XIAO nRF52840(sense) 与 Zephyr(RTOS)

什么是 RTOS
当今嵌入式系统最重要的组件之一是 RTOS,也称为实时操作系统,它负责从任务调度到执行应用程序的所有工作。
RTOS 旨在提供可预测的执行模式。当处理必须满足系统的时间限制时,就会使用 RTOS。因此,与 GPOS(通用操作系统)相比,RTOS 通常重量轻、体积小,通常只提供在特定硬件上运行特定类型应用程序所需的功能。在某些情况下,开发人员可以修改现有的 RTOS,将其缩减为仅提供特定应用程序所需的功能,和/或定制其功能或性能特征。
什么是 Zephyr
Zephyr 操作系统基于一个小占用空间的内核,专为在资源受限和嵌入式系统上使用而设计:从简单的嵌入式环境传感器和 LED 可穿戴设备到复杂的嵌入式控制器、智能手表和 IoT 无线应用程序。
特性
Zephyr 提供大量且不断增长的功能,包括:
广泛的内核服务套件
Zephyr 为开发提供了许多熟悉的服务:
- 多线程服务,支持协作式、基于优先级的、非抢占式和抢占式线程,可选循环时间片。包括 POSIX pthreads 兼容 API 支持。
- 中断服务,用于中断处理程序的编译时注册。
- 内存分配服务,用于固定大小或可变大小内存块的动态分配和释放。
- 线程间同步服务,包括二进制信号量、计数信号量和互斥信号量。
- 线程间数据传递服务,包括基本消息队列、增强消息队列和字节流。
- 电源管理服务,如总体的、应用程序或策略定义的系统电源管理和细粒度的、驱动程序定义的设备电源管理。
多种调度算法
Zephyr 提供了一套全面的线程调度选择:
- 协作式和抢占式调度
- 最早截止时间优先 (EDF)
- Meta IRQ 调度,实现"中断下半部"或"tasklet"行为
- 时间片:在相同优先级的可抢占线程之间启用时间片
- 多种队列策略:
- 简单链表就绪队列
- 红黑树就绪队列
- 传统多队列就绪队列
蓝牙低功耗 5.0 支持
蓝牙 5.0 兼容 (ESR10) 和蓝牙低功耗控制器支持 (LE 链路层)。包括蓝牙网格和蓝牙认证就绪的蓝牙控制器。
- 通用访问配置文件 (GAP),支持所有可能的 LE 角色
- 通用属性配置文件 (GATT)
- 配对支持,包括蓝牙 4.2 的安全连接功能
- 清晰的 HCI 驱动程序抽象
- 原始 HCI 接口,可将 Zephyr 作为控制器而不是完整的主机堆栈运行
- 已通过多个流行控制器验证
- 高度可配置
网格支持:
- 中继、朋友节点、低功耗节点 (LPN) 和 GATT 代理功能
- 支持两种配置承载 (PB-ADV 和 PB-GATT)
- 高度可配置,适用于至少具有 16k RAM 的设备
参考:Zephyr 项目
入门指南
一旦设置好 Zephyr 工具链并下载了相关的 SDK,您就可以开始应用程序开发了。
对于 Xiao nrf52840,可以参考板卡描述文件获取更多设置信息。
要对 Xiao nrf52840 进行编程,可以按照以下步骤操作:
- 构建一个示例或您的应用程序
- 插入 Xiao nrf52840
- 双击
RST按钮,将设备设置为 uf2 引导加载程序模式 - 运行命令
west flash -r uf2来刷写设备
最简单的示例是在板卡上运行"Hello World"示例。切换到 Zephyr 安装目录后,运行以下命令。
west build -p always -b xiao_ble samples/hello_world
如果您使用的是 Xiao nRF52840 Sense 开发板,您可以通过使用 xiao_ble/nrf52840/sense 来替代 xiao_ble 为其板定义文件进行构建,如下所示(在此示例中没有区别):
