使用 SenseCAP A1101 训练水表数字识别模型
概述
在本教程中,我们将教您如何为特定应用训练自己的仪表模型,然后轻松将其部署到 SenseCAP A1101。让我们开始吧!
硬件准备
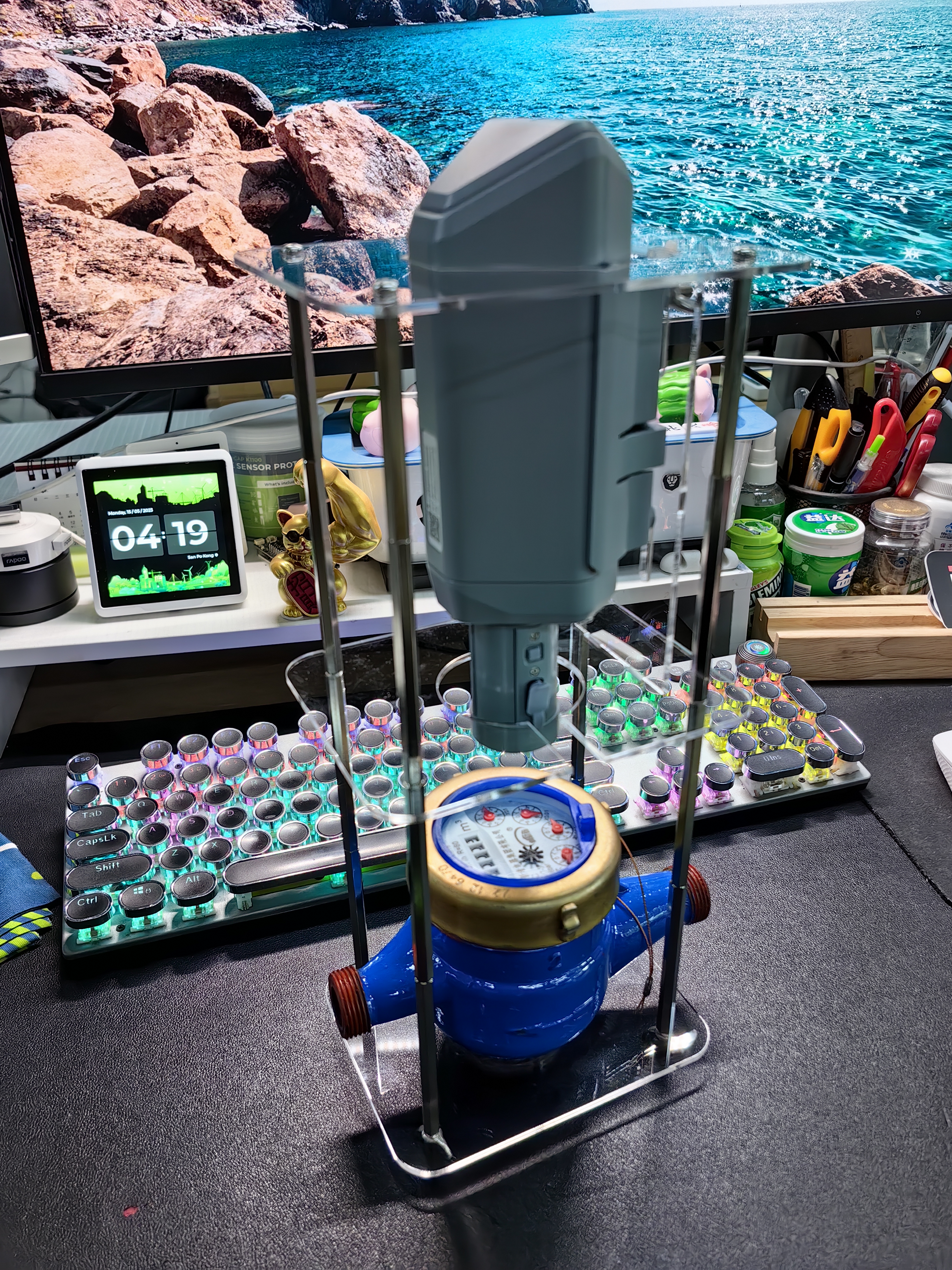
- SenseCAP A1101 - LoRaWAN Vision AI Sensor
- USB Type-C 数据线
- 可联网的 Windows/ Linux/ Mac 电脑
软件准备
在本教程中,我们将使用以下软件技术
- Roboflow - 用于标注
- SenseCraft Model Assistant - 用于训练
- TensorFlow Lite - 用于推理

现在让我们设置软件。Windows、Linux 和 Intel Mac 的软件设置相同,而 M1/M2 Mac 的设置会有所不同。
**什么是 SenseCraft Model Assistant?**Seeed Studio SenseCraft Model Assistant 是一个专注于嵌入式 AI 的开源项目。我们针对实际场景优化了 OpenMMLab 的优秀算法,使实现更加用户友好,在嵌入式设备上实现更快、更准确的推理。
Windows、Linux、Intel Mac
-
步骤 1. 确保计算机上已安装 Python。如果没有,请访问此页面下载并安装最新版本的 Python
-
步骤 2. 安装以下依赖项
pip3 install libusb1
M1/ M2 Mac
- 步骤 1. 安装 Homebrew
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
- 步骤 2. 安装 conda
brew install conda
- 步骤 3. 下载 libusb
wget https://conda.anaconda.org/conda-forge/osx-arm64/libusb-1.0.26-h1c322ee_100.tar.bz2
- 步骤 4. 安装 libusb
conda install libusb-1.0.26-h1c322ee_100.tar.bz2
1. 收集图像数据
- 步骤 1. 使用 USB Type-C 数据线将 SenseCAP A1101 连接到 PC

- 步骤 2. 双击启动按钮进入启动模式

之后,您将在文件资源管理器中看到一个名为 SENSECAP 的新存储驱动器
- 步骤 3. 将此 .uf2 文件拖放到 SENSECAP 驱动器
uf2 文件复制到驱动器后,驱动器将立即消失。这意味着 uf2 已成功上传到模块。
-
步骤 4. 复制并粘贴此 Python 脚本到您 PC 上新创建的名为 capture_images_script.py 的文件中
-
步骤 5. 执行 Python 脚本开始捕获图像
python3 capture_images_script.py
默认情况下,它将每 300ms 捕获一张图像。如果您想更改此设置,可以按以下格式运行脚本
python3 capture_images_script.py --interval <time_in_ms>
例如,每秒捕获一张图像
python3 capture_images_script.py --interval 1000
执行上述脚本后,SenseCAP A1101 将开始从内置摄像头连续捕获图像,并将所有图像保存在名为 save_img 的文件夹中

同时,在录制过程中会打开一个预览窗口。
捕获足够的图像后,点击终端窗口并按以下组合键停止捕获过程
- Windows: Ctrl + Break
- Linux: Ctrl + Shift + \
- Mac: CMD + Shift + \
图像收集后更改设备固件
完成数据集图像录制后,您需要确保将 SenseCAP A1101 内的固件更改回原始版本,以便再次加载目标检测模型进行检测。现在让我们来看看步骤。
-
步骤 1. 如前所述,在 SenseCAP A1101 上进入启动模式
-
步骤 2. 根据您的设备将此 .uf2 文件拖放到 SENSECAP 驱动器
uf2 文件复制到驱动器后,驱动器将立即消失。这意味着 uf2 已成功上传到模块。
2. 使用 RoboFlow 生成数据集
Roboflow 是一个基于在线的标注工具。在这里,我们可以直接将录制的视频素材导入 Roboflow,它将导出为一系列图像。这个工具非常方便,因为它可以帮助我们将数据集分配到"训练、验证和测试"中。此外,该工具还允许我们在标记图像后对这些图像进行进一步处理。此外,它可以轻松将标记的数据集导出为 COCO 格式,这正是我们所需要的!
