Robotics J501 硬件与快速上手
reComputer Robotics J501 是一款为高级机器人和工业应用设计的高性能边缘 AI 载板。它兼容 NVIDIA Jetson AGX Orin 模块(32GB/64GB),在 MAXN 模式下可提供高达 275 TOPS 的 AI 性能。
该载板配备了丰富的连接选项——包括 1 路 10GbE 和 4 路 1GbE 以太网端口、用于 NVMe SSD 的双 M.2 Key M 插槽、用于 5G 和 Wi-Fi/BT 模块的 M.2 插槽、多路 USB 3.0 端口、四路 CAN 接口(2 路原生 + 2 路 SPI-to-CAN)、GMSL2 摄像头扩展,以及包括 DI/DO、I2S、UART 和 RS485 在内的完整 I/O——可作为复杂多传感器融合和实时 AI 处理的强大机器人“大脑”。
预装 JetPack 6.2.1 和 Linux BSP,可确保无缝部署。支持 NVIDIA Isaac ROS、Hugging Face、PyTorch 和 ROS 2/1 等框架,J501 将大语言模型驱动的决策与物理机器人控制连接起来,通过开箱即用的接口和优化的 AI 框架,加速自主机器人的开发。

关键特性
- 高性能 AI:搭载 Jetson AGX Orin 32/64GB 模块,Ampere GPU 和 DLA 引擎,最高可达 275 TOPS
- 丰富连接性:双 M.2 Key M(NVMe);Key E(WiFi/BT)+ Key B(5G);1 路 10GbE + 4 路 1GbE;3 路 USB 3.0;2 路 USB-C
- 四路 CAN-FD:2 路原生 + 2 路 SPI-to-CAN 接口,具备电气隔离
- GMSL2 视觉:单路 GMSL2 接口(1 路),用于高速摄像头连接
- 工业级设计:19-48V 直流输入;-10~60°C 工作温度;隔离接口;预装 JetPack 6.2.1
- 面向机器人:支持 ROS 2/1、Isaac ROS;DI/DO、I2S、UART、RS485;针对 AMR 和自动化进行了优化
规格参数
| Jetson AGX Orin 系统模块 | ||
|---|---|---|
| 规格 | reComputer Robotics J5011 | reComputer Robotics J5012 |
| 模块 | NVIDIA Jetson AGX Orin 32GB | NVIDIA Jetson AGX Orin 64GB |
| AI 性能 | 200 TOPS | 275 TOPS |
| GPU | 1792 核 NVIDIA Ampere @ 930 MHz | 2048 核 NVIDIA Ampere @ 1.3 GHz |
| CPU | 8 核 Arm Cortex-A78AE @ 2.0 GHz | 12 核 Arm Cortex-A78AE @ 2.2 GHz |
| 内存 | 32GB 256-bit LPDDR5 @ 204.8 GB/s | 64GB 256-bit LPDDR5 @ 204.8 GB/s |
| 视频编码器 | 1x 4K60 / 3x 4K30 / 6x 1080p60 / 12x 1080p30(H.265) | 2x 4K60 / 6x 4K30 / 8x 1080p60 / 16x 1080p30(H.265) |
| 视频解码器 | 1x 8K30 / 2x 4K60 / 4x 4K30 / 9x 1080p60 / 18x 1080p30(H.265) | 1x 8K30 / 3x 4K60 / 7x 4K30 / 11x 1080p60 / 22x 1080p30(H.265) |
| CSI 摄像头 | 最多支持 6 路摄像头(通过虚拟通道可达 16 路) 16 路 MIPI CSI-2 D-PHY 2.1(最高 40Gbps)/ C-PHY 2.0(最高 164Gbps) | |
| 机械尺寸 | 100mm x 87mm 699 针 Molex Mirror Mezz 连接器 集成导热板 | |
| 载板 | ||
| 存储 | 2x M.2 Key-M(NVMe 2280 SSD) 1x M.2 Key-B(用于 4G/5G 模块) | |
| 网络 | 1x M.2 Key-E(WiFi/BT) 1x RJ45 10GbE + 4x RJ45 1GbE | |
| USB | 3x USB 3.0 Type-A 1x USB 3.0 Type-C(Recovery) 1x USB 2.0 Type-C(Debug UART) | |
| DI/DO/CAN | 1x 2x10P 3.81mm 端子排 - 4x DI @12V + 4x DO @40V + 4x CAN(支持 CAN-FD,电气隔离) | |
| GMSL | 2x Mini-Fakra 连接器(用于 8 路 GMSL2 摄像头)(可选) | |
| 串口 | 2x DB9(RS232/422/485) | |
| 显示 | 1x HDMI 2.1 | |
| 风扇 | 1×12 V(2.54 mm),1×5 V(1.25 mm JST) | |
