在 Seeed Studio XIAO nRF52840 Sense 上使用 TensorFlow Lite 入门指南

本教程将演示如何在 Seeed Studio XIAO nRF52840 Sense 上使用 TensorFlow Lite,并使用板载加速度计检测诸如出拳和弯曲等手势。这里的数据训练将在设备本身上完成。
对于嵌入式 AI 应用,我们强烈推荐使用"Seeed nrf52 mbed-enabled Boards Library"。
软件设置
请确保首先按照"Seeed Studio XIAO nRF52840 (Sense) 入门指南"教程进行初始硬件和软件设置。
现在让我们继续进行其余的软件设置。
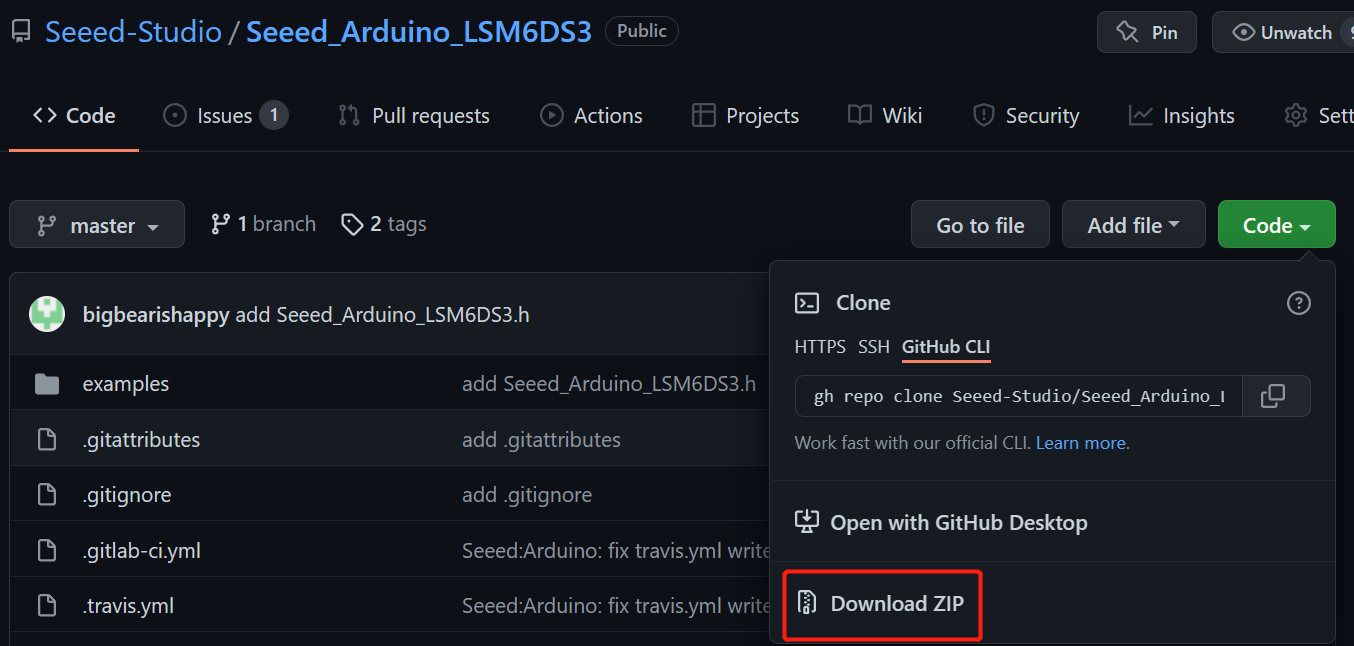
- 步骤 1. 下载 Seeed_Arduino_LSM6DS3 库 作为 zip 文件
- 步骤 2. 下载 tflite-micro-arduino-examples 库 作为 zip 文件

- 步骤 3. 打开 Arduino IDE,导航到
Sketch > Include Library > Add .ZIP Library...并依次打开下载的两个 zip 文件

- 步骤 4. 导航到
File > Examples > Seeed Arduino LSM6DS3 > IMU_Capture打开 IMU_Capture.ino

- 步骤 5. 上传代码并打开串口监视器
注意: 一旦上传代码,它不会自动执行,直到您点击 Arduino 窗口右上角的串口监视器。
训练数据
出拳动作
在串口监视器打开时,开始为出拳动作训练数据。
- 步骤 1. 用手掌握住 Seeed Studio XIAO nRF52840 Sense 并开始向前出拳,您将在串口监视器上看到一些数据打印出来


-
步骤 2. 重复出拳动作约 10 次,您将看到每次出拳后都会生成新数据
-
步骤 3. 复制并粘贴完整的串口监视器输出到文本文件中,并将文本文件保存为 punch.csv
注意: 请同时复制第一行,其中包含 aX,aY,aZ,gX,gY,gZ
弯曲动作
- 步骤 1. 重新连接 USB 线缆到 Seeed Studio XIAO nRF52840 Sense,打开串口监视器,用手掌握住 Seeed Studio XIAO nRF52840 Sense 并开始向内弯曲,您将在串口监视器上看到一些数据打印出来


-
步骤 2. 重复弯曲动作约 10 次,您将看到每次弯曲后都会生成新数据
-
步骤 3. 复制并粘贴完整的串口监视器输出到文本文件中,并将文本文件保存为 flex.csv
注意: 请同时复制第一行,其中包含 aX,aY,aZ,gX,gY,gZ
生成 TensorFlow Lite 模型文件
现在我们将使用之前创建的 punch.csv 和 flex.csv 文件来生成一个 TensorFlow Lite 模型文件 (model.h)。
- 步骤 1. 打开这个 Python 笔记本,它将帮助生成我们需要的 model.h 文件

- 步骤 2. 导航到左侧导航面板的文件选项卡,将 punch.csv 和 flex.csv 文件拖放到其中

- 步骤 3. 在 Setup Python Environment 部分中,将代码从 pip install tensorflow==2.0.0-rc1 更改为 pip install tensorflow

- 步骤 4. 导航到
Runtime > Run all来运行所有代码单元

- 步骤 5. 对于弹出的错误消息,点击 Run anyway

- 步骤 6. 一旦所有代码单元执行完毕,您将在之前看到的 files 选项卡下找到一个新生成的 model.h 文件

注意: 如果您看不到上述 model.h 文件,请刷新页面。
- 步骤 7. 右键点击该文件并点击 Download 将文件下载到您的电脑
推理
现在我们将使用下载的 TensorFlow Lite 模型文件 (model.h) 来识别来自 Seeed Studio XIAO nRF52840 Sense 的出拳和弯曲动作。
- 步骤 1. 导航到 Seeed_Arduino_LSM6DS3 库的库路径(通常在 Documents > Arduino > libraries > Seeed_Arduino_LSM6DS3 下),并访问 examples > IMU_Classifier

-
步骤 2. 用我们之前下载的文件替换 model.h 文件
-
步骤 3. 双击 IMU_Classifier.ino 并将代码上传到 Seeed Studio XIAO nRF52840 Sense。
出拳动作
打开串口监视器并执行出拳动作。您将看到它会在 punch 旁边给出接近 1 的结果

弯曲动作
执行弯曲动作。您将看到它会在 flex 旁边给出接近 1 的结果

资源
- [网页] TensorFlow Lite 文档
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。