SenseCAP Indicator - LoRa 应用开发
介绍
LoRa® 是一种长距离无线通信技术,专为在远距离传输少量数据而优化。它通过使用称为啁啾扩频(CSS)的方法在亚GHz频谱中调制无线电信号来工作。
Seeed Studio 的 SenseCAP Indicator(版本 D1L 和 D1Pro)包含内置的 LoRa 收发器模块(Semtech SX1262 LoRa® 芯片),使您的项目能够轻松添加低功耗无线连接。在这篇文章中,我们将介绍如何在两个 SenseCAP Indicator 板之间建立 LoRa 通信。
概述
这个演示展示了如何使用 Wio-E5 作为中介,在 SenseCAP Indicator 和 XIAO 板之间建立基本的 LoRa 通信。SenseCAP Indicator 从 XIAO 获取传感器数据,然后通过 Wio-E5 传输。传输的有效载荷随后被 SenseCAP Indicator 接收,解码并输出结果,并在其屏幕上显示数据。
无 LVGL 代码:代码 · GitHub
硬件
SenseCAP Indicator
从页面 深入了解硬件 中,我们可以看到 LoRa 收发器通过 SPI 接口连接到 ESP32-S3 MCU。
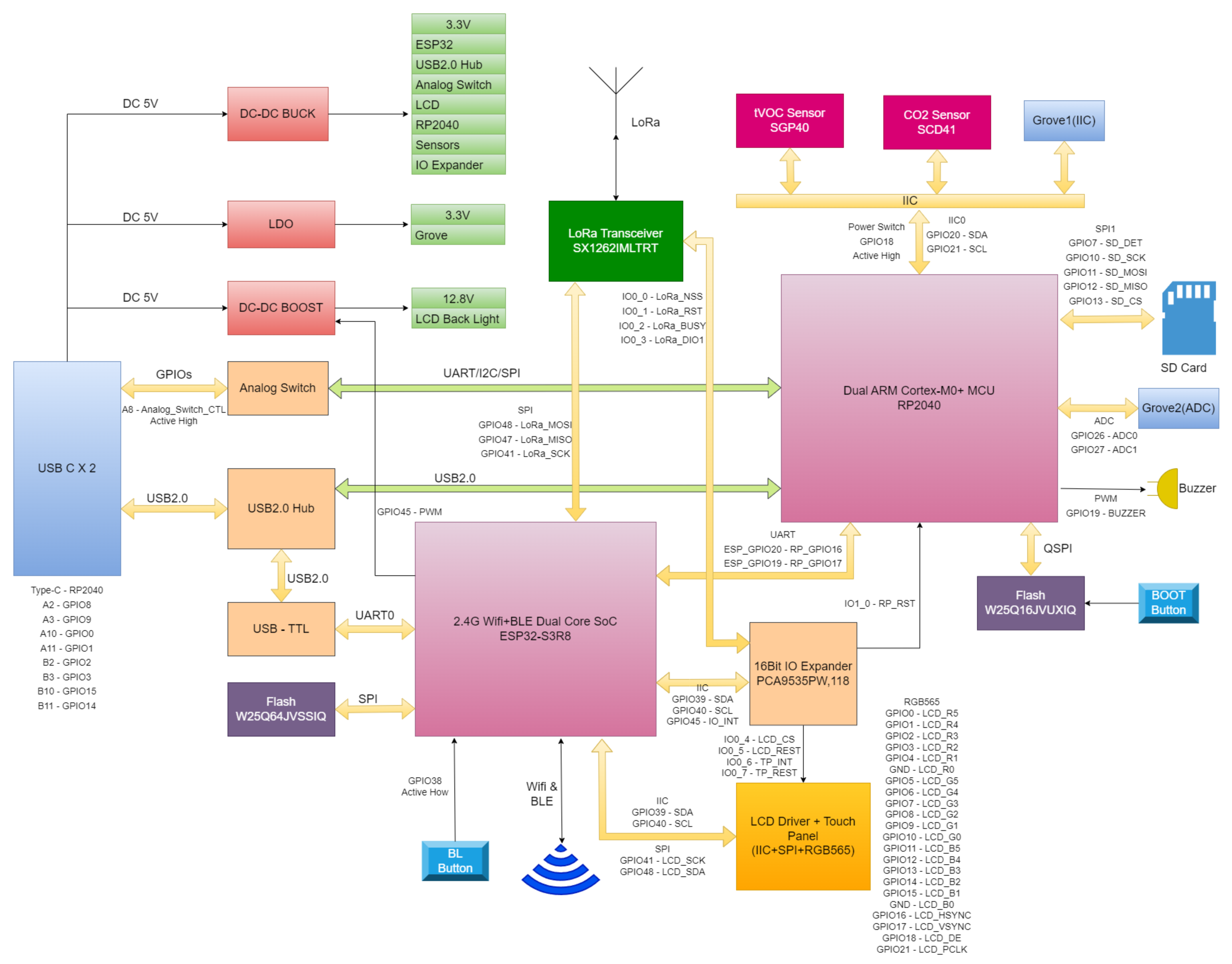
关键组件包括:
- Semtech SX1262 射频前端
- ESP32-S3 MCU
LoRa 收发器处理所有 LoRa 信号的低级调制和解调。我们可以通过 ESP32-S3 的 SPI 接口与其通信。
XIAO
此演示中的 XIAO 需要收集传感器数据并通过 Wio-E5 将其传输到 SenseCAP Indicator。XIAO 通过 UART 接口连接到 Wio-E5。
- XIAO
- Wio-E5
- SEN5x
软件
由于 SenseCAP_Indicator_ESP32 SDK 已经提供了 LoRa 库,我们可以直接使用它,您可以快速查看页面 LoRa® 了解如何使用 LoRa 库。
入门指南
此演示展示了如何为物联网连接设置本地 LoRa® 集线器。
先决条件
请按照说明设置开发环境。
步骤 1:下载演示代码
从此链接克隆或下载演示代码。此代码将作为您的 LoRa 应用程序的起点。
步骤 2:实现有效载荷编码器(XIAO;Arduino)
步骤 2.1:实现您的有效载荷结构和编码器
- XIAO/include/Frame.h
- XIAO/include/Frame.cpp
#ifndef _FRAME_H
#define _FRAME_H
#include <Arduino.h>
#include <vector>
/** payload format
* | topic | dataLength | Data Payload | CRC |
* | 1byte | 1byte | n byte | 2byte |
* example:
* | 0x01 | 0x0E | 14 bytes | 2byte | for SEN54
* | 0x01 | 0x10 | 16 bytes | 2byte | for SEN55
*/
#pragma pack(1)
enum topics {
TOPICS_MIN = 0x00,
TOPICS_SEN5x = 0x01,
TOPIC_MAX,
};
#pragma pack(1)
typedef struct
{
enum topics topic; /*msg type*/
uint8_t dataLength;
std::vector<uint8_t> data; /*actual data of payload*/
uint16_t crc;
} Frame_t;
String packFrame(Frame_t frame);
void deleteFrame(Frame_t *frame);
uint16_t crc16_ccitt(const uint8_t *data, size_t length);