| 按键 | 1x Recovery + 1x Reset | |
| LED | 3x LED(PWR、SSD 和用户 LED) | |
| RTC | 1x CR1220 电池座,1x RTC 2 针排针 | |
| 电源输入 | 通过 5.08mm 端子排输入 19-48V 直流电(不含电源适配器) | |
| 功耗 | Jetson AGX Orin 模块:最高 60W(MAXN 模式) 整机峰值:75W(包括外设) | |
| 软件 | Jetpack 6.2.1 | |
| 机械特性 | 尺寸:210mm x 180mm x 87mm(含支架) | |
| 质保 | 2 年 | |
| 认证 | RoHS、REACH、CE、FCC、UKCA、KC | |
GMSL 扩展板规格(可选)
| 解串器 | MAX96712 |
|---|---|
| GMSL 接口 | 2x Robotics-Fakra 公头连接器 |
| GMSL 输入 | 最多 8 路 GMSL2 摄像头 |
| 连接方式 | GMSL2 Fakra 1 分 4 公对公线缆 |
| POC 接口特性 | 支持电源与数据同时传输 |
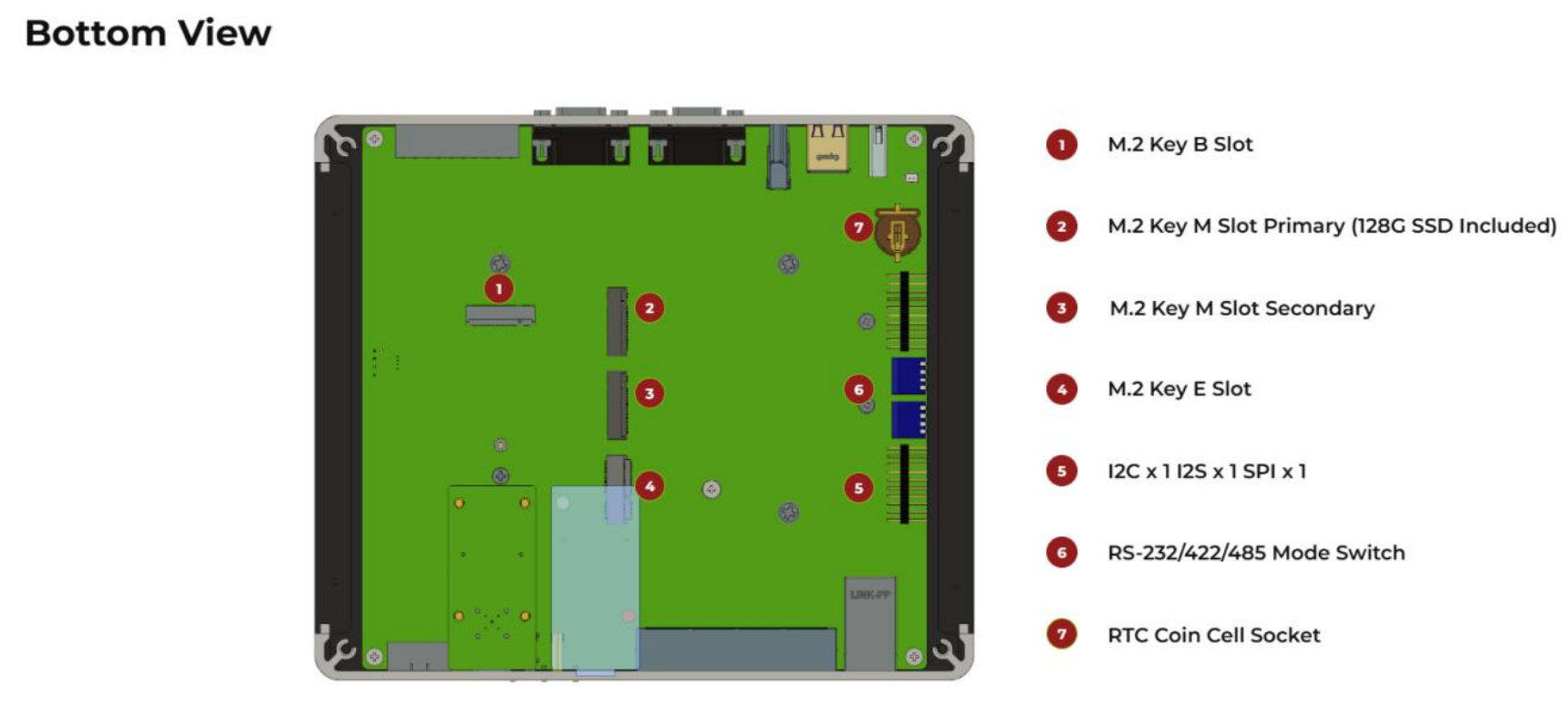
硬件总览


📦 刷写 JetPack 操作系统
支持的模块
前置准备
- Ubuntu 主机电脑
- reComputer Robotics J501
- USB Type-C 数据传输线
我们建议您使用物理 Ubuntu 主机设备,而不是虚拟机。 请参考下表准备主机设备。
| JetPack Version | Ubuntu Version (Host Computer) | ||
| 18.04 | 20.04 | 22.04 | |
| JetPack 6.x | ✅ | ✅ | |
准备 JetPack 镜像
在这里,我们需要根据所使用的 Jetson 模块,在 Ubuntu 主机上下载对应的系统镜像:
| Jetpack 版本 | Jetson 模块 | GMSL | 下载链接 1 | SHA256 |
|---|---|---|---|---|
| 6.2.1 | AGX Orin 64GB | ✅ | Download | 46167c63566fa07d9882be338becd44 7021c8fc0a73da18d0291c414cf5c6f4a |
| AGX Orin 32GB | ✅ | Download | e868fd8c7ad05d3acc8c9808f42e1835 28f11df14f48cb6ae16464adb4f23d1f |
JetPack 6 镜像文件大小约为 14.2GB,下载大约需要 60 分钟,请耐心等待下载完成。
要验证下载固件的完整性,您可以对比 SHA256 哈希值。
在 Ubuntu 主机上打开终端,运行命令 sha256sum <File> 以获取已下载文件的 SHA256 哈希值。如果得到的哈希值与 wiki 中提供的 SHA256 哈希值一致,则说明你下载的固件是完整且未损坏的。
⚙️ SEEED 的 Jetson 载板的所有 .dts 文件和其他源代码可以从此处下载: Linux_for_Tegra
进入强制恢复模式
在继续安装步骤之前,我们需要确保开发板处于强制恢复模式。
分步说明
步骤 1. 使用 USB Type-C 数据线连接 USB2.0 DEVICE 接口和 Ubuntu 主机电脑。
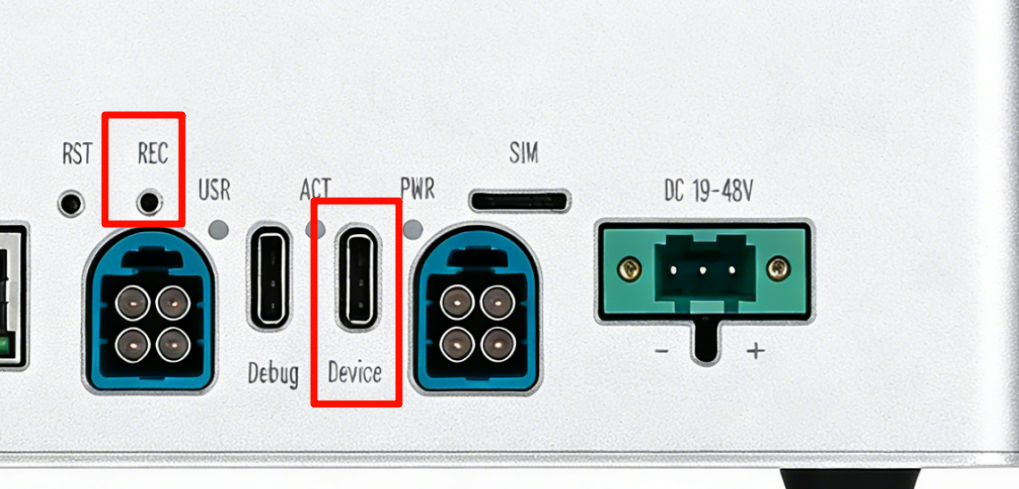
步骤 2. 使用细针插入 RECOVERY 孔按下恢复按键,并保持按住。
步骤 3. 接通电源。
步骤 4. 松开恢复按键。
步骤 5. 在 Linux 主机电脑上打开终端窗口并输入命令 lsusb。如果返回的内容中根据你所使用的 Jetson SoM 出现以下任一输出,则说明开发板已进入强制恢复模式。
- 对于 AGX Orin 32GB:0955:7223 NVidia Corp
- 对于 AGX Orin 64GB:0955:7023 NVidia Corp
下图为 AGX Orin 32GB 的示例:

刷写到 Jetson
步骤 1: 解压下载的镜像文件:
cd <path-to-image>
sudo tar xpf mfi_xxxx.tar.gz
# For example: sudo tar xpf mfi_recomputer-robo-agx-orin-32g-j501-6.2.1-36.4.4-2026-02-11.tar.gz
步骤 2: 执行以下命令将 JetPack 系统刷写到 NVMe SSD:
cd mfi_xxxx
# For example: cd mfi_recomputer-robo-agx-orin-j501x
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --flash-only --massflash 1 --network usb0 --showlogs
如果刷写过程成功,你将看到如下输出

刷写命令可能需要运行 2-10 分钟。
