使用 reCamera 的 AI 停车管理演示
简介
停车位可用性是商业停车场、住宅车库、工业园区和校园停车管理等场景中的常见需求,运营商和用户希望快速了解哪些车位被占用或可用。
本项目提供了一个开箱即用的演示,专注于以下应用功能:
- 停车位检测:检测摄像头视野内每个停车位的占用状态。
- 防抖动/稳定化:减少视觉抖动和短期检测波动,使结果更加稳定。
- 计数和汇总:自动汇总当前停车状态,如可用车位数量。
- 屏幕可视化:直接在预览界面上显示检测结果和车位状态,便于快速验证和演示。
硬件准备
要运行此停车管理演示,只需要一台 reCamera 设备。
支持所有 reCamera 变体。
您可以根据部署需求选择任何版本的 reCamera:
- reCamera 2002 系列(Wi-Fi)
- reCamera Gimbal(云台)
- reCamera HQ PoE(以太网 + PoE)
注意:
PoE 版本不支持 Wi-Fi,必须通过支持 PoE 的交换机连接到同一本地网络。
| reCamera 2002 系列 | reCamera Gimbal | reCamera HQ PoE |
|---|---|---|
 |  |  |
设置演示
步骤 1:配置 reCamera
首先,请按照官方入门指南完成 reCamera 的基本配置:reCamera 基本配置
完成初始设置后,确保设备已通电并正确连接到网络。
然后,访问 reCamera 管理界面并进入 Node-RED 工作流页面。
如果您能成功访问如下所示的 Node-RED 工作流界面,说明配置已成功完成。

步骤 2:下载并上传工作流文件
此演示提供了一个预配置的工作流文件,其中已经设置好了所有必需的节点和连接。
您无需手动创建或配置任何 Node-RED 节点。
请从我们的 SenseCraft AI 平台下载工作流文件,然后直接导入到 reCamera 中。有关 Sensecraft AI 教程,请参考链接 访问 SenseCraft AI reCamera 仪表板。