#endif
#include "Frame.h"
String packFrame(Frame_t frame) {
uint8_t *packedData = (uint8_t *)malloc(2 + frame.dataLength + 2);
if (packedData == NULL) {
return String(); // Return an empty string if memory allocation fails
}
// Pack the frame topic
packedData[0] = frame.topic;
packedData[1] = frame.dataLength;
// Pack the data payload
for (size_t i = 0; i < frame.dataLength; i++) {
packedData[2 + i] = frame.data[i];
}
// Calculate CRC (for simplicity, we assume CRC is just the sum of all bytes)
frame.crc = crc16_ccitt(packedData, 2 + frame.dataLength);
// Pack the CRC
packedData[2 + frame.dataLength] = (frame.crc & 0xFF00) >> 8;
packedData[2 + frame.dataLength + 1] = frame.crc & 0x00FF;
// String packedFrame; serialize the packed data into a string
char packedFrameBuffer[(2 + frame.dataLength + 2) * 2];
for (size_t i = 0; i < 2 + frame.dataLength + 2; i++) {
snprintf(&packedFrameBuffer[i * 2], 3, "%02X", packedData[i]); // 3 to include null terminator
}
free(packedData);
return String(packedFrameBuffer);
}
void deleteFrame(Frame_t *frame) {
free(frame);
}
uint16_t crc16_ccitt(const uint8_t *data, size_t length) {
uint16_t crc = 0xFFFF;
for (size_t i = 0; i < length; i++) {
crc ^= (uint8_t)data[i] << 8;
for (uint8_t j = 0; j < 8; j++) {
if (crc & 0x8000) {
crc = (crc << 1) ^ 0x1021;
} else {
crc <<= 1;
}
}
}
return crc & 0xFFFF;
}
步骤 2.2:实现传感器数据结构并适配到载荷编码器
- XIAO/include/sensor_sen5x.h
- XIAO/src/sensor_sen5x.cpp
#ifndef PAYLOAD_SEN5X_H
#define PAYLOAD_SEN5X_H
#include "Frame.h"
#include "SensorPayload.h"
#include <SensirionI2CSen5x.h>
#define DEVICE_SEN54
#if defined(DEVICE_SEN54)
#elif defined(DEVICE_SEN55)
#else
#error "Please define a device in the compiler options."