步骤 3: 使用 PD 转 HDMI 转接器将 Robotics J501 连接到支持 HDMI 输入的显示器,或者使用 PD 线缆直接连接到支持 PD 输入的显示器,并完成初始配置设置:

请根据你的需求完成 系统配置(System Configuration)。
🔌 接口使用
下面将介绍 Robotics J501 板上的各类接口及其使用方法。
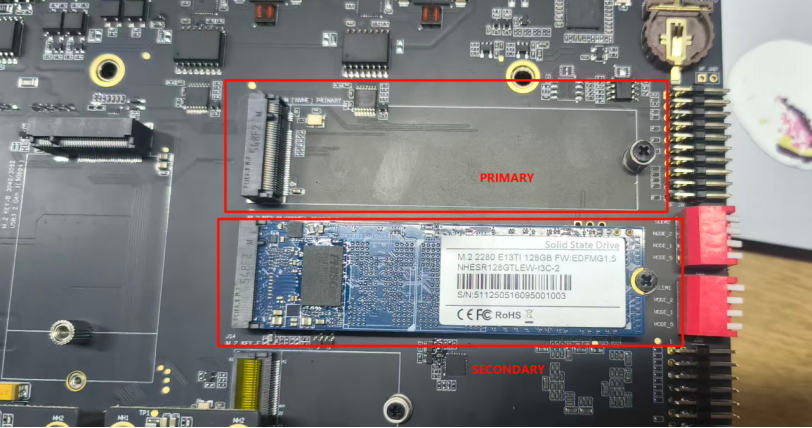
M.2 Key M
J501 包含双 M.2 Key M 插槽,支持 PCIe Gen4x4 NVMe SSD,用于高速存储扩展。
支持的 SSD 如下
- 128GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
硬件连接
使用说明
在 Jetson 设备上打开终端,输入以下命令测试 SSD 的读写速度。
步骤 1. 创建测试目录和文件:
mkdir ssd
touch ~/ssd/test
步骤 2. 测试写入性能:
dd if=/dev/zero of=/home/$USER/ssd/test bs=1024M count=5 conv=fdatasync

步骤 3. 查看 SSD 信息:
nvme list

测试完成后,请运行 sudo rm /home/$USER/ssd/test 命令删除缓存文件。
M.2 Key E(WiFi/BT)
M.2 Key E 插槽支持 Wi-Fi 6 和 Bluetooth 5.x 模块,用于无线连接。
硬件连接
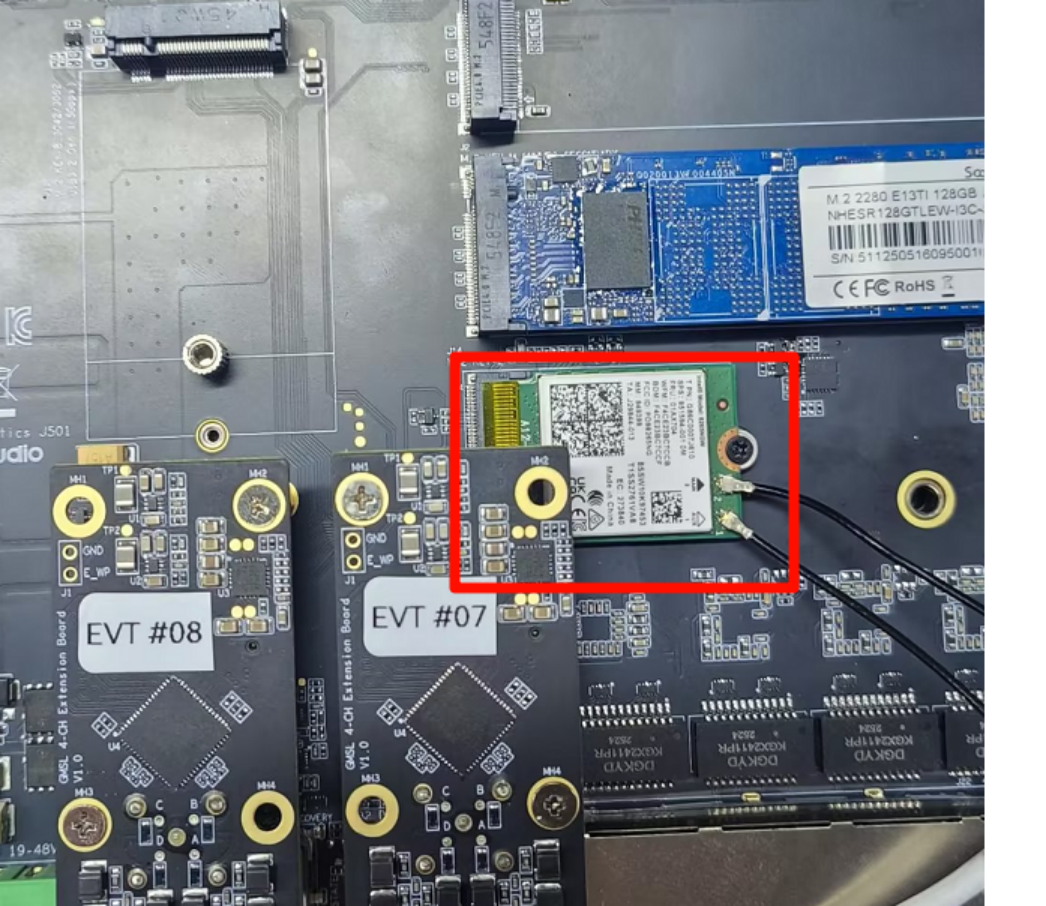
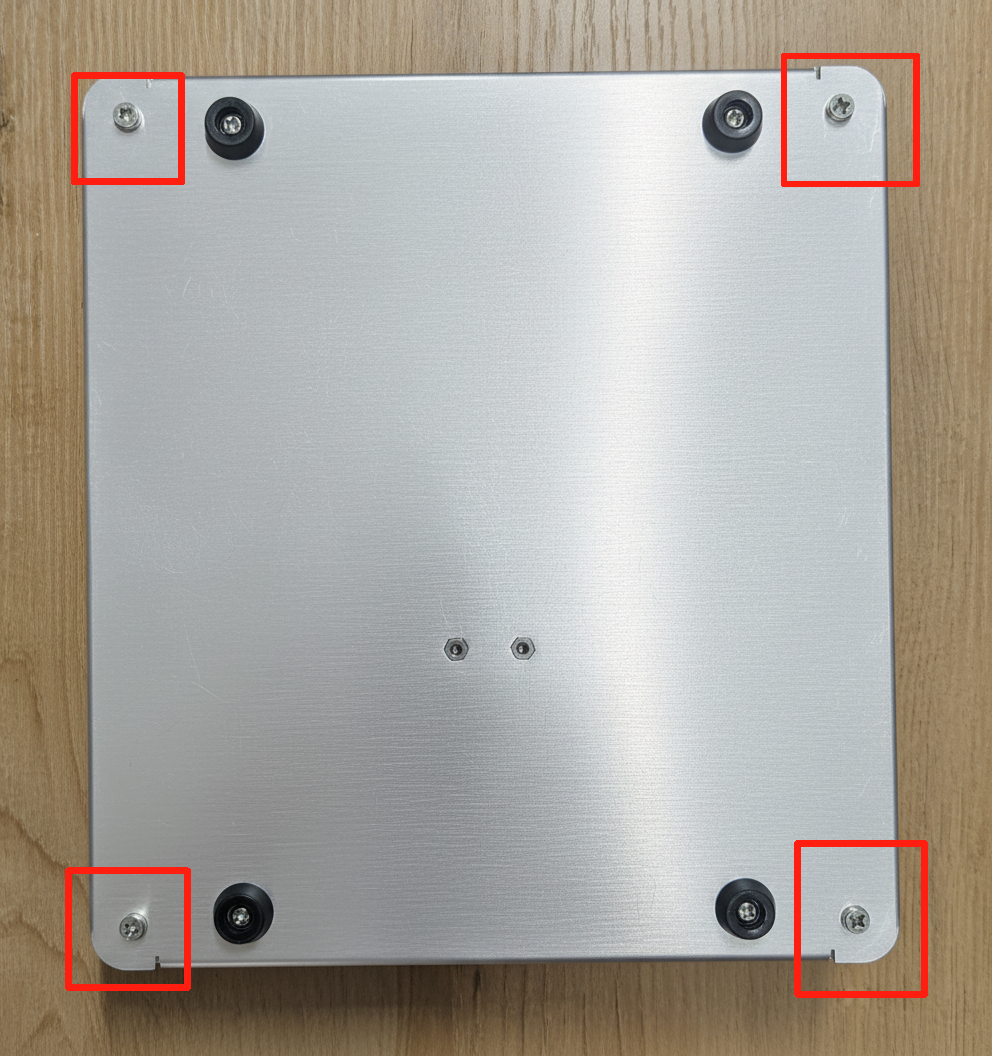
注意:在使用该接口之前,必须先卸下外壳螺丝,并按照下图所示安装对应模块。
使用说明
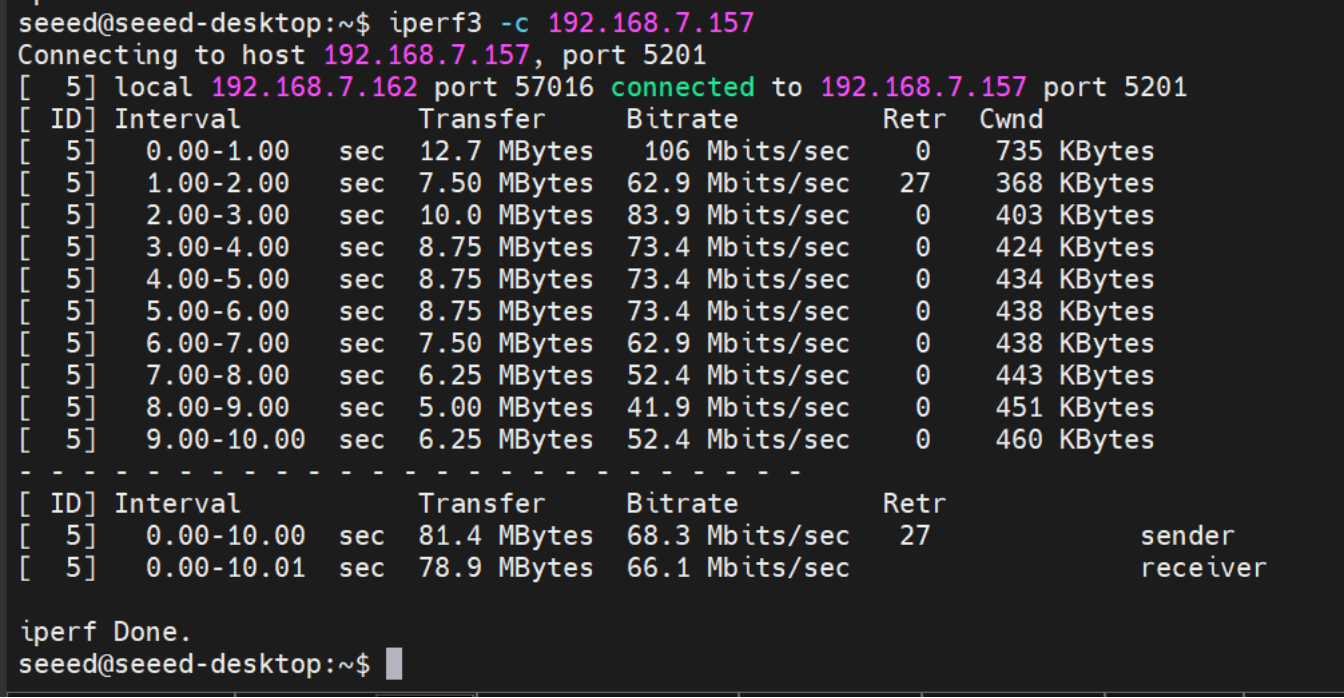
性能测试: 要测试 Wi-Fi 性能,请使用以下命令(将 IP 地址替换为你的测试服务器):
# On server: iperf3 -s
# On client:
iperf3 -c 192.168.7.157
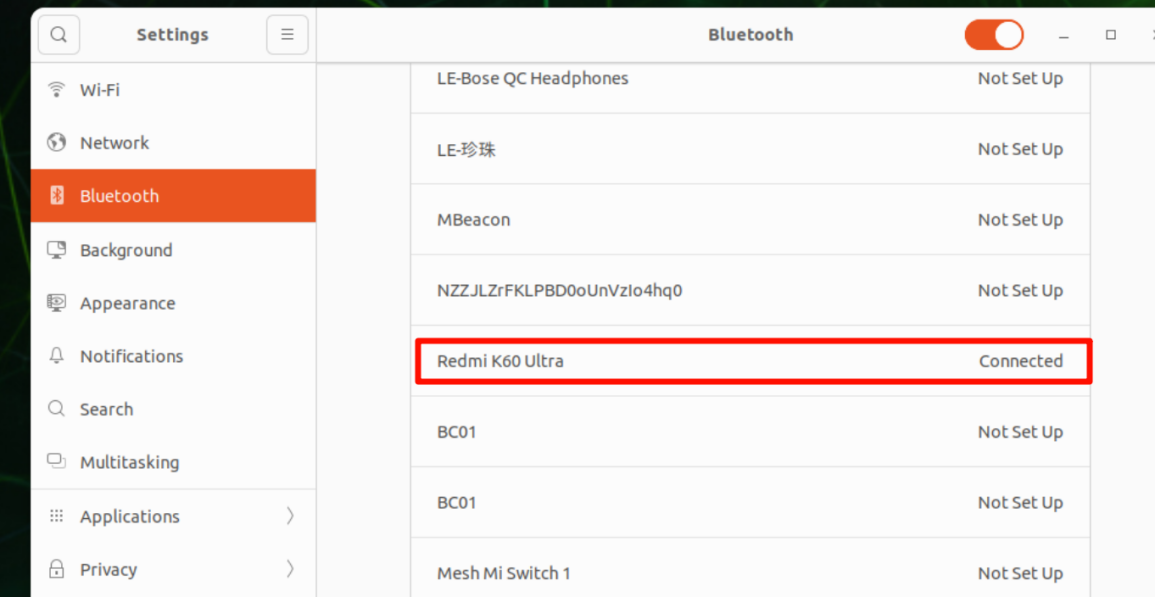
通过 M.2 Key E 插槽可以使用 Bluetooth 功能。 Bluetooth 测试:
M.2 Key B(4G/5G 模块)
M.2 Key B 插槽支持带 Nano SIM 卡座的 4G/5G 蜂窝模块。
硬件连接
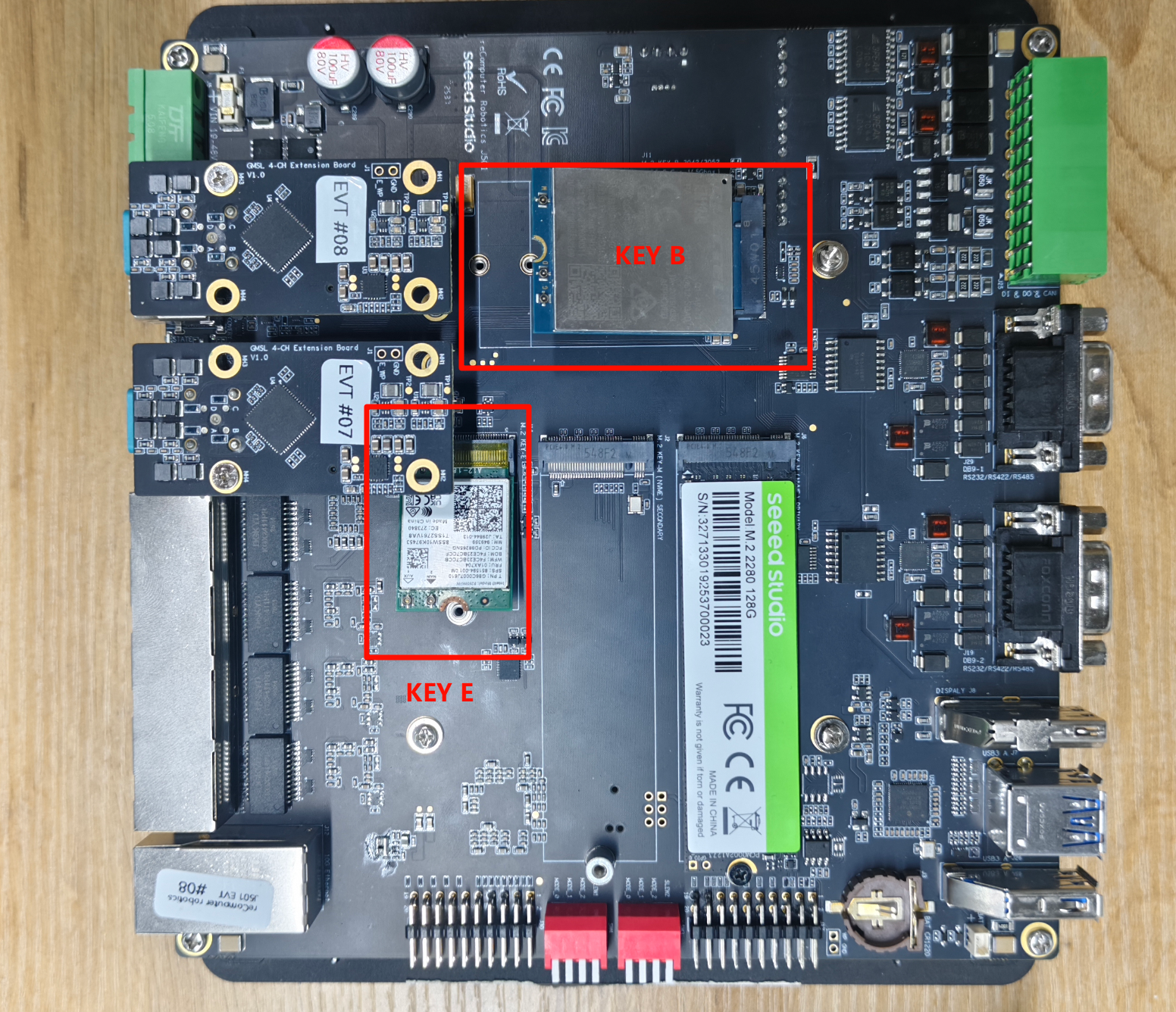
注意:在使用该接口之前,必须先卸下外壳螺丝,并按照下图所示安装对应模块。
使用说明
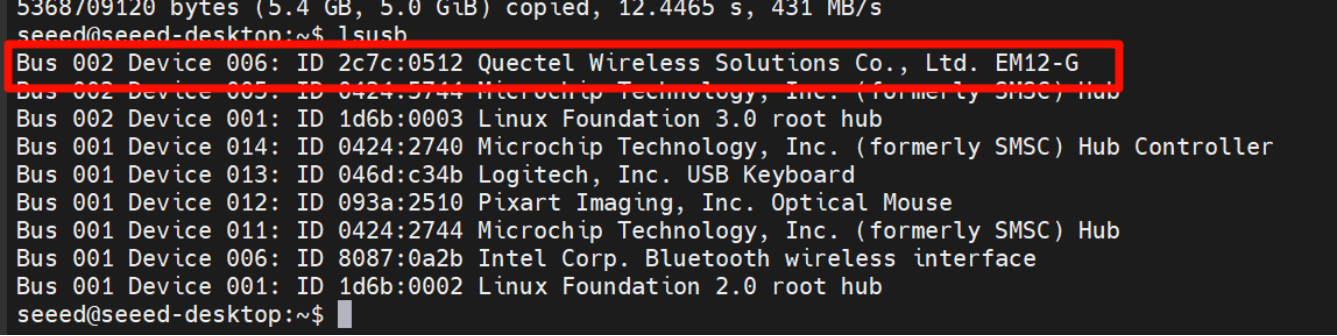
步骤 1. 检查硬件识别情况
lsusb
该命令会显示系统中连接的所有 USB 设备列表,以及它们的厂商(ID)、类型和其他信息。例如,输出中可能会显示来自 Quectel Wireless Solutions Co., Ltd. 的 EM12-G 设备,表明 5G 模块已存在。
步骤 2. 确认驱动加载情况 必须确保 5G 模块所需的 option 驱动已加载。我们可以使用 lsmod 命令进行检查。
lsmod | grep option
如果 option 驱动加载成功,输出中会显示与该驱动相关的信息。

步骤 3. 配置 ModemManager ModemManager 是一个用于管理调制解调器设备的工具,需要安装并重启。
sudo apt install modemmanager
sudo systemctl restart ModemManager
apt install 命令用于安装 ModemManager 软件包,而 systemctl restart 用于重启 ModemManager 服务,以确保新设置生效。
步骤 4. 验证模块识别情况 我们可以使用 mmcli -L 命令检查 ModemManager 是否能够正确识别 5G 模块。
mmcli -L
如果 5G 模块被识别,将会显示类似 /org/freedesktop/ModemManager1/Modem/0 的输出,表示检测到的调制解调器设备路径。

步骤 5. 设置 APN APN(接入点名称,Access Point Name)对于移动设备连接网络至关重要。我们将使用 nmcli 命令创建承载配置文件。以中国移动为例,可以使用以下命令创建配置文件:
sudo nmcli con add type gsm ifname "*" apn "CMNET" ipv4.method auto
该命令会添加一个新的 GSM(全球移动通信系统,Global System for Mobile Communications)类型连接,将 APN 指定为 "CMNET",并使用自动 IPv4 配置。
步骤 6. 激活连接 创建承载配置文件后,我们需要激活该连接。
sudo nmcli con up "gsm"
该命令会激活 GSM 连接,如果成功,将显示确认信息。

