在 Jetson Thor 上通过 OpenClaw 控制 SO-Arm
介绍
本文档解释如何在 Jetson Thor 上结合 OpenClaw 和 LeRobot,通过本地 AI 智能体控制 SO-Arm。
NVIDIA Jetson AGX Thor 是一款为机器人和物理 AI 工作负载设计的高性能边缘 AI 平台,为感知、规划和控制提供强大的本地算力。
SO-Arm 是一个开源、低成本的机械臂平台(SO-ARM100/SO-ARM101),广泛用于具身智能实验、远程操作以及操作任务开发。
OpenClaw 是一个可以编排本地工具和模型的 AI 智能体框架。在本项目中,OpenClaw 用作高层控制接口,而 LeRobot 为 SO-Arm 提供底层电机通信和标定工具。
在本指南中,OpenClaw 负责智能体规划和任务编排,而 SO-Arm 的运动执行由 LeRobot 负责。
目录
硬件准备
设备清单
- 1x NVIDIA® Jetson AGX Thor™ 开发套件
- 1x SO-ARM101 低成本 AI 机械臂


接线与连接
- 通过 USB 将 SO-Arm 控制板连接到 Thor。
- 将匹配的直流电源适配器连接到 SO-Arm 控制板。
- 先给 Thor 上电,然后给机械臂控制板上电。
上电检查清单
- Thor 正常启动且网络可用。
- SO-Arm 控制板指示灯点亮。
- 通过 USB 连接后出现串口设备。
ls /dev/ttyACM*
如果在终端输出中检测到串口节点,则说明硬件连接正确。

在 Jetson Thor 上进行系统设置
更新系统软件包
sudo apt update
sudo apt install -y nvidia-jetpack git curl ffmpeg python3-pip
python3 -m pip install -U pip
安装核心依赖
安装 Miniconda(推荐):
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
创建 LeRobot 环境:
conda create -y -n lerobot python=3.10
conda activate lerobot
pip install 'lerobot[feetech]'
pip uninstall torch torchvision
pip install torch torchvision --index-url https://pypi.jetson-ai-lab.io
在 LeRobot 环境中安装 Pinocchio:
conda install mamba -y
mamba install -c conda-forge pinocchio pinocchio-python libpinocchio -y
验证 CUDA 和外设设备
python -c "import torch; print(torch.cuda.is_available())"
lerobot-find-port
预期结果:
torch.cuda.is_available()输出True- 检测到机械臂串口(例如
/dev/ttyACM0)
安装 Ollama 并运行本地 LLM
安装 Ollama:
curl -fsSL https://ollama.com/install.sh | sh
拉取模型:
ollama pull qwen3.5:35b
本指南以 qwen3.5:35b 为示例。你可以根据性能和内存限制替换为其他 Ollama 模型。
在 Jetson Thor 上安装 OpenClaw
安装 OpenClaw
curl -fsSL https://openclaw.ai/install.sh | bash
配置运行参数
编辑 ~/.openclaw/openclaw.json,并将 Ollama 设置为默认模型提供方:
openclaw.json
{
"agents": {
"defaults": {
"compaction": {
"mode": "safeguard"
},
"maxConcurrent": 4,
"model": {
"primary": "ollama/qwen3.5:35b"
},
"subagents": {
"maxConcurrent": 8
},
"workspace": "/home/seeed/.openclaw/workspace"
},
"list": [
{
"id": "main",
"tools": {
"profile": "full"
}
}
]
},
"commands": {
"native": "auto",
"nativeSkills": "auto",
"ownerDisplay": "raw",
"restart": true
},
"gateway": {
"auth": {
"mode": "token",
"token": "98aefed421e9a506a3174dab0575fd3cc36c9d15b856a894"
},
"bind": "loopback",
"mode": "local",
"nodes": {
"denyCommands": [
"camera.snap",
"camera.clip",
"screen.record",
"contacts.add",
"calendar.add",
"reminders.add",
"sms.send"
]
},
"port": 18789,