west build -p always -b xiao_ble/nrf52840/sense samples/hello_world
完成此操作后进入 uf2 引导加载程序模式并输入:
west flash -r uf2
找到您设备的端口,在 Ubuntu 的情况下可以通过以下命令完成:ls /dev/tty* 并确认插入 USB 后出现的设备。
在我的示例中,我看到 /dev/ttyACM0:
使用 screen 您可以连接并监控串行响应:
screen /dev/ttyACM0 115200
你应该看到类似以下的响应:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
Hello World! xiao_ble/nrf52840
为了协助在 Xiao 及其扩展板上使用 Zephyr 的过程,我们构建了一个仓库,其中包含了此处使用的多个覆盖层和配置。本 wiki 文章中包含的命令假设该仓库位于相对于 zephyr 根目录的 ../applications/xiao-zephyr-examples 路径。可以通过更新下面的命令来提供替代路径。
git clone https://github.com/Cosmic-Bee/xiao-zephyr-examples
硬件准备
| Seeed Studio XIAO nrf52840 Sense | Seeed Studio 扩展板 |
|---|---|
 |  |
开发者知识
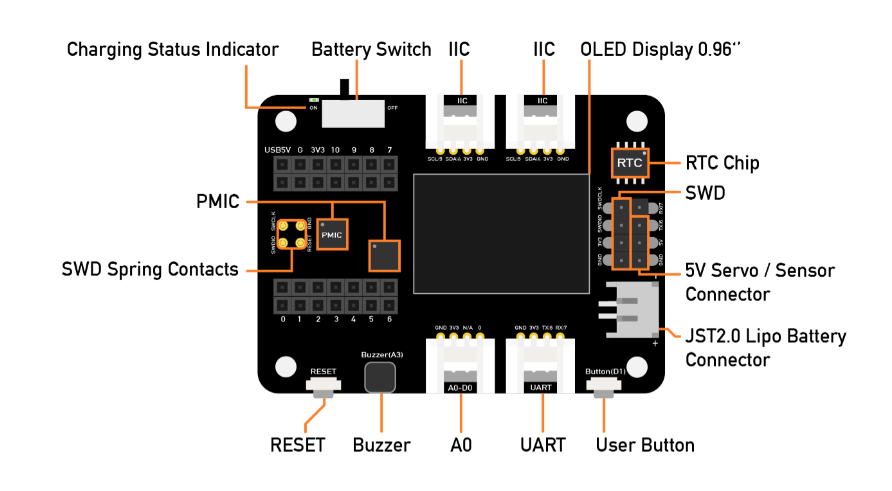
XIAO 扩展板
为了在 Seeed Studio XIAO nrf52840 上使用 Grove 模块,我们将使用 Seeed Studio XIAO 扩展底板 并将 XIAO nrf52840 连接到上面。
之后,板上的 Grove 连接器就可以用来连接 Grove 模块了
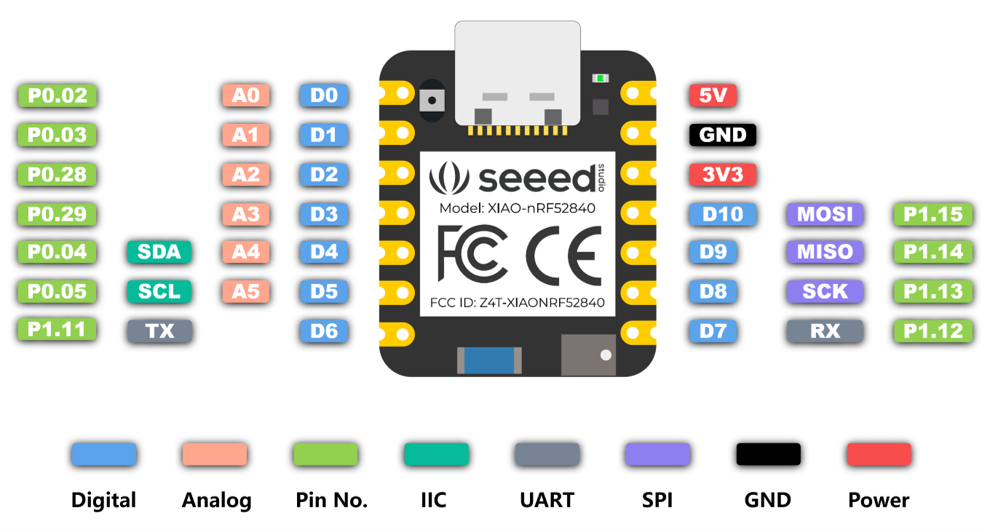
引脚定义
当将 Grove 模块连接到 Seeed Studio XIAO 的 Grove 扩展板上的 Grove 连接器时,您需要按照下图使用相应的内部引脚编号。
主要功能
- 板载 LED
- 板载 IMU(Sense)
- 板载麦克风(Sense)
- 蓝牙
- TFLite
板载 LED
在这个示例中,我们将使用闪烁示例来让板载 LED 闪烁。
cd ~/zephyrproject/zephyr
west build -p always -b xiao_ble samples/basic/blinky
双击RESET按钮,然后闪烁:
west flash -r uf2
您将看到板载红色 LED 开关切换,产生闪烁效果。
让我们深入了解这个示例,看看它为什么有效。
相关的示例代码引用了 led0:
#define LED0_NODE DT_ALIAS(led0)
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(LED0_NODE, gpios);
这在 Xiao nRF52840 设备树代码中通过别名定义:
aliases {
led0 = &led0;
};
leds {
compatible = "gpio-leds";
led0: led_0 {
gpios = <&gpio0 26 GPIO_ACTIVE_LOW>;
label = "Red LED";
};
...