步骤 7. 再次验证模块识别情况 再次运行 mmcli -L 命令,以确保在配置 APN 之后模块仍然被识别。
mmcli -L
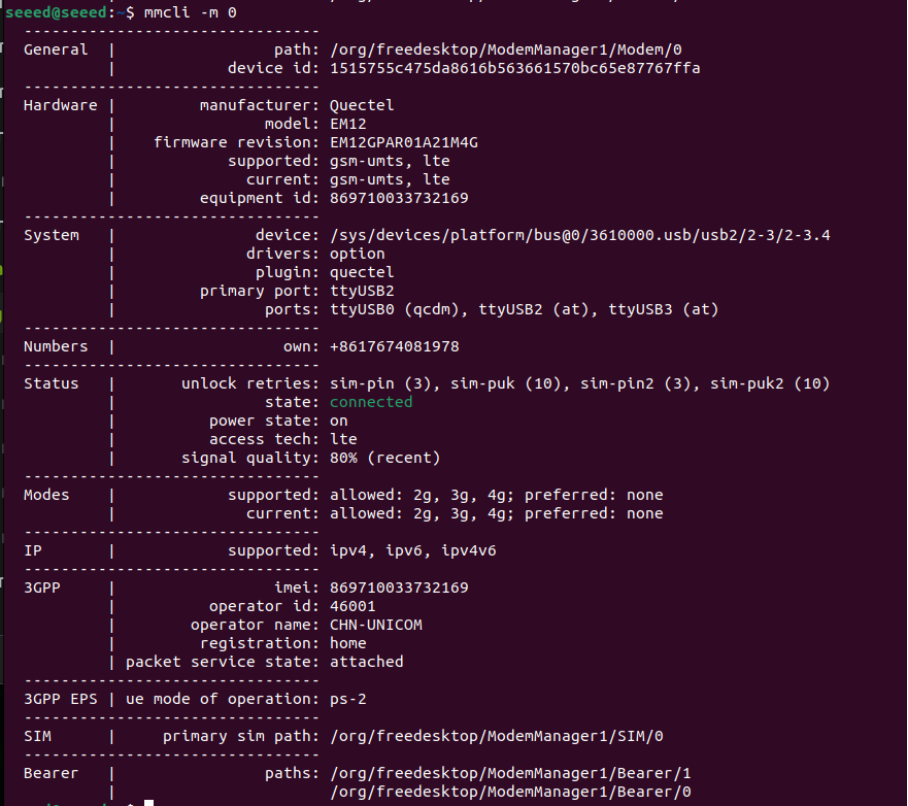
步骤 8. 检查模块状态 最后,我们可以使用 mmcli -m 0 命令查看模块的详细信息,例如 IP 分配、运营商以及网络连接状态。
mmcli -m 0
该命令会提供有关 5G 模块的详细信息,包括其制造商、型号、支持和当前使用的网络技术、设备状态以及已连接的网络运营商。
以太网
Robotics J501 提供 1 个 10GbE(原生)和 4 个 1GbE(通过 PCIe 交换芯片)的 RJ45 接口。10GbE 接口采用 TI TQSPH-10G PHY,支持 10/5/2.5/1/0.1 GbE 五种速率。1GbE 接口支持 10/100/1000M 速率。
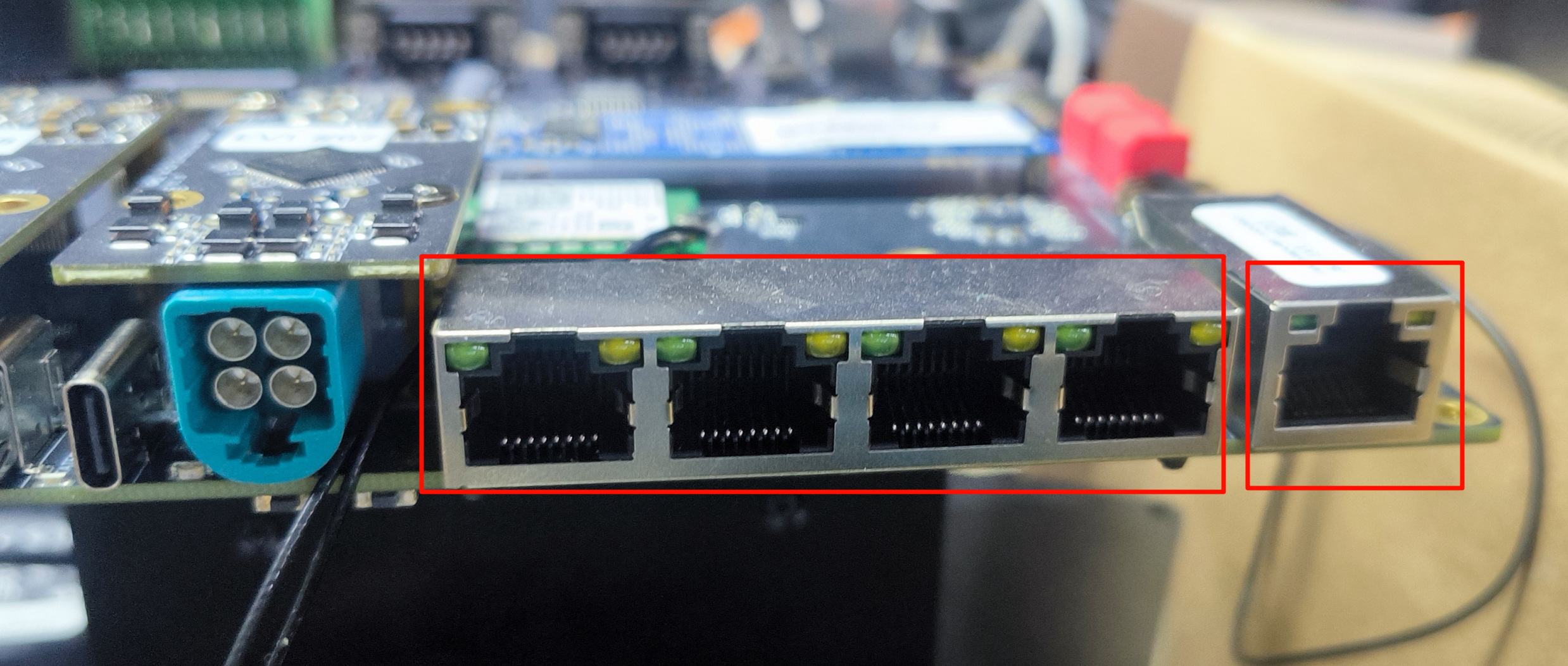
每个端口的 LED 指示灯:
- 绿色 LED: 在 10G/5G/2.5G/1000M 链路时常亮
- 黄色 LED: 闪烁表示网络活动
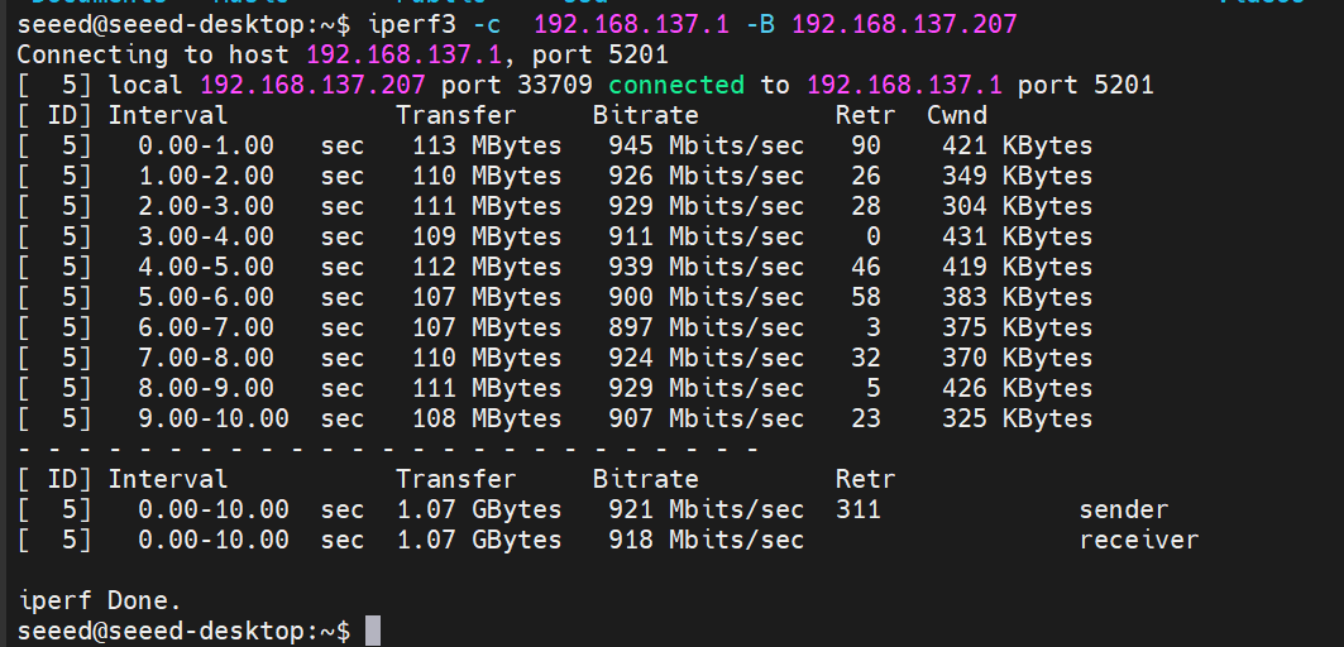
要测试以太网端口速度,请按如下方式使用 iperf3:
iperf3 -c <server_ip> -B <bind_ip>
<server_ip> 是 iperf3 服务器的 IP 地址。客户端将连接到此服务器以执行带宽测试。
<bind_ip> 将指定的本地 IP 地址绑定为测试流量的源地址。
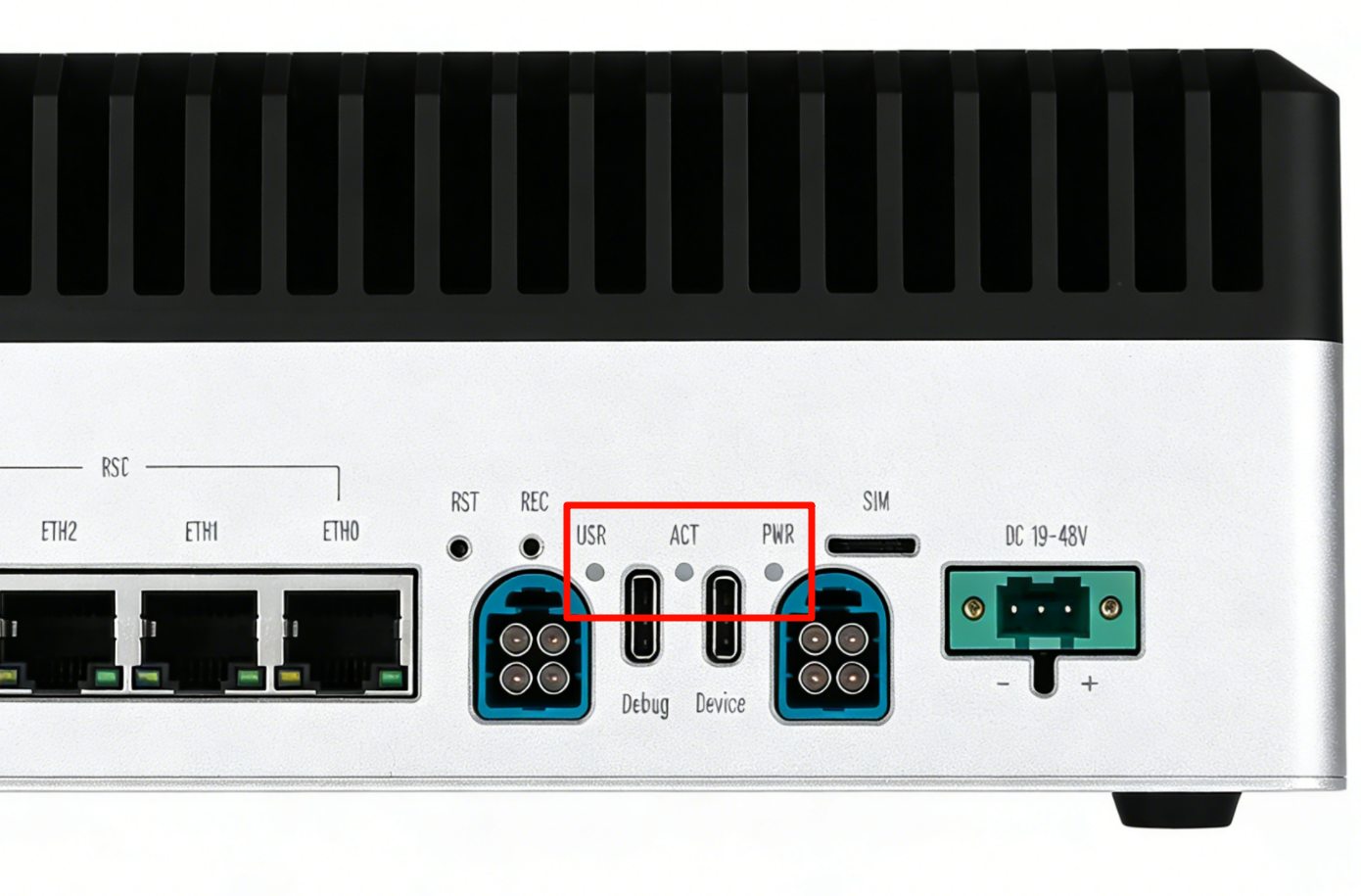
LED
J501 配备了多个状态 LED:
- PWR LED: 电源状态(绿色)
- ACT LED: 系统活动(黄色)
- USR LED: 通过 GPIO 控制
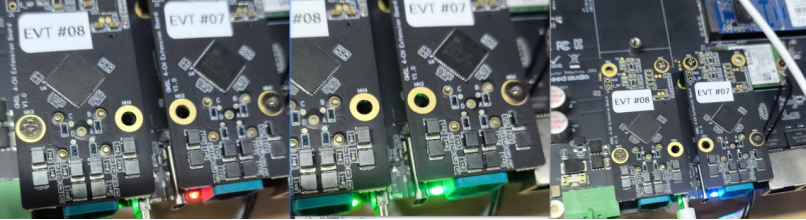
使用说明
下面演示如何控制 USER LED 显示为绿色、红色或蓝色。
#change to red
echo 1 | sudo tee /sys/class/leds/on-board:red/brightness
echo 0 | sudo tee /sys/class/leds/on-board:red/brightness
#change to green
echo 1 | sudo tee /sys/class/leds/on-board:green/brightness
echo 0 | sudo tee /sys/class/leds/on-board:green/brightness
#change to blue
echo 1 | sudo tee /sys/class/leds/on-board:blue/brightness
echo 0 | sudo tee /sys/class/leds/on-board:blue/brightness
LED 控制效果如下图所示:
USB
Robotics J501 提供 4 个 USB 3.2 Type-A 接口(通过内部 USB 3.1 Gen1 集线器,实现最高 5Gbps 数据速率,可连接高速外设、存储设备或相机)以及 1 个 USB 2.0 Type-C 调试接口(作为串口控制台,用于访问系统日志、调试启动问题和执行固件更新)。
USB-A 速度测试
创建脚本以测试 USB 设备速度:
vim test_usb.sh
粘贴以下内容:
test_usb.sh
cat <<'EOF' | sudo tee test_usb.sh >/dev/null
#!/bin/bash
set -e
MOUNT_POINT="$1"
TEST_FILE="$MOUNT_POINT/test_usb_speed.bin"
if [ -z "$MOUNT_POINT" ]; then
echo "Usage: $0 <mount_point>"
echo "Example: $0 /media/seeed/USB"
exit 1
fi
if [ ! -d "$MOUNT_POINT" ]; then
echo "Error: $MOUNT_POINT is not a directory"
exit 1
fi
echo "Write test..."
dd if=/dev/zero of="$TEST_FILE" bs=1M count=2048 conv=fdatasync status=progress
echo
echo "Drop caches..."
sync
echo 3 | sudo tee /proc/sys/vm/drop_caches >/dev/null
echo "Read test..."
dd if="$TEST_FILE" of=/dev/null bs=1M count=2048 status=progress
echo
echo "Cleaning up..."
rm -f "$TEST_FILE"
EOF
使脚本可执行并进行测试:
sudo chmod +x test_usb.sh