-
步骤 1. 点击这里注册 Roboflow 账户
-
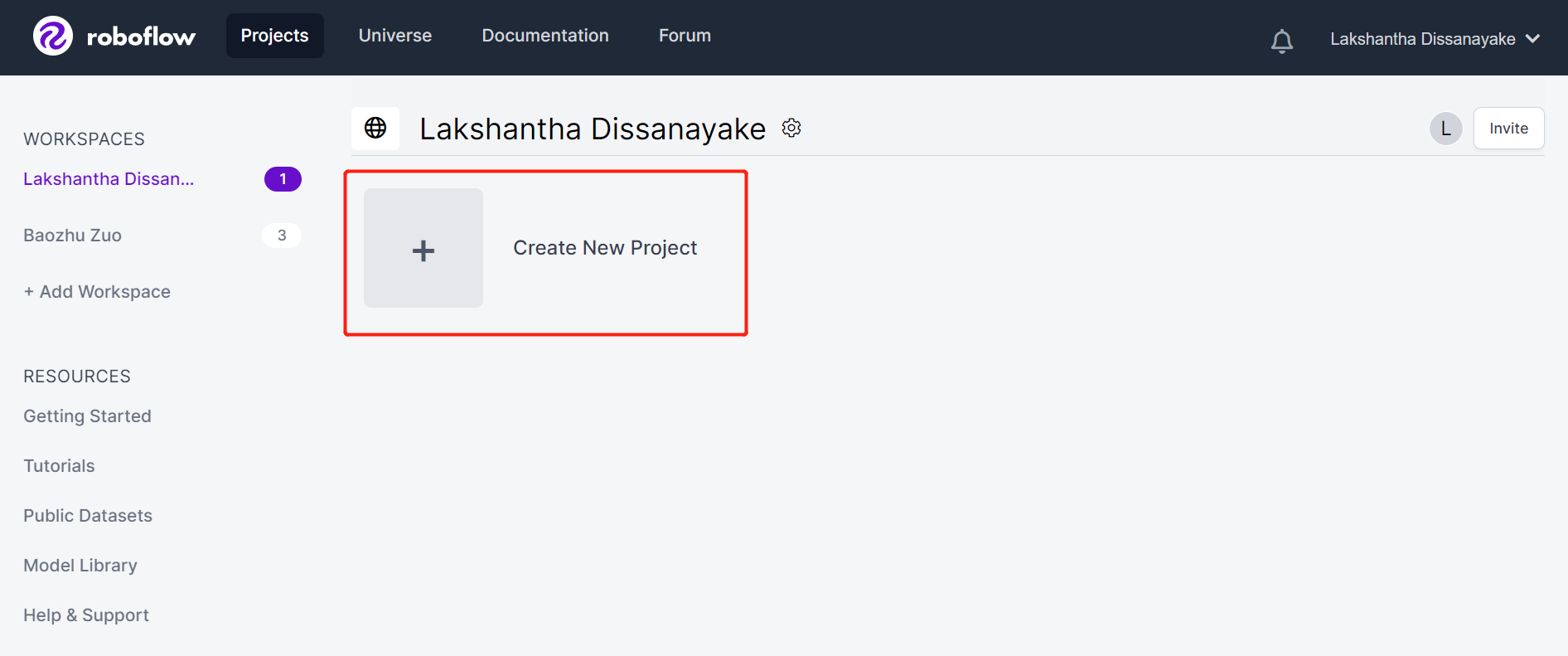
步骤 2. 点击 Create New Project 开始我们的项目
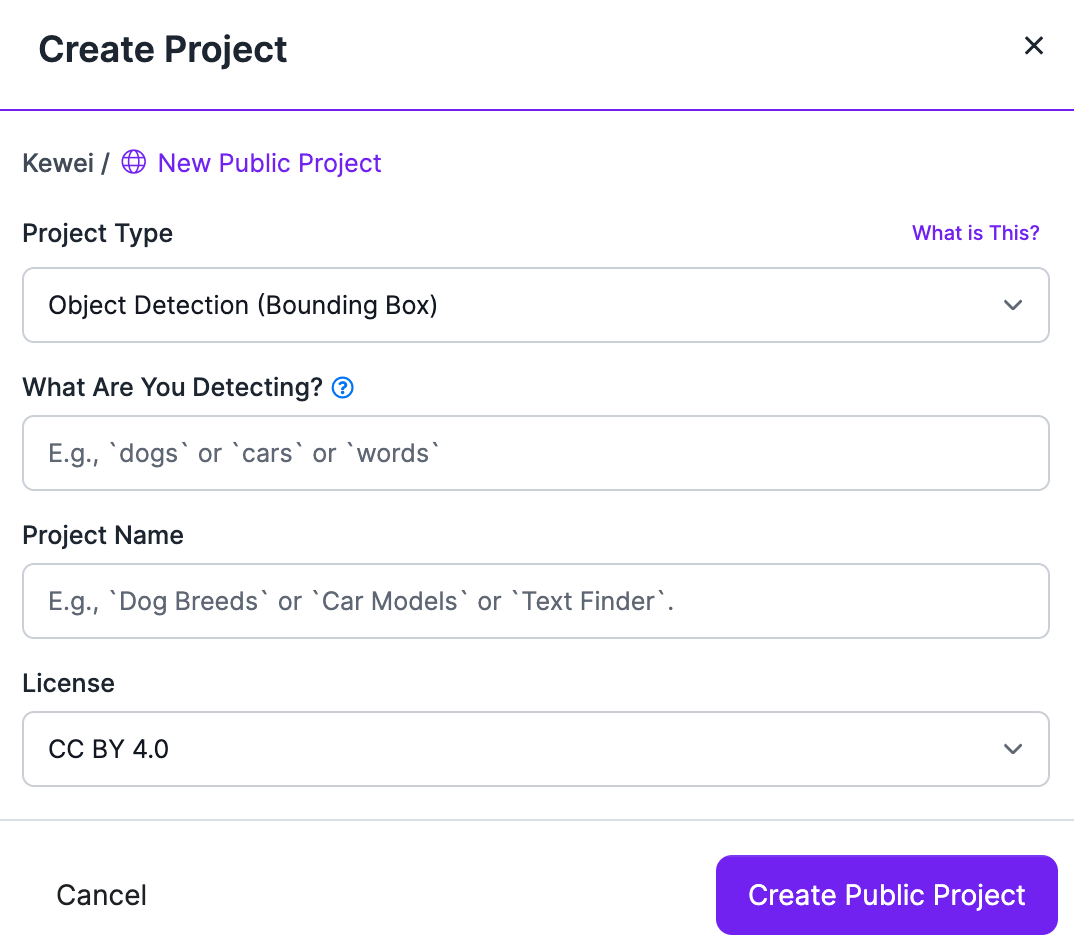
- 步骤 3. 填写 Project Name,保持 License (CC BY 4.0) 和 Project type (Object Detection (Bounding Box)) 为默认设置。在 What will your model predict? 列下,填写标注组名称。
- 步骤 4. 拖放您使用 SenseCAP A1101 捕获的图像
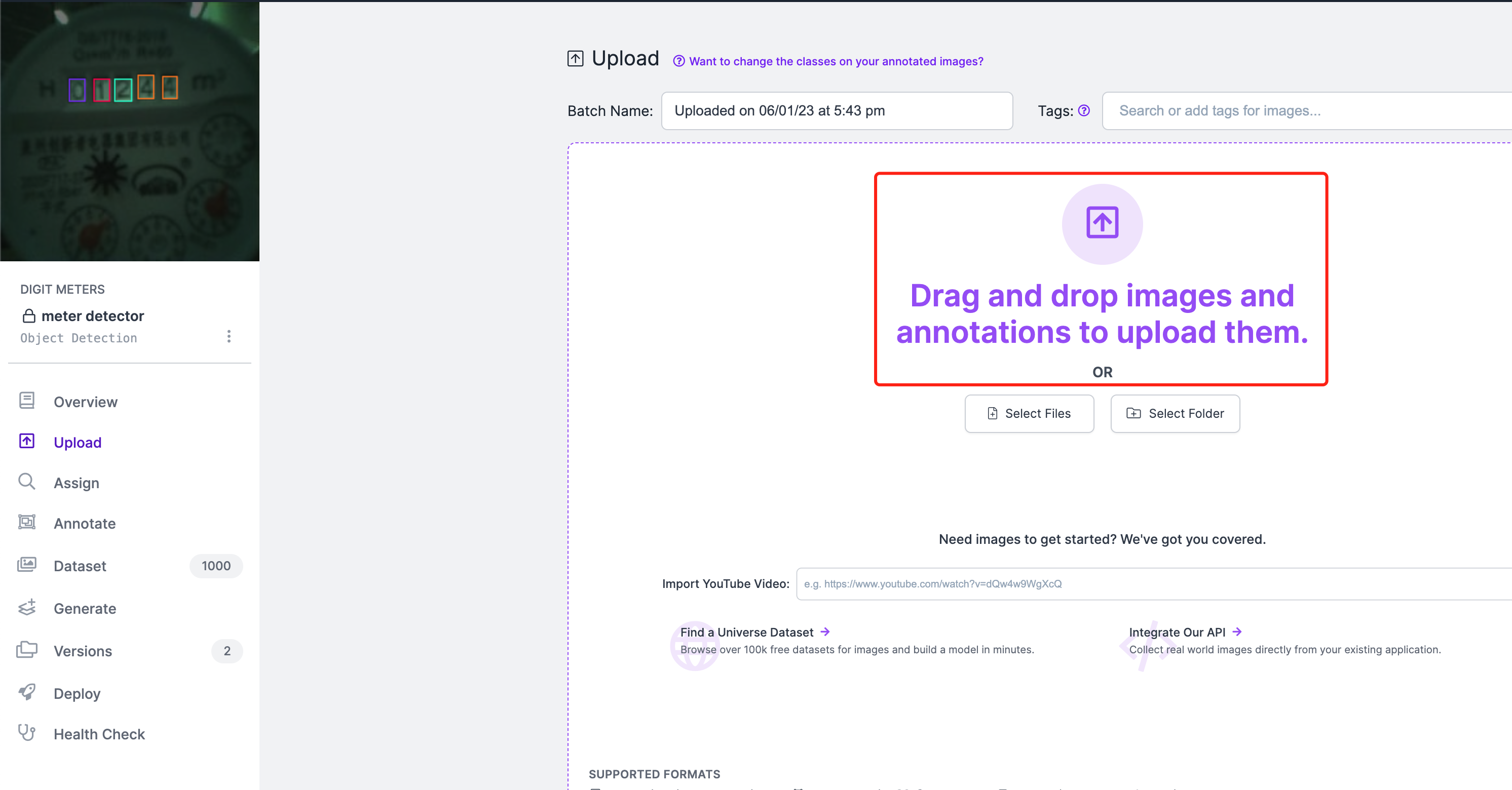
- 步骤 5. 图像处理完成后,点击 Finish Uploading。耐心等待图像上传完成。
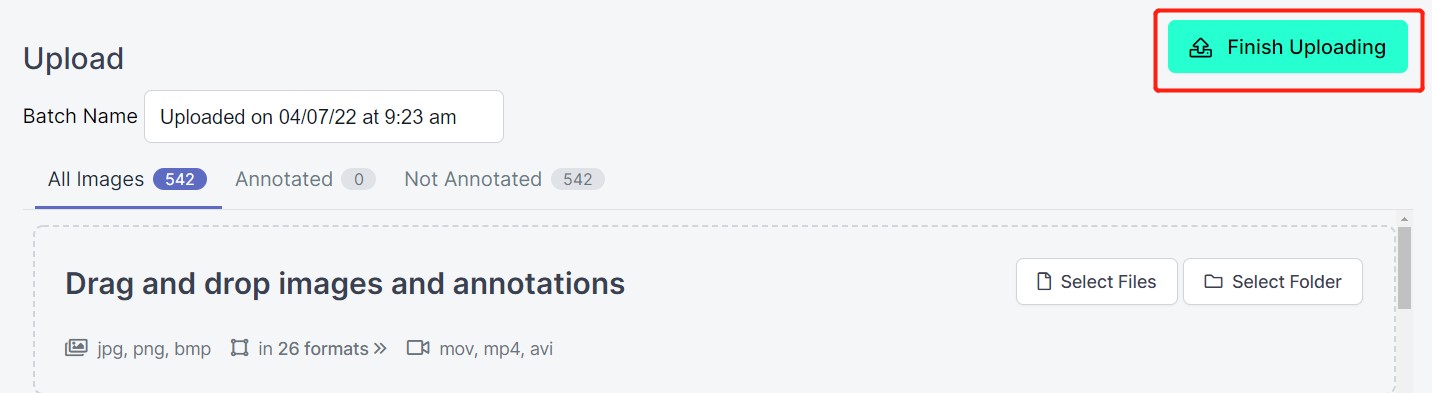
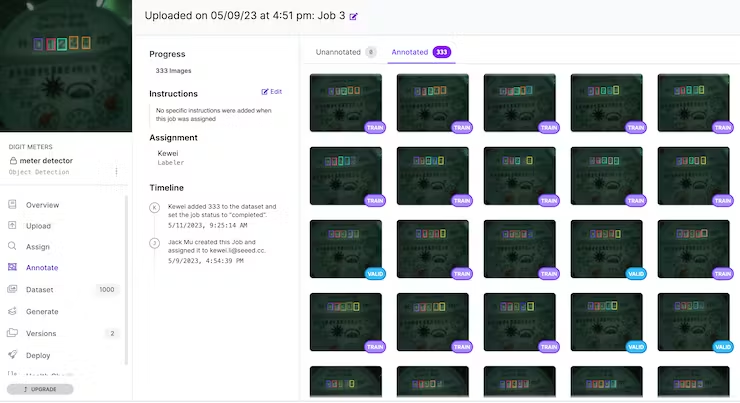
- 步骤 6. 图像上传完成后,点击 Assign Images
