AC1 入门指南

介绍
Active Camera 由 RoboSense 发明,是机器人视觉领域的一个突破性类别,旨在解决移动感知和操作认知的挑战。
AC1 是该系列的第一款产品,集成了多个传感器,可在硬件级别融合深度信息、图像数据和运动姿态数据,实现时间和空间同步。这使机器人能够捕获全面的环境细节,克服阳光和高反射表面的干扰,适应各种室内外场景。
在本 wiki 中,我们将演示将 AC1 与 reComputer Robotics 结合使用的详细过程。
前提条件

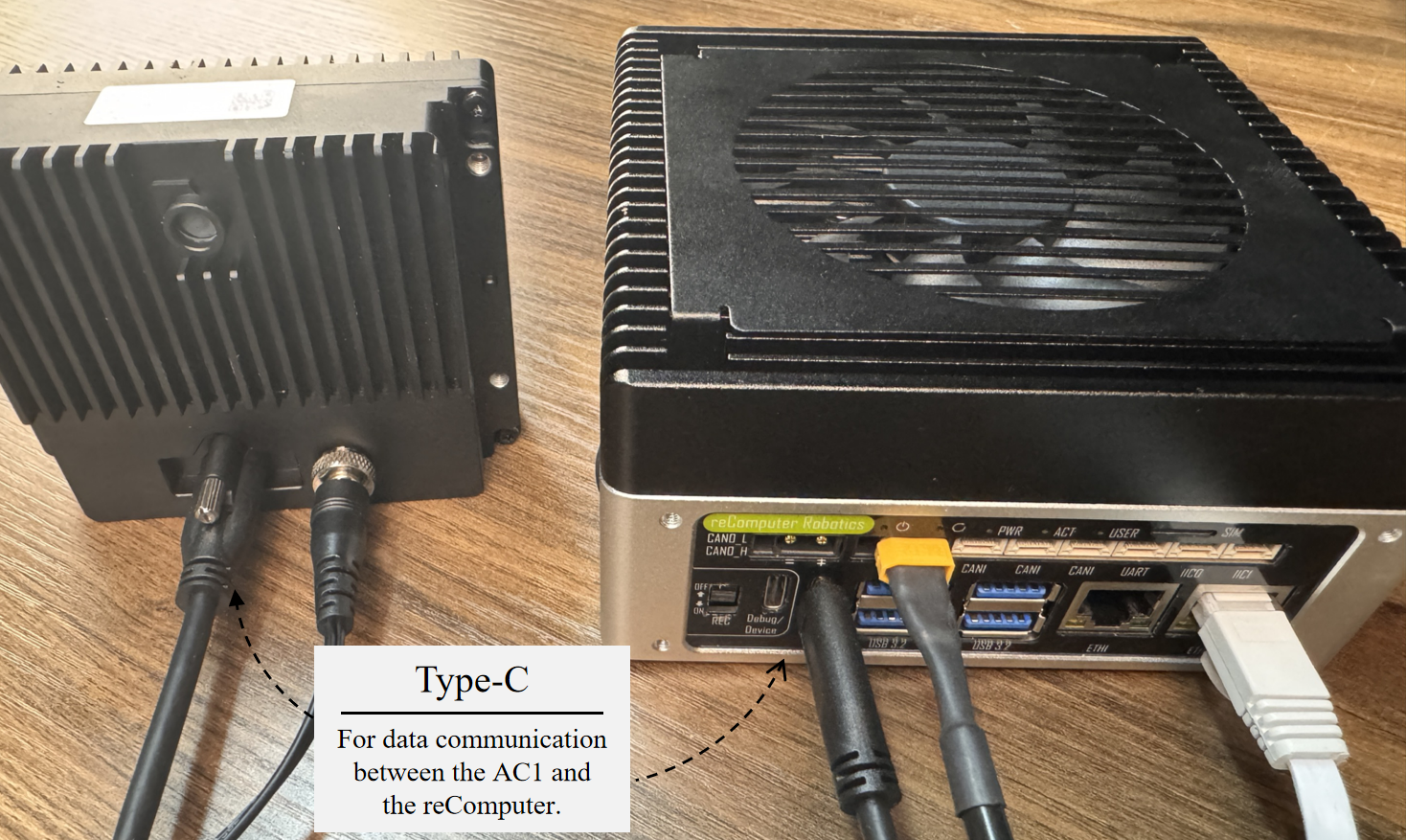
硬件连接
入门指南
步骤 1. 在 reComputer Robotics J4012 上安装 ROS
a. 将以下内容添加到 ~/.bashrc 中。
export CUDA_HOME=/usr/local/cuda
export PATH=$CUDA_HOME/bin:$PATH
export LD_LIBRARY_PATH=$CUDA_HOME/lib64:$LD_LIBRARY_PATH
export PATH=/usr/src/tensorrt/bin:$PATH
info
我们可以通过在终端中输入命令 vim ~/bashrc 来打开文件。
b. 在终端中输入以下命令来安装 ROS2。
sudo apt install software-properties-common -y