}
它对应板子上的第26号引脚。
对于带有Xiao分线板的引脚,你不需要直接使用&gpio0引脚映射,因为板文件提供了一个Xiao连接器来简化接口。
例如,如果我要引用D0,我可以将其引用为&gpio 2或&xiao_d 0。
/ {
xiao_d: connector {
compatible = "seeed,xiao-gpio";
#gpio-cells = <2>;
gpio-map-mask = <0xffffffff 0xffffffc0>;
gpio-map-pass-thru = <0 0x3f>;
gpio-map
= <0 0 &gpio0 2 0> /* D0 */
, <1 0 &gpio0 3 0> /* D1 */
, <2 0 &gpio0 28 0> /* D2 */
, <3 0 &gpio0 29 0> /* D3 */
, <4 0 &gpio0 4 0> /* D4 */
, <5 0 &gpio0 5 0> /* D5 */
, <6 0 &gpio1 11 0> /* D6 */
, <7 0 &gpio1 12 0> /* D7 */
, <8 0 &gpio1 13 0> /* D8 */
, <9 0 &gpio1 14 0> /* D9 */
, <10 0 &gpio1 15 0> /* D10 */
;
};
};
板载 IMU(传感)
Xiao nrf52840 的主要特性之一是其内置的 IMU 传感器。利用这些数据,可以训练机器学习模型、检测手势、检测板子的运动等。
为了测试这个功能,我们将使用一个内置示例,该示例利用了 IMU,然后查看相关代码以了解其工作原理。
cd ~/zephyrproject/zephyr
west build -p -b xiao_ble/nrf52840/sense samples/sensor/lsm6dsl
双击 RESET 按钮,然后闪烁:
west flash -r uf2
接下来你需要连接以查看输出:
screen /dev/ttyACM0 115200
这应该显示类似以下内容:
3LSM6DSL sensor samples:
accel x:1.330409 ms/2 y:-1.705484 ms/2 z:9.957133 ms/2
gyro x:0.049632 dps y:-0.070860 dps z:-0.006184 dps
loop:46 trig_cnt:9677
3LSM6DSL sensor samples:
accel x:1.314257 ms/2 y:-1.734198 ms/2 z:9.902696 ms/2
gyro x:-0.220216 dps y:0.032833 dps z:-0.000458 dps
loop:47 trig_cnt:9892
3LSM6DSL sensor samples:
accel x:1.414158 ms/2 y:-1.476371 ms/2 z:9.835697 ms/2
gyro x:0.035430 dps y:-0.132252 dps z:-0.007788 dps
loop:48 trig_cnt:10107
为什么它能工作?我们可以通过 Zephyr 的 github 仓库查看示例代码。
const struct device *const lsm6dsl_dev = DEVICE_DT_GET_ONE(st_lsm6dsl);
示例逻辑为目标板找到关联的 st_lsm6dsl 设备树对象。我们可以查看 Xiao nrf52840 sense 设备树来进一步了解其配置方式:
lsm6ds3tr-c-en {
compatible = "regulator-fixed-sync", "regulator-fixed";
enable-gpios = <&gpio1 8 (NRF_GPIO_DRIVE_S0H1 | GPIO_ACTIVE_HIGH)>;
regulator-name = "LSM6DS3TR_C_EN";
regulator-boot-on;
startup-delay-us = <3000>;
};
&i2c0 {
compatible = "nordic,nrf-twim";
/* Cannot be used together with spi0. */
status = "okay";
pinctrl-0 = <&i2c0_default>;
pinctrl-1 = <&i2c0_sleep>;
pinctrl-names = "default", "sleep";
clock-frequency = <I2C_BITRATE_FAST>;
lsm6ds3tr_c: lsm6ds3tr-c@6a {
compatible = "st,lsm6dsl";
reg = <0x6a>;
irq-gpios = <&gpio0 11 GPIO_ACTIVE_HIGH>;
status = "okay";
};
};
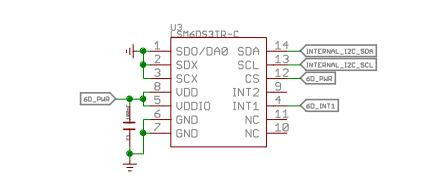
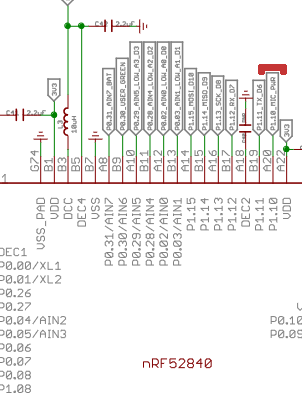
一个 GPIO 被用来启用引脚电源。您可以从定义文件中看到它使用的是 GPIO1 8。我在下面突出显示了 Xiao nRF52840 原理图 的相关部分:
从这个原理图高亮部分您可以看到 GPIO1 8 是 IMU 的使能引脚。此外,GPIO0 11 是中断引脚。因此这在上述设备树片段中得到了体现。
板载麦克风 (Sense)
Xiao nrf52840 的主要特性之一是其内置麦克风。像其 IMU 一样,它通过使用允许许多机器学习应用。
为了测试这个功能,我们将使用一个内置示例,该示例利用麦克风,然后研究相关代码以了解它为什么工作。
cd ~/zephyrproject/zephyr
west build -p -b xiao_ble/nrf52840/sense samples/drivers/audio/dmic
双击 RESET 按钮,然后闪烁:
west flash -r uf2
接下来你需要连接以查看输出:
screen /dev/ttyACM0 115200
这应该显示类似以下内容:
[00:00:00.297,088] <inf> dmic_sample: PCM output rate: 16000, channels: 1