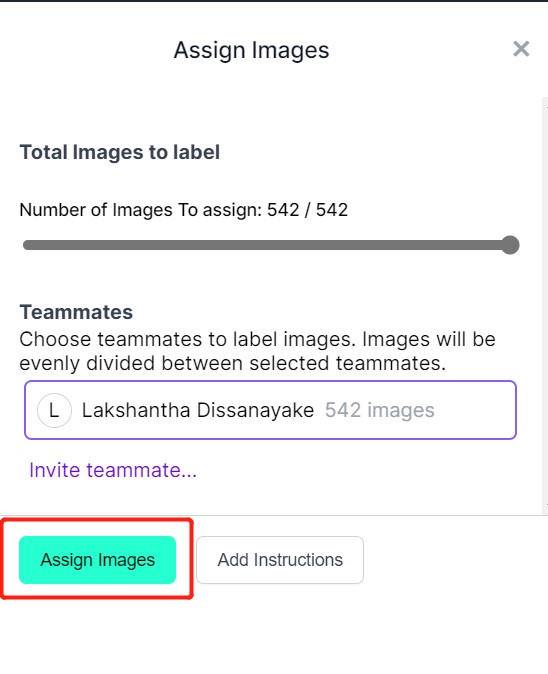
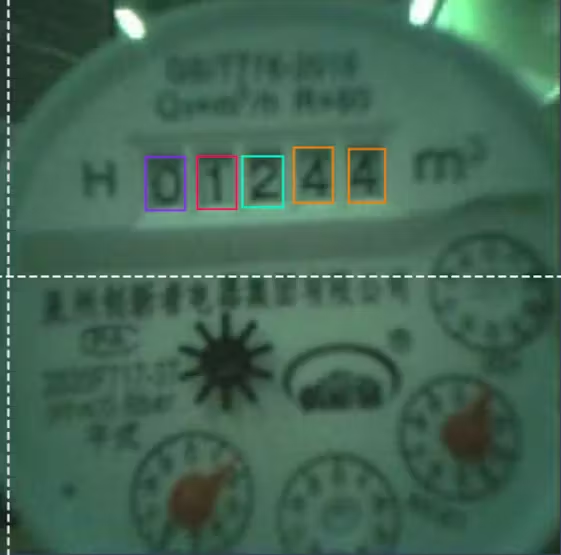
- 步骤 7. 选择一张图像,在数字周围绘制矩形框,选择标签为 digits 并按 ENTER
- 步骤 8. 对其余图像重复相同操作
-
步骤 9. 继续标注数据集中的所有图像
-
步骤 10. 标记完成后,点击 Add images to Dataset

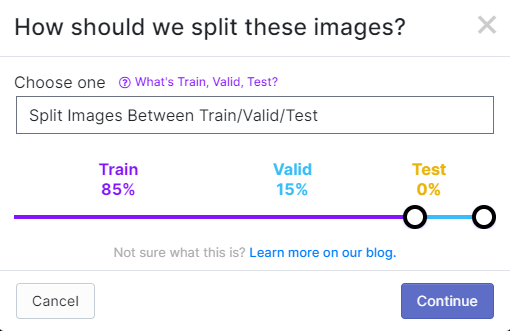
- 步骤 11. 接下来我们将在"Train、Valid 和 Test"之间分割图像。如果数据集较多,可以是 80/20。如果数据集较少,可以是 85/15。请注意"Train"不应少于 80。
- 步骤 12. 点击 Generate New Version

- 步骤 13. 现在您可以根据需要添加 Preprocessing 和 Augmentation。在这里我们将更改 Resize 选项为 192x192
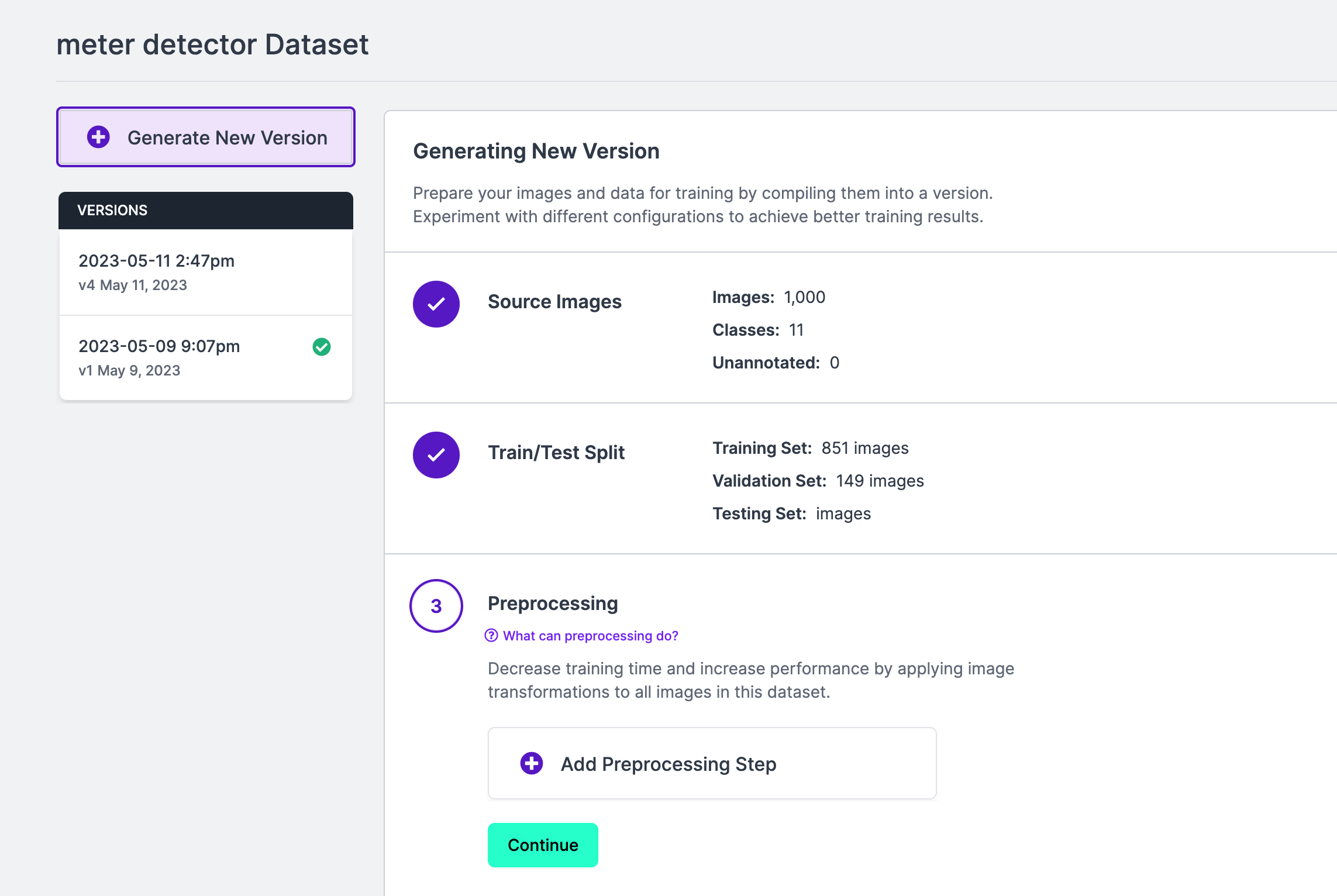