./test_usb.sh /mnt # If your USB drive is mounted at /mnt
# Or
./test_usb.sh /media/usb # If your USB drive is mounted at /media/usb
# Or
./test_usb.sh /path/to/your/usb/mount_point

请先使用 df -h 或 lsblk 命令确认 USB 设备的实际挂载点!
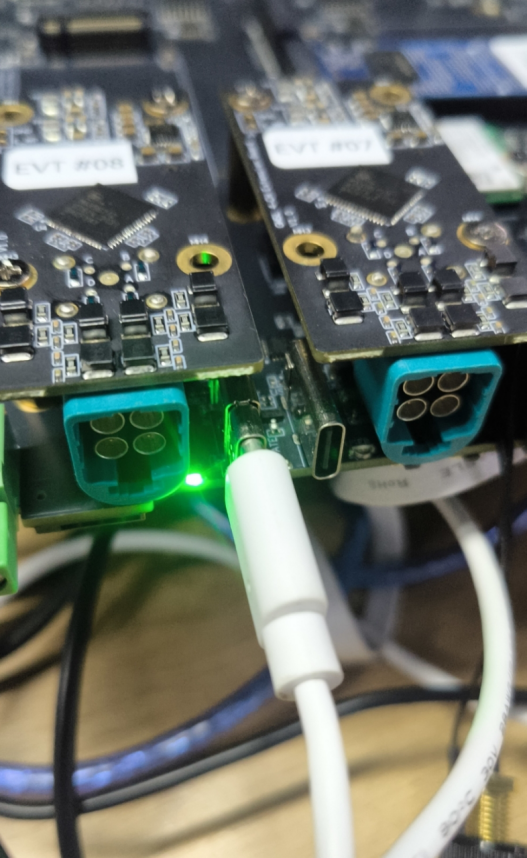
USB 2.0 Type-C 接口
通过此串口,使用 USB-C 数据线,可以在 PC 端监控输入和输出的调试信息。
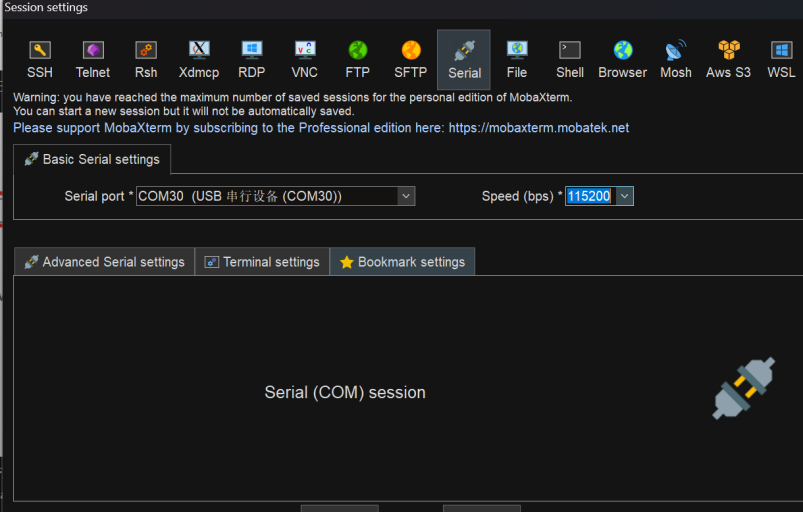
步骤 1. 打开串口工具(此处以 MobaXterm 工具为例),创建一个新会话。

步骤 2. 选择 Serial 工具。

步骤 3. 选择对应的串口,将波特率设置为 115200 并点击 "OK"。
步骤 4. 使用用户名和密码登录你的 reComputer Super。
风扇
Robotics J501 提供两个 4 针 PWM 风扇接口,用于为 Jetson 模组和载板元件散热:
- 12V 风扇:2.54 mm 接口,最大 1.5A,适用于高性能散热
- 5V 风扇:1.25 mm JST 接口,最大 1.5A,适用于低功耗静音散热
通过 PWM 控制,可以根据系统温度动态、精确地调节转速,在保证高效散热的同时,将噪声和功耗降到最低。
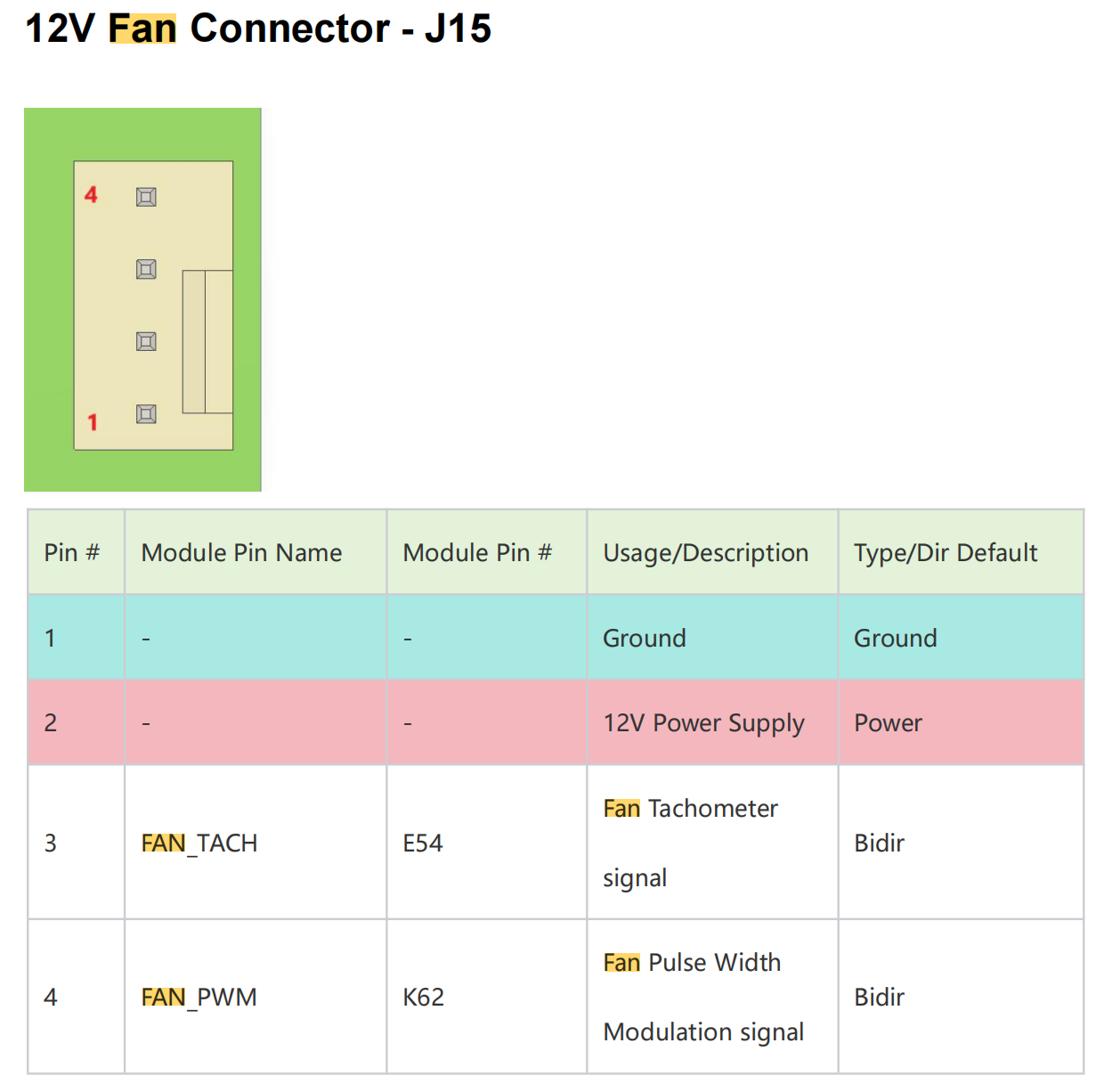
12V 风扇引脚定义:
12V 风扇接口(2.54 mm)的引脚定义如下:
使用说明
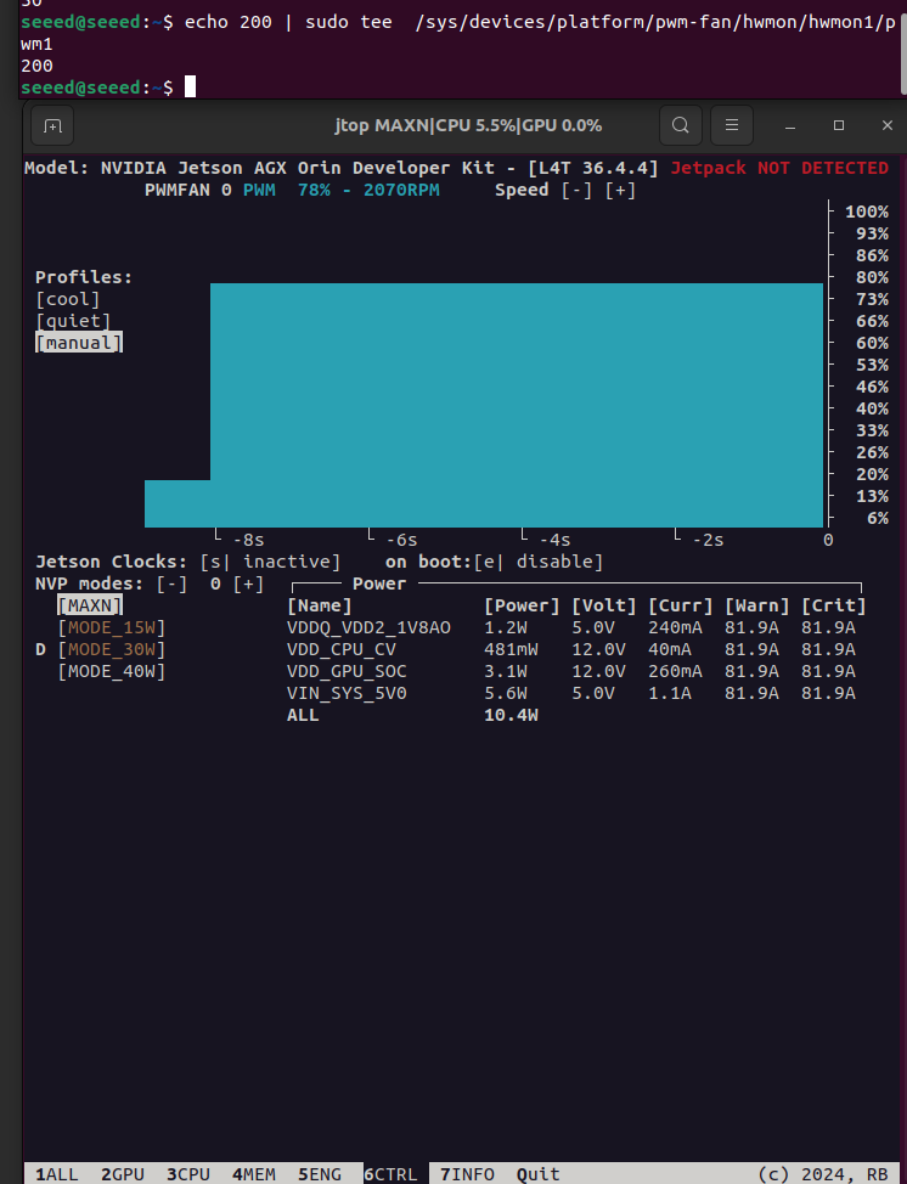
手动 PWM 控制:
# Set fan speed (0-255)
sudo -i
echo 200 > /sys/bus/platform/devices/pwm-fan/hwmon/hwmon1/pwm1
默认散热策略已在 /etc/nvpmodel.conf 中预配置。若需自定义配置文件,请参考 NVIDIA Jetson Linux Developer Guide。
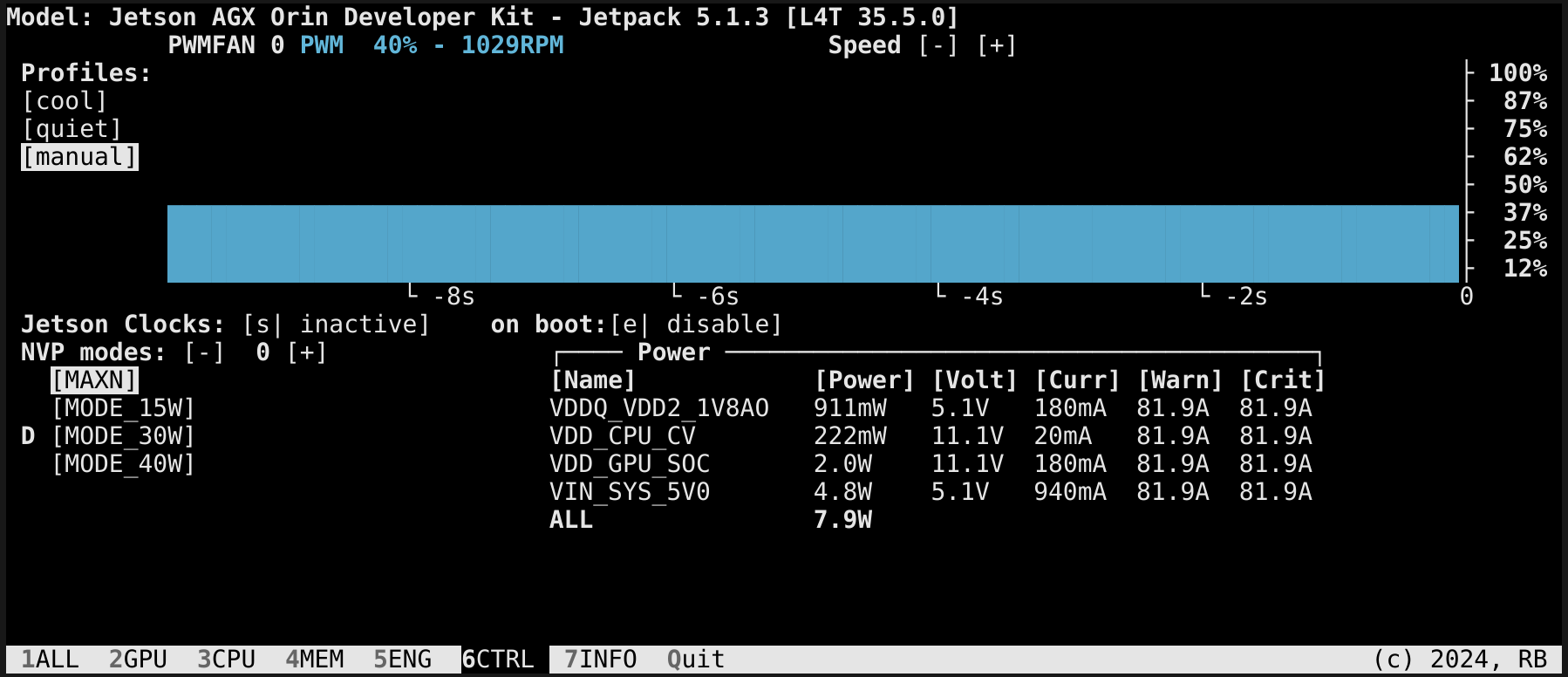
此外,我们可以使用 jtop 工具手动设置风扇转速。
你可以在终端输入以下命令来安装 jtop。
sudo apt update
sudo apt install python3-pip -y
sudo pip3 install jetson-stats
然后重启你的 reComputer Mini:
sudo reboot
安装 jtop 后,你可以在终端中启动它:
jtop
CAN
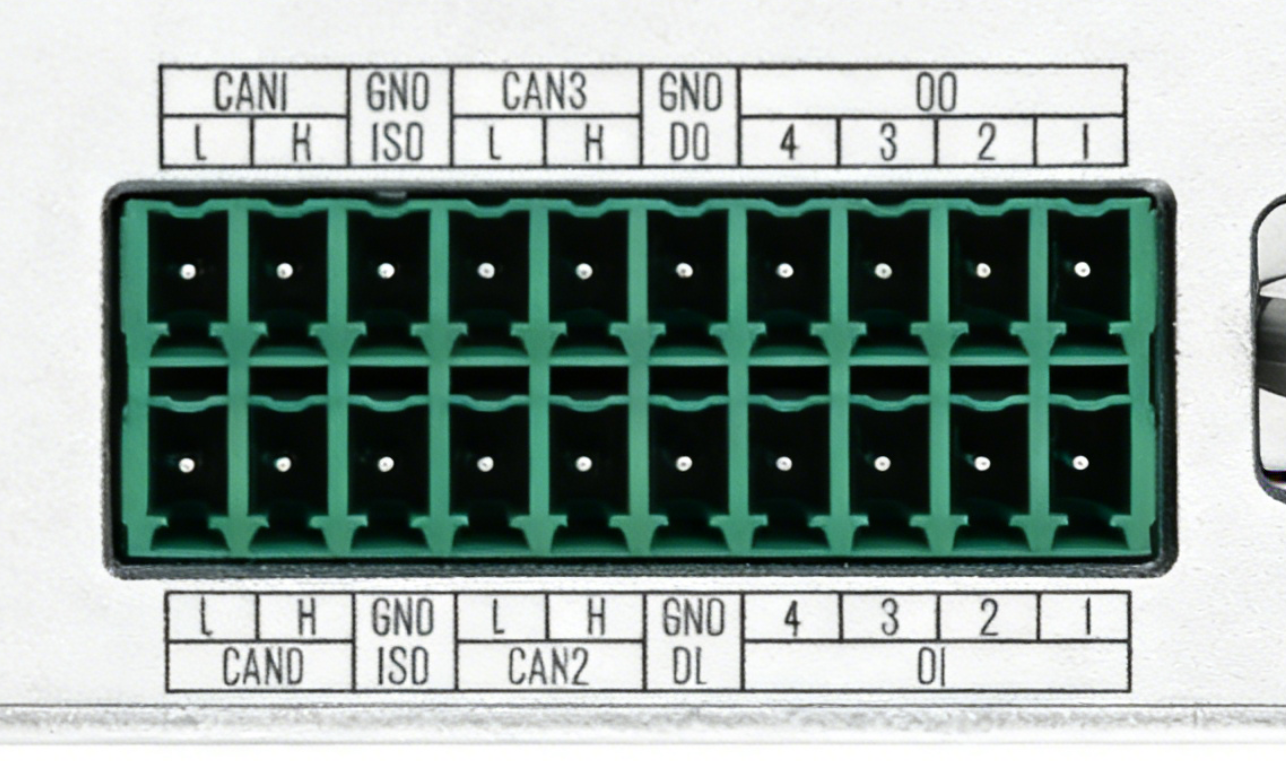
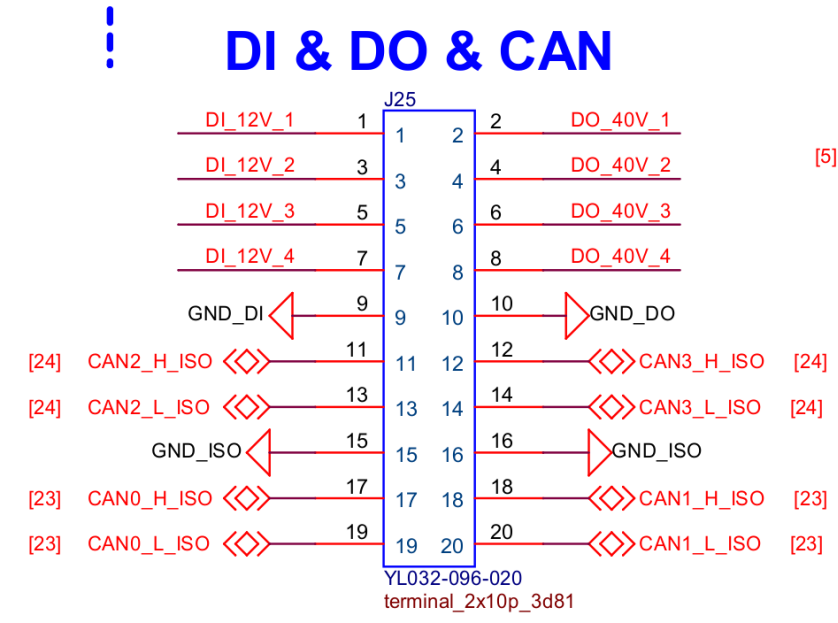
reComputer Robotics J501 配备了 4 个独立的 CAN 接口(CAN 0、CAN 1、CAN 2、CAN 3),与 DI/DO 接口共用 J25 2x10P 连接器。这些接口支持 Classic CAN 和 CAN FD 通信协议,具有较强的抗干扰性能和实时数据传输能力,适用于车载电子、工业自动化和机器人等工业控制场景。
使用说明
这是 CAN 接口的原理图。
CAN 通信
本节演示在 Jetson 上连接 CAN0↔CAN1 和 CAN2↔CAN3,并展示如何在 Classic CAN 模式和 CAN‑FD 模式下在这两对接口之间进行数据收发。
| 通道名称 | 接口类型 | 引脚名称 | GPIO 芯片 | GPIO 编号 | 终端电阻控制 |
|---|---|---|---|---|---|
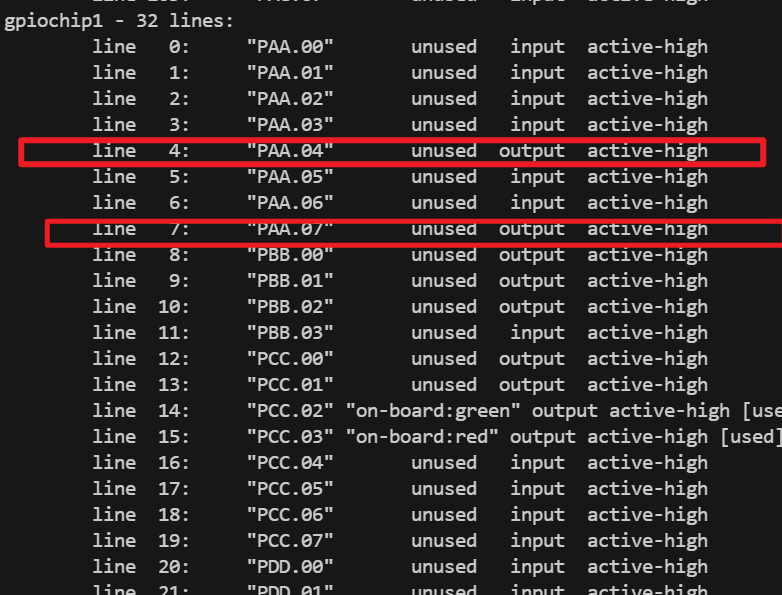
| CAN0 | 原生 | PAA.04 | gpiochip1 | 4 | gpiochip1 line4 (PAA.04) |
| CAN1 | 原生 | PAA.07 | gpiochip1 | 7 | gpiochip1 line7 (PAA.07) |
| CAN2 | SPI-to-CAN | - | gpiochip2 | 10 | gpiochip2 line10 |
| CAN3 | SPI-to-CAN | - | gpiochip2 | 12 | gpiochip2 line12 |
CAN0 和 CAN1 的终端电阻可以通过两个引脚进行控制:PAA.04(位于 gpiochip1 line4)和 PAA.07(位于 gpiochip1 line7)。
终端电阻控制遵循以下规则:
When `PAA.04 = 1`, the 120 Ω termination resistor of CAN0 is **disconnected**;
when `PAA.04 = 0`, the 120 Ω termination resistor of CAN0 is **connected**.