[00:00:00.297,119] <inf> dmic_nrfx_pdm: PDM clock frequency: 1280000, actual PCM rate: 16000
[00:00:00.397,216] <inf> dmic_sample: 0 - got buffer 0x20008380 of 3200 bytes
[00:00:00.497,222] <inf> dmic_sample: 1 - got buffer 0x20006a80 of 3200 bytes
[00:00:00.597,229] <inf> dmic_sample: 2 - got buffer 0x20005180 of 3200 bytes
[00:00:00.697,235] <inf> dmic_sample: 3 - got buffer 0x20008380 of 3200 bytes
[00:00:00.797,241] <inf> dmic_sample: 4 - got buffer 0x20006a80 of 3200 bytes
[00:00:00.897,247] <inf> dmic_sample: 5 - got buffer 0x20005180 of 3200 bytes
[00:00:00.997,222] <inf> dmic_sample: 6 - got buffer 0x20008380 of 3200 bytes
[00:00:01.097,229] <inf> dmic_sample: 7 - got buffer 0x20006a80 of 3200 bytes
[00:00:01.097,259] <inf> dmic_sample: PCM output rate: 16000, channels: 2
[00:00:01.097,259] <inf> dmic_nrfx_pdm: PDM clock frequency: 1280000, actual PCM rate: 16000
[00:00:01.197,387] <inf> dmic_sample: 0 - got buffer 0x20008380 of 6400 bytes
[00:00:01.297,393] <inf> dmic_sample: 1 - got buffer 0x20005180 of 6400 bytes
[00:00:01.397,399] <inf> dmic_sample: 2 - got buffer 0x20006a80 of 6400 bytes
[00:00:01.497,375] <inf> dmic_sample: 3 - got buffer 0x20008380 of 6400 bytes
[00:00:01.597,381] <inf> dmic_sample: 4 - got buffer 0x20005180 of 6400 bytes
[00:00:01.697,387] <inf> dmic_sample: 5 - got buffer 0x20006a80 of 6400 bytes
[00:00:01.797,393] <inf> dmic_sample: 6 - got buffer 0x20008380 of 6400 bytes
[00:00:01.897,399] <inf> dmic_sample: 7 - got buffer 0x20005180 of 6400 bytes
[00:00:01.897,399] <inf> dmic_sample: Exiting
为什么它能工作?我们可以通过 github 仓库查看 Zephyr 的示例代码。
这个示例演示了以下内容:
这是一个非常简单的应用程序,旨在展示如何使用 :ref:
Audio DMIC API,同时也是开发实现此 API 的驱动程序的辅助工具。它使用不同的配置(使用一个通道和两个通道)执行两次 PDM 传输,但不会以任何方式处理接收到的音频数据。
const struct device *const dmic_dev = DEVICE_DT_GET(DT_NODELABEL(dmic_dev));
示例逻辑为目标板找到关联的 dmic_dev 设备树对象。我们可以查看 Xiao nrf52840 sense 设备树来进一步了解其配置方式:
/ {
msm261d3526hicpm-c-en {
compatible = "regulator-fixed";
enable-gpios = <&gpio1 10 (NRF_GPIO_DRIVE_S0H1 | GPIO_ACTIVE_HIGH)>;
regulator-name = "MSM261D3526HICPM-C-EN";
};
}
&pdm0 {
pinctrl-0 = <&pdm0_default>;
pinctrl-1 = <&pdm0_sleep>;
pinctrl-names = "default", "sleep";
clock-source = "PCLK32M";
};
在示例项目叠加层中,此调节器随后被启用:
/ {
msm261d3526hicpm-c-en {
regulator-boot-on;
};
};
dmic_dev: &pdm0 {
status = "okay";
};
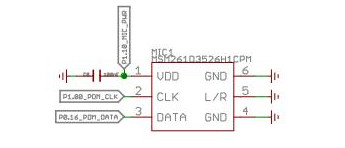
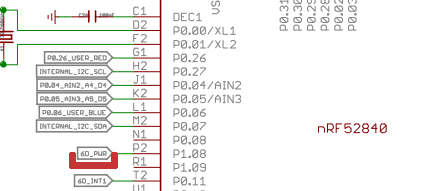
一个 GPIO 被用来启用引脚电源。我在下面突出显示了 Xiao nRF52840 原理图 的相关部分:
从这个原理图高亮部分可以看到 GPIO1 10 是麦克风的使能引脚。
蓝牙
为了测试这个设置,我们可以使用 Zephyr 的现有示例:
west build -p always -b xiao_ble samples/bluetooth/observer
Flash your board:
west flash -r uf2
闪烁后等待片刻让 MCU 重置并连接到显示器:
screen /dev/ttyACM0 115200
你会看到一个可用于向开发板发送命令的控制台:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
Starting Observer Demo
Started scanning...