在这里我们将图像大小更改为 192x192,因为我们将使用该尺寸进行训练,训练会更快。否则,在训练过程中必须将所有图像转换为 192x192,这会消耗更多 CPU 资源并使训练过程变慢。
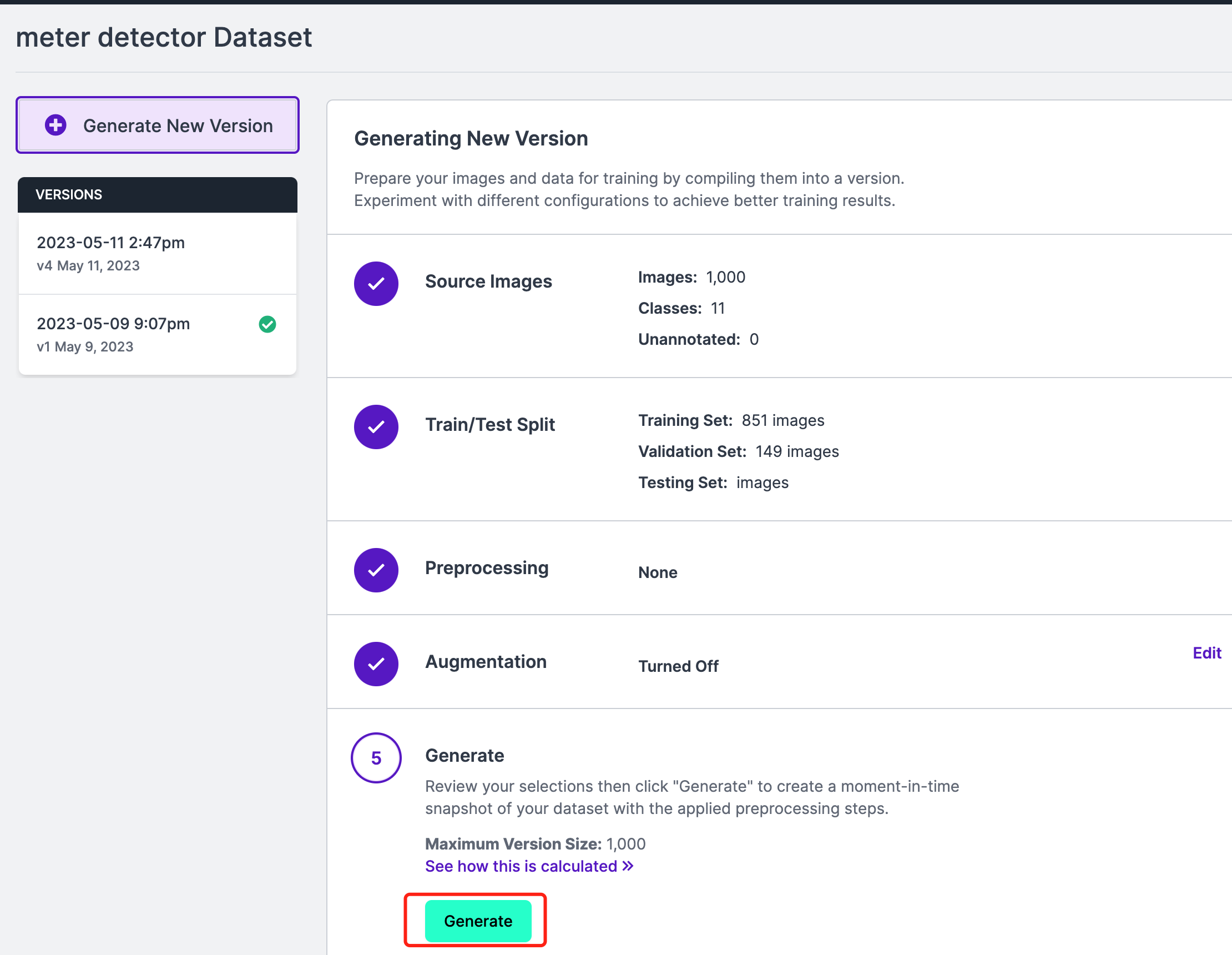
- 步骤 14. 接下来,继续使用其余默认设置并点击 Generate
- 步骤 15. 点击 Export,选择 Format 为 COCO,选择 show download code 并点击 Continue
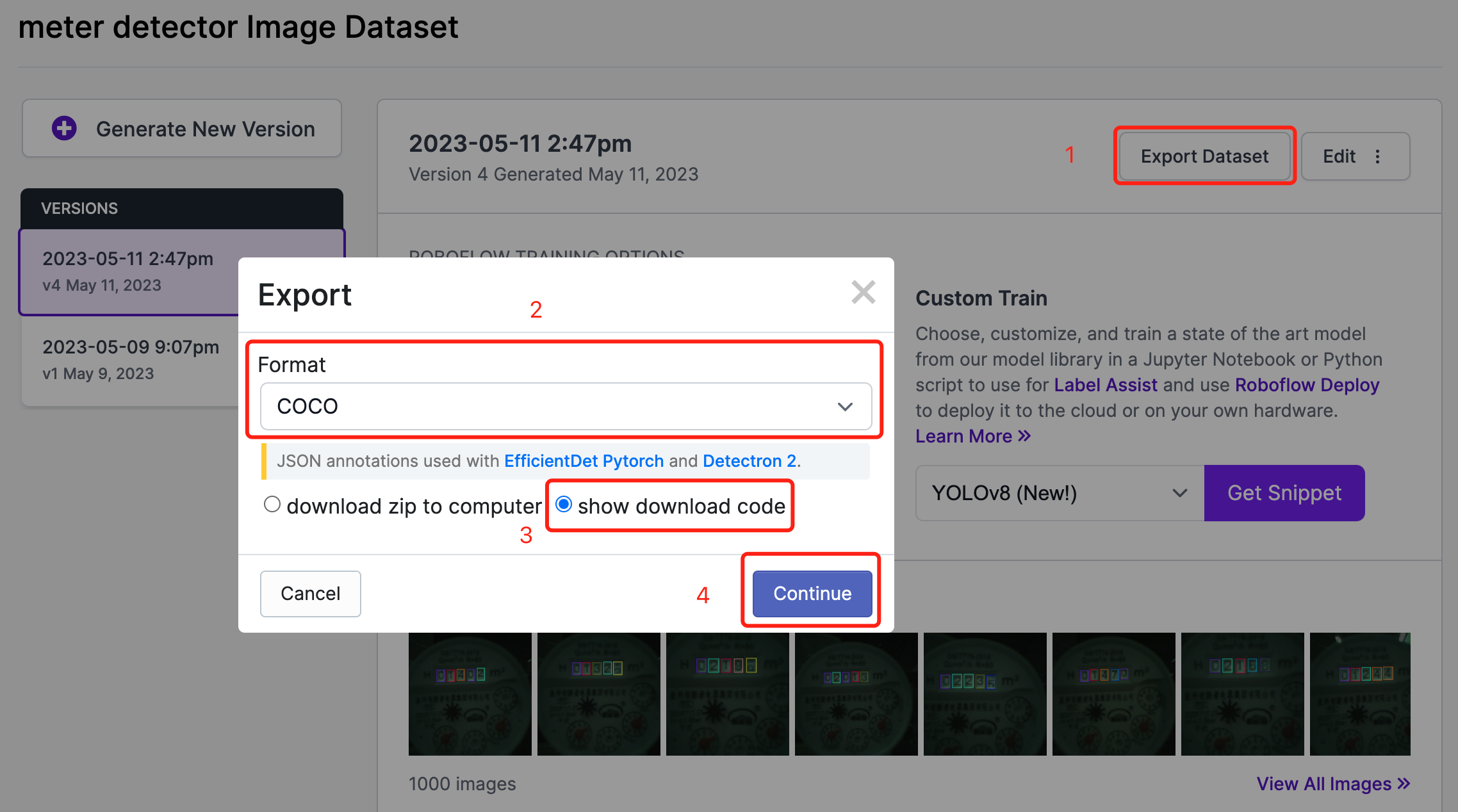
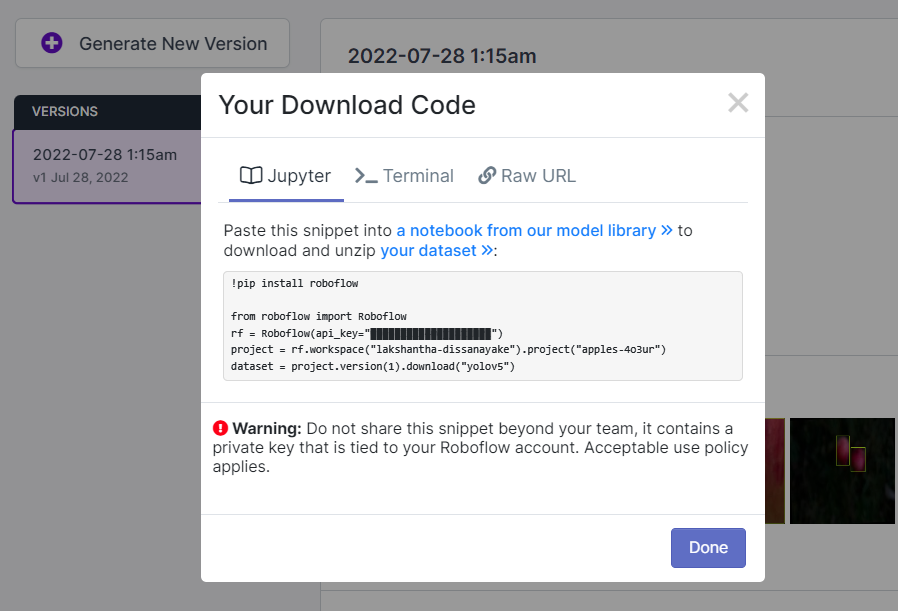
这将生成一个代码片段,我们稍后将在 Google Colab 训练中使用。所以请保持此窗口在后台打开。
在 Google Colab 上使用 SenseCraft Model Assistant 进行训练
选择公共数据集后,我们需要训练数据集。在这里我们使用 Google Colaboratory 环境在云端执行训练。此外,我们在 Colab 中使用 Roboflow API 轻松下载我们的数据集。
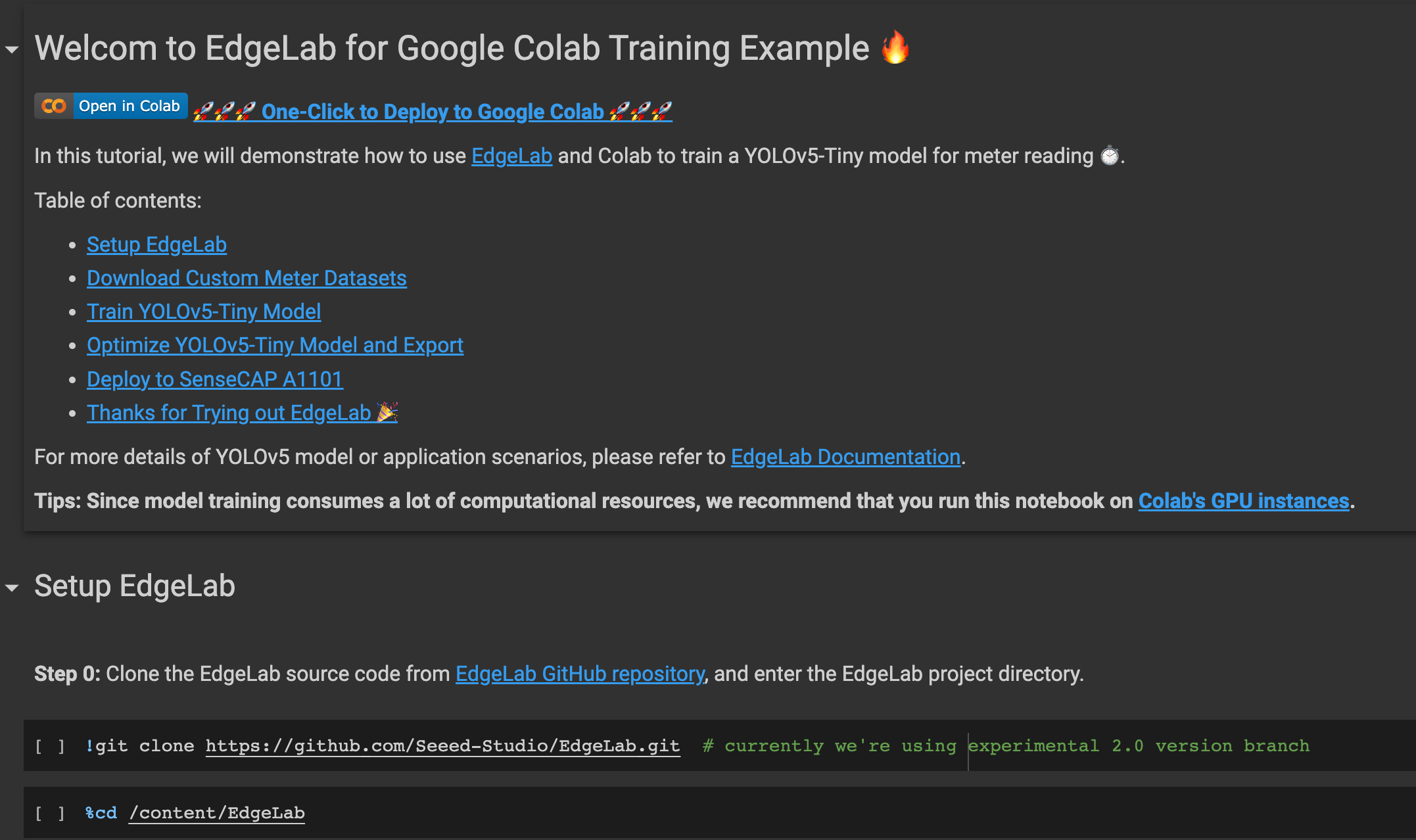