导入工作流后:
- 所有检测、可视化和数据处理节点都将准备就绪。
- 无需额外的参数配置。
- 部署后可立即启动演示。
工作流成功上传并部署后,reCamera 将自动开始在后台运行停车位监控演示。此工作流设计为端到端停车位监控管道,完全在 reCamera 上运行。高级逻辑如下:
-
视频输入
摄像头持续捕获视频帧并将其发送到 AI 推理节点。 -
AI 检测
检测模型识别停车相关对象,并输出带有类别标签(free/car)和置信度分数的边界框。 -
车位关联和稳定化
- 使用 **IoU(交并比)**在帧间匹配检测到的边界框。
- 每个车位只有在连续检测到固定帧数后才进入稳定状态。
- 容忍短期遗漏以防止错误的状态变化。
-
车位池管理
- 每个停车位都存储在车位池中,包含其位置、状态历史和稳定性计数器。
- 消失时间过长的车位会自动移除。
-
可视化层
- 边界框、中心标记、标签和状态面板以 SVG 叠加层的形式渲染。
- 可视化通过 WebSocket 实时更新。
-
自动后台执行
部署后,工作流在后台自动运行,无需手动触发。
检测结果如下所示:
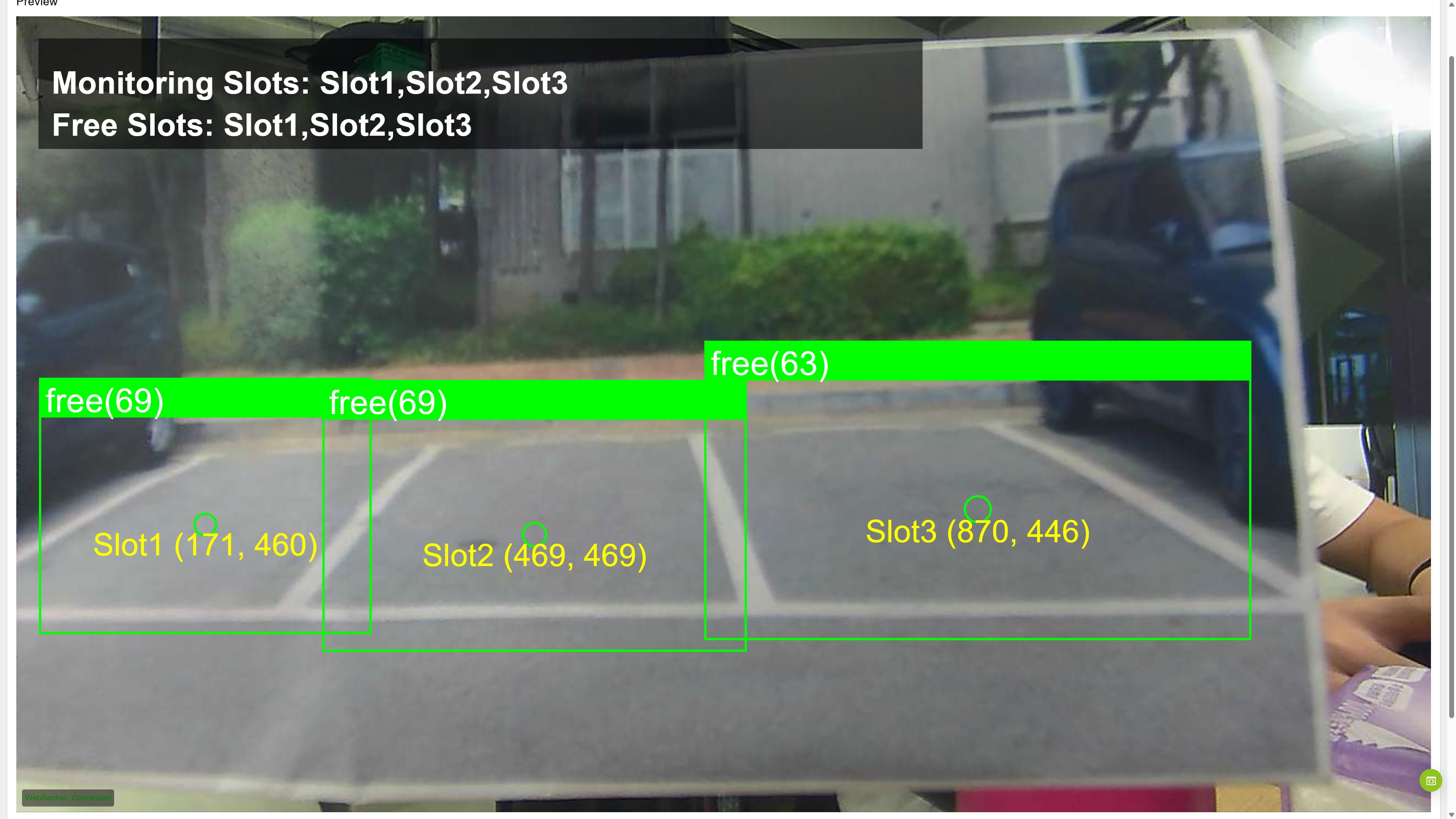
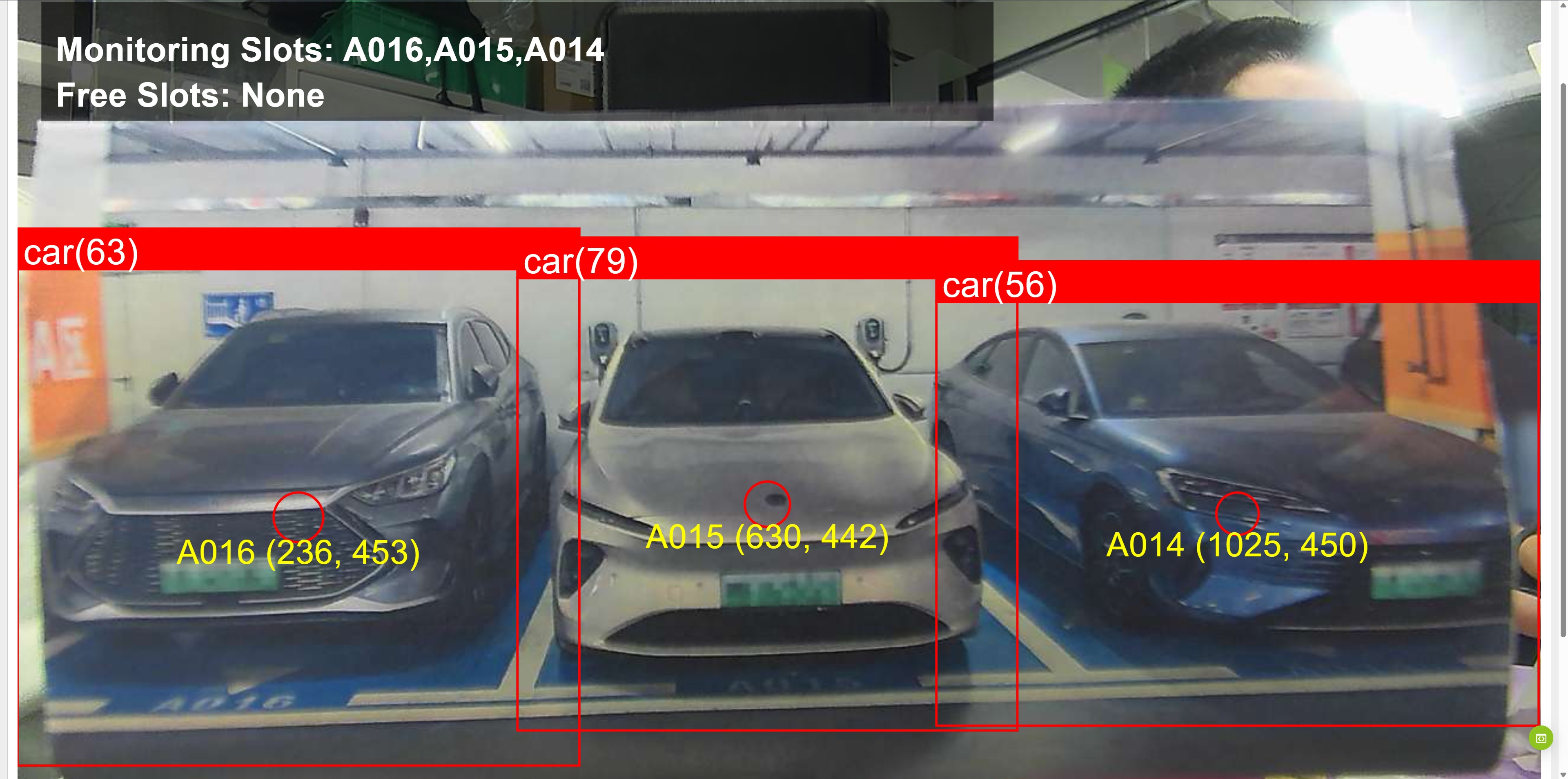
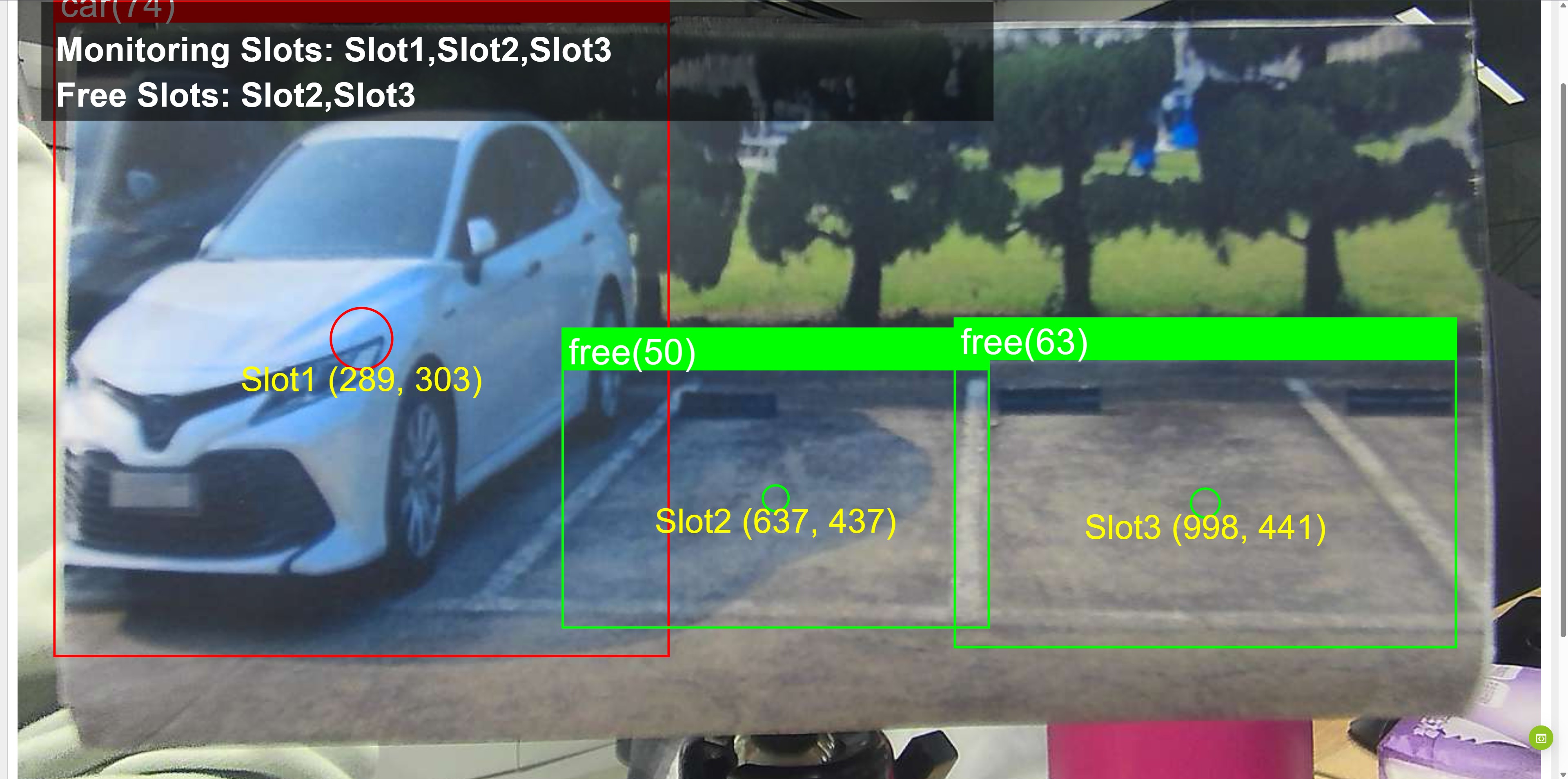
从显示的结果中,您可以观察到以下元素:
-
边界框
每个停车位都与一个检测区域相关联。系统根据 AI 模型输出将每个区域分类为free或car。 -
中心标记(圆圈)
在每个稳定停车位的中心绘制一个圆圈。- 绿色圆圈表示空闲车位
- 红色圆圈表示被占用车位
-
车位标签和坐标
每个车位都标有标签(例如Slot1、Slot2、Slot3)以及其中心坐标(x, y)。
这些标签从您通过 Node-RED 提供的车位名称列表映射而来。 -
状态面板(左上角)