sudo add-apt-repository universe
sudo apt update
sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
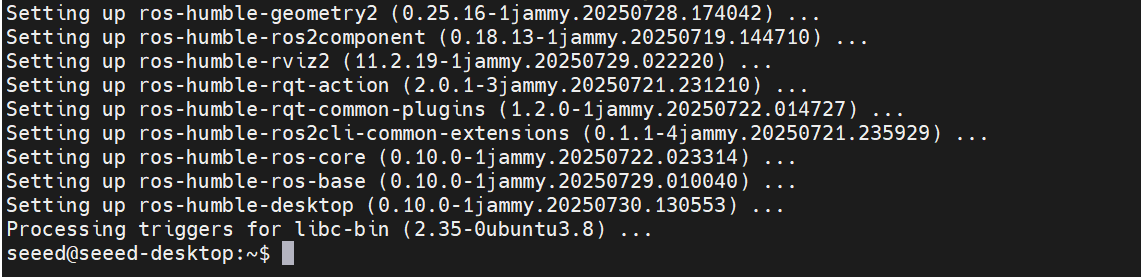
sudo apt install ros-humble-desktop -y
要验证 ROS2 是否已成功安装,我们可以在设备中创建两个新终端并分别运行以下命令。
# terminal1
ros2 run demo_nodes_cpp talker
# terminal2
ros2 run demo_nodes_py listener
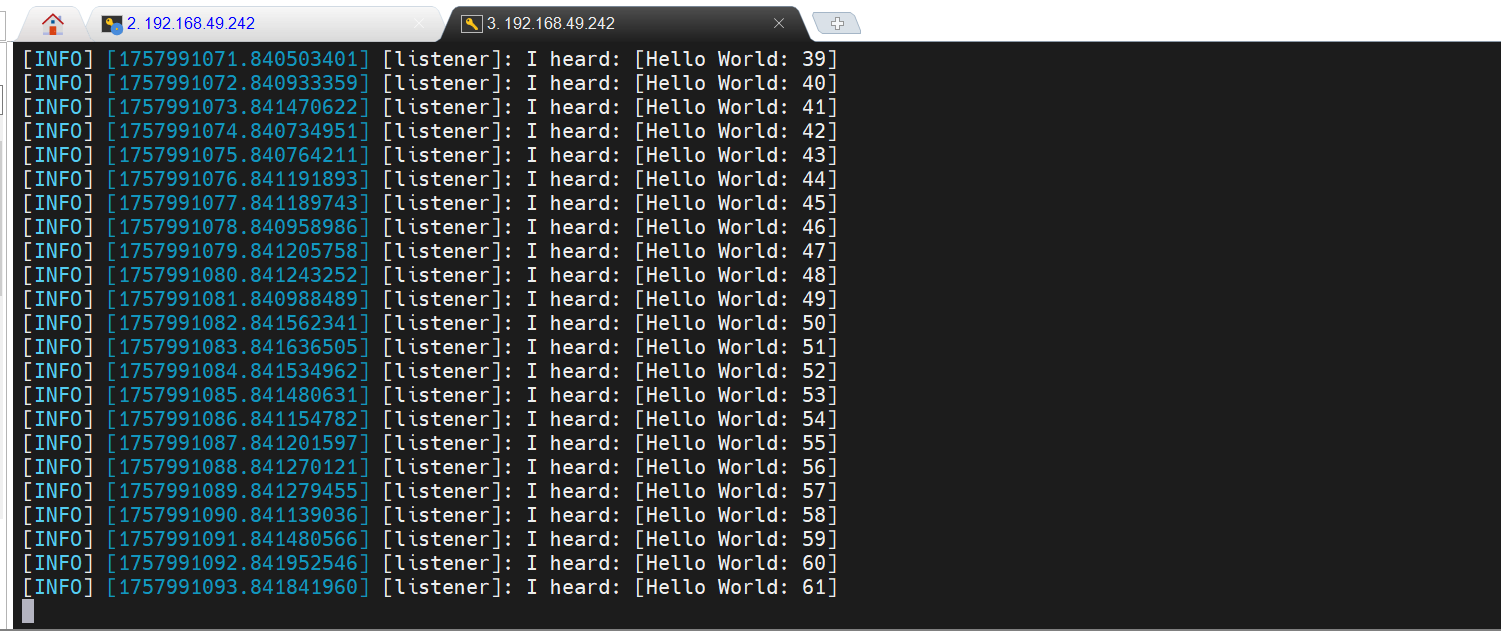
如果两个终端都打印出消息,说明 ROS 2 Humble 已成功安装!🎉
步骤 2. 为 AC1 安装 ROS SDK
在 reComputer 的终端中输入以下命令。
git clone https://github.com/RoboSense-Robotics/robosense_ac_ros2_sdk_infra.git
sudo apt-get install libavformat-dev libavdevice-dev libavcodec-dev
sudo apt install python3-colcon-common-extensions -y