点击这里打开一个已准备好的 Google Colab 工作空间,按照工作空间中提到的步骤逐一运行代码单元。
注意: 在 Google Colab 中,在 Step 4 下的代码单元中,您可以直接复制上述 Roboflow 中提到的代码片段
它将演示以下内容:
- 设置训练环境
- 下载数据集
- 执行训练
- 下载训练好的模型
3. 部署训练好的模型并执行推理
现在我们将把在训练结束时获得的 model-1.uf2 移动到 SenseCAP A1101 中。
-
步骤 1. 安装最新版本的 Google Chrome 或 Microsoft Edge browser 并打开它
-
步骤 2. 通过 USB Type-C 线缆将 SenseCAP A1101 连接到您的 PC
- 步骤 3. 双击 SenseCAP A1101 上的启动按钮以进入大容量存储模式
之后,您将在文件资源管理器中看到一个新的存储驱动器显示为 SENSECAP
- 步骤 4. 将 model-1.uf2 文件拖放到 SENSECAP 驱动器
一旦 uf2 文件完成复制到驱动器,驱动器将消失。这意味着 uf2 已成功上传到模块。
注意: 如果您有 4 个模型文件准备就绪,您可以逐个拖放每个模型。先放第一个模型,等待它完成复制,再次进入启动模式,放第二个模型,以此类推。如果您只将一个模型(索引为 1)加载到 SenseCAP A1101 中,它将加载该模型。
- 步骤 5. 点击这里打开相机流的预览窗口
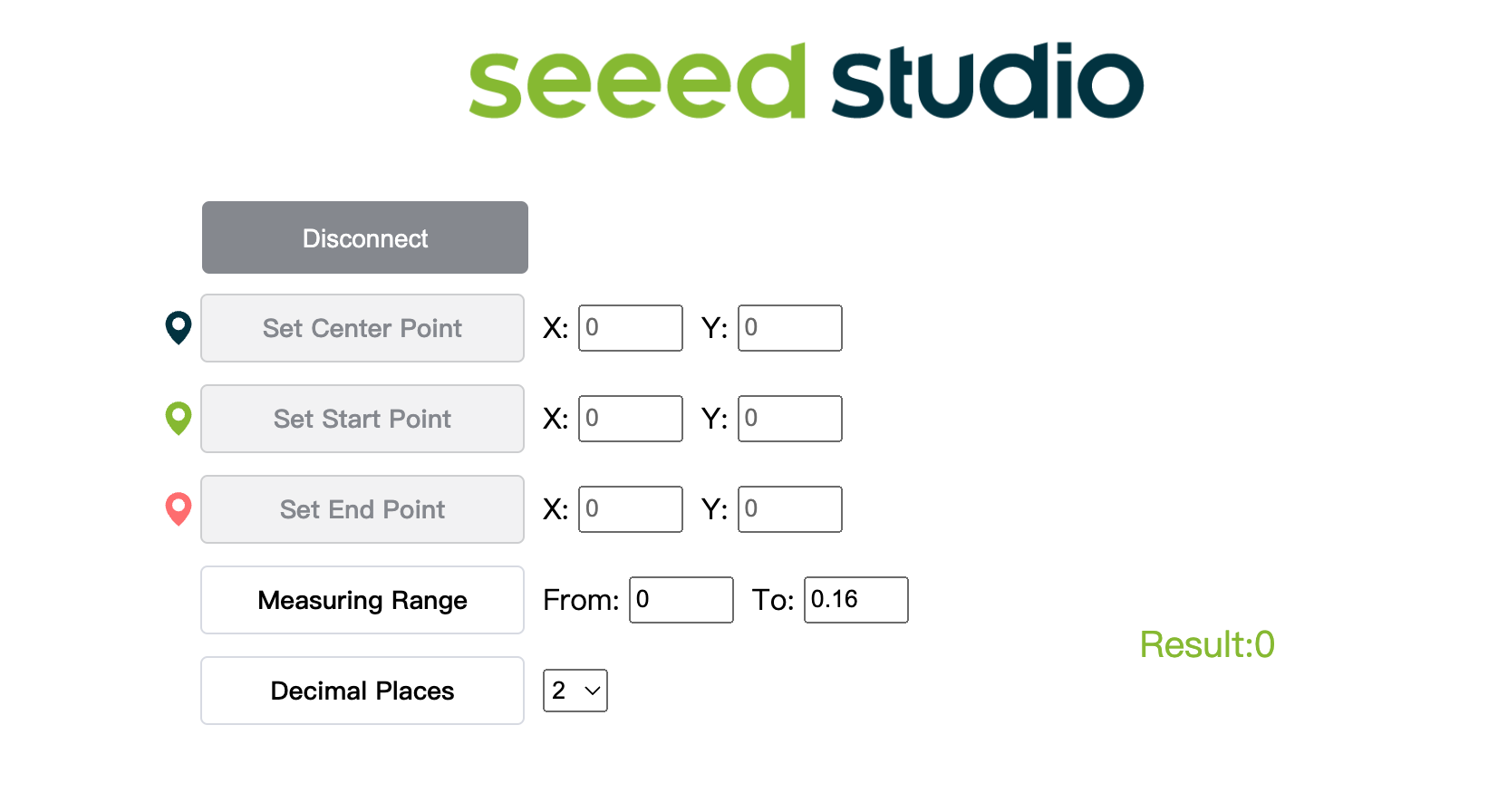
- 步骤 6. 点击 Connect 按钮。然后您将在浏览器中看到一个弹出窗口。选择 SenseCAP Vision AI - Paired 并点击 Connect
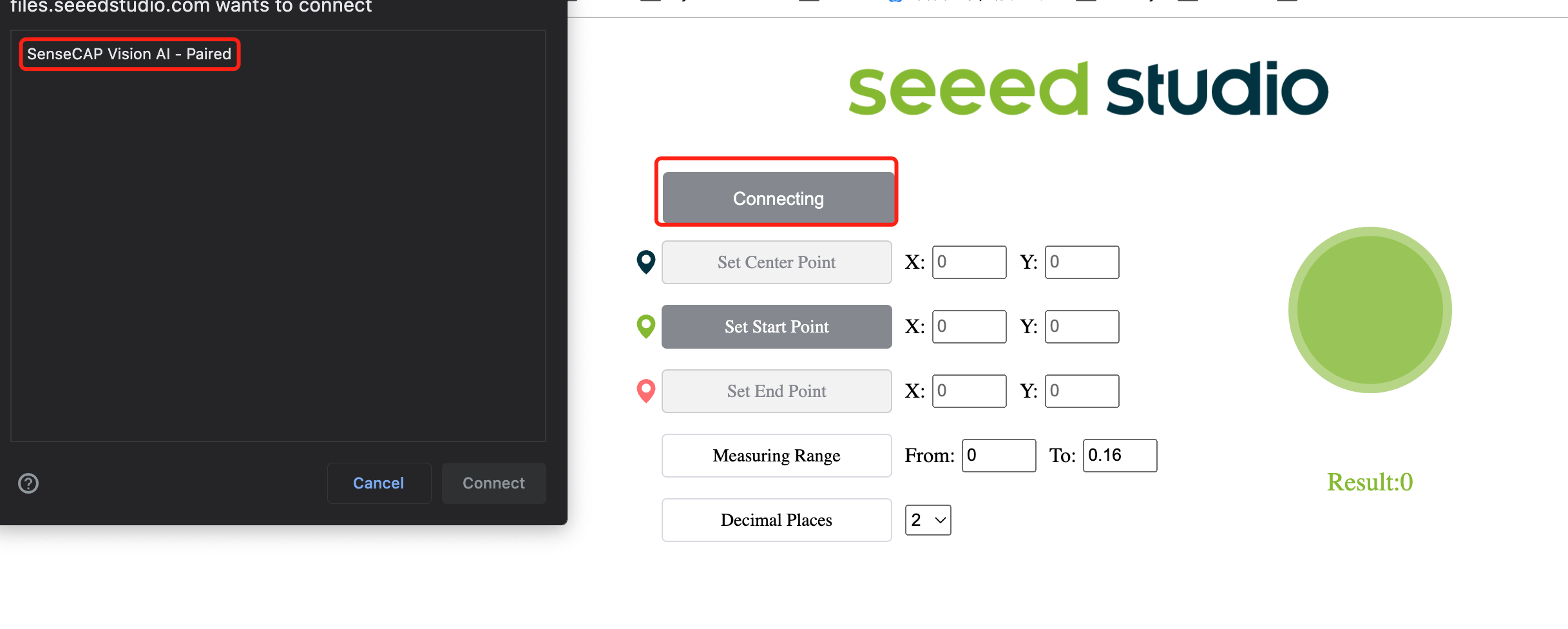
- 步骤 7. 使用预览窗口查看实时推理结果!
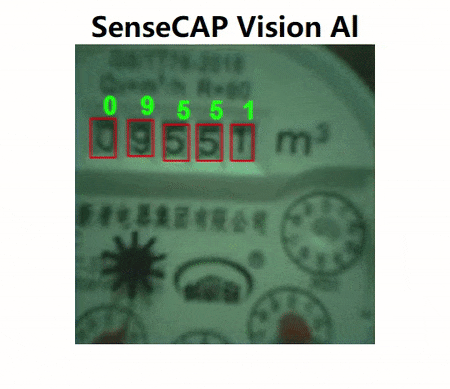
如上所示,数字正在被检测到,并且周围有边界框。
4. 在 SenseCAP Mate 上使用 SenseCAP A1101 执行推理
除了在浏览器上执行推理外,我们还可以使用 SenseCAP Mate 来实现模型推理,我们将逐步实现它。
-
步骤 1. 首先,我们需要擦除 A1101 的固件,这可以通过使用 erase_model.uf2 来实现。然后将 A1101 固件升级到最新版本,并将水表数字识别模型放入 A1101