Exiting main thread.
Device found: EC:11:27:22:AF:D2 (public) (RSSI -74), type 0, AD data len 31
Device found: 0D:9A:BE:8D:10:FC (random) (RSSI -81), type 3, AD data len 31
Device found: D2:70:D8:F2:6F:C4 (random) (RSSI -68), type 0, AD data len 20
Device found: 72:7C:3C:87:E2:17 (random) (RSSI -77), type 0, AD data len 17
Device found: 65:65:23:B9:AD:EC (random) (RSSI -68), type 0, AD data len 17
Device found: 6D:39:26:C2:94:B5 (random) (RSSI -70), type 0, AD data len 18
CONFIG_BT=y
CONFIG_BT_OBSERVER=y
这里的配置文件为Zephyr构建启用了蓝牙相关功能。
TFLite - Hello World
启用TFLite与Zephyr并更新:
west config manifest.project-filter -- +tflite-micro
west update
构建示例并烧录到您的开发板:
west build -p always -b xiao_ble samples/modules/tflite-micro/hello_world
Flash your board:
west flash -r uf2
闪烁后等待片刻让 MCU 重置并连接到显示器:
screen /dev/ttyACM0 115200
你将看到从控制台返回的结果:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
x_value: 1.0*2^-127, y_value: 1.0*2^-127
x_value: 1.2566366*2^-2, y_value: 1.4910772*2^-2
x_value: 1.2566366*2^-1, y_value: 1.1183078*2^-1
x_value: 1.8849551*2^-1, y_value: 1.677462*2^-1
x_value: 1.2566366*2^0, y_value: 1.9316229*2^-1
x_value: 1.5707957*2^0, y_value: 1.0420598*2^0
x_value: 1.8849551*2^0, y_value: 1.9146791*2^-1
x_value: 1.0995567*2^1, y_value: 1.6435742*2^-1
x_value: 1.2566366*2^1, y_value: 1.0674761*2^-1
x_value: 1.4137159*2^1, y_value: 1.8977352*2^-3
关于 TFLite 的其他信息超出了本指南的范围,但该示例可以作为设备功能和运行 TFLite 设置所需组件的指南。
其他组件
- Grove - 扩展板 - I2C 显示屏
- Grove - 扩展板 - 按钮
- Grove - 扩展板 - 蜂鸣器
- Grove - 扩展板 - SD 卡
- Grove - 温湿度传感器 (SHT31)
- 1.69英寸 LCD 显示模块,240×280 分辨率,SPI 接口
- Xiao 圆形显示屏
- Xiao 圆形显示屏 - SD 卡
Grove - 扩展板 - I2C 显示屏
要测试此设置,我们可以使用 Zephyr 的现有示例:
west build -p always -b xiao_ble samples/drivers/display -- -DSHIELD=seeed_xiao_expansion_board
west flash -r uf2
您将看到一个显示多个黑色方块和角落中一个闪烁方块的显示屏,因为这个显示屏只支持两种颜色。
让我们深入了解这个例子,看看它为什么有效:
/ {
chosen {
zephyr,display = &ssd1306;
};
};
&xiao_i2c {
status = "okay";
ssd1306: ssd1306@3c {
compatible = "solomon,ssd1306fb";
reg = <0x3c>;
width = <128>;
height = <64>;
segment-offset = <0>;
page-offset = <0>;
display-offset = <0>;
multiplex-ratio = <63>;
segment-remap;
com-invdir;
prechargep = <0x22>;
};
};
该扩展板在 0x3C 寄存器处设置了一个 SSD1306 OLED 屏幕。它在 chosen 部分中被选择为 zephyr 显示器。