echo "source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash" >> ~/.bashrc
source ~/.bashrc
cd robosense_ac_ros2_sdk_infra/modules/
colcon build
source install/setup.bash

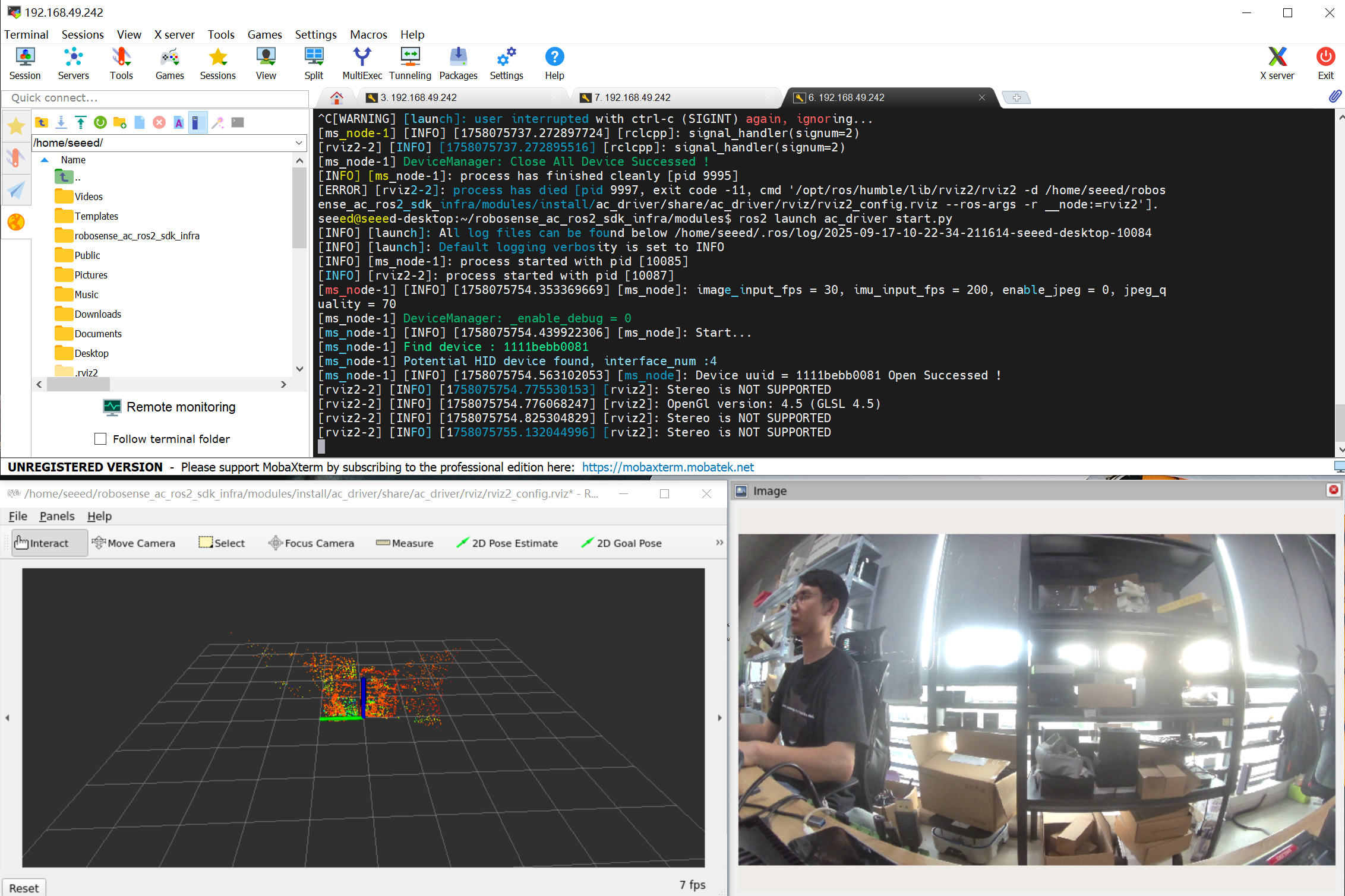
如果一切顺利,我们可以使用 Rviz 可视化 AC1 捕获的环境数据。
ros2 launch ac_driver start.py
下一步
note
许多高级算法可以使用 AC1 与 reComputer Jetson 结合来复现。更多详情,请参考这里。
资源
- https://robosense-wiki-en.readthedocs.io/en/latest/
- https://github.com/RoboSense-Robotics/robosense_ac_ros2_sdk_infra
- https://www.seeedstudio.com/reComputer-Robotics-J3011-with-GMSL-extension-board-p-6538.html
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。