固件: erase_model.uf2、SenseCAP-A1101_v02-00.uf2
模型: water_meter.uf2、pfld_meter.uf2、digital_meter.uf2
注意: water_meter 和 digital_meter 在桌面上都识别模型名称为 user-define6,在 APP 端显示 digital_meter。pfld_meter 识别的模型名称为 user-define5,在 APP 端显示 Point_meter。用户在部署过程中需要根据实际使用需求上传模型
-
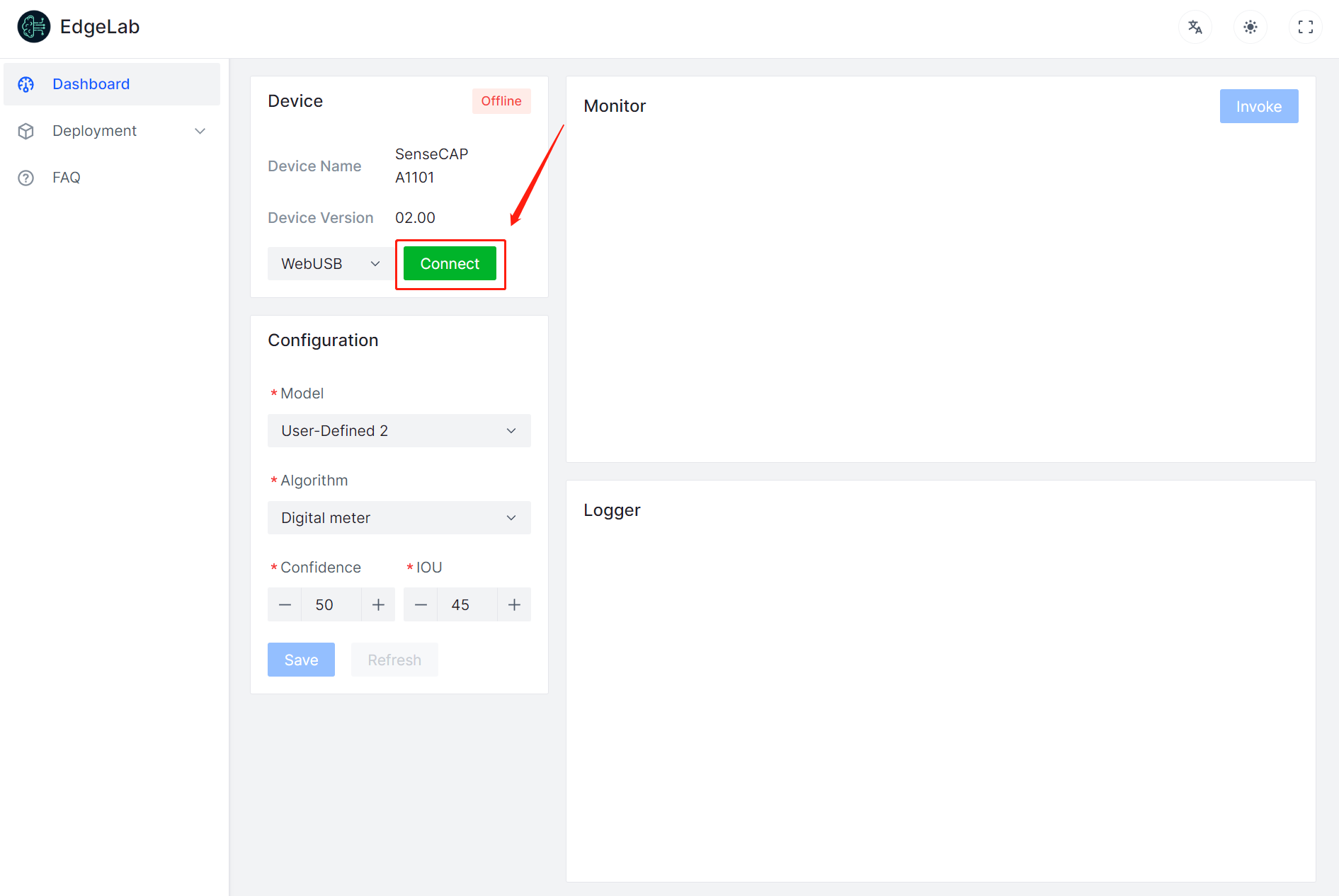
步骤 2. 点击这里打开相机流的预览窗口
-
步骤 3. 点击 Connect 按钮。然后您将在浏览器中看到一个弹出窗口。选择 SenseCAP A1101 - Paired 并点击 Connect
- 步骤 4(可选). 在 Model 中选择 Digital Meter,在 Algorithm 中选择 Digital Meter,点击 Save 然后点击 Invoke。现在我们可以使用预览窗口查看实时推理结果。