Grove - 扩展板 - 按钮
为了测试这个设置,我们可以使用 Zephyr 的现有示例:
west build -p always -b xiao_ble samples/basic/button -- -DSHIELD=seeed_xiao_expansion_board
烧录您的开发板:
west flash -r uf2
闪烁后等待片刻让 MCU 重置并连接到显示器:
screen /dev/ttyACM0 115200
按下带有示例的按钮将触发板载LED点亮。
您将看到从控制台返回的结果:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
Set up button at gpio@50000000 pin 3
Set up LED at gpio@50000000 pin 26
Press the button
Button pressed at 839637
Button pressed at 857904
Button pressed at 883367
Button pressed at 1001258
让我们深入探讨这个例子,看看为什么它能够起作用:
/ {
aliases {
sw0 = &xiao_button0;
};
buttons {
compatible = "gpio-keys";
xiao_button0: button_0 {
gpios = <&xiao_d 1 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
label = "SW0";
zephyr,code = <INPUT_KEY_0>;
};
};
};
屏蔽/覆盖文件用于设置各种板载组件。使用此文件,按钮示例可以被利用,因为覆盖允许 Zephyr 配置按钮并使其可用于相关代码。
在这种情况下,Xiao nrf52840 上的 D1。它在此覆盖中被设置为充当按钮,并被别名为 sw0 名称,以允许它用于具有期望此功能的代码的示例。
Grove - 扩展板 - 蜂鸣器
我们将使用闪烁 PWM 示例来激活我们的蜂鸣器,通过 PWM 信号控制其激活。为此,我们将使用一个自定义覆盖,该覆盖为 A3 引脚启用 PWM。
cd ~/zephyrproject/zephyr
west build -p always -b xiao_ble samples/basic/blinky_pwm -- -DDTC_OVERLAY_FILE="$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-nrf52480/xiao_expansion_buzzer.overlay"
刷写完成后,您应该开始听到一系列蜂鸣声,这些声音会随着示例程序的运行而发生变化。
让我们来看看这是如何工作的:
&pwm0 {
status = "disabled";
};
&sw_pwm {
status = "okay";
channel-gpios = <&gpio0 29 PWM_POLARITY_INVERTED>;
};
&pwm_led0 {
pwms = <&sw_pwm 0 PWM_MSEC(20) PWM_POLARITY_INVERTED>;
};
覆盖层为引脚 29 配置 PWM 逻辑,该引脚对应 Xiao nrf52840 引脚图中的 A3 引脚。
Grove - 扩展板 - SD 卡
我们将在这里使用文件系统示例以及 Xiao 扩展板护盾来尝试通过 SPI 与 SD 卡读卡器进行接口连接。扩展板护盾的 CS 引脚配置为关联的 &xiao_d 2 引脚,因此除了添加护盾之外,您无需为将此功能与板卡关联而做任何工作。为了进一步准备,我们使用了启用 SD 卡功能的自定义配置。
cd ~/zephyrproject/zephyr
west build -p always -b xiao_ble samples/subsys/fs/fs_sample -- -DEXTRA_CONF_FILE="$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao_expansion_sd.conf" -DSHIELD=seeed_xiao_expansion_board
现在刷写并监控(首先按两次 RESET 进入 uf2 引导加载程序模式):
west flash -r uf2
你应该看到类似这样的响应:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
[00:00:00.483,367] <inf> sd: Maximum SD clock is under 25MHz, using clock of 24000000Hz
[00:00:00.483,856] <inf> main: Block count 15519744
Sector size 512
Memory Size(MB) 7578
Disk mounted.
Listing dir /SD: ...