"tailscale": {
"mode": "off",
"resetOnExit": false
}
},
"messages": {
"ackReactionScope": "group-mentions"
},
"meta": {
"lastTouchedAt": "2026-03-10T06:45:16.014Z",
"lastTouchedVersion": "2026.3.8"
},
"models": {
"providers": {
"ollama": {
"api": "ollama",
"apiKey": "ollama-local",
"baseUrl": "http://127.0.0.1:11434",
"models": [
{
"contextWindow": 262144,
"cost": {
"cacheRead": 0,
"cacheWrite": 0,
"input": 0,
"output": 0
},
"id": "qwen3.5:35b",
"input": [
"text",
"image"
],
"name": "qwen3.5:35b",
"reasoning": true
},
{
"contextWindow": 262144,
"cost": {
"cacheRead": 0,
"cacheWrite": 0,
"input": 0,
"output": 0
},
"id": "qwen3.5",
"input": [
"text",
"image"
],
"name": "qwen3.5",
"reasoning": true
}
]
}
}
},
"session": {
"dmScope": "per-channel-peer"
},
"tools": {
"profile": "coding"
},
"wizard": {
"lastRunAt": "2026-03-10T02:17:28.382Z",
"lastRunCommand": "onboard",
"lastRunMode": "local",
"lastRunVersion": "2026.3.8"
}
}
可选:你也可以直接使用 Ollama 提供的脚本快速设置 OpenClaw 配置文件。
ollama launch openclaw --model qwen3.5
更多配置
安装 SO-Arm 控制技能:
- 下载 soarm-control 技能
- 将其解压到
~/.openclaw/workspace/skills
准备机器人描述文件:
- 下载 SO-ARM101 URDF
- 将其移动到
~/.openclaw/workspace/skills/soarm-control/references
[可选] 添加检测模型:
- 参考这里训练一个检测模型(YoloV11n)
- 将检测模型(
best.pt)移动到~/.openclaw/workspace/skills/soarm-control/scripts
重启 OpenClaw 网关:
openclaw gateway restart
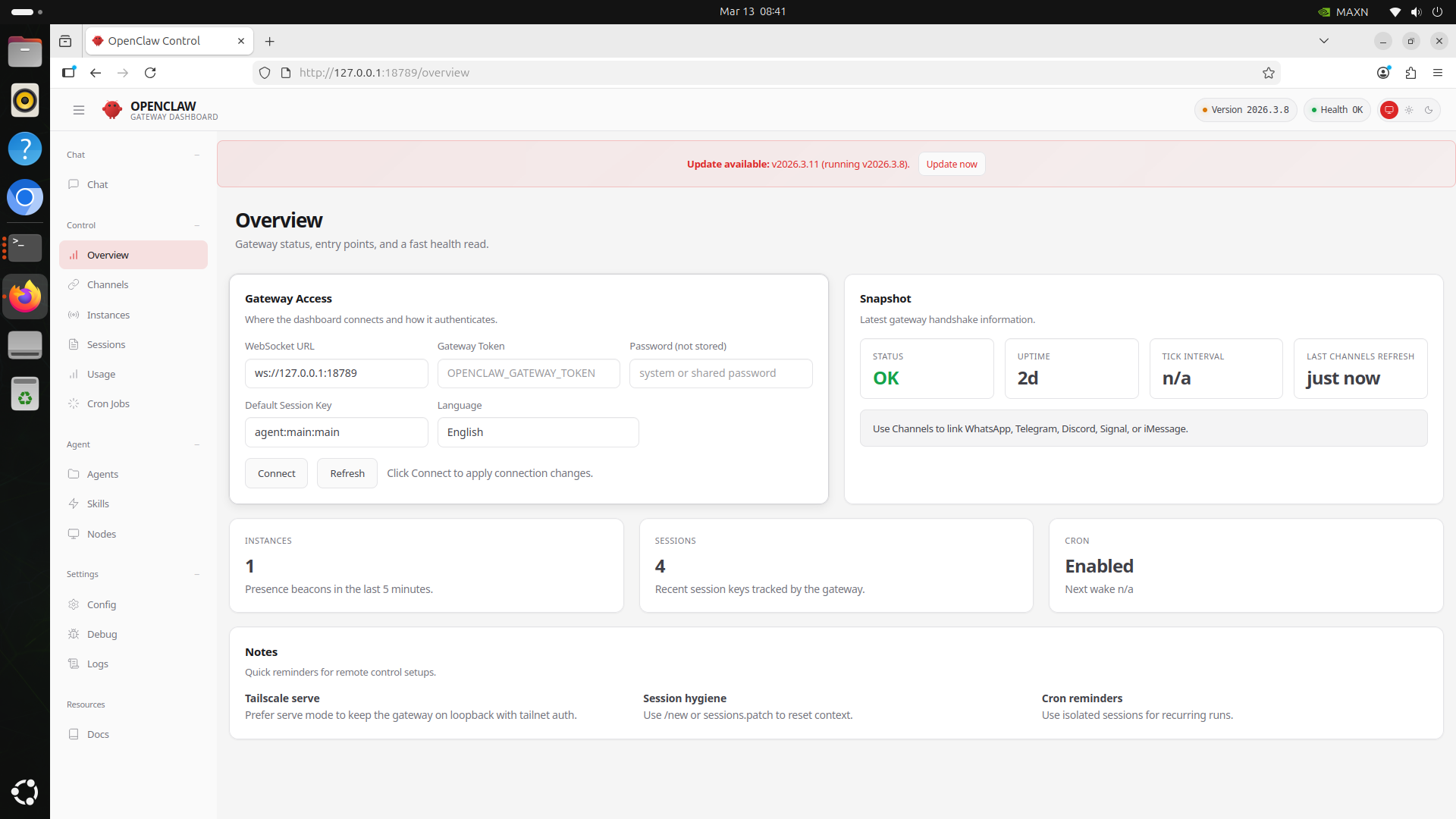
打开 WebUI:
http://127.0.0.1:18789/wiki
连接并标定 SO-Arm
串口权限与检测
conda activate lerobot
lerobot-find-port
sudo chmod 666 /dev/ttyACM*
初始标定
标定从动机械臂:
lerobot-calibrate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=openclaw_soarm
标定文件保存在:
~/.cache/huggingface/lerobot/calibration/
完整的标定流程请参考: SO-Arm in LeRobot - Calibrate
运行控制演示
启动后端服务
确保 OpenClaw 和 LeRobot 环境已就绪:
openclaw gateway restart
conda activate lerobot
cd ~/.openclaw/workspace/skills/soarm-control
bash scripts/start_server.sh &
执行基础运动任务
在 OpenClaw WebUI 中输入机器人控制指令。OpenClaw 会解析你的提示词,并调用已安装的 soarm-control 技能驱动机械臂移动到目标位置。
参考资料
- https://docs.openclaw.ai/
- https://wiki.seeedstudio.com/cn/local_openclaw_on_recomputer_jetson/
- https://unstabledemos.com/tutorials/openclaw-orin-nano/
- https://wiki.seeedstudio.com/cn/lerobot_so100m_new/
- https://github.com/huggingface/lerobot
- https://github.com/TheRobotStudio/SO-ARM100
技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,确保你在使用我们产品的过程中尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。