When `PAA.07 = 1`, the 120 Ω termination resistor of CAN1 is **disconnected**;
when `PAA.07 = 0`, the 120 Ω termination resistor of CAN1 is **connected**.
输入以下命令以查看 gpiochip 1 上的引脚:
gpioinfo gpiochip1
参考以下命令将 PAA.04 和 PAA.07 设为 0:
sudo gpioset --mode=wait gpiochip1 4=0
sudo gpioset --mode=wait gpiochip1 7=0
参考以下命令将 PAA.04 和 PAA.07 设为 1:
sudo gpioset --mode=wait gpiochip1 4=1
sudo gpioset --mode=wait gpiochip1 7=1
Classic CAN 模式
以下脚本实现 CAN0/CAN1 和 CAN2/CAN3 之间的回环通信测试,包括使能终端电阻、配置比特率以及双向数据传输。
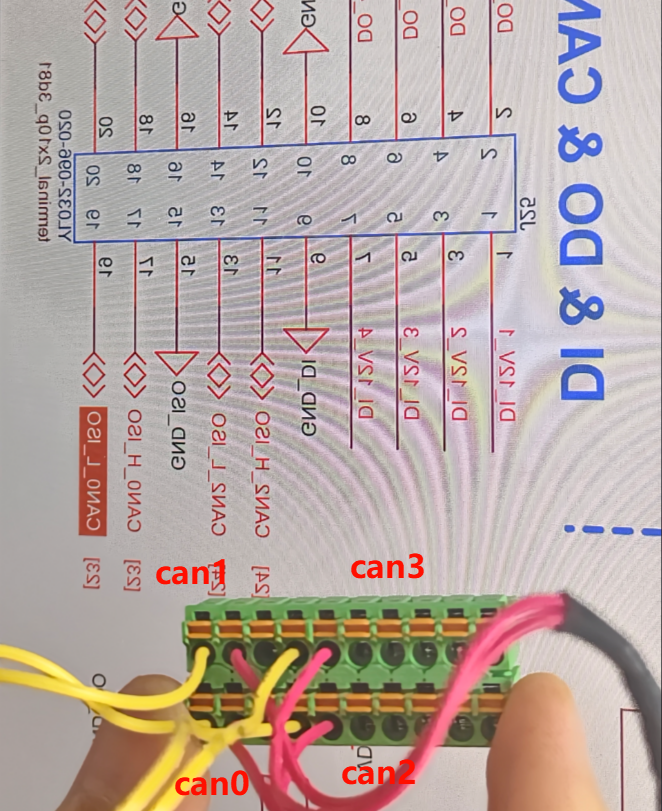
接线图如下所示:
| From | To |
|---|---|
| CAN0_H | CAN1_H |
| CAN0_L | CAN1_L |
| CAN2_H | CAN3_H |
| CAN2_L | CAN3_L |
接线图如下所示:

创建 test_can.sh,用于在标准模式下测试 CAN0↔CAN1 和 CAN2↔CAN3 之间的数据收发:
touch test_can.sh
sudo chmod +x test_can.sh
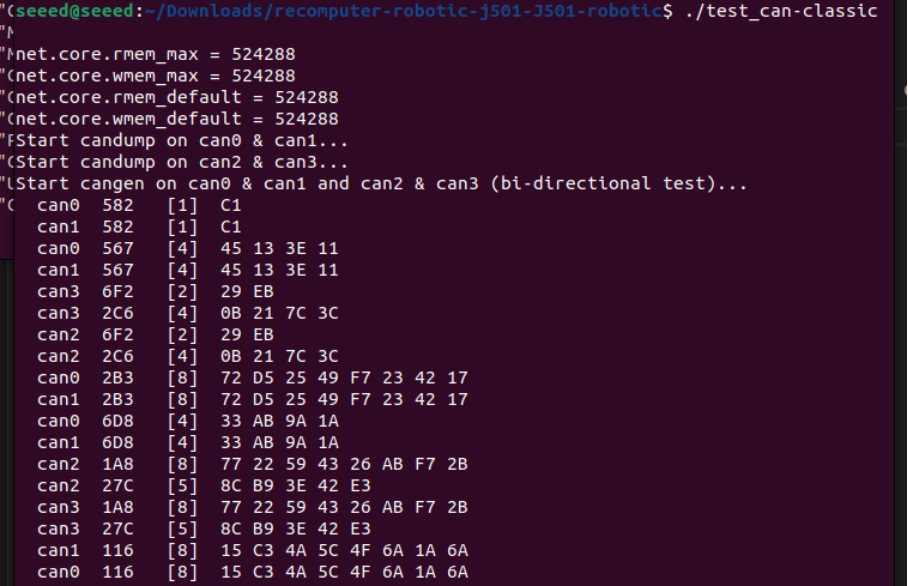
sudo ./test_can.sh
test_can.sh 的脚本代码如下:
test_can.sh
#!/bin/bash
set -e
PW="000000"
echo "$PW" | sudo -S ip link set can0 down || true
echo "$PW" | sudo -S ip link set can1 down || true
echo "$PW" | sudo -S ip link set can2 down || true
echo "$PW" | sudo -S ip link set can3 down || true
# Set socket buffer sizes
echo "$PW" | sudo -S sysctl -w net.core.rmem_max=524288
echo "$PW" | sudo -S sysctl -w net.core.wmem_max=524288
echo "$PW" | sudo -S sysctl -w net.core.rmem_default=524288
echo "$PW" | sudo -S sysctl -w net.core.wmem_default=524288
# Set bitrate, 1 Mbps
BITRATE=1000000
echo "$PW" | sudo -S ip link set can0 type can bitrate ${BITRATE}
echo "$PW" | sudo -S ip link set can1 type can bitrate ${BITRATE}
echo "$PW" | sudo -S ip link set can0 up
echo "$PW" | sudo -S ip link set can1 up
echo "$PW" | sudo -S ip link set can2 type can bitrate ${BITRATE}
echo "$PW" | sudo -S ip link set can3 type can bitrate ${BITRATE}
echo "$PW" | sudo -S ip link set can2 up
echo "$PW" | sudo -S ip link set can3 up
sleep 1
# Enable termination resistors
sudo pkill -f gpioset || true
gpioset --mode=time --sec=200000 gpiochip2 8=0 & # enable CAN1 120R
GPIO1_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 9=0 & # enable CAN0 120R
GPIO2_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 12=0 & # enable CAN3 120R
GPIO3_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 10=0 & # enable CAN2 120R
GPIO4_PID=$!
echo "Start candump on can0 & can1..."
candump can0 &
DUMP0_PID=$!
candump can1 &
DUMP1_PID=$!
echo "Start candump on can2 & can3..."
candump can2 &
DUMP2_PID=$!
candump can3 &
DUMP3_PID=$!
echo "Start cangen on can0 & can1 and can2 & can3 (bi-directional test)..."
# -g 10 sends one frame every 10 ms; adjust as needed
cangen can0 -g 10 &
GEN0_PID=$!
cangen can1 -g 10 &
GEN1_PID=$!
cangen can2 -g 10 &
GEN2_PID=$!
cangen can3 -g 10 &
GEN3_PID=$!
# Cleanup background processes on Ctrl+C
cleanup() {
echo
echo "Stopping CAN test..."
kill $GEN0_PID $GEN1_PID $DUMP0_PID $DUMP1_PID $GPIO1_PID $GPIO2_PID 2>/dev/null || true
kill $GEN2_PID $GEN3_PID $DUMP2_PID $DUMP3_PID $GPIO3_PID $GPIO4_PID 2>/dev/null || true
echo "$PW" | sudo -S ip link set can0 down || true
echo "$PW" | sudo -S ip link set can1 down || true
echo "$PW" | sudo -S ip link set can2 down || true
echo "$PW" | sudo -S ip link set can3 down || true
echo "Done."
}
trap cleanup INT TERM
# Wait for child processes (candump runs until you Ctrl+C)
wait
在 CAN 测试脚本中,将 PW 替换为你自己的 Jetson 密码。
CAN0 和 CAN1 之间的数据收发将被完成:
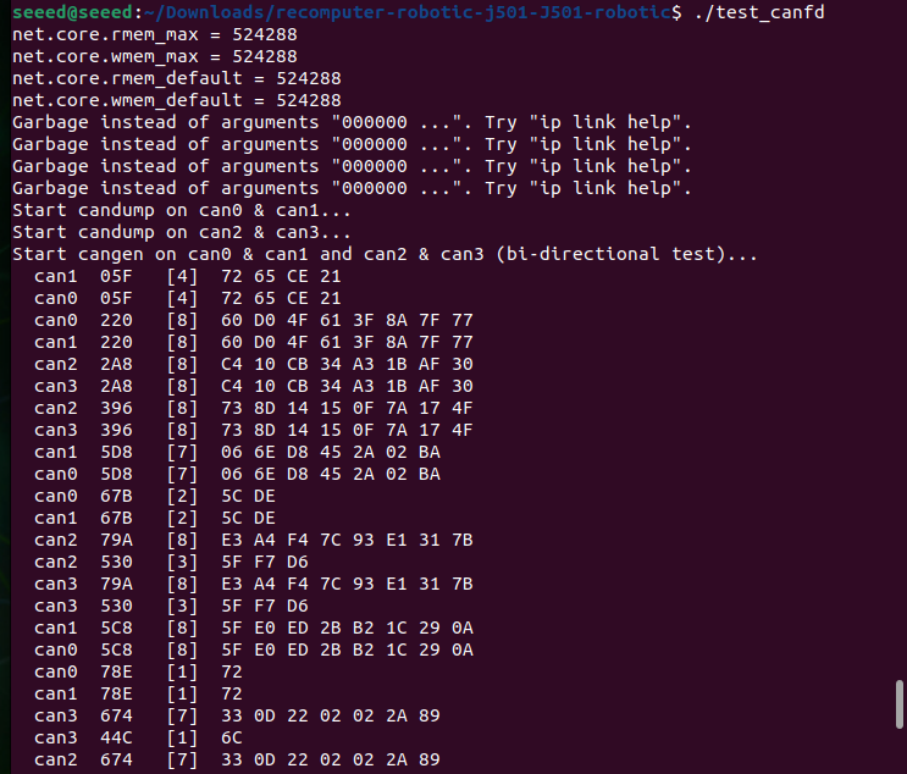
CAN-FD 模式
CAN FD 支持更高的数据传输速率和更大的数据帧长度。以下脚本实现 CAN FD 回环测试。
创建 test_canfd.sh,在 CAN-FD 模式下测试 CAN0↔CAN1 和 CAN2↔CAN3 之间的数据收发:
touch test_canfd.sh
sudo chmod +x test_canfd.sh
sudo ./test_canfd.sh
test_canfd.sh 的脚本代码如下:
test_canfd.sh
#!/bin/bash
set -e
PW="000000"
echo "$PW" | sudo -S ip link set can0 down || true
echo "$PW" | sudo -S ip link set can1 down || true
echo "$PW" | sudo -S ip link set can2 down || true
echo "$PW" | sudo -S ip link set can3 down || true
# Set socket buffers
echo "$PW" | sudo -S sysctl -w net.core.rmem_max=524288
echo "$PW" | sudo -S sysctl -w net.core.wmem_max=524288
echo "$PW" | sudo -S sysctl -w net.core.rmem_default=524288
echo "$PW" | sudo -S sysctl -w net.core.wmem_default=524288
# ---- CAN-FD parameters ----
BITRATE=500000 # Arbitration (nominal) bitrate
DBITRATE=5000000 # Data phase bitrate (FD fast mode)
# Configure CAN-FD: arbitration bitrate + data bitrate + FD on + error reporting + auto restart
echo "$PW" | sudo -S ip link set can0 type can bitrate $BITRATE dbitrate $DBITRATE fd on berr-reporting on restart-ms 100
echo "$PW" | sudo -S ip link set can1 type can bitrate $BITRATE dbitrate $DBITRATE fd on berr-reporting on restart-ms 100
echo "$PW" | sudo -S ip link set can2 type can bitrate $BITRATE dbitrate $DBITRATE fd on berr-reporting on restart-ms 100
echo "$PW" | sudo -S ip link set can3 type can bitrate $BITRATE dbitrate $DBITRATE fd on berr-reporting on restart-ms 100
echo "$PW" | sudo -S ip link set can0 up
echo "$PW" | sudo -S ip link set can1 up
echo "$PW" | sudo -S ip link set can2 up
echo "$PW" | sudo -S ip link set can3 up
sleep 1
# Enable termination resistors
sudo pkill -f gpioset || true
gpioset --mode=time --sec=200000 gpiochip2 8=0 & # enable CAN1 120R
GPIO1_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 9=0 & # enable CAN0 120R
GPIO2_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 12=0 & # enable CAN3 120R
GPIO3_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 10=0 & # enable CAN2 120R
GPIO4_PID=$!
echo "Start candump on can0 & can1..."
candump can0 &
DUMP0_PID=$!
candump can1 &
DUMP1_PID=$!
echo "Start candump on can2 & can3..."
candump can2 &
DUMP2_PID=$!
candump can3 &
DUMP3_PID=$!
echo "Start cangen on can0 & can1 and can2 & can3 (bi-directional test)..."