[FILE] IMAGE1.JPG (size = 58422)
[FILE] IMAGE2.JPG (size = 97963)
在这种情况下,我的 SD 卡有两个文件。它们的名称和大小被输出到我的控制台。
让我们来看看这里涉及的相关元素:
CONFIG_SPI=y
CONFIG_DISK_DRIVER_SDMMC=y
CONFIG_GPIO=y
在相关配置中,我们启用了 SPI、SDMMC 磁盘驱动程序和 GPIO。如果没有这个配置,覆盖层将导致错误,因为示例无法找到 SD 卡。
Xiao 扩展板屏蔽层的相关部分如下所示:
&xiao_spi {
status = "okay";
cs-gpios = <&xiao_d 2 GPIO_ACTIVE_LOW>;
sdhc0: sdhc@0 {
compatible = "zephyr,sdhc-spi-slot";
reg = <0>;
status = "okay";
mmc {
compatible = "zephyr,sdmmc-disk";
status = "okay";
};
spi-max-frequency = <24000000>;
};
};
如前所述,使用 &xiao_d 2 引脚映射是为了允许选择 D2 引脚,无论使用哪种板子,只要它支持 &xiao_d 引脚设置即可。
Grove - 温湿度传感器 (SHT31)
首先焊接引脚并将您的 Xiao nrf52840 连接到扩展板。然后使用 grove 连接线将 Grove SHT31 连接到扩展板上的其中一个 I2C 端口。
要测试此设置,我们可以使用 Zephyr 的现有示例:
west build -p always -b xiao_ble samples/sensor/sht3xd -- -DDTC_OVERLAY_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/sht31.overlay
在您的板子进入 uf2 引导加载程序模式后对其进行刷写:
west flash -r uf2
闪烁后等待片刻让 MCU 重置并连接到显示器:
screen /dev/ttyACM0 115200
你将看到从控制台返回的结果:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
SHT3XD: 25.68 Cel ; 54.73 %RH
SHT3XD: 25.75 Cel ; 55.44 %RH
SHT3XD: 25.79 Cel ; 55.95 %RH
SHT3XD: 25.82 Cel ; 55.93 %RH
SHT3XD: 25.84 Cel ; 56.07 %RH
SHT3XD: 25.84 Cel ; 55.69 %RH
让我们深入探讨这个例子,看看为什么它能够起作用:
&xiao_i2c {
sht3xd@44 {
compatible = "sensirion,sht3xd";
reg = <0x44>;
};
};
应用覆盖文件用于设置各种板载组件。使用此文件,SHT31 示例可以被利用,因为覆盖文件会告知示例逻辑如何为我们的板子配置传感器。
1.69英寸LCD显示模块,240×280分辨率,SPI接口
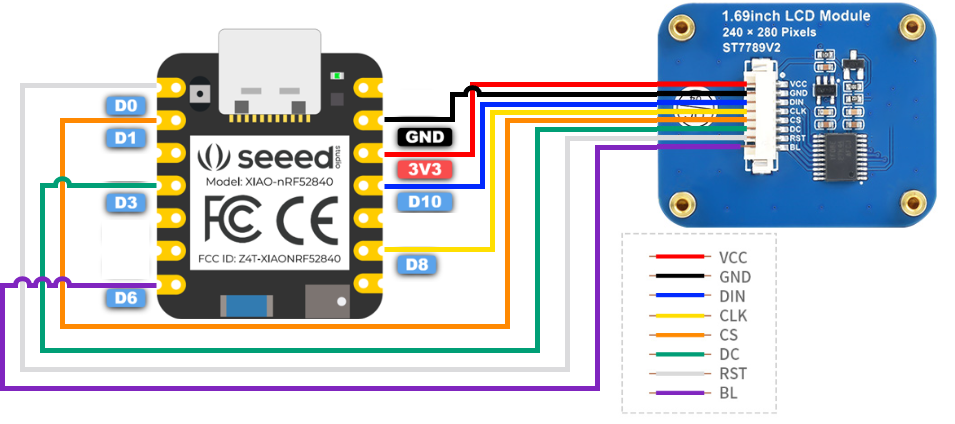
在这个示例中,我们将使用SPI连接到一个1.69英寸、240x280分辨率的LCD。
首先使用以下图片作为指导将您的板子连接到LCD屏幕(在这种情况下我们使用的是Xiao nrf52840,但这里使用相同的引脚布局进行连接)。
| 1.69英寸LCD SPI显示屏 | XIAO nrf52840 |
|---|---|
| VCC | 3V3 |
| GND | GND |
| DIN | D10 |
| CLK | D8 |
| CS | D1 |
| DC | D3 |
| RST | D0 |
| BL | D6 |
现在我们可以构建并烧录固件:
cd ~/zephyrproject/zephyr
west build -p always -b xiao_ble samples/drivers/display -- -DDTC_OVERLAY_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/240x280_st7789v2.overlay -DEXTRA_CONF_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/240x280_st7789v2.conf
west flash -r uf2
随着新固件的安装,设备现在显示与我们之前在扩展板上看到的相同演示屏幕,只是现在更新为通过 SPI 的彩色 LCD。
Xiao 圆形显示屏
要测试此设置,我们可以使用 Zephyr 的现有示例:
west build -p always -b xiao_ble samples/drivers/display -- -DSHIELD=seeed_xiao_round_display
进入引导加载程序模式并刷写您的设备:
west flash -r uf2
您将看到一个显示多个彩色角落的显示屏,其中一个黑色角落在闪烁。
另一个示例演示了触摸屏的使用:
west build -p always -b xiao_ble samples/modules/lvgl/demos -- -DSHIELD=seeed_xiao_round_display -DCONFIG_LV_Z_DEMO_MUSIC=y
这里展示的音乐演示只是实际屏幕的一部分,但仍然演示了触摸屏的操作。如您所见,触摸播放按钮会开启音乐动画。
您可以从shield文件中看到,这是通过SPI接口与GC9A01圆形显示驱动程序以及通过i2c与CHSC6X触摸模块进行交互来实现的。
让我们深入了解一下这个示例,看看它是如何工作的:
/ {
chosen {
zephyr,display = &gc9a01_xiao_round_display;
};
lvgl_pointer {
compatible = "zephyr,lvgl-pointer-input";
input = <&chsc6x_xiao_round_display>;
};
};
/*
* xiao_serial uses pins D6 and D7 of the Xiao, which are used respectively to
* control the screen backlight and as touch controller interrupt.
