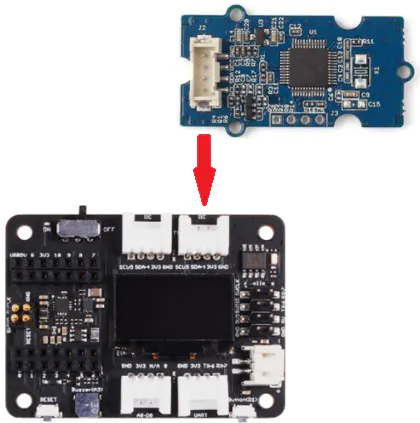
将 Seeed Studio XIAO SAMD21 放在扩展板上,Seeed Studio XIAO SAMD21 绿色 LED 应该亮起。
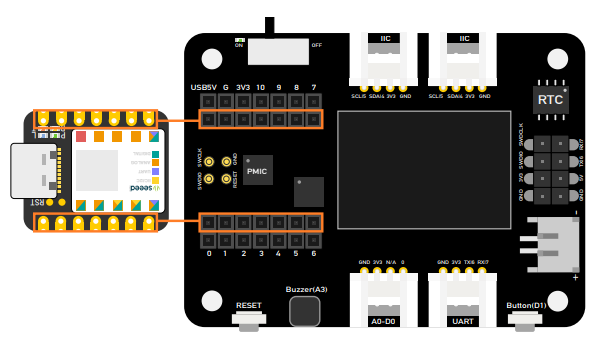
请先将 Seeed Studio XIAO 插在扩展板上,然后插入 Type-C,记住将 Seeed Studio XIAO 插入两个母头连接器的中间,否则您将损坏 Seeed Studio XIAO 和扩展板。
电池使用
Seeed Studio Expansion Base for XIAO 可以由电池供电,所以如果您做一些需要移动的演示,电池将帮助您解决电源供应问题。当您插入电池时,请注意正负极,按照图片连接电池以免损坏板子。
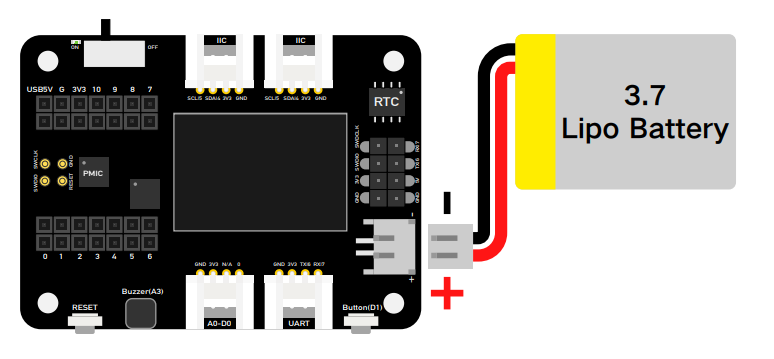
此外,当您插入电池线和 type-C 线并将按钮切换到开启时,板子会给电池充电。
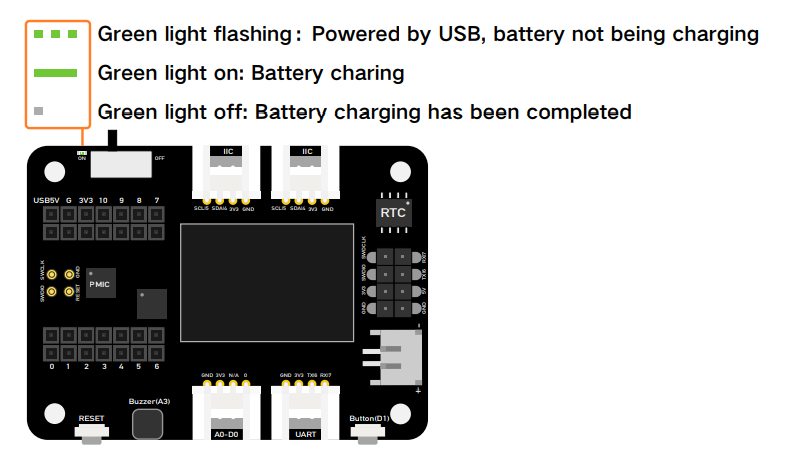
如下图所示,如果 LED 闪烁,表示电池没有充电或板子没有连接电池;如果 LED 持续亮起,表示电池正在充电。
扩展板上的模块
板载丰富的外设包括:
-
OLED 显示屏: 无需连接 PC 即可进行可视化数据显示,能够以更高效的方式进行调试,并构建传感器集线器、数据监控系统等应用。
-
RESET 按钮: 无需跳线和短路,一键轻松复位。
-
SWD 调试: SWD 引脚引出为公头,使调试器连接和固件下载更加容易。
-
高精度 RTC: 带电池备份的高精度实时时钟,在主电源关闭时能够保持准确时间。
-
可扩展内存: 背面有 MicroSD 卡槽,在添加库和使用 circuit python 时不再担心内存限制。
-
用户按钮: 除了 RESET 按钮外,还提供另一个用户定义的按钮。
-
无源蜂鸣器: 您可以改变 PMW 频率来产生不同的蜂鸣声,获得"蜂鸣器音乐"。
-
Grove 连接器: 所有引脚引出,即插即用的 Grove 连接器支持常见数据协议(Grove IIC2、Grove UART1、A0/D0 Grove*1)
-
锂电池充电: JST2.0mm 标准锂电池连接器和电池管理系统,支持 USB 和锂电池双重供电,以及便捷的板载电池充电。
-
5V 舵机连接器: 5V 输出引出到公头,用于 5V 舵机和传感器连接。

OLED 显示屏
此示例介绍如何使用 Seeed Studio Expansion Base for XIAO 上的 OLED 显示屏。
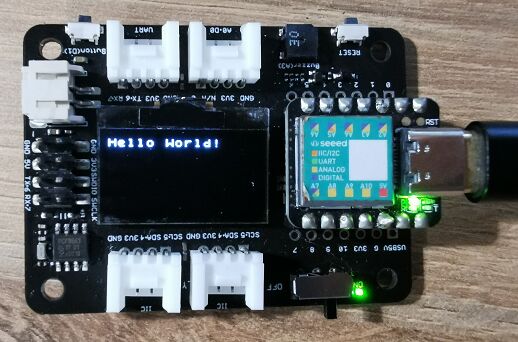
步骤 1. 将 Seeed Studio XIAO SAMD21 安装在扩展板上,然后连接 Type-C 线。
步骤 3. 复制代码并粘贴到 Arduino IDE 中,然后上传。
OLED 代码
#include <Arduino.h>
#include <U8x8lib.h>
#include <Wire.h>
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE, /* clock=*/ SCL, /* data=*/ SDA ); // OLEDs without Reset of the Display
void setup(void) {
u8x8.begin();
u8x8.setFlipMode(1); // Enable (1) and disbale (0) 180 degree rotation of the display content
}
void loop(void) {
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 0);
u8x8.print("Hello World!");
}
通过用户按钮控制 LED
此示例介绍如何使用 Seeed Studio Expansion Base for XIAO 上的按钮来控制 Seeed Studio XIAO SAMD21 上的 LED。
步骤 1. 将 Seeed Studio XIAO SAMD21 安装到扩展板上,然后连接 Type-C 线缆。
步骤 2. 打开 Arduino IDE,复制代码并粘贴到 Arduino IDE 中,然后上传。
代码
const int buttonPin = 1; // the number of the pushbutton pin
int buttonState = 0; // variable for reading the pushbutton status
void setup() {
// initialize the LED pin as an output:
pinMode(LED_BUILTIN, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPin, INPUT_PULLUP);
}
void loop() {
// read the state of the pushbutton value:
buttonState = digitalRead(buttonPin);
// check if the pushbutton is pressed. If it is, the buttonState is HIGH:
if (buttonState == HIGH) {
// turn LED on:
digitalWrite(LED_BUILTIN, HIGH);
} else {
// turn LED off:
digitalWrite(LED_BUILTIN, LOW);
}
}
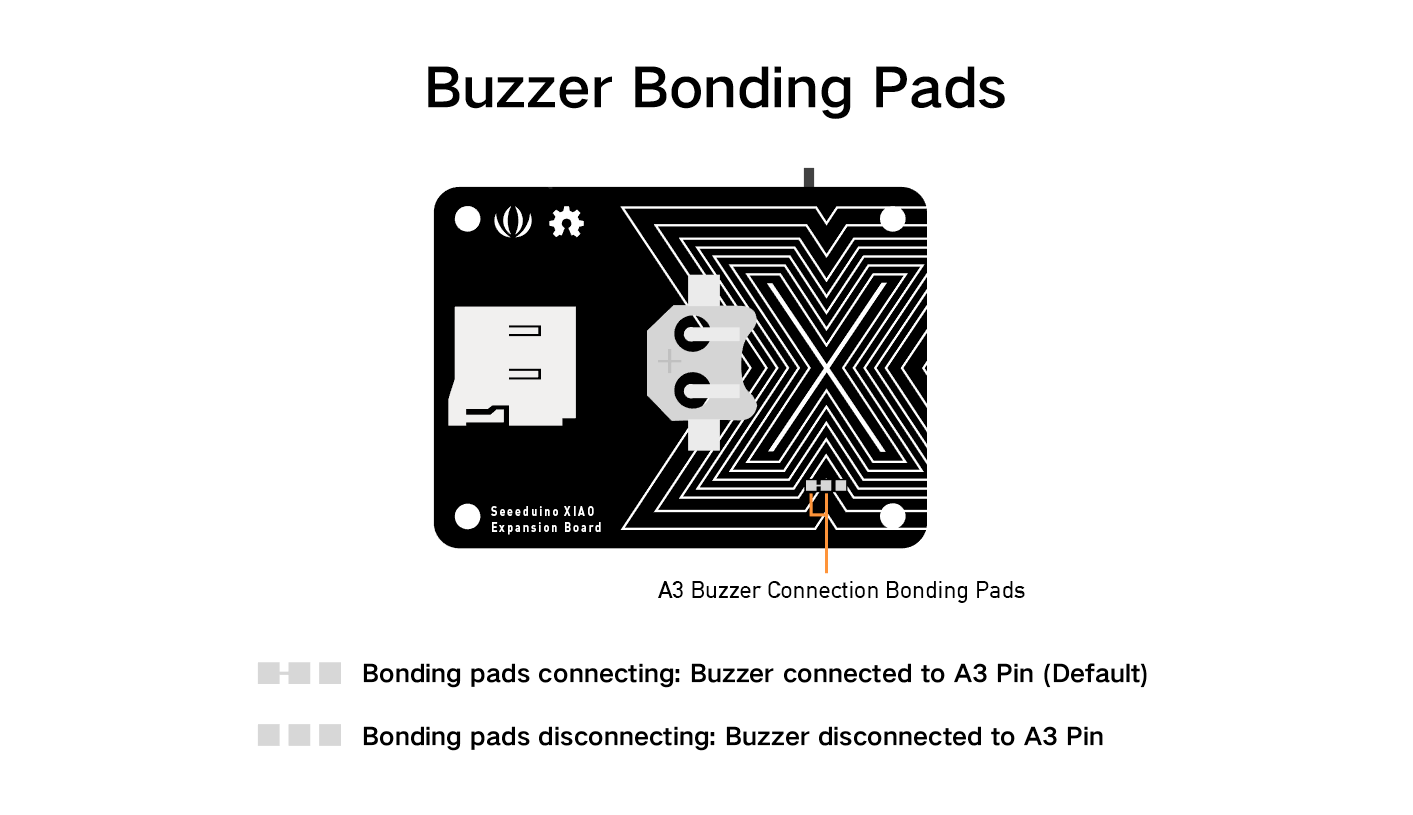
蜂鸣器
蜂鸣器默认连接到引脚 A3,如果您想移除蜂鸣器功能,只需按照下图所示,切断连线。
使用无源蜂鸣器播放歌曲
此示例使用 Seeed Studio XIAO 扩展底板上的蜂鸣器播放生日快乐歌。
步骤 1. 将 Seeed Studio XIAO SAMD21 安装到扩展板上,然后连接 Type-C 线缆。
步骤 2. 打开 Arduino IDE,复制代码并粘贴到 Arduino IDE 中,然后上传。
代码
int speakerPin = D3;
int length = 28; // the number of notes
char notes[] = "GGAGcB GGAGdc GGxecBA yyecdc";
int beats[] = { 2, 2, 8, 8, 8, 16, 1, 2, 2, 8, 8, 8, 16, 1, 2, 2, 8, 8, 8, 8, 16, 1, 2, 2, 8, 8, 8, 16 };
int tempo = 150;
void playTone(int tone, int duration) {
for (long i = 0; i < duration * 1000L; i += tone * 2) {
digitalWrite(speakerPin, HIGH);
delayMicroseconds(tone);
digitalWrite(speakerPin, LOW);
delayMicroseconds(tone);
}
}
void playNote(char note, int duration) {
char names[] = {'C', 'D', 'E', 'F', 'G', 'A', 'B',
'c', 'd', 'e', 'f', 'g', 'a', 'b',
'x', 'y'
};