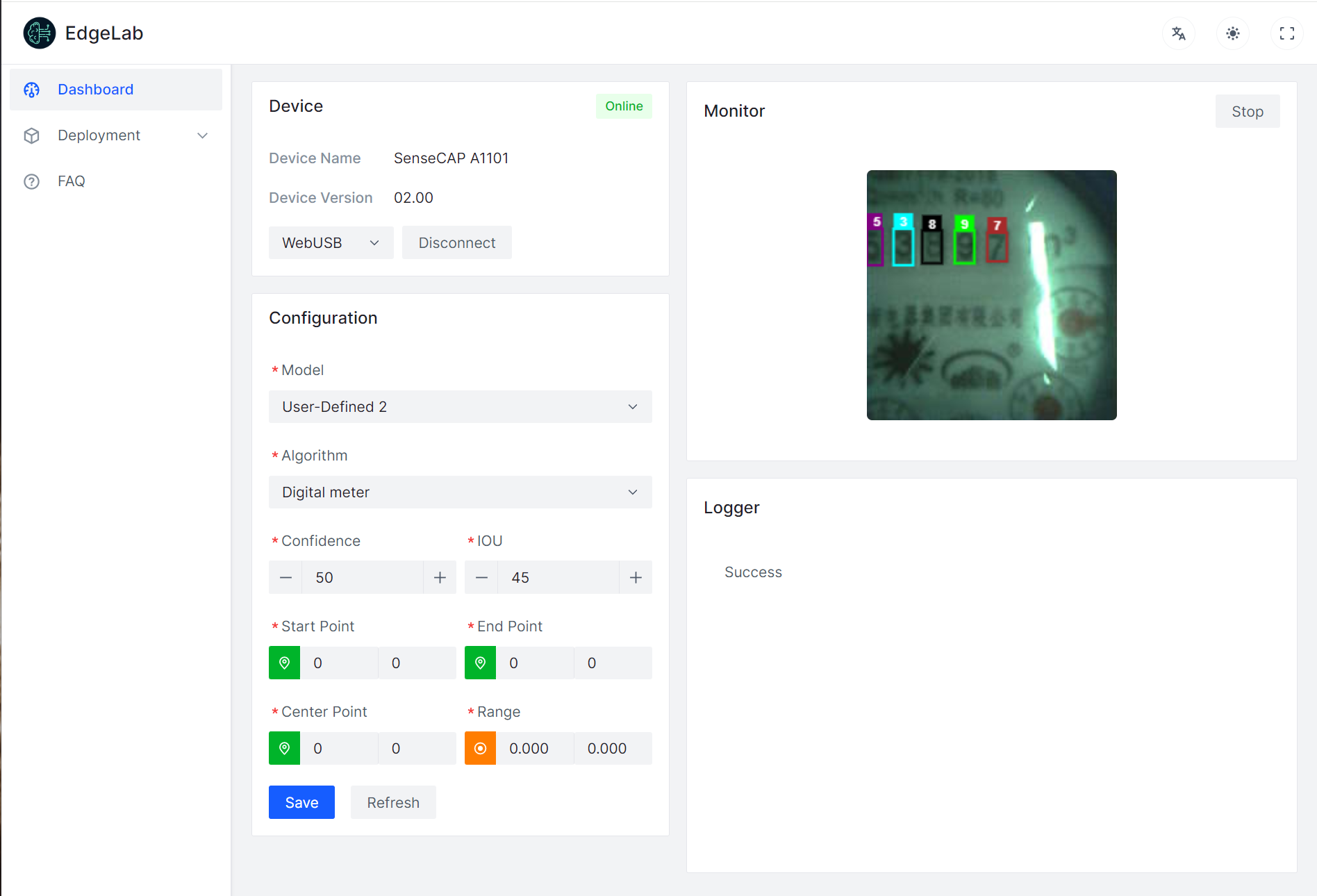
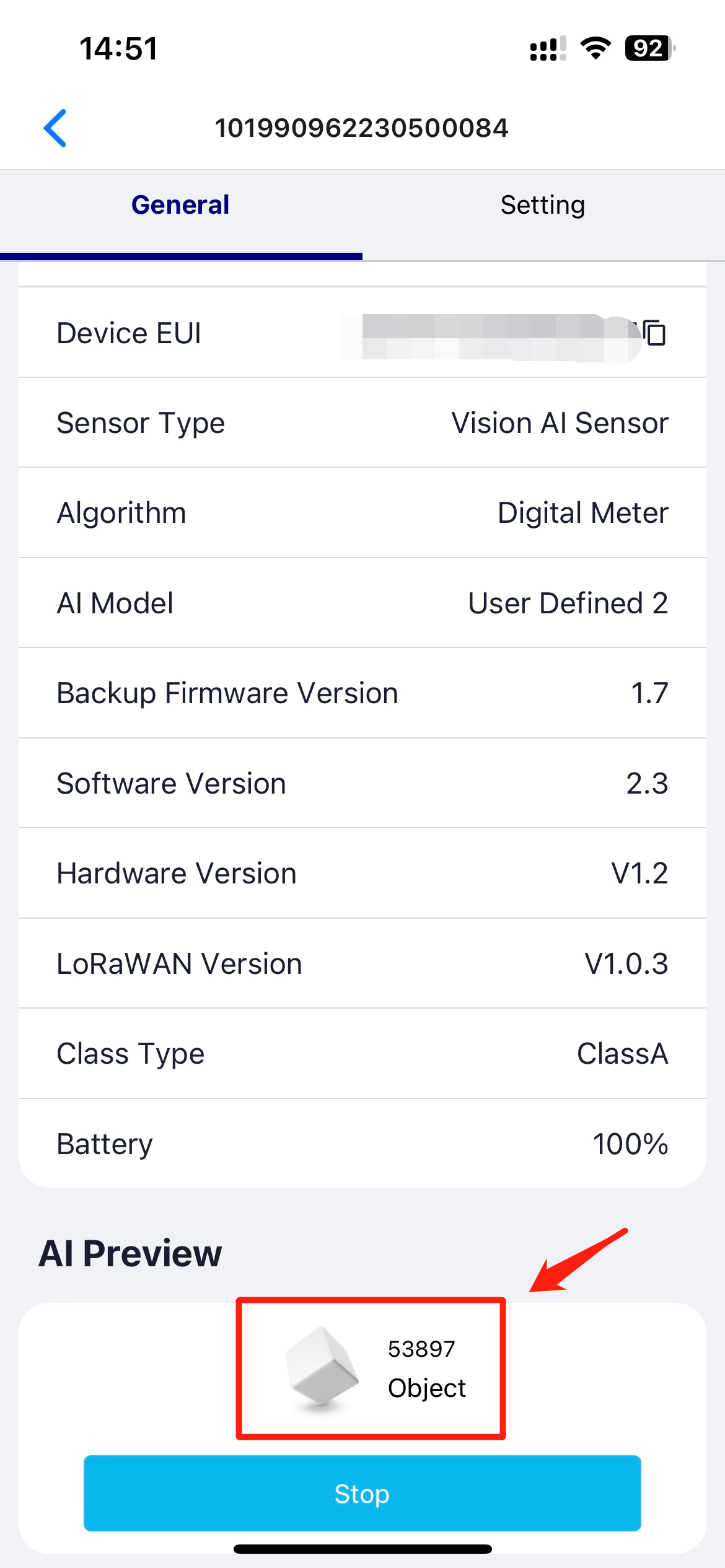
- 步骤 5. 打开 SenseCAP Mate 并与您自己的 A1101 配对,选择与上述相同的 Model 和 Algorithm。然后点击 General 并点击底部的 Detect。
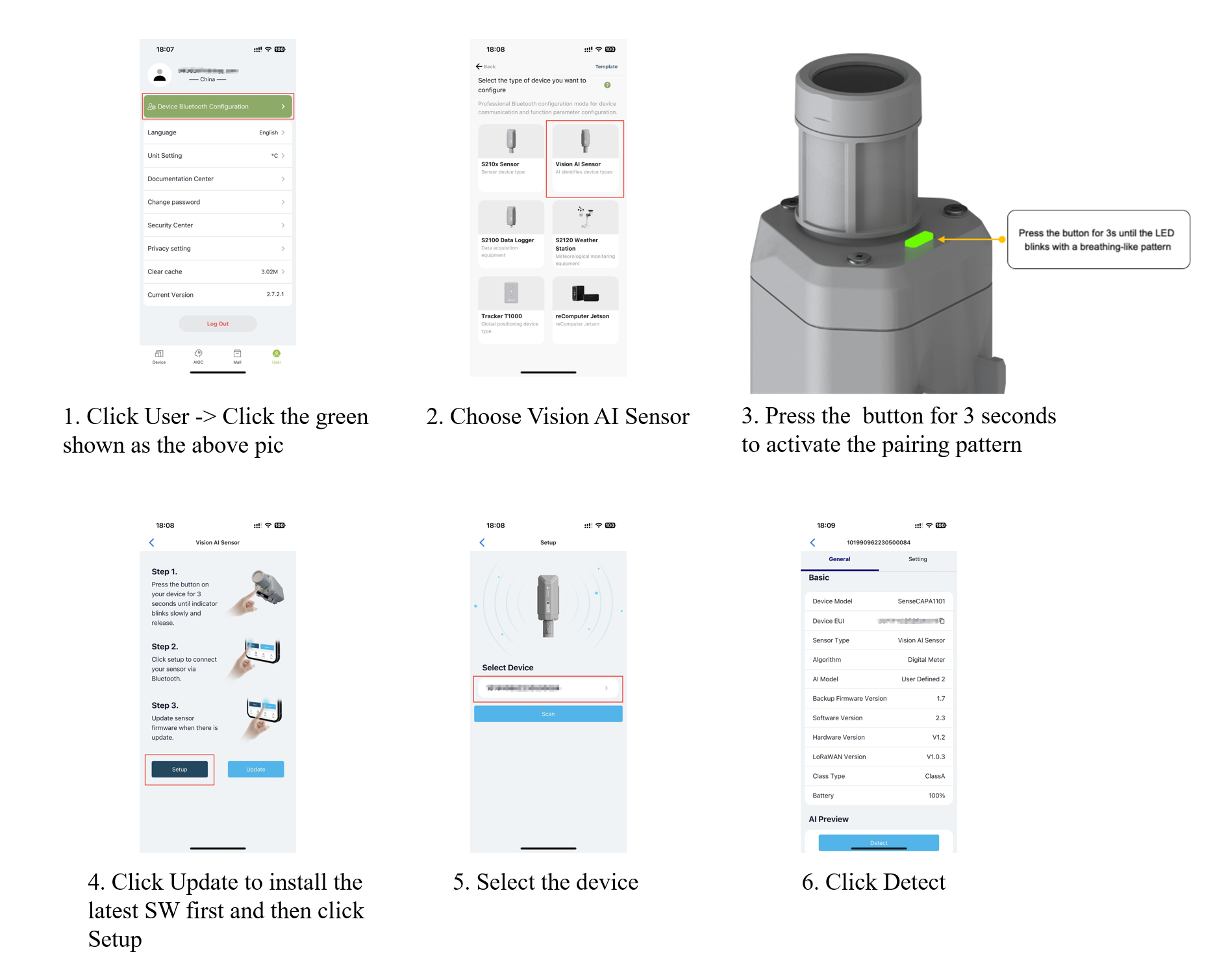
- 步骤 6. 如下所示,AI Preview 显示数字表识别结果。
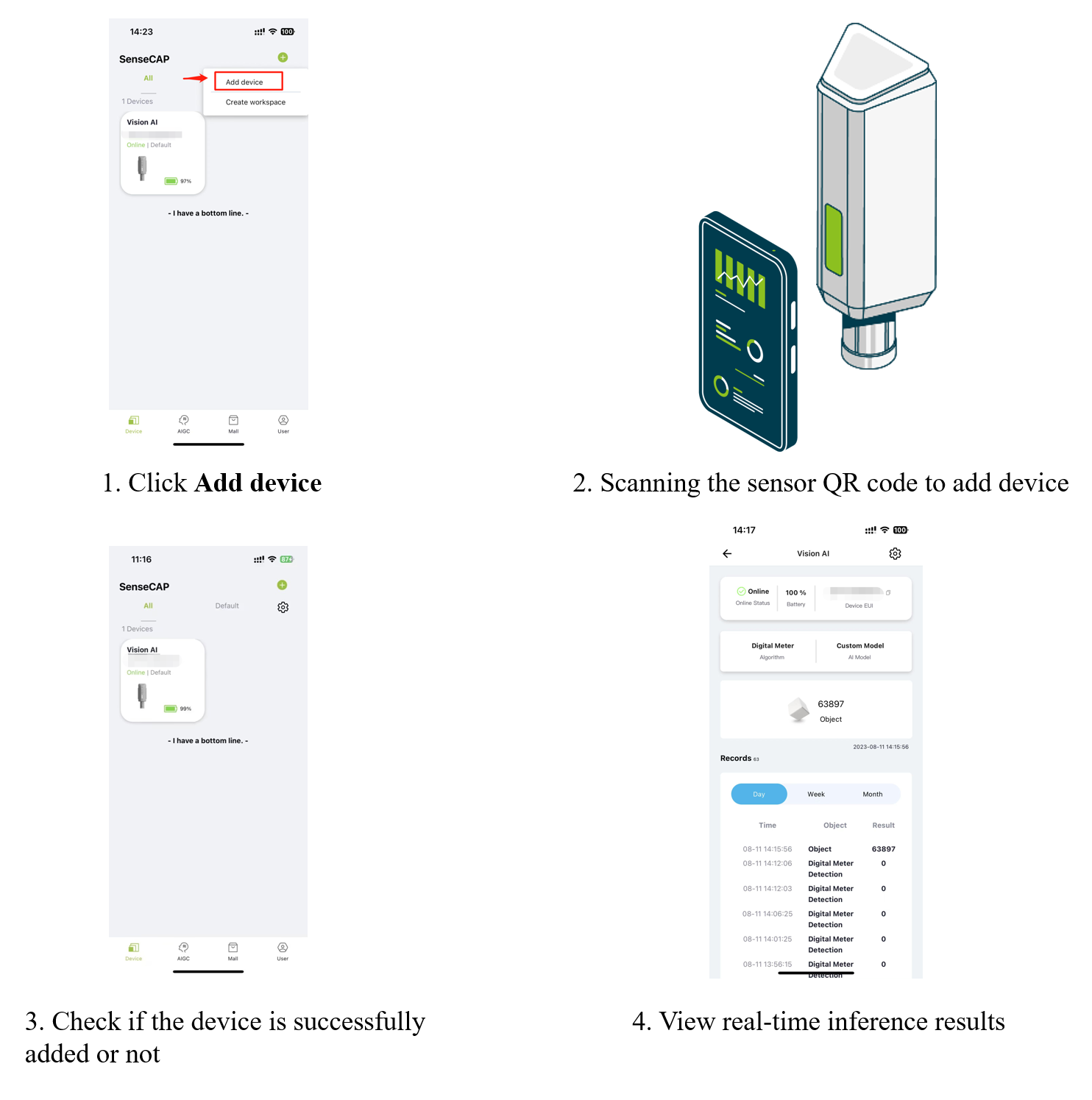
完成上述步骤后,我们将尝试将我们自己的 A1101 添加到设备中。通过以下 4 个步骤,我们可以通过像 SenseCAP Mate 这样的云平台随时随地查看设备识别的结果数据。
资源
-
[网页] Ultralytics HUB
-
[网页] Roboflow 文档
-
[网页] TensorFlow Lite 文档
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。