*/
&xiao_serial {
status = "disabled";
};
&xiao_i2c {
clock-frequency = < I2C_BITRATE_FAST >;
chsc6x_xiao_round_display: chsc6x@2e {
status = "okay";
compatible = "chipsemi,chsc6x";
reg = <0x2e>;
irq-gpios = <&xiao_d 7 GPIO_ACTIVE_LOW>;
};
};
&xiao_spi {
status = "okay";
cs-gpios = <&xiao_d 1 GPIO_ACTIVE_LOW>, <&xiao_d 2 GPIO_ACTIVE_LOW>;
gc9a01_xiao_round_display: gc9a01@0 {
status = "okay";
compatible = "galaxycore,gc9x01x";
reg = <0>;
spi-max-frequency = <DT_FREQ_M(100)>;
cmd-data-gpios = <&xiao_d 3 GPIO_ACTIVE_HIGH>;
pixel-format = <PANEL_PIXEL_FORMAT_RGB_565>;
width = <240>;
height = <240>;
display-inversion;
};
};
这个扩展板的功能如下:
- 选择 GC9A01 显示屏作为所选的 Zephyr 显示器
- 设置 LVGL 指针逻辑使用 CHSC6X 模块
- 禁用串口,因为引脚用于背光和触摸中断(如上所示通过:
irq-gpios = <&xiao_d 7 GPIO_ACTIVE_LOW>;) - 配置圆形显示屏使用 D1、D2 和 D3 引脚进行 SPI 通信
示例逻辑 依赖于 LVGL 演示示例代码,可以进一步研究。
Xiao 圆形显示屏 - SD 卡
我们将在这里使用文件系统示例以及 Xiao 扩展板扩展板来尝试通过 SPI 与 SD 卡读卡器进行接口通信。扩展板扩展板已为相关的 &xiao_d 2 引脚配置了 CS 引脚,因此除了添加扩展板之外,您无需为将此功能与开发板关联做任何工作。为了进一步准备,我们使用了启用 SD 卡功能的自定义配置。
cd ~/zephyrproject/zephyr
west build -p always -b xiao_ble samples/subsys/fs/fs_sample -- -DEXTRA_CONF_FILE="$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao_expansion_sd.conf" -DSHIELD=seeed_xiao_round_display
现在刷写并监控(首先按两次 RESET 进入 uf2 引导加载程序模式):
west flash -r uf2
闪烁后等待片刻让 MCU 重置并连接到显示器:
screen /dev/ttyACM0 115200
您应该看到类似这样的响应:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
[00:00:00.491,485] <inf> sd: Maximum SD clock is under 25MHz, using clock of 24000000Hz
[00:00:00.491,973] <inf> main: Block count 15519744
Sector size 512
Memory Size(MB) 7578
Disk mounted.
Listing dir /SD: ...
[FILE] IMAGE1.JPG (size = 58422)
[FILE] IMAGE2.JPG (size = 97963)
如预期的那样,文件内容的显示方式与 Xiao 扩展板 SD 卡示例的输出类似。
圆形显示屏扩展板的相关部分如下所示:
&xiao_spi {
status = "okay";
cs-gpios = <&xiao_d 1 GPIO_ACTIVE_LOW>, <&xiao_d 2 GPIO_ACTIVE_LOW>;
sdhc_xiao_round_display: sdhc@1 {
compatible = "zephyr,sdhc-spi-slot";
reg = <1>;
status = "okay";
mmc {
compatible = "zephyr,sdmmc-disk";
status = "okay";
};
spi-max-frequency = <DT_FREQ_M(24)>;
};
};
D2 用于 SD CS 引脚。
✨ 贡献者项目
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。