int tones[] = { 1915, 1700, 1519, 1432, 1275, 1136, 1014,
956, 834, 765, 593, 468, 346, 224,
655 , 715
};
int SPEE = 5;
// play the tone corresponding to the note name
for (int i = 0; i < 16; i++) {
if (names[i] == note) {
int newduration = duration / SPEE;
playTone(tones[i], newduration);
}
}
}
void setup() {
pinMode(speakerPin, OUTPUT);
}
void loop() {
for (int i = 0; i < length; i++) {
if (notes[i] == ' ') {
delay(beats[i] * tempo); // rest
} else {
playNote(notes[i], beats[i] * tempo);
}
// pause between notes
delay(tempo);
}
}
通过旋转角度传感器控制舵机
此示例使用旋转角度传感器通过 Seeed Studio XIAO 扩展底板上的集成端口控制舵机。
步骤 1. 将 Seeed Studio XIAO SAMD21 安装到扩展板上,然后连接 Type-C 线缆。
步骤 2. 将舵机线缆连接到 I2C 端口,将旋转角度传感器连接到 D0。
步骤 3. 打开 Arduino IDE,复制代码并粘贴到 Arduino IDE 中,然后上传。
如果您的开发板是 XIAO ESP32 系列。在运行以下代码之前,您需要先在 Arduino Library Manager 中安装 ESP32Servo 库,并将以下代码从 #include <Servo.h> 更改为 #include <ESP32Servo.h>。
#include <Servo.h>
#include <Arduino.h>
#include <Wire.h>
#define ROTARY_ANGLE_SENSOR A0
#define ADC_REF 3 //reference voltage of ADC is 3v.If the Vcc switch on the seeeduino
#define GROVE_VCC 3 //VCC of the grove interface is normally 3v
#define FULL_ANGLE 300 //full value of the rotary angle is 300 degrees
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
Serial.begin(9600);
pinMode(ROTARY_ANGLE_SENSOR, INPUT);
myservo.attach(5); // attaches the servo on pin 9 to the servo object
}
void loop() {
float voltage;
int sensor_value = analogRead(ROTARY_ANGLE_SENSOR);
voltage = (float)sensor_value * ADC_REF / 1023;
float degrees = (voltage * FULL_ANGLE) / GROVE_VCC;
Serial.println("The angle between the mark and the starting position:");
Serial.println(degrees);
delay(50);
myservo.write(degrees);
}
RTC 时钟显示
此示例使用 RTC 在 OLED 上显示时钟。
步骤 1. 将 Seeed Studio XIAO SAMD21 安装到扩展板上,然后连接 Type-C 线缆。
步骤 2. 安装 u8g2 和 PCF8563 库,这是 如何安装库 的指南。
步骤 3. 复制代码并粘贴到 Arduino IDE 中,然后上传。
#include <Arduino.h>
#include <U8x8lib.h>
#include <PCF8563.h>
PCF8563 pcf;
#include <Wire.h>
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE, /* clock=*/ SCL, /* data=*/ SDA ); // OLEDs without Reset of the Display
void setup() {
Serial.begin(115200);
u8x8.begin();
u8x8.setFlipMode(1);
Wire.begin();
pcf.init();//initialize the clock
pcf.stopClock();//stop the clock
pcf.setYear(20);//set year
pcf.setMonth(10);//set month
pcf.setDay(23);//set dat
pcf.setHour(17);//set hour
pcf.setMinut(33);//set minut
pcf.setSecond(0);//set second
pcf.startClock();//start the clock
}
void loop() {
Time nowTime = pcf.getTime();//get current time
u8x8.setFont(u8x8_font_chroma48medium8_r); // choose a suitable font
u8x8.setCursor(0, 0);
u8x8.print(nowTime.day);
u8x8.print("/");
u8x8.print(nowTime.month);
u8x8.print("/");
u8x8.print("20");
u8x8.print(nowTime.year);
u8x8.setCursor(0, 1);
u8x8.print(nowTime.hour);
u8x8.print(":");
u8x8.print(nowTime.minute);
u8x8.print(":");
u8x8.println(nowTime.second);
delay(1000);
}
SD 卡功能
对于 XIAO SAMD21、XIAO RP2040、XIAO ESP32C3 和 XIAO ESP32S3,您无需安装单独的第三方 SD 卡库。以下程序适用于这些 XIAO。
扩展板电路设计使得 SD 卡插槽的 CS 引脚连接到 XIAO 的 D2 引脚。
#include <SPI.h>
#include <SD.h>
#include "FS.h"
File myFile;
void setup() {
// Open serial communications and wait for port to open:
Serial.begin(115200);
while(!Serial); // Execute after turning on the serial monitor
delay(500);
Serial.print("Initializing SD card...");
pinMode(D2, OUTPUT); // Modify the pins here to fit the CS pins of the SD card you are using.