叠加面板汇总整体状态:- Monitoring Slots:当前正在跟踪的所有车位
- Free Slots:经过多帧验证确认为空闲的车位
系统使用多帧稳定化机制来避免由临时遮挡、光照变化或检测噪声引起的闪烁结果。
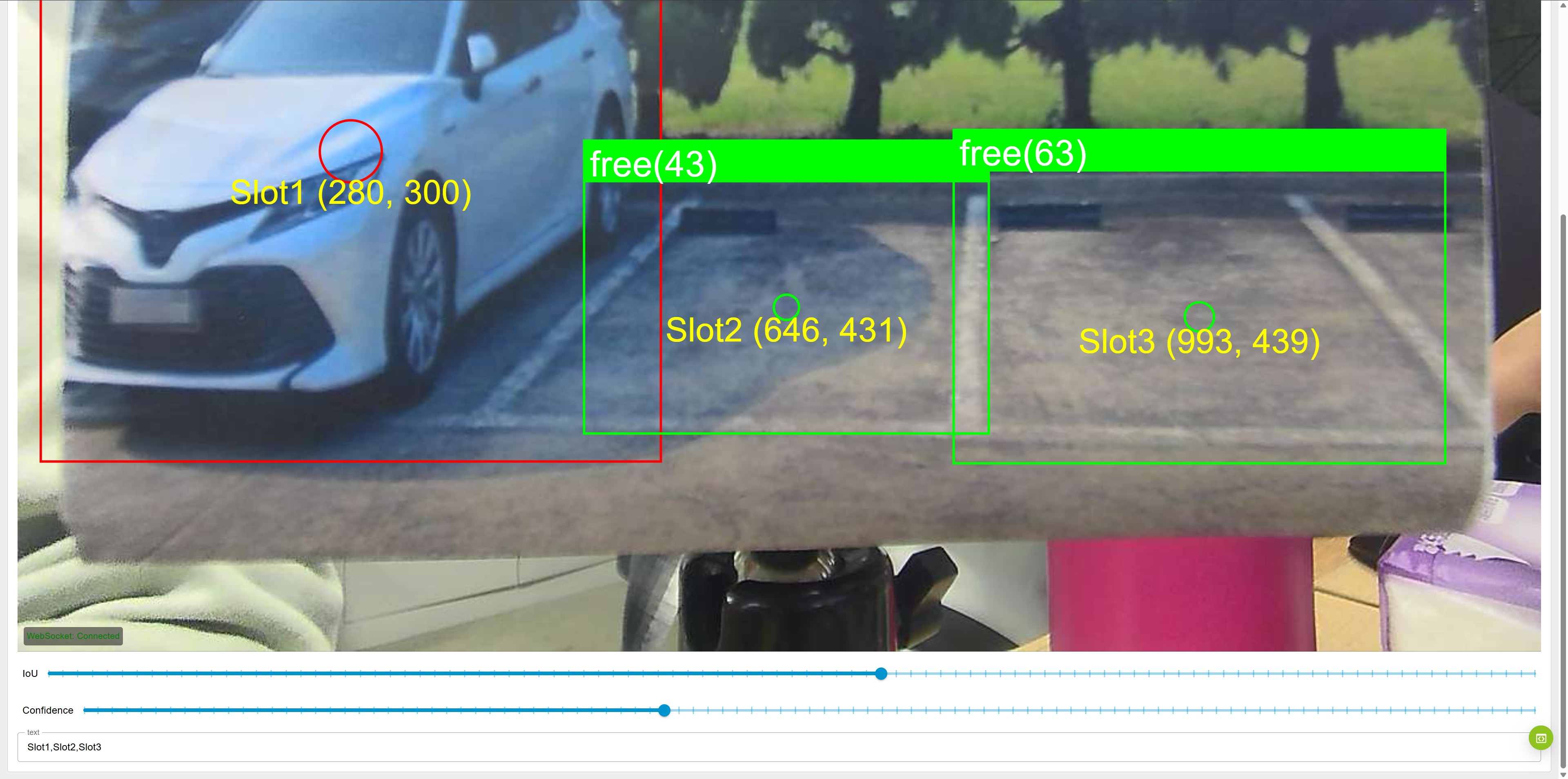
当前的停车位检测逻辑专门设计用于三个并排相邻的停车位。在此演示中,reCamera 安装在停车位前方,直接面向车辆,而不是使用俯视(鸟瞰)视角。
因此,车位关联、中心点定位和稳定性逻辑针对前视视角进行了优化。如果您计划使用俯视摄像头或不同的停车布局,可能需要相应调整车位映射和检测逻辑。
技术支持与产品讨论
感谢您选择我们的产品!如果您需要特定定制目标的指导或想要进一步扩展工作流,请随时联系我们。我们在这里为您提供不同的支持,确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道以满足不同的偏好和需求。