#endif
class PayloadSEN5x : public SensorPayload<SensirionI2CSen5x> {
public:
PayloadSEN5x(SensirionI2CSen5x handler);
uint16_t init() override;
String toPayloadString() override;
private:
uint16_t massConcentrationPm1p0;
uint16_t massConcentrationPm2p5;
uint16_t massConcentrationPm4p0;
uint16_t massConcentrationPm10p0;
int16_t ambientHumidity;
int16_t ambientTemperature;
int16_t vocIndex;
#ifdef DEVICE_SEN55
// int16_t noxIndex; // Sensor SEN54 does not support NOx
#endif
SensirionI2CSen5x _sen5x;
};
#endif // PAYLOAD_SEN5X_H
#include "sensor_sen5x.h"
#include "main.h"
PayloadSEN5x::PayloadSEN5x(SensirionI2CSen5x handler)
: SensorPayload<SensirionI2CSen5x>(handler), _sen5x(handler) {
// Initialize specific data members for SEN5X here (if needed)
_sen5x.begin(Wire);
}
uint16_t PayloadSEN5x::init() {
// Implement the initialization logic for SEN5X here
uint16_t error;
char errorMessage[256];
error = _sen5x.deviceReset();
if (error) {
Serial.print("Error trying to execute deviceReset(): ");
errorToString(error, errorMessage, 256);
Serial.println(errorMessage);
}
float tempOffset = 0.0;
error = _sen5x.setTemperatureOffsetSimple(tempOffset);
if (error) {
Serial.print("Error trying to execute setTemperatureOffsetSimple(): ");
errorToString(error, errorMessage, 256);
Serial.println(errorMessage);
} else {
Serial.print("Temperature Offset set to ");
Serial.print(tempOffset);
Serial.println(" deg. Celsius (SEN54/SEN55 only)");
}
// Start Measurement
error = _sen5x.startMeasurement();
if (error) {
Serial.print("Error trying to execute startMeasurement(): ");
errorToString(error, errorMessage, 256);
Serial.println(errorMessage);
}
return 0;
}
String PayloadSEN5x::toPayloadString() {
// Add your code to convert data to payload string here
#ifdef DEVICE_SEN55
_sen5x.readMeasuredValuesAsIntegers(massConcentrationPm1p0, massConcentrationPm2p5, massConcentrationPm4p0, massConcentrationPm10p0, ambientHumidity, ambientTemperature, vocIndex, noxIndex);
_frame.dataLength = 16;
#else
int16_t __noxIndex;
_sen5x.readMeasuredValuesAsIntegers(massConcentrationPm1p0, massConcentrationPm2p5, massConcentrationPm4p0, massConcentrationPm10p0, ambientHumidity, ambientTemperature, vocIndex, __noxIndex);
_frame.dataLength = 14;
#endif
_frame.topic = TOPICS_SEN5x;
// empty the data vector
_frame.data.clear();
// make the value into hex payload string
_frame.data.push_back((uint8_t)(massConcentrationPm1p0 >> 8));
_frame.data.push_back((uint8_t)(massConcentrationPm1p0 & 0xFF));
_frame.data.push_back((uint8_t)(massConcentrationPm2p5 >> 8));
_frame.data.push_back((uint8_t)(massConcentrationPm2p5 & 0xFF));
_frame.data.push_back((uint8_t)(massConcentrationPm4p0 >> 8));
_frame.data.push_back((uint8_t)(massConcentrationPm4p0 & 0xFF));
_frame.data.push_back((uint8_t)(massConcentrationPm10p0 >> 8));