if (!SD.begin(D2)) {
Serial.println("initialization failed!");
return;
}
Serial.println("initialization done.");
// open the file. note that only one file can be open at a time,
// so you have to close this one before opening another.
myFile = SD.open("/test.txt", FILE_WRITE); // The path to read and write files needs to start with "/"
// if the file opened okay, write to it:
if (myFile) {
Serial.print("Writing to test.txt...");
myFile.println("testing 1, 2, 3.");
// close the file:
myFile.close();
Serial.println("done.");
} else {
// if the file didn't open, print an error:
Serial.println("error opening test.txt");
}
// re-open the file for reading:
myFile = SD.open("/test.txt"); // The path to read and write files needs to start with "/"
if (myFile) {
Serial.println("test.txt:");
// read from the file until there's nothing else in it:
while (myFile.available()) {
Serial.write(myFile.read());
}
// close the file:
myFile.close();
} else {
// if the file didn't open, print an error:
Serial.println("error opening test.txt");
}
}
void loop() {
// nothing happens after setup
}
如果您使用的是 XIAO nRF52840 系列,那么您可能需要单独下载 SdFat 库 才能使用 SD 卡功能。
#include <SPI.h>
#include "SdFat.h"
SdFat SD;
#define SD_CS_PIN D2
File myFile;
void setup() {
// Open serial communications and wait for port to open:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
Serial.print("Initializing SD card...");
if (!SD.begin(SD_CS_PIN)) {
Serial.println("initialization failed!");
return;
}
Serial.println("initialization done.");
// open the file. note that only one file can be open at a time,
// so you have to close this one before opening another.
myFile = SD.open("/test.txt", FILE_WRITE);
// if the file opened okay, write to it:
if (myFile) {
Serial.print("Writing to test.txt...");
myFile.println("testing 1, 2, 3.");
// close the file:
myFile.close();
Serial.println("done.");
} else {
// if the file didn't open, print an error:
Serial.println("error opening test.txt");
}
// re-open the file for reading:
myFile = SD.open("test.txt");
if (myFile) {
Serial.println("test.txt:");
// read from the file until there's nothing else in it:
while (myFile.available()) {
Serial.write(myFile.read());
}
// close the file:
myFile.close();
} else {
// if the file didn't open, print an error:
Serial.println("error opening test.txt");
}
}
void loop() {
// nothing happens after setup
}
Seeed Studio XIAO 扩展底板亚克力外壳


我们为 Seeed Studio XIAO 扩展底板制作了这个亚克力外壳来保护它,这些是亚克力外壳组件。
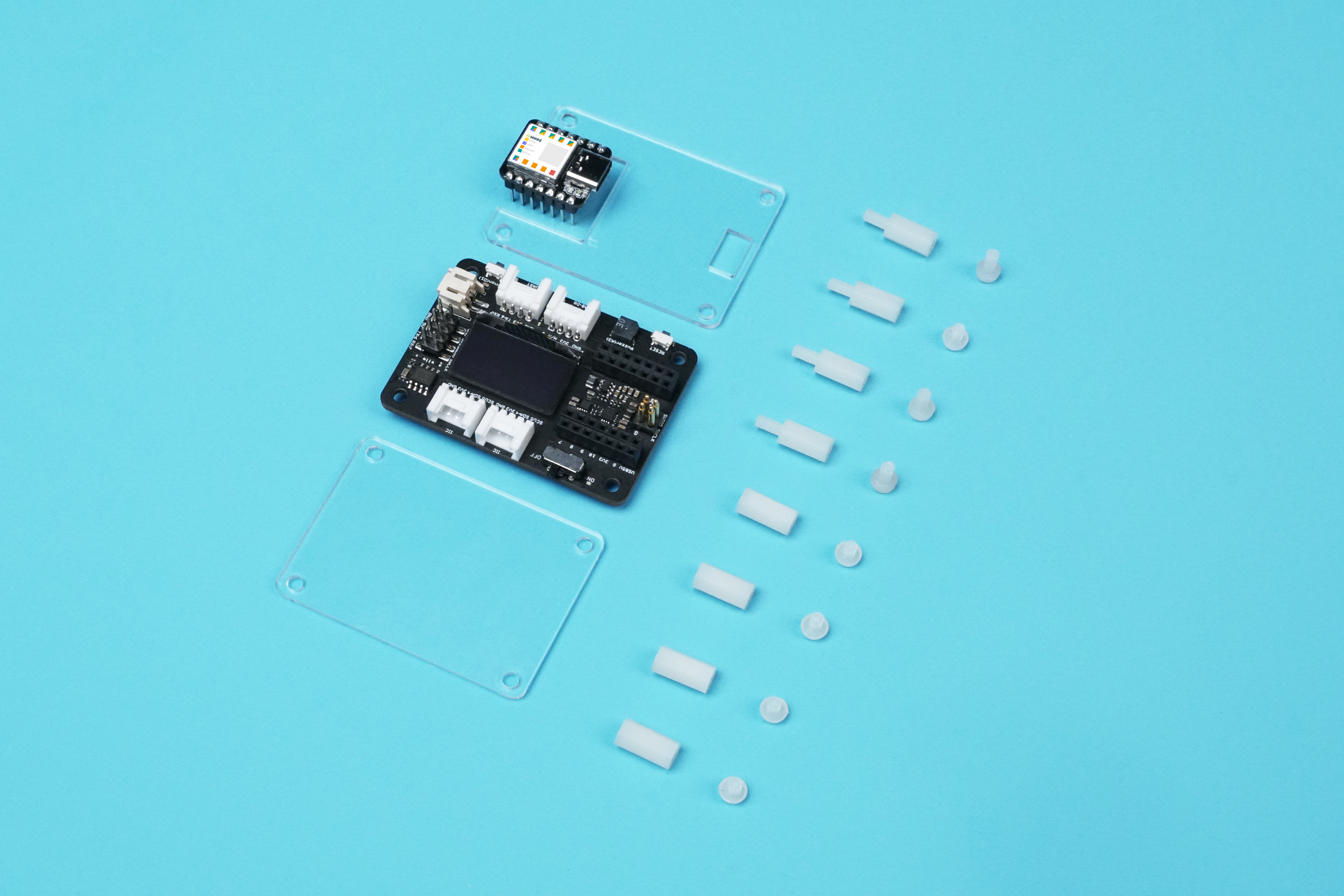
与 Seeed Studio XIAO 的 Grove 扩展板相比,Seeed Studio XIAO 扩展底板为用户增加了许多有用的模块。
这个亚克力外壳易于组装,还能让外壳看起来更整洁。
在带扩展板的 Seeed Studio XIAO SAMD21 上运行 CircuitPython
本教程介绍如何在Seeed Studio XIAO SAMD21 开发板上安装和运行 Adafruit Industries 官方的CircuitPython!