# -g 10 sends one frame every 10 ms; adjust as needed
cangen can0 -g 10 &
GEN0_PID=$!
cangen can1 -g 10 &
GEN1_PID=$!
cangen can2 -g 10 &
GEN2_PID=$!
cangen can3 -g 10 &
GEN3_PID=$!
# Cleanup background processes on Ctrl+C
cleanup() {
echo
echo "Stopping CAN-FD test..."
kill $GEN0_PID $GEN1_PID $DUMP0_PID $DUMP1_PID $GPIO1_PID $GPIO2_PID 2>/dev/null || true
kill $GEN2_PID $GEN3_PID $DUMP2_PID $DUMP3_PID $GPIO3_PID $GPIO4_PID 2>/dev/null || true
echo "$PW" | sudo -S ip link set can0 down || true
echo "$PW" | sudo -S ip link set can1 down || true
echo "$PW" | sudo -S ip link set can2 down || true
echo "$PW" | sudo -S ip link set can3 down || true
echo "Done."
}
trap cleanup INT TERM
# Wait for child processes (candump will run until you Ctrl+C)
wait
在 CAN 测试脚本中,将 PW 替换为你自己的 Jetson 密码。
CAN0↔CAN1 和 CAN2↔CAN3 之间的数据收发将被完成:
DI/DO
reComputer Robotics J501 的 DI/DO 接口集成在 J25 2x10P 连接器上,与 CAN 接口共用接口。它们支持 4 路数字输入和 4 路数字输出,具有稳定的信号传输和工业级电压适配能力,适用于连接数字传感器、继电器等外设设备。
硬件连接
数字输入(DI)通道
| 通道名称 | 电压特性 | GPIO 标号 | 引脚名称 | GPIO 芯片 | GPIO 编号 |
|---|---|---|---|---|---|
| DI_12V_1 | 12V 输入自适应 | DI_1_GPIO17 | PP.04 | gpiochip0 | 96 |
| DI_12V_2 | 12V 输入自适应 | DI_1_GPIO18 | PQ.04 | gpiochip0 | 104 |
| DI_12V_3 | 12V 输入自适应 | DI_1_GPIO19 | PN.02 | gpiochip0 | 86 |
| DI_12V_4 | 12V 输入自适应 | DI_1_GPIO33 | PM.07 | gpiochip0 | 83 |
数字输出(DO)通道
| 通道名称 | 电压特性 | GPIO 标号 | 引脚名称 | GPIO 芯片 | GPIO 编号 | 其他信息 |
|---|---|---|---|---|---|---|
| DO_40V_1 | 开漏输出;未上拉时约 0V(低电平),上拉时为 12V(高电平) | DO_1_GPIO | PAA.04 | gpiochip1 | 4 | 对应编号:320 |
| DO_40V_2 | 开漏输出;未上拉时约 0V(低电平),上拉时为 12V(高电平) | DO_2_GPIO | PAA.07 | gpiochip1 | 7 | 对应编号:323 |
| DO_40V_3 | 开漏输出;未上拉时约 0V(低电平),上拉时为 12V(高电平) | DO_3_GPIO | PBB.01 | gpiochip1 | 9 | 对应编号:325 |
| DO_40V_4 | 开漏输出;未上拉时约 0V(低电平),上拉时为 12V(高电平) | DO_4_GPIO | PBB.00 | gpiochip1 | 8 | 对应编号:324 |
J25 连接器上 DI/DO 接口的关键引脚定义如下(引脚编号对应物理连接器):
| 引脚编号 | 功能标号 | 描述 |
|---|---|---|
| 1 | DI_12V_1 | 12V 数字输入通道 1 |
| 3 | DI_12V_2 | 12V 数字输入通道 2 |
| 5 | DI_12V_3 | 12V 数字输入通道 3 |
| 7 | DI_12V_4 | 12V 数字输入通道 4 |
| 9 | GND_DI | 数字输入通道地 |
| 2 | DO_40V_1 | 40V 数字输出通道 1 |
| 4 | DO_40V_2 | 40V 数字输出通道 2 |
| 6 | DO_40V_3 | 40V 数字输出通道 3 |
| 8 | DO_40V_4 | 40V 数字输出通道 4 |
| 10 | GND_DO | 数字输出通道地 |
如需完整引脚定义(包括 CAN 接口),请参考 reComputer Robotics J501 的硬件文档,以避免错误连接。
使用说明
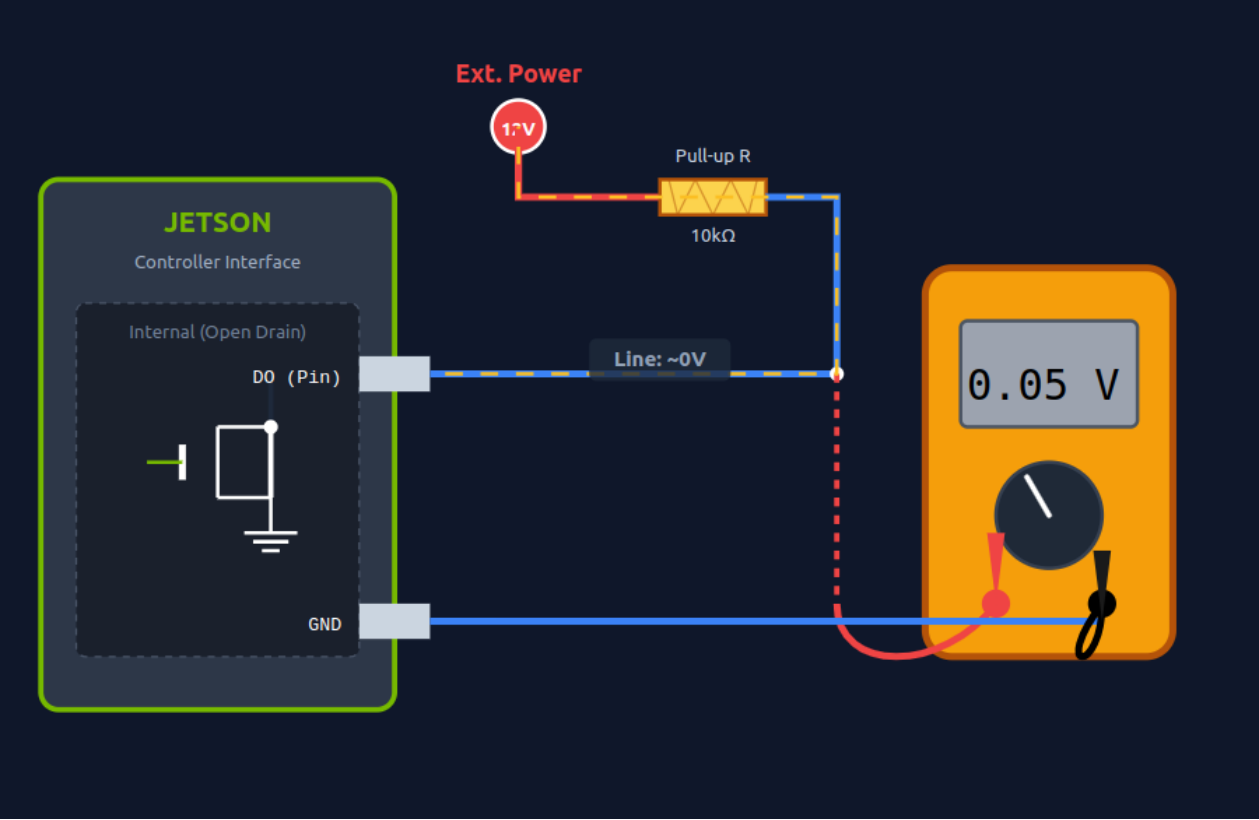
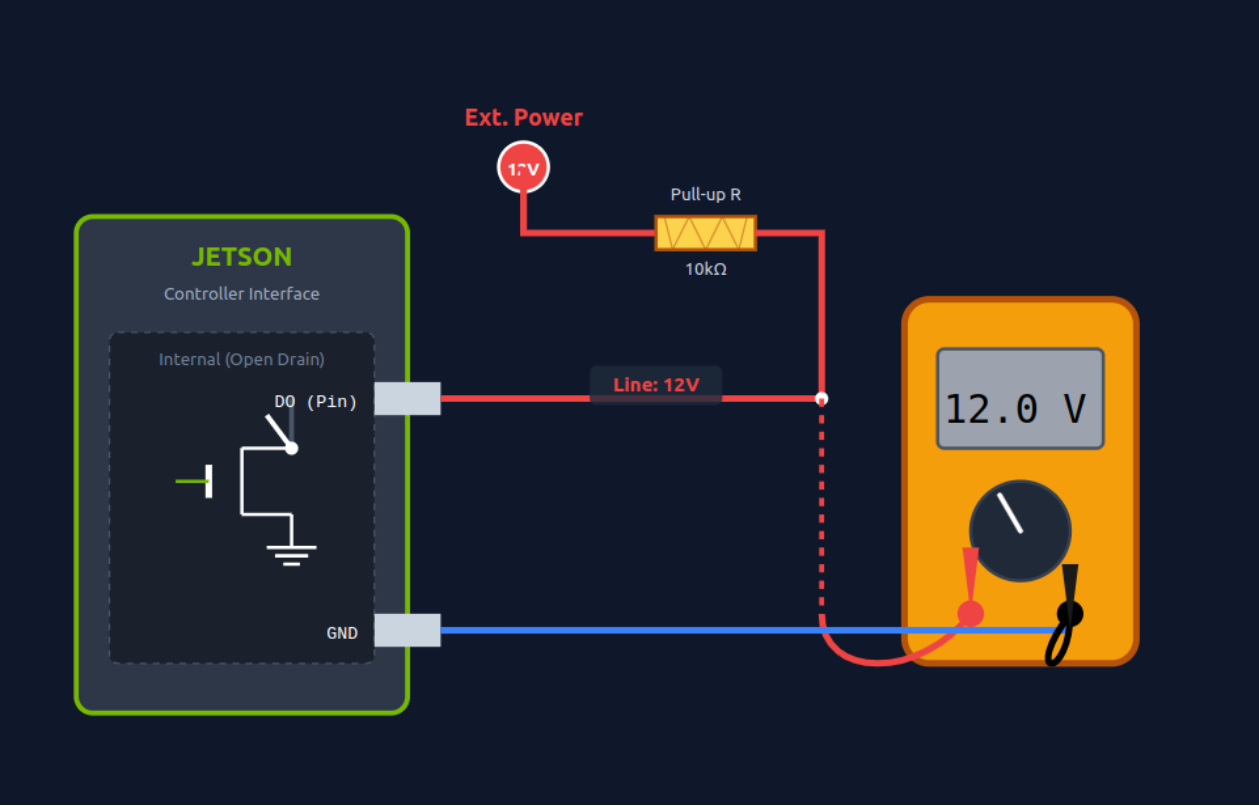
数字输出(DO)操作
DO 接口采用开漏输出。你可以通过命令设置输出电平(高/低),以控制继电器、LED 等外设。
运行以下命令以使能 DO 通道(输出 12V,由外部上拉电阻和 12V 电源供电):
# Enable DO_40V_1 (gpiochip1 4)
sudo gpioset --mode=wait 1 4=1
# Enable DO_40V_2 (gpiochip1 7)
sudo gpioset --mode=wait 1 7=1