_frame.data.push_back((uint8_t)(massConcentrationPm10p0 & 0xFF));
_frame.data.push_back((uint8_t)(ambientHumidity >> 8));
_frame.data.push_back((uint8_t)(ambientHumidity & 0xFF));
_frame.data.push_back((uint8_t)(ambientTemperature >> 8));
_frame.data.push_back((uint8_t)(ambientTemperature & 0xFF));
_frame.data.push_back((uint8_t)(vocIndex >> 8));
_frame.data.push_back((uint8_t)(vocIndex & 0xFF));
#ifdef DEVICE_SEN55
// _frame.data.push_back((uint8_t)(noxIndex >> 8));
// _frame.data.push_back((uint8_t)(noxIndex & 0xFF));
#endif
char data[256];
sprintf(data, "%d,%d,%d,%d,%d,%d,%d", massConcentrationPm1p0, massConcentrationPm2p5, massConcentrationPm4p0, massConcentrationPm10p0, ambientHumidity, ambientTemperature, vocIndex);
Serial.println("String: " + String(data));
for (int i = 0; i < _frame.dataLength; i++) {
Serial.print(_frame.data[i], HEX);
Serial.print(" ");
}
Serial.println();
return packFrame(_frame);
}
函数 toPayloadString 将把数据序列化为字符串,该字符串将通过 Wio-E5 发送到 SenseCAP Indicator。
步骤 2.3:编译代码并上传到 XIAO
#include "sensor_sen5x.h"
#include "wio_e5_at.h"
#include <Arduino.h>
#include <SensirionI2CSen5x.h>
#include <Wire.h>
SoftwareSerial serial_lora( D2, D3 );
Radio radio( serial_lora, RF_FREQUENCY, LORA_SF12, LORA_BW_125, 15, 15, 14, LORA_CRC_ON, LORA_IQ_NORMAL, LORA_PUBLIC_OFF );
SensirionI2CSen5x sen5x;
PayloadSEN5x payloadSEN5x( sen5x );
void setup() {
delay( 2000 );
wait_serial();
Serial.println( "Starting..." );
radio.begin();
Wire.begin();
payloadSEN5x.init();
Serial.println( "APP begin" );
}
void loop() {
static int count = 0;
static unsigned long task_time = 0;
static String test_string;
if ( millis() - task_time > 10000 ) {
task_time = millis();
radio.sendPayload( payloadSEN5x.toPayloadString() );
Serial.printf( "Send data %d\r\n", count++ );
}
}
完成载荷后,现在我们将深入了解 SenseCAP Indicator 来编程载荷解码器。
步骤 3:实现载荷解码器(SenseCAP Indicator;ESP-IDF)
载荷解码器是一个将从 LoRa 收发器接收到的二进制载荷转换为人类可读格式的函数。载荷解码器特定于您的应用程序,必须由您实现。此演示的载荷解码器在演示代码中提供。
步骤 3.1:实现您的载荷解码器
- Indicator/main/Frame/frame.h
- Indicator/main/Frame/frame.c
#ifndef __SIMPLE_FRAME_H
#define __SIMPLE_FRAME_H
#include <stdint.h>
#include <stdio.h>
#include <stdlib.h>
/** payload format
* | topic | dataLength | Data Payload | CRC |
* | 1byte | 1byte | n byte | 2byte |
* example:
* | 0x01 | 0x0E | 14 bytes | 2byte | for SEN54
* | 0x01 | 0x10 | 16 bytes | 2byte | for SEN55
*/
#pragma pack(1)
enum topics {
TOPICS_MIN = 0x00,
TOPICS_SEN5x = 0x01,
TOPIC_MAX,
};
typedef struct
{
enum topics topic; /*msg type or DataId*/
uint8_t dataLength;
uint8_t *data; /*actual data of payload*/
uint16_t crc;
} Frame_t;
Frame_t *parsePayload( uint8_t *payload, uint8_t length );
void deleteFrame( Frame_t *frame );
uint16_t crc16_ccitt( const uint8_t *data, size_t length );
#endif
#include "frame.h"
#include "esp_log.h"
Frame_t *parsePayload( uint8_t *payload, uint8_t length )
{
Frame_t *frame = (Frame_t *)malloc( sizeof( Frame_t ) );
if ( frame == NULL ) {
ESP_LOGE( "parsePayload", "Failed to allocate memory for frame" );
return NULL;
}
frame->topic = (enum topics)payload[0];
frame->dataLength = payload[1];
frame->data = (uint8_t *)malloc( frame->dataLength );
if ( frame->data == NULL ) {
ESP_LOGE( "parsePayload", "Failed to allocate memory for frame data" );
free( frame ); // Clean up previously allocated memory
return NULL;
}
memcpy( frame->data, payload + 2, frame->dataLength );
frame->crc = (uint16_t)payload[length - 2] << 8 | (uint16_t)payload[length - 1];
if ( frame->crc != crc16_ccitt( payload, length - 2 ) ) {
ESP_LOGE( "parsePayload", "CRC mismatch" );
free( frame->data );
free( frame );
return NULL;
}
return frame;
}
void deleteFrame( Frame_t *frame )
{
free( frame->data );
free( frame );
}
uint16_t crc16_ccitt( const uint8_t *data, size_t length )
{
uint16_t crc = 0xFFFF;
for ( size_t i = 0; i < length; i++ ) {
crc ^= (uint8_t)data[i] << 8;
for ( uint8_t j = 0; j < 8; j++ ) {
if ( crc & 0x8000 ) {
crc = ( crc << 1 ) ^ 0x1021;
} else {
crc <<= 1;
}
}
}
return crc & 0xFFFF;
}
步骤 3.2:实现传感器数据结构
- Indicator/main/Sensors/sen5x.h
- Indicator/main/Sensors/sen5x.c
#ifndef PAYLOAD_SEN5X_H
#define PAYLOAD_SEN5X_H
#include "SensorPayload.h"
#define DEVICE_SEN54
#if defined( DEVICE_SEN54 )
#elif defined( DEVICE_SEN55 )
#else
#error "Please define a device in the compiler options."
#endif
#pragma pack(push, 1)
typedef union {
struct
{
uint16_t massConcentrationPm1p0;
uint16_t massConcentrationPm2p5;
uint16_t massConcentrationPm4p0;
uint16_t massConcentrationPm10p0;
int16_t ambientHumidity;
int16_t ambientTemperature;
int16_t vocIndex;
#ifdef DEVICE_SEN55
int16_t noxIndex;
#endif
};
#ifdef DEVICE_SEN55
int16_t data[8];
#else
int16_t data[7];
#endif
} SEN5xData_t;
#pragma pack(pop)
void phraseSEN5xData( uint8_t *data_arry, SEN5xData_t *SEN5x );
void prinSEN5xData( const SEN5xData_t *SEN5x );
#endif // PAYLOAD_SEN5X_H
#include "sen5x.h"
#include "esp_log.h"
void phraseSEN5xData( uint8_t *data_arry, SEN5xData_t *SEN5x )
{
for ( uint8_t i = 0; i < sizeof( SEN5xData_t ); i++ ) {
SEN5x->data[i] = data_arry[2 * i] << 8 | data_arry[2 * i + 1];
}
}
void prinSEN5xData( const SEN5xData_t *SEN5x )
{
static const char *TAG = "sen5x_";
ESP_LOGI( TAG, "massConcentrationPm1p0: %d", SEN5x->massConcentrationPm1p0 );
ESP_LOGI( TAG, "massConcentrationPm2p5: %d", SEN5x->massConcentrationPm2p5 );
ESP_LOGI( TAG, "massConcentrationPm4p0: %d", SEN5x->massConcentrationPm4p0 );
ESP_LOGI( TAG, "massConcentrationPm10p0: %d", SEN5x->massConcentrationPm10p0 );
ESP_LOGI( TAG, "ambientHumidity: %d", SEN5x->ambientHumidity );
ESP_LOGI( TAG, "ambientTemperature: %d", SEN5x->ambientTemperature );
ESP_LOGI( TAG, "vocIndex: %d", SEN5x->vocIndex );
#ifdef DEVICE_SEN55
ESP_LOGI( TAG, "noxIndex: %d", SEN5x->noxIndex );
#endif
}
步骤 3.3:配置 LoRa
设置 LoRa 参数
设置必要的 LoRa 参数,如频率、扩频因子和带宽。这些设置必须在两个 LoRa 通道之间匹配才能成功通信。
#define RF_FREQUENCY 868000000 // Hz
#define LORA_BANDWIDTH 0 // [0: 125 kHz, 1: 250 kHz, 2: 500 kHz, 3: Reserved]
#define LORA_SPREADING_FACTOR 12 // [SF7..SF12]
#define LORA_CODINGRATE 1 // [1: 4/5, 2: 4/6, 3: 4/7, 4: 4/8]
#define LORA_PREAMBLE_LENGTH 15 // Same for Tx and Rx
#define LORA_SYMBOL_TIMEOUT 5 // Symbols
#define LORA_FIX_LENGTH_PAYLOAD_ON false
#define LORA_IQ_INVERSION_ON false
设置 LoRa 收发器接收机
void OnRxDone( uint8_t *payload, uint16_t size, int16_t rssi, int8_t snr )
{
SEN5xData_t sen5x_data;
Frame_t *frame = parsePayload( payload, size );
if ( frame == NULL ) {
ESP_LOGE( TAG, "parsePayload error" );
return;
}
ESP_LOGI( TAG, "frame->type: %s", dataIDToString( frame->topic ) );
switch ( frame->topic ) {
case TOPICS_SEN5x:
phraseSEN5xData( frame->data, &sen5x_data );
break;
default:
break;
}
deleteFrame( frame );
}
Initinzie the LoRa Transceiver
RadioEvents.RxDone = OnRxDone;
Radio.Init( &RadioEvents );
Radio.SetChannel( RF_FREQUENCY );
Radio.SetRxConfig( MODEM_LORA, LORA_BANDWIDTH, LORA_SPREADING_FACTOR,
LORA_CODINGRATE, 0, LORA_PREAMBLE_LENGTH,
LORA_SYMBOL_TIMEOUT, LORA_FIX_LENGTH_PAYLOAD_ON,
0, true, 0, 0, LORA_IQ_INVERSION_ON, true );
Radio.SetMaxPayloadLength( MODEM_LORA, 255 );
Radio.Rx( 0 ); // Continuous Rx
步骤 3.4: 编译并将代码烧录到SenseCAP Indicator
/**
* @source: https://github.com/Seeed-Solution/indicator_lora_commu/blob/29624d10643a41ae5e1e24124b81e93b5e3cd3bb/Indicator/main/main.c
*/
#include "bsp_board.h"
#include "esp_log.h"
#include "frame.h"
#include "radio.h"
#include "sen5x.h"
static const char *TAG = "app_main";
#define VERSION "v0.0.1"
#define SENSECAP "\n\
_____ _________ ____ \n\
/ ___/___ ____ ________ / ____/ | / __ \\ \n\
\__ \\/ _ \\/ __ \\/ ___/ _ \\/ / / /| | / /_/ / \n\
___/ / __/ / / (__ ) __/ /___/ ___ |/ ____/ \n\
/____/\___/_/ /_/____/\___/\____/_/ |_/_/ \n\
--------------------------------------------------------\n\
Version: %s %s %s\n\
--------------------------------------------------------\n\
"
#define RF_FREQUENCY 868000000 // Hz
#define LORA_BANDWIDTH 0 // [0: 125 kHz, 1: 250 kHz, 2: 500 kHz, 3: Reserved]
#define LORA_SPREADING_FACTOR 12 // [SF7..SF12]
#define LORA_CODINGRATE 1 // [1: 4/5, 2: 4/6, 3: 4/7, 4: 4/8]
#define LORA_PREAMBLE_LENGTH 15 // Same for Tx and Rx
#define LORA_SYMBOL_TIMEOUT 5 // Symbols
#define LORA_FIX_LENGTH_PAYLOAD_ON false
#define LORA_IQ_INVERSION_ON false
static RadioEvents_t RadioEvents;
SEN5xData_t sen5x_data;
void OnRxDone( uint8_t *payload, uint16_t size, int16_t rssi, int8_t snr ) {
int i = 0;
ESP_LOGI( TAG, "rssi:%d dBm, snr:%d dB, len:%d, payload:", rssi, snr, size );
for ( i = 0; i < size; i++ ) {
printf( "0x%x ", payload[i] );
}
printf( "\n" );
Frame_t *frame = parsePayload( payload, size );
if ( frame == NULL ) {
ESP_LOGE( TAG, "parsePayload error" );
return;
}
ESP_LOGI( TAG, "frame->type: %s", dataIDToString( frame->topic ) );
switch ( frame->topic ) {
case TOPICS_SEN5x:
phraseSEN5xData( frame->data, &sen5x_data );
prinSEN5xData( &sen5x_data );
break;
default:
break;
}
deleteFrame( frame );
}
void app_main( void ) {
ESP_LOGI( "", SENSECAP, VERSION, __DATE__, __TIME__ );
ESP_ERROR_CHECK( bsp_board_init() );
ESP_LOGI( TAG, "APP MAIN START" );
RadioEvents.RxDone = OnRxDone;
Radio.Init( &RadioEvents );
Radio.SetChannel( RF_FREQUENCY );
Radio.SetRxConfig( MODEM_LORA, LORA_BANDWIDTH, LORA_SPREADING_FACTOR,
LORA_CODINGRATE, 0, LORA_PREAMBLE_LENGTH,
LORA_SYMBOL_TIMEOUT, LORA_FIX_LENGTH_PAYLOAD_ON,
0, true, 0, 0, LORA_IQ_INVERSION_ON, true );
Radio.SetMaxPayloadLength( MODEM_LORA, 255 );
Radio.Rx( 0 ); // Continuous Rx
while ( 1 ) {
vTaskDelay( pdMS_TO_TICKS( 10000 ) );
}
}
步骤 4:测试通信
给两块 SenseCAP Indicator 板子上电并打开串口监视器。您应该能看到两块板子之间发送和接收的消息。恭喜!您已经成功使用 SenseCAP Indicator 建立了 LoRa 通信。
String: 76,80,81,81,5389,5990,980
0 4C 0 50 0 51 0 51 15 D 17 66 3 D4
CRC: 629
<<<AT+TEST=TXLRPKT,"010E004C005000510051150D176603D40629"
>>>+TEST: TX DONE
+TEST: TXLRPKT
Send payload successfully
Send data 1
I (95490) app_main: rssi:-22 dBm, snr:5 dB, len:18, payload:
0x1 0xe 0x0 0x4c 0x0 0x50 0x0 0x51 0x0 0x51 0x15 0xd 0x17 0x66 0x3 0xd4 0x6 0x29
W (95541) parsePayload: topic: 1
W (95541) parsePayload: dataLength: 14
W (95545) parsePayload: payload[0]: 00
W (95549) parsePayload: payload[1]: 4C
W (95554) parsePayload: payload[2]: 00
W (95558) parsePayload: payload[3]: 50
W (95563) parsePayload: payload[4]: 00
W (95567) parsePayload: payload[5]: 51
W (95572) parsePayload: payload[6]: 00
W (95576) parsePayload: payload[7]: 51
W (95580) parsePayload: payload[8]: 15
W (95585) parsePayload: payload[9]: 0D
W (95589) parsePayload: payload[10]: 17
W (95594) parsePayload: payload[11]: 66
W (95598) parsePayload: payload[12]: 03
W (95603) parsePayload: payload[13]: D4
I (95607) app_main: frame->type: SEN5X
I (95612) sen5x_: massConcentrationPm1p0: 76
I (95617) sen5x_: massConcentrationPm2p5: 80
I (95622) sen5x_: massConcentrationPm4p0: 81
I (95627) sen5x_: massConcentrationPm10p0: 81
I (95632) sen5x_: ambientHumidity: 5389
I (95636) sen5x_: ambientTemperature: 5990
I (95641) sen5x_: vocIndex: 980
资源
| 名称 | 功能 |
|---|---|
| 蜂鸣器控制 | 接收字符串"ON"或"OFF",可以执行相应的功能 |
| PingPong | 在主设备和从设备之间建立乒乓通信模式。 |
| 多传感器数据上传 | XIAOS3 收集数据并利用 Wio-E5(带有 LoRa 模块和 AT 命令)将传感器数据上传到 Indicator。 |
更多详细信息,请参阅 README 文件。
技术支持
需要 SenseCAP Indicator 的帮助?我们随时为您提供支持!
如果您在学习本教程时遇到任何问题或有任何疑问,请随时联系我们的技术支持。我们随时为您提供帮助!
访问我们的 Seeed 官方 Discord 频道 提出您的问题,或访问 GitHub 讨论区 分享您想要的一切!