CircuitPython 是一种编程语言,旨在简化在低成本微控制器板上的实验和学习编程。它让入门变得比以往任何时候都容易,无需预先下载桌面软件。一旦设置好开发板,打开任何文本编辑器,就可以开始编辑代码。更多信息请参考这里。
安装 CircuitPython
步骤 1. 将 Seeed Studio XIAO SAMD21 安装到扩展板上,然后连接 Type-C 线缆。
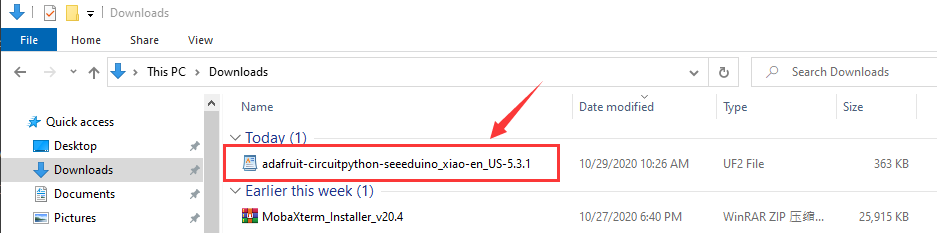
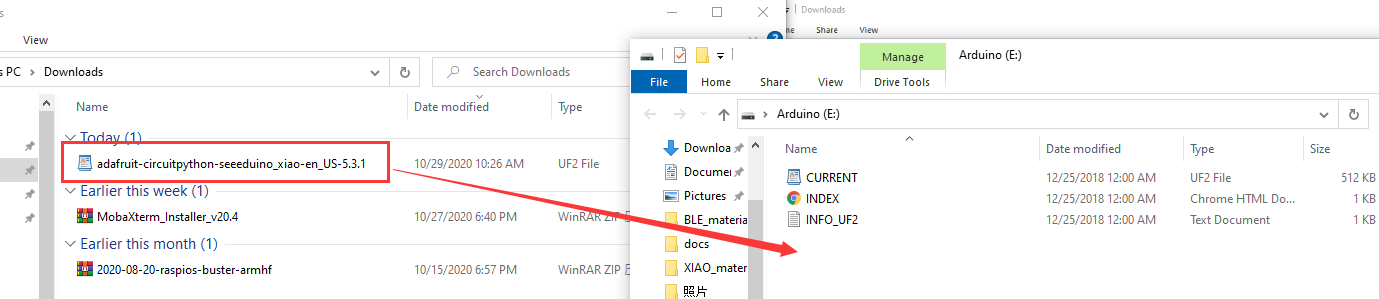
步骤 2. 下载官方的Seeed Studio XIAO SAMD21 CircuitPython 引导程序。一个 .uf2 文件将存储在您的 PC 下载文件夹中。
步骤 3. 通过在 Seeed Studio XIAO 扩展底板上快速按两次复位按钮进入 DFU 引导程序模式,然后您的 PC 将出现 Arduino 驱动器。
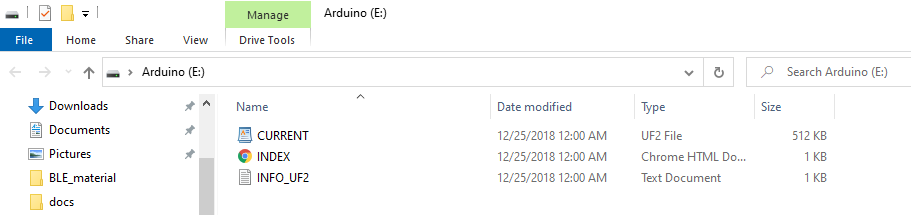
步骤 4. 您的 PC 中应该出现一个名为 Arduino 的外部驱动器。将下载的 CircuitPython uf2 文件拖到 Arduino 驱动器中。
步骤 5. 加载 CircuitPython 引导程序后,拔掉 USB Type-C 并重新连接。应该会出现一个名为 CIRCUITPY 的新外部驱动器。
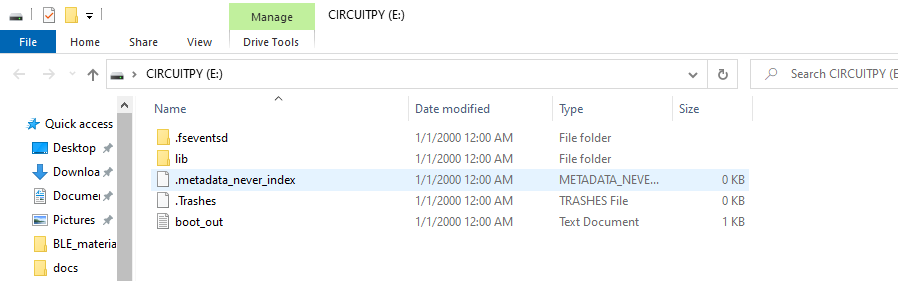
步骤 6. 现在,CircuitPython 已加载到 Seeed Studio XIAO SAMD21 上!您需要做的就是编写您的 Python 程序,将其命名为 main.py 并将其拖到 CIRCUITPY 驱动器上。
CircuitPython 闪烁示例
这是一个简单的示例,介绍如何在 Seeed Studio XIAO 上使用 CircuitPython。
步骤 1 在 CIRCUITPY 驱动器上创建一个名为 main 的 txt 文件。
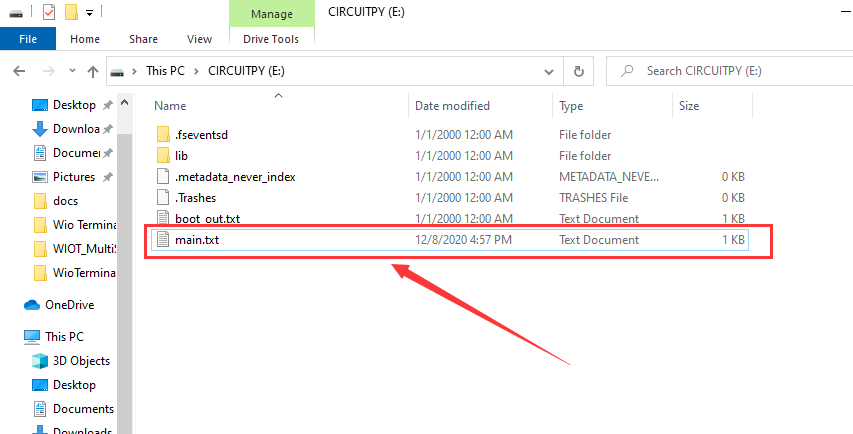
main 名称可以是以下之一:code.txt、code.py、main.py、main.txt,关于此行为有更多详细信息。
步骤 2 使用 REPL 获取橙色 LED 的引脚。有关 REPL 的详细信息,请参阅Welcome to CircuitPython! 要使用 REPL,您首先需要连接到串行控制台。建立连接后,按 CTRL+C 两次进入编辑模式。然后,复制以下代码并分别输入。
>>> import board
>>> dir(board)
您将看到开发板上所有可在代码中使用的引脚列表。每个开发板会根据可用引脚数量略有不同。

您看到 YELLOW_LED_INVERTED 了吗?这就是您用来闪烁橙色 LED 的引脚!
步骤 3 将代码粘贴到 main 文件中然后保存,您将看到 Seeed Studio XIAO SAMD21 开发板上的橙色 LED 闪烁。
代码
import time
import board
from digitalio import DigitalInOut, Direction
led = DigitalInOut(board.YELLOW_LED_INVERTED)
led.direction = Direction.OUTPUT
while True:
led.value = True
time.sleep(1)
led.value = False
time.sleep(1)
CircuitPython 的 MicroSD 卡
Seeed Studio XIAO SAMD21 内置约 40 KB 闪存,但可能没有足够的空间来存储大型 Python 代码文件,幸运的是,Seeed Studio XIAO SAMD21 扩展板内置了一个 MicroSD 卡插槽来扩展存储空间,因此您可以按照此说明学习如何在 MicroSD 卡上运行 CircuitPython。
MicroSD 卡系统格式为 FAT 或 exFAT。如果您使用其他 MicroSD 卡系统格式,将导致 MicroSD 卡无法被识别。
步骤 1. 准备一张 micro SD 卡插入 Seeed Studio XIAO SAMD21 扩展板。
步骤 2. 假设您还没有下载CircuitPython 文件,请参考安装 CircuitPython章节。
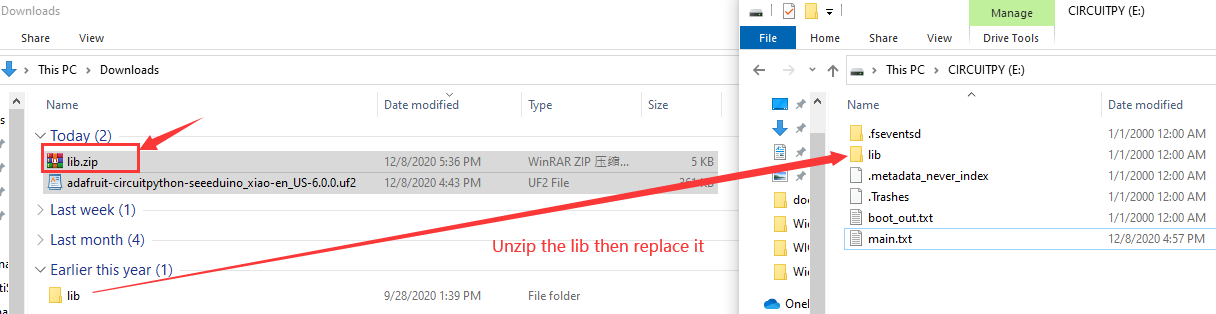
步骤 3. 下载lib解压文件,然后用新的 lib 替换 CIRCUITPY 中的 lib。
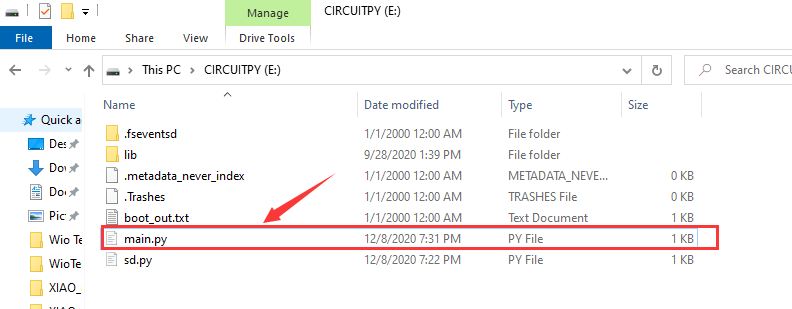
步骤 4. 在 CIRCUITPY 驱动器中下载main.py文件。
main.py 代码
import sd
f = open("/sd/hello.txt", "r") ## read the file from SD card
print(f.read())
步骤 5. 在 CIRCUITPY 驱动器中下载sd.py文件。
sd.py 代码
import os
import adafruit_sdcard
import board
import busio
import digitalio
import storage
import sys
# Connect to the card and mount the filesystem for Seeed Studio XIAO .
spi = busio.SPI(board.SCK, board.MOSI, board.MISO)
cs = digitalio.DigitalInOut(board.D2)
sdcard = adafruit_sdcard.SDCard(spi, cs)
vfs = storage.VfsFat(sdcard)
storage.mount(vfs, "/sd")
sys.path.append("/sd")
sys.path.append("/sd/lib") ## switch to the path to SD card
蜂鸣器示例
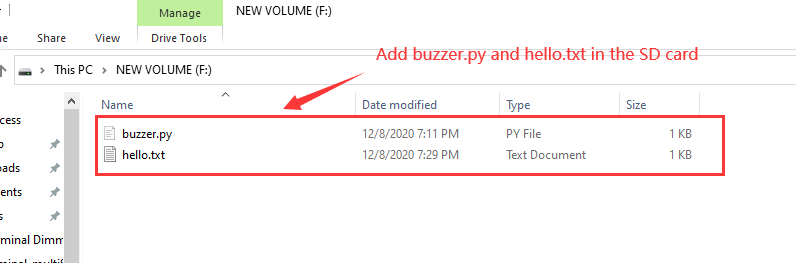
此示例用于通过在 MicroSD 卡中运行 buzzer.py 来测试蜂鸣器。
步骤 1. 您可以直接将buzzer.py粘贴到 MicroSD 卡中。
步骤 2. 在 CIRCUITPY 驱动器中打开 main.py。
步骤 3. 在 main.py 文件中添加 import buzzer。
当您完成所有步骤后,蜂鸣器将开始工作。如果您要在 MicroSD 卡中运行其他 Python 文件,请模仿此示例。
如果您想回到 Arduino 模式,只需在 Arduino IDE 中上传任何程序即可。
演示
项目 1 - 遥控风扇
概述
本教程介绍如何制作一个迷你风扇放在您的房间里保持凉爽。
特性
- 自动摆动风扇
所需组件
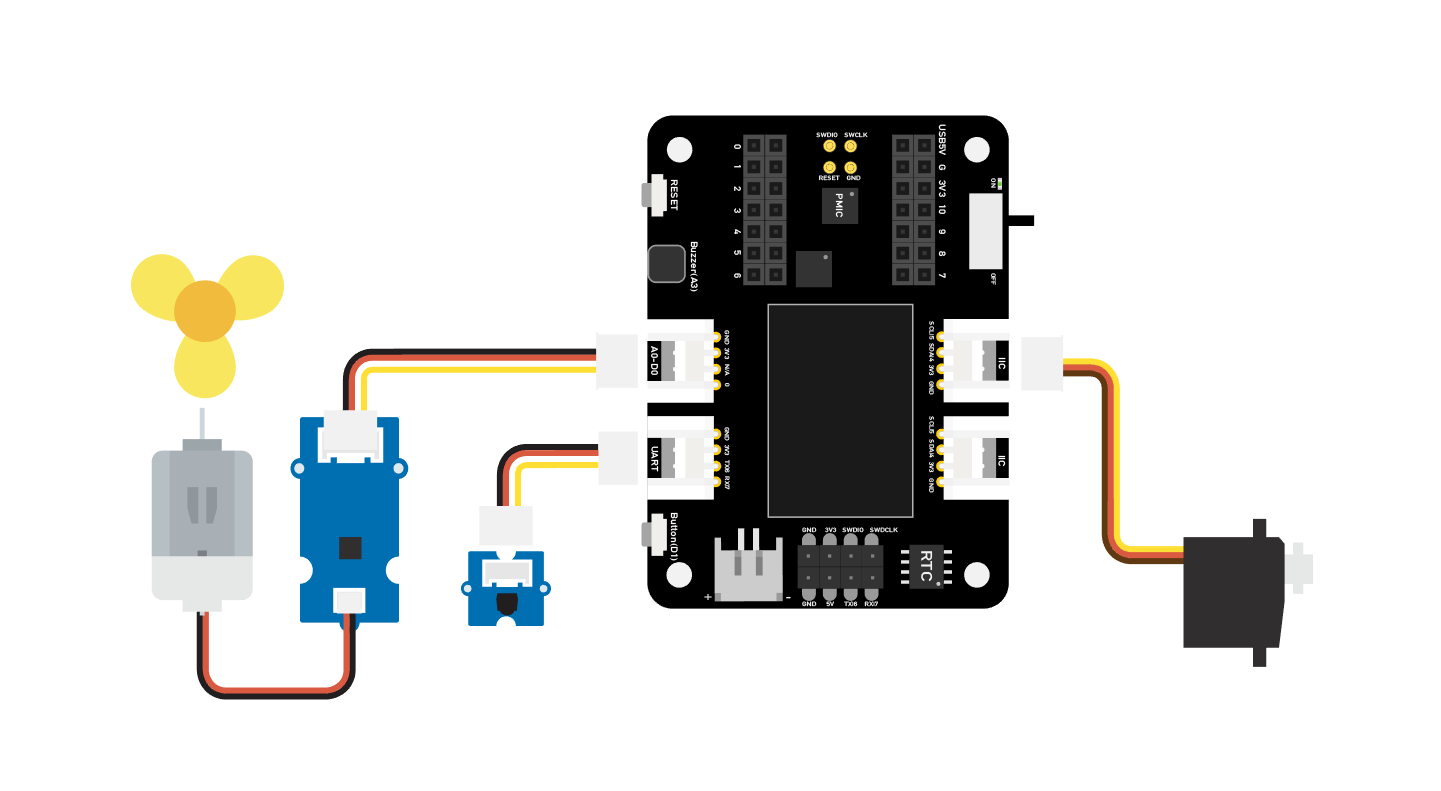
硬件连接
请按照相同颜色的线将每个传感器连接到开发板上。请将风扇 Grove 线缆连接到 D0,舵机 Grove 线缆连接到 I2C,红外 Grove 线缆连接到 D7。
Arduino 说明
步骤 1. 按照连接图将所有传感器连接到开发板上。
步骤 2. 安装 Arduino-IRremote 库,这是 如何安装库 的指南。
步骤 3. 复制代码粘贴到 Arduino IDE 中然后上传。
步骤 4. 将风扇放置在安全位置,尝试按下按钮确保它能安全工作。
代码
#include <IRremote.h>
#include <Servo.h>
Servo myservo; // create servo object to control a servo
int RECV_PIN = 7; // set pin 2 as IR control
IRrecv irrecv(RECV_PIN);
decode_results results;
int pos = 90; // variable to store the servo position
int fanPin = 0; // set D6 as control switch
int fanState = LOW;
int IO = 0;
void setup()
{
Serial.begin(9600);
Serial.println("Enabling IRin"); // remind enabling IR
irrecv.enableIRIn(); // Start the receiver
Serial.println("Enabled IRin");
myservo.attach(5); // attaches the servo on pin 2 to the servo object
pinMode(fanPin, OUTPUT);
}
void loop() {
if (irrecv.decode(&results)) { //checking IR signal
if (results.value == 2155829415) { // Power off/on
IO++;
if (IO % 2 == 0) {
fanState = HIGH;
digitalWrite(fanPin, fanState);
delay(100);
}
else {
fanState = LOW;
digitalWrite(fanPin, fanState);
delay(100);
}
}
if (results.value == 2155821255 ) { // fan swing to left
for (pos; pos <= 89; pos += 1) { // goes from 0 degrees to 90 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(40); // waits 15ms for the servo to reach the position
if (irrecv.decode(&results)) {
irrecv.resume();
if (results.value == 2155870215)
break;
}
}
}
if (results.value == 2155870215 ) { // fan swing to right
for (pos; pos >= 1; pos -= 1) { // goes from 90 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(40); // waits 15ms for the servo to reach the position
if (irrecv.decode(&results)) {
irrecv.resume();
if (results.value == 2155821255)
break;
}
}
}
Serial.println(pos);
Serial.println(results.value, HEX);
Serial.println(results.value);
irrecv.resume(); //recive next intrustion
}
delay(100);
}
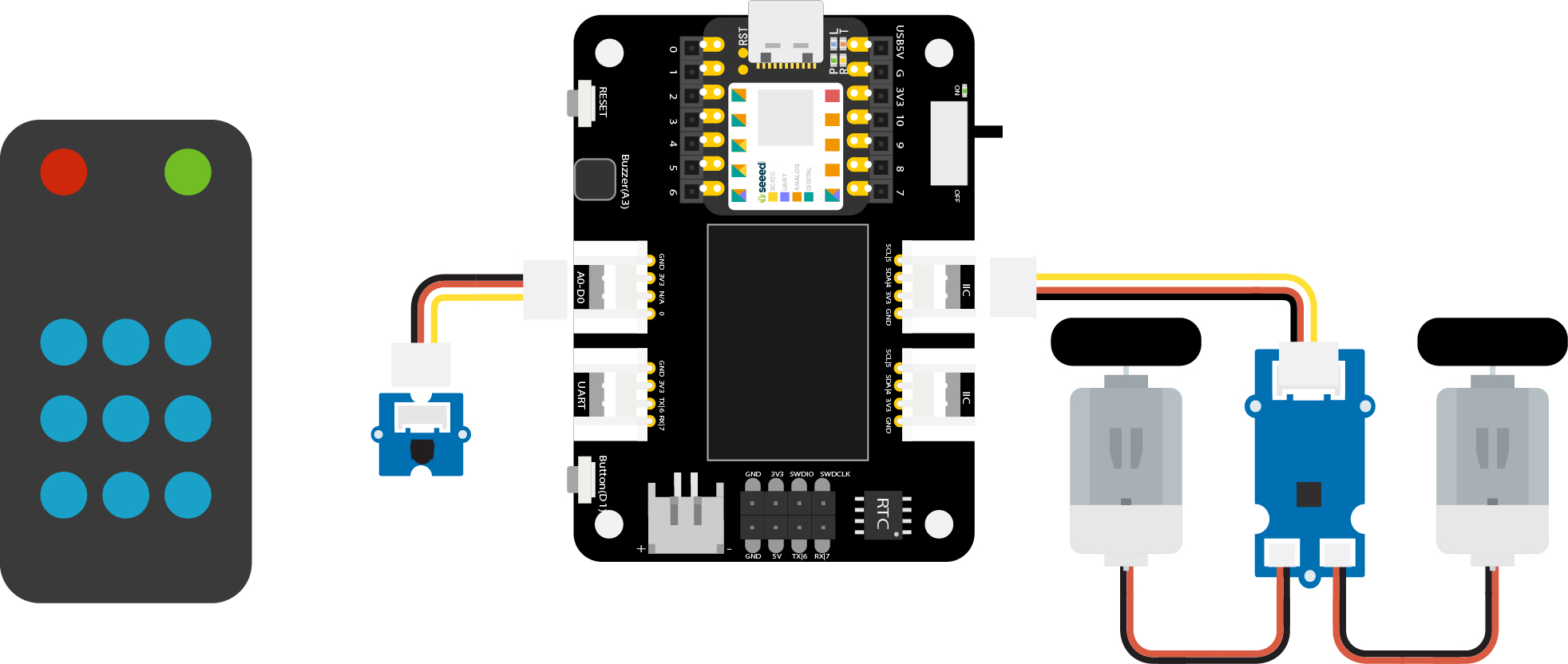
项目 2 - 遥控小车
概述
本教程介绍如何制作一个遥控小车。
特点
- 迷你尺寸小车,易于穿越狭窄道路
所需组件
硬件连接
请按照相同颜色的线将每个传感器连接到板上。请将红外传感器 Grove 线缆连接到 D0,迷你电机驱动器 Grove 线缆连接到 I2C。
Arduino 说明
步骤 1. 按照连接图将所有传感器连接到板上。
步骤 2. 下载 Arduino IDE
步骤 3. 安装 Arduino-IRremote 和 Motor driver 库,这是 如何安装库 的指南。
步骤 4. 复制代码粘贴到 Arduino IDE 中然后上传。
代码
#include <Arduino.h>
#include <U8g2lib.h>
#include <IRremote.h>
#include <SparkFunMiniMoto.h> // Include the MiniMoto library
// Create two MiniMoto instances, with different address settings.
MiniMoto motor0(0xC4); // A1 = 1, A0 = clear
MiniMoto motor1(0xC0); // A1 = 1, A0 = 1 (default)
#define FAULTn 1 // Pin used for fault detection.
int RECV_PIN = 0; // set pin 2 as IR control
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup() {
Serial.begin(9600);
Serial.println("Enabling IRin"); // remind enabling IR
irrecv.enableIRIn(); // Start the receiver
pinMode(FAULTn, INPUT);
}
void loop() {
if (irrecv.decode(&results)) { //checking IR signal
if (results.value == 2155862055) {
//Forward 2155862055
motor0.drive(-600);
motor1.drive(600);
delayUntil(20);
}
if (results.value == 2155813095) {
//Brake 2155813095
motor0.brake();
motor1.brake();
delay(100);
}
if (results.value == 2155823295) {
//backward 2155823295
motor0.drive(600);
motor1.drive(-600);
delayUntil(20);
}
if (results.value == 2155829415) {
//Stop 2155829415
motor0.stop();
motor1.stop();
delay(100);
}
if (results.value == 2155821255) {
//turn right 2155821255
motor0.drive(600);
motor1.drive(600);
delayUntil(20);
}
if (results.value == 2155837575) {
//turn left 2155837575
motor0.drive(-600);
motor1.drive(-600);
delayUntil(20);
}
irrecv.resume(); //recive next intrustion
}
delay(100);
}
void delayUntil(unsigned long elapsedTime) {
unsigned long startTime = millis();
while (startTime + elapsedTime > millis()) {
if (digitalRead(FAULTn) == LOW) {
byte result = motor0.getFault();
result = motor1.getFault();
}
}
}
项目 3 - 指纹解锁宝盒 - Seeed Studio XIAO
概述
这个盒子可以存放你的重要物品,你不用担心有人会拿走你的东西,盒子具有指纹功能来保护你的物品,如果指纹验证失败,蜂鸣器会报警,LED 环会显示红色,只有在开始时在板上注册过的手指,然后将手指放在板上,当指纹通过验证时,LED 环会显示绿色。
特点
- 易于记录你的指纹
- LED 环可以提醒你锁定状态
- OLED 屏幕可以显示当前信息
- 蜂鸣器可以提醒你指纹是否通过验证
所需组件
硬件连接
请按照图片所示将每个模块连接到板上。将指纹模块连接到 XIAO 扩展板的 UART 端口,将舵机连接到 XIAO 扩展板的 D0 端口。
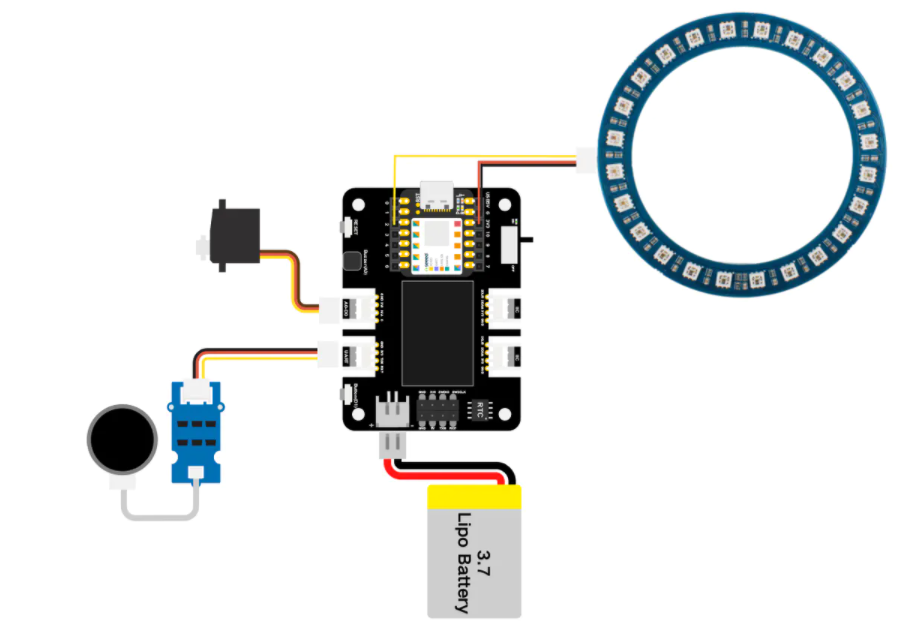
注意,NeoPixel 环通过三根不同颜色的线直接连接到 XIAO 开发板的引脚:用黄线将 NeoPixel 环的 DIN 引脚连接到 XIAO 的 D1 引脚,用红线将 NeoPixel 环的 VIN 引脚连接到 XIAO 的 3V3 引脚,用黑线将 NeoPixel 环的 GND 引脚连接到 XIAO 的 GND 引脚。

Arduino 说明
步骤 1. 按照连接图将所有传感器连接到板上。
步骤 2. 下载 Arduino IDE
步骤 3. 安装 u8g2、Servo、Seeed_Arduino_KCT202 和 Seeed_LED_Ring 库,这是 如何安装库 的指南。
步骤 4. 复制代码粘贴到 Arduino IDE 中然后上传。
演示
- 记录你的指纹
屏幕会在开始时显示指纹记录,你只需要将手指放在指纹设备上,之后程序会分析你的指纹,然后完成注册。
- 身份验证(通过认证)
屏幕会显示 "Please verify",你需要将手指放在指纹设备上,然后 LED 环会变成绿色。
- 身份验证(未通过认证)
如果其他人将手指放在上面,LED 环将变为红色,板子将显示 "Identity deny",同时警报器将工作。
代码
#include <Servo.h>
#include <Arduino.h>
#include <U8x8lib.h>
#include "ATSerial.h"
#include "Protocol.h"
#include "KCT202.h"
#include "Adafruit_NeoPixel.h"
#define PIXEL_PIN 2 // Digital IO pin connected to the NeoPixels.
#define PIXEL_COUNT 24
#define debug SerialUSB
#define uart Serial1
FingerPrint_KCT202<Uart, Serial_> kct202;
Adafruit_NeoPixel strip = Adafruit_NeoPixel(PIXEL_COUNT, PIXEL_PIN, NEO_GRB + NEO_KHZ800);
Servo myservo;
Protocol_oprt oprt;
uint8_t err_code = 0;
uint8_t param[10];
uint32_t param_len;
int pos = 0;
const int buttonPin = 1;
int buttonState = 0;
int BuzzerPin = A3;
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
void setup(void) {
Serial.begin(115200);
strip.setBrightness(255);
strip.begin();
strip.show(); // Initialize all pixels to 'off'
colorWipe(strip.Color(125, 0, 125), 50);
u8x8.begin();
u8x8.setFlipMode(0);
debug.begin(115200);
pinMode(buttonPin, INPUT_PULLUP);
pinMode(BuzzerPin, OUTPUT);
kct202.begin(uart, debug);
myservo.attach(0);
myservo.write(0);
kct202.autoRegisterFingerPrint(1, 4, LED_OFF_AFTER_GET_GRAGH | PRETREATMENT_GRAGH | NOT_RET_FOR_EVERY_STEP | OVERRIDE_CURR_FINGER_PRINT);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print("finger recording");
if (0 == kct202.getRegisterResponAndparse()) {
debug.println("Register ok!");
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print(" be ready ");
delay(500);
colorWipe(strip.Color(0, 125, 125), 50);
u8x8.setCursor(0, 3);
u8x8.print(" *** 3 *** ");
delay(500);
u8x8.setCursor(0, 3);
u8x8.print(" *** 2 *** ");
delay(500);
u8x8.setCursor(0, 3);
u8x8.print(" *** 1 *** ");
delay(500);
u8x8.setCursor(0, 3);
u8x8.print(" Registered");
delay(800);
}
}
void loop(void) {
uint16_t finger_num = 0;
kct202.autoVerifyFingerPrint(CHECK_ALL_FINGER_TEMP,
LED_OFF_AFTER_GET_GRAGH | PRETREATMENT_GRAGH | NOT_RET_FOR_EVERY_STEP);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print(" Please verify ");
if (0 == kct202.getVerifyResponAndparse(finger_num)) {
debug.println("Verify ok!");
debug.print("Your finger temp id = ");
debug.println(finger_num, HEX);
colorWipe(strip.Color(0, 255, 30), 50);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print("Identity comfirm");
delay(800);
analogWrite(BuzzerPin, 128);
delay(100);
analogWrite(BuzzerPin, 0);
delay(100);
analogWrite(BuzzerPin, 128);
delay(100);
analogWrite(BuzzerPin, 0);
delay(100);
for (pos = 0; pos <= 90; pos += 1) {
myservo.write(pos);
delay(15);
}
while (1) {
// pinMode(buttonPin, INPUT);
buttonState = digitalRead(buttonPin);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print("Please close ");
Serial.println(pos);
Serial.println(buttonState);
if (buttonState == LOW && pos == 91) {
for (pos = 91; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print("Lock closing ");
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
colorWipe(strip.Color(255, 0, 0), 50);
break;
}
}
}
else {
colorWipe(strip.Color(255, 0, 0), 50);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print(" Identity deny ");
// myservo.write(0);
delay(200);
analogWrite(BuzzerPin, 250);
delay(2000);
analogWrite(BuzzerPin, 0);
delay(100);
u8x8.setCursor(0, 3);
u8x8.print(" Please retry ");
delay(1500);
}
}
void colorWipe(uint32_t c, uint8_t wait) {
for (uint16_t i = 0; i < strip.numPixels(); i++) {
strip.setPixelColor(i, c);
strip.show();
delay(70);
}
}
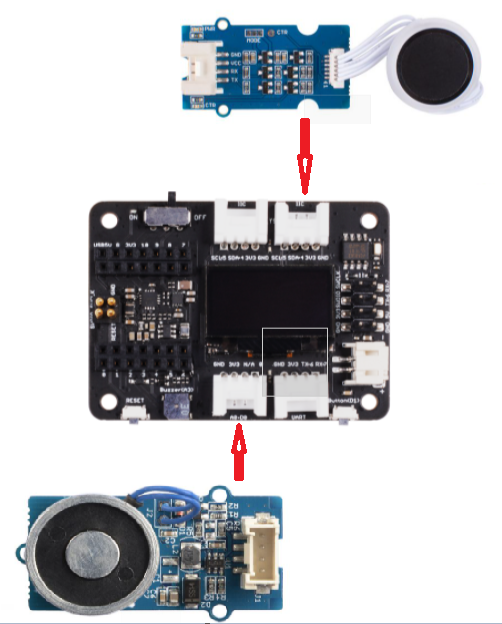
项目 4 - Seeed Studio XIAO 扩展底板 - 雷神之锤
概述

这个锤子模拟了雷神之锤,你需要在这个设备上记录你的指纹,然后你就会成为它的主人。锤子需要一个磁铁吸附在 Grove - 电磁铁上,直到它的主人通过指纹解锁,锤子才能被拿走。
所需组件
硬件连接
请用 Grove 线将扩展板和所需模块连接,将 Grove 电磁铁模块连接到 D0 端口,将指纹模块连接到 I2C 端口。
Arduino 说明
步骤 1. 按照连接图将所有传感器连接到板子上。
步骤 2. 下载 Arduino IDE
步骤 3. 安装 u8g2 和 Seeed_Arduino_KCT202 库,这是 如何安装库 的指南。
步骤 4. 复制代码粘贴到 Arduino IDE 中然后上传。
代码
#include <U8x8lib.h>
#include "ATSerial.h"
#include "Protocol.h"
#include "KCT202.h"
#define debug SerialUSB
#define uart Serial1
FingerPrint_KCT202<Uart, Serial_> kct202;
Protocol_oprt oprt;
uint8_t err_code = 0;
uint8_t param[10];
uint32_t param_len;
int Electromagnet = 0;
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
// the setup routine runs once when you press reset:
void setup() {
// initialize the digital pin as an output.
u8x8.begin();
u8x8.setFlipMode(0);
debug.begin(115200);
pinMode(Electromagnet, OUTPUT);
digitalWrite(Electromagnet, HIGH); // turn the Electromagnet on (HIGH is the voltage level)
kct202.begin(uart, debug);
kct202.autoRegisterFingerPrint(1, 4, LED_OFF_AFTER_GET_GRAGH | PRETREATMENT_GRAGH | NOT_RET_FOR_EVERY_STEP | OVERRIDE_CURR_FINGER_PRINT);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print("finger recording");
if (0 == kct202.getRegisterResponAndparse()) {
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print(" be ready ");
delay(500);
u8x8.setCursor(0, 3);
u8x8.print(" *** 3 *** ");
delay(500);
u8x8.setCursor(0, 3);
u8x8.print(" *** 2 *** ");
delay(500);
u8x8.setCursor(0, 3);
u8x8.print(" *** 1 *** ");
delay(500);
u8x8.setCursor(0, 3);
u8x8.print(" Registered");
delay(800);
}
}
// the loop routine runs over and over again forever:
void loop() {
uint16_t finger_num = 0;
kct202.autoVerifyFingerPrint(CHECK_ALL_FINGER_TEMP, LED_OFF_AFTER_GET_GRAGH | PRETREATMENT_GRAGH | NOT_RET_FOR_EVERY_STEP);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print(" Please verify ");
if (0 == kct202.getVerifyResponAndparse(finger_num)) {
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print("Identity comfirm");
delay(800);
digitalWrite(Electromagnet, LOW); // turn the Electromagnet on (HIGH is the voltage level)
delay(5000);
digitalWrite(Electromagnet, HIGH);
}
else {
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print(" Identity deny ");
// myservo.write(0);
delay(200);
u8x8.setCursor(0, 3);
u8x8.print(" Please retry ");
delay(1500);
digitalWrite(Electromagnet, HIGH); // turn the Electromagnet on (HIGH is the voltage level)
}
}
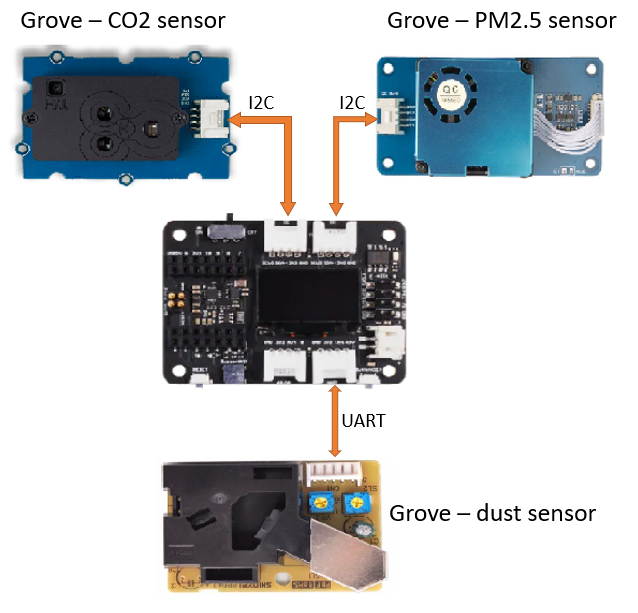
项目 5 - 空气质量传感器中心 - Seeed Studio XIAO 扩展底板
概述
这是一个环境检测设备,分别通过 Grove - 激光 PM2.5 传感器、Grove - CO2 & 温湿度传感器和 Grove - 粉尘传感器来收集 PM2.5、PM10、温度、湿度、CO2 和粉尘颗粒。
所需组件
-
Seeed Grove - CO2 & Temperature & Humidity Sensor for Arduino (SCD30) - 3-in-1
-
Seeed Grove - Laser PM2.5 Dust Sensor - Arduino Compatible - HM3301
硬件连接
请按照图表所示连接每个传感器。将 CO2 传感器和 PM2.5 传感器分别连接到两个 I2C 端口,并将灰尘传感器连接到 UART 端口。
Arduino 说明
步骤 1. 按照连接图将所有传感器连接到板上。
步骤 2. 下载 Aruidno IDE
步骤 3. 安装 u8g2、Seeed_PM2_5_sensor_HM3301 和 Seeed_SCD30 库,这是 如何安装库 的指南。
步骤 4. 复制代码粘贴到 Arduino IDE 中然后上传。
代码
#include <Arduino.h>
#include <U8x8lib.h>
#include <Seeed_HM330X.h>
#include "SCD30.h"
#define SERIAL_OUTPUT SerialUSB
#define SERIAL SerialUSB
int pin = 7;
unsigned long duration;
unsigned long starttime;
unsigned long sampletime_ms = 5000;//sampe 30s ;
unsigned long lowpulseoccupancy = 0;
float ratio = 0;
float concentration = 0;
const int buttonPin = 1;
int buttonState = 0;
int memu = 0;
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
HM330X sensor;
uint8_t buf[30];
const char* str[] = {"sensor num: ", "PM1.0 concentration(CF=1,Standard particulate matter,unit:ug/m3): ",
"PM2.5 concentration(CF=1,Standard particulate matter,unit:ug/m3): ",
"PM10 concentration(CF=1,Standard particulate matter,unit:ug/m3): ",
"PM1.0 concentration(Atmospheric environment,unit:ug/m3): ",
"PM2.5 concentration(Atmospheric environment,unit:ug/m3): ",
"PM10 concentration(Atmospheric environment,unit:ug/m3): ",
};
///////////////////////////////////////////////////////////////////
//PM2.5 concentration(Atmospheric environment,unit:ug/m3): value
///////////////////////////////////////////////////////////////////
HM330XErrorCode print_result(const char* str, uint16_t value) {
if (NULL == str) {
return ERROR_PARAM;
}
// SERIAL_OUTPUT.print(str);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 0);
u8x8.print("PM2.5: ");
u8x8.setCursor(7, 0);
u8x8.print(value);
u8x8.setCursor(11, 0);
u8x8.print("ug/m");
Serial.println(value);
return NO_ERROR;
}
HM330XErrorCode print_result_1(const char* str, uint16_t value) {
if (NULL == str) {
return ERROR_PARAM;
}
// SERIAL_OUTPUT.print(str);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 0);
u8x8.print("PM10: ");
u8x8.setCursor(7, 0);
u8x8.print(value);
u8x8.setCursor(11, 0);
u8x8.print("ug/m");
Serial.println(value);
return NO_ERROR;
}
/*parse buf with 29 uint8_t-data*/
HM330XErrorCode parse_result(uint8_t* data) {
uint16_t value = 0;
if (NULL == data) {
return ERROR_PARAM;
}
value = (uint16_t) data[6 * 2] << 8 | data[6 * 2 + 1];
print_result(str[6 - 1], value);
return NO_ERROR;
}
HM330XErrorCode parse_result2(uint8_t* data) {
uint16_t value = 0;
if (NULL == data) {
return ERROR_PARAM;
}
value = (uint16_t) data[7 * 2] << 8 | data[7 * 2 + 1];
print_result_1(str[7 - 1], value);
return NO_ERROR;
}
////////////////////////////////////////////////////////////////////
/*30s*/
void setup() {
Serial.begin(115200);
Wire.begin();
u8x8.begin();
u8x8.setFlipMode(0);
scd30.initialize();
pinMode(pin, INPUT);
pinMode(buttonPin, INPUT_PULLUP);
starttime = millis();//get the current time;
}
void loop() {
float result[3] = {0};
duration = pulseIn(pin, LOW);
lowpulseoccupancy = lowpulseoccupancy + duration;
buttonState = digitalRead(buttonPin);
if (buttonState == LOW) {
memu++;
delay(15);
if (memu == 2) {
memu = 0;
}
}
Serial.println(memu);
if (scd30.isAvailable() && memu == 0) {
scd30.getCarbonDioxideConcentration(result);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print("CO2: ");
u8x8.setCursor(5, 3);
u8x8.print(result[0]);
u8x8.setCursor(12, 3);
u8x8.print("pmm");
delay(1000);
}
if (sensor.read_sensor_value(buf, 29) && memu == 0) {
SERIAL_OUTPUT.println("HM330X read result failed!!!");
}
if(memu == 0){
parse_result(buf);
}
if ((millis() - starttime) > sampletime_ms && memu == 0) {
ratio = lowpulseoccupancy / (sampletime_ms * 10.0); // Integer percentage 0=>100
concentration = 1.1 * pow(ratio, 3) - 3.8 * pow(ratio, 2) + 520 * ratio + 0.62; // using spec sheet curve
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 6);
u8x8.print("Dust: ");
u8x8.setCursor(6, 6);
u8x8.print(concentration);
u8x8.setCursor(12, 6);
u8x8.print("pcs");
// Serial.println(concentration);
lowpulseoccupancy = 0;
starttime = millis();
}
if (scd30.isAvailable() && memu == 1) {
scd30.getCarbonDioxideConcentration(result);
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 3);
u8x8.print("Temp: ");
u8x8.setCursor(6, 3);
u8x8.print(result[1]);
u8x8.setCursor(10, 3);
u8x8.print(" C ");
u8x8.setCursor(0, 6);
u8x8.print("Humi: ");
u8x8.setCursor(5, 6);
u8x8.print(result[2]);
u8x8.setCursor(8, 6);
u8x8.print(" % ");
delay(1000);
}
if (sensor.read_sensor_value(buf, 29) && memu == 1) {
SERIAL_OUTPUT.println("HM330X read result failed!!!");
}
if(memu == 1){
parse_result2(buf);
}
}
项目 6 - Seeed Studio Expansion Base for XIAO - 心率
概述
这个简单且经济的项目基于 Seeed Studio Expansion Base for XIAO 来报告心率。 所使用的设备具有 I2C 双线接口,因此将布线保持在最低限度。
所需组件
硬件连接
如下图所示,将心率传感器连接到 XIAO 扩展板的 I2C 接口。
Arduino 说明
步骤 1. 按照连接图将所有传感器连接到板上。
步骤 2. 下载 Aruidno IDE
步骤 4. 复制代码粘贴到 Arduino IDE 中然后上传。
代码
#include <Arduino.h>
#include <U8x8lib.h>
#include <Wire.h>
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
void setup() {
Serial.begin(9600);
Serial.println("heart rate sensor:");
u8x8.begin();
u8x8.setFlipMode(1);
Wire.begin();
}
void loop() {
Wire.requestFrom(0xA0 >> 1, 1); // request 1 bytes from slave device
while (Wire.available()) { // slave may send less than requested
unsigned char c = Wire.read(); // receive heart rate value (a byte)
u8x8.setFont(u8x8_font_chroma48medium8_r);
// u8x8.setCursor(0, 3);
// u8x8.print("blood detecting ");
// delay(10000);
u8x8.setCursor(0, 3);
u8x8.print("HeartRate: ");
u8x8.setCursor(10, 3);
u8x8.print(c);
u8x8.setCursor(13, 3);
u8x8.print("bpm");
Serial.println(c);
}
delay(500);
}
资源
- [PDF]ETA1038
- [PDF]ETA3410
- [PDF]ETA6003
- [PDF]PCF8563T
- [PDF]Seeed Studio Expansion Base for XIAO_v1.0_SCH_200824
- [SCH]Seeed Studio Expansion Base for XIAO_v1.0_200824
- [BRD]Seeed Studio Expansion Base for XIAO_v1.0_200824
常见问题
Q1: XIAO 扩展板上的 PMIC 是否在 5V 引脚上输出电源?
PMIC 不输出电源;5V 直接来自 USB。5V 引脚上提供的电流等于 USB 连接可用的电流。
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。