# Enable DO_40V_3 (gpiochip1 9)
sudo gpioset --mode=wait 1 9=1
# Enable DO_40V_4 (gpiochip1 8)
sudo gpioset --mode=wait 1 8=1
DO 上拉前:
DO 上拉后:
运行以下命令以关闭 DO 通道(输出约 0V):
# Disable DO_40V_1 (gpiochip1 4)
sudo gpioset --mode=wait 1 4=0
# Disable DO_40V_2 (gpiochip1 7)
sudo gpioset --mode=wait 1 7=0
# Disable DO_40V_3 (gpiochip1 9)
sudo gpioset --mode=wait 1 9=0
# Disable DO_40V_4 (gpiochip1 8)
sudo gpioset --mode=wait 1 8=0
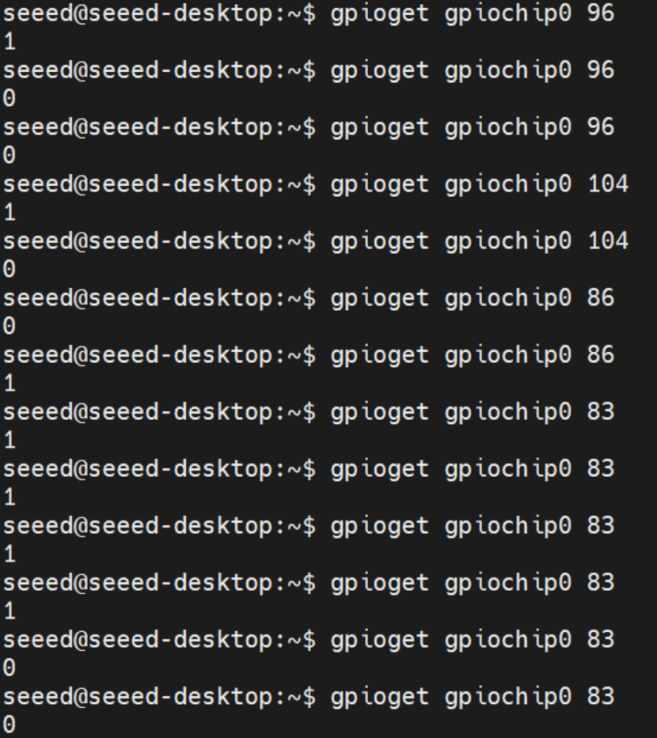
数字输入(DI)操作
使用 gpioget 命令读取 DI 通道的输入电平(返回值 1 = 高电平,0 = 低电平),以获取外设设备的状态。
读取 DI 通道电平的命令如下:
# Read DI_12V_1 (gpiochip0 96) status
gpioget gpiochip0 96
# Read DI_12V_2 (gpiochip0 104) status
gpioget gpiochip0 104
# Read DI_12V_3 (gpiochip0 86) status
gpioget gpiochip0 86
# Read DI_12V_4 (gpiochip0 83) status
gpioget gpiochip0 83
SPI
硬件连接
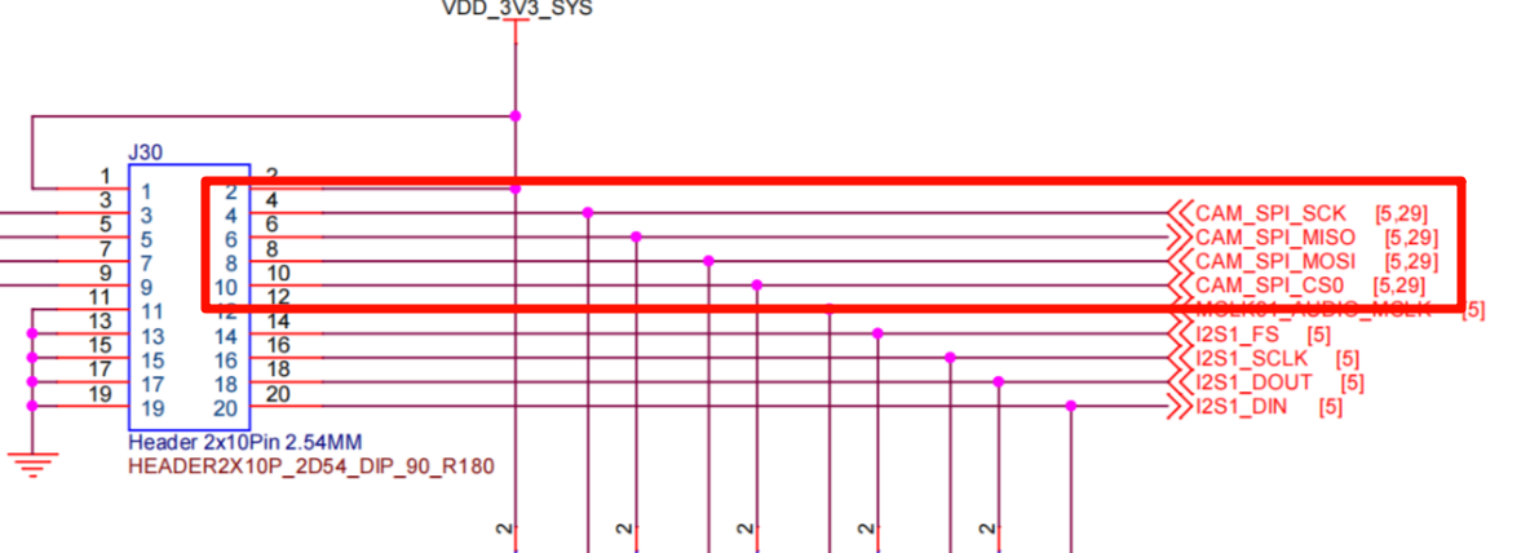
使用说明
使用杜邦线连接目标 SPI 通道的核心引脚(以 /dev/spidev2.0 为例): 将 SPI2.0 的 MOSI 引脚连接到其 MISO 引脚(实现数据回环收发)。
接线示意图如下:
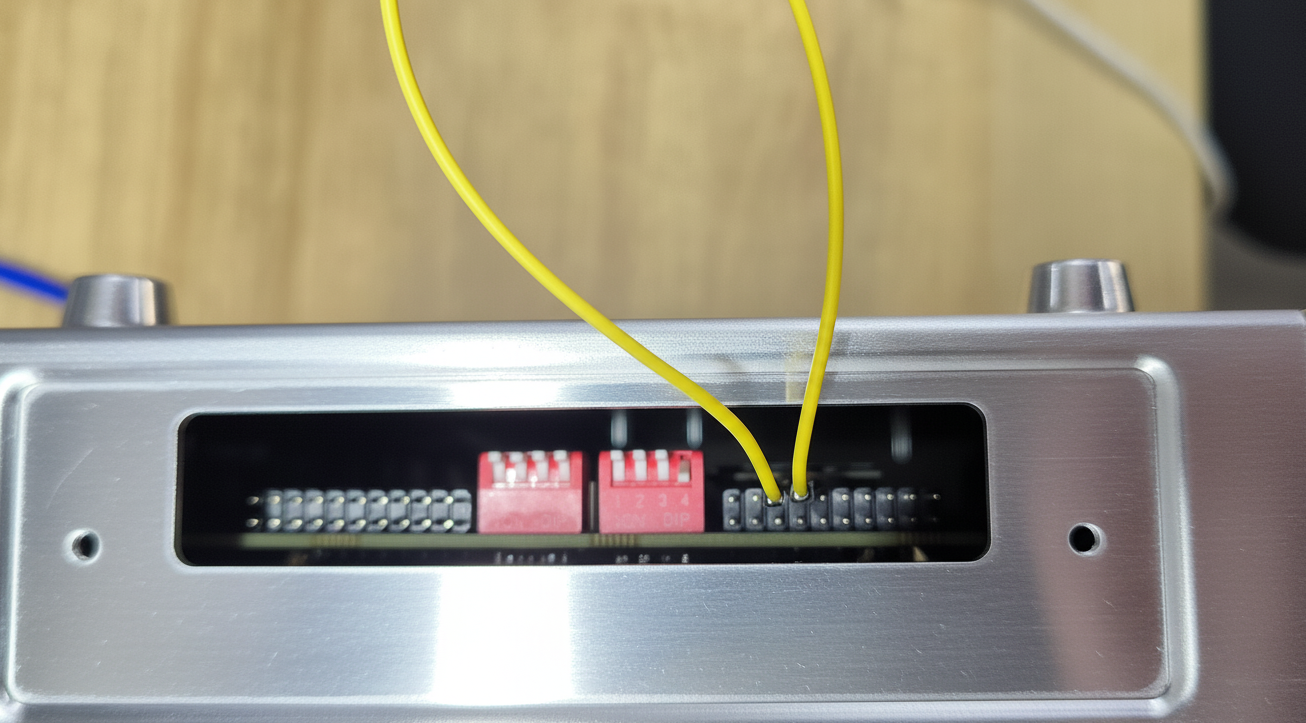
要使用 SPI,请按上图所示使用螺丝刀拆下设备侧盖。
步骤 1:加载 SPI 内核模块(前置条件)
在操作 SPI 接口之前,确保已加载 spidev 内核模块(默认系统可能已预加载,但建议手动确认):
sudo modprobe spidev
如果命令执行后没有错误提示,表示模块加载成功;如果模块已加载,该命令不会返回任何信息,这是正常现象。
步骤 2:查看 SPI 设备节点 在终端中输入以下命令,以查看 reComputer Robotics J501 的 SPI 接口所映射的设备名称:
ls /dev/spidev*
如果没有显示设备节点,说明 spidev 模块未成功加载。请重新运行 sudo modprobe spidev,并检查系统日志进行故障排查。
步骤 3:获取并编译 SPI 测试代码
从 GitHub 拉取 spidev-test 测试代码并进行编译:
git clone https://github.com/rm-hull/spidev-test
cd spidev-test
gcc spidev_test.c -o spidev_test
步骤 4:运行 SPI 测试程序
在终端中输入以下命令来运行 SPI 测试程序(以 /dev/spidev2.0 为例):
sudo ./spidev_test -v -D /dev/spidev2.0 -s 100000
步骤 5:验证测试结果 运行测试命令后,可以在终端中观察 SPI2.0 接口的数据收发情况。核心输出如下:
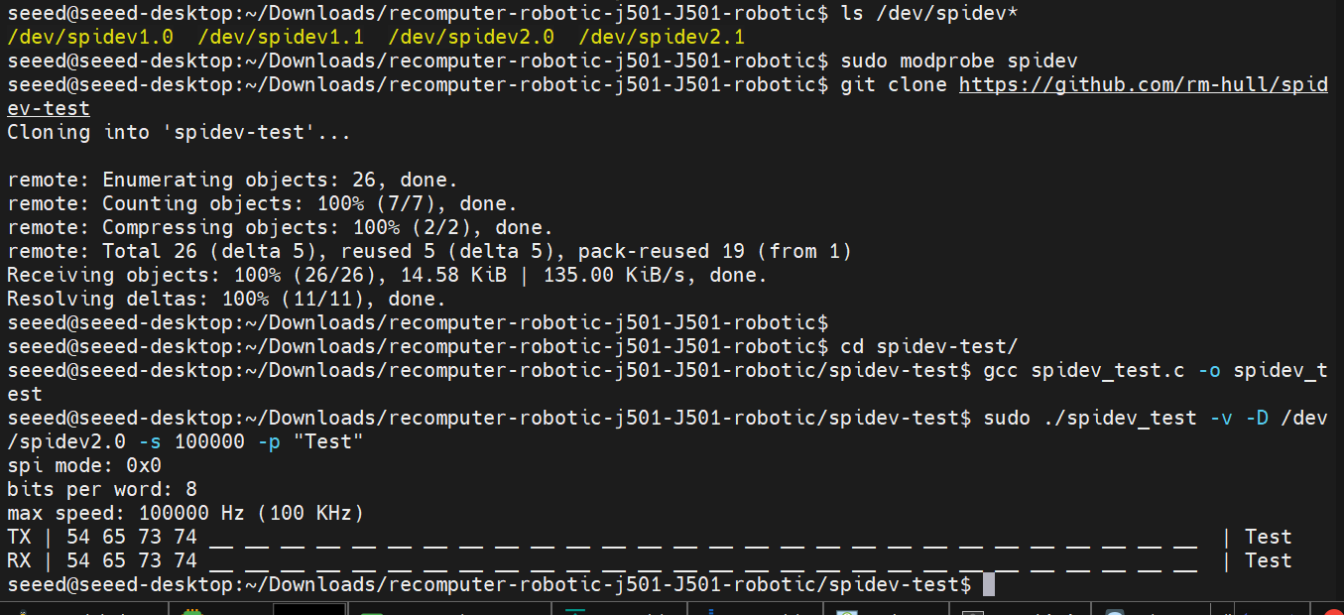
关键判断标准:TX(发送)数据与 RX(接收)数据一致,表示 SPI 回环测试成功,SPI 接口功能正常。
UART
reComputer Robotics J501 配备了 2 个独立的 UART 接口(UART1 和 UART2),支持 RS232、RS422 和 RS485 通信模式,具有信号传输稳定、与外设设备兼容性强等特点。
硬件连接
UART 接口通道
| 通道名称 | 设备节点 | 支持模式 | 默认波特率 | GPIO 使能命令 | 模式切换方式 |
|---|---|---|---|---|---|
| UART1 (DB9-1) | /dev/ttyTHS1 | RS232, RS422, RS485 | RS232:115200 bps;RS422/RS485:9600 bps | gpioset --mode=wait gpiochip0 2=0 | SW3 拨码开关(8 位 DIP) |
| UART2 (DB9-2) | /dev/ttyTHS4 | RS232(默认) | 115200 bps | gpioset --mode=wait gpiochip2 15=0 | 固定 RS232(不可切换) |
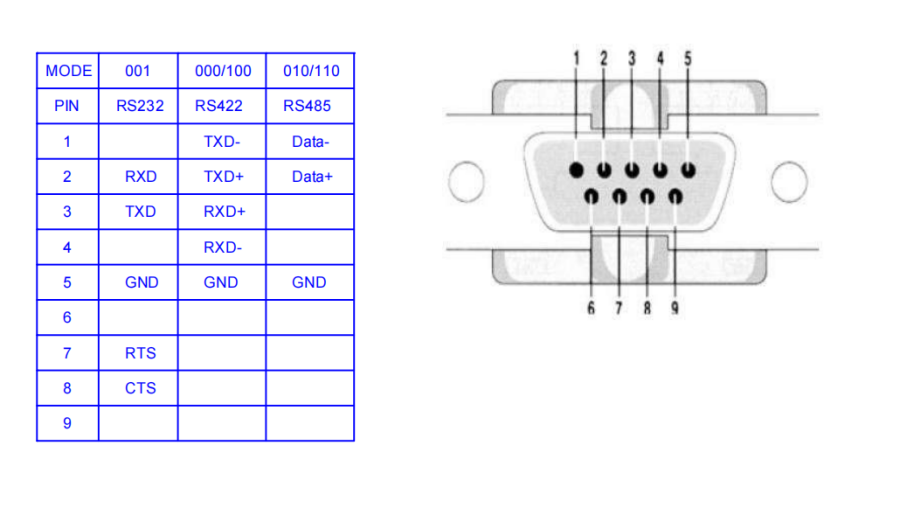
引脚定义(DB9 接口)
每个 DB9 引脚的功能会随通信模式而变化。请参考下表进行准确接线(引脚编号遵循标准 DB9 公头接口规范):
| DB9 引脚号 | RS232 模式功能 | RS422 模式功能 | RS485 模式功能 |
|---|---|---|---|
| 1 | - | TXD-(发送数据-) | Data-(差分数据-) |
| 2 | RXD(接收数据) | TXD+(发送数据+) | Data+(差分数据+) |
| 3 | TXD(发送数据) | RXD+(接收数据+) | - |
| 4 | - | RXD-(接收数据-) | - |
| 5 | GND(地) | GND(地) | GND(地) |
| 6 | - | - | - |
| 7 | RTS(请求发送) | - | - |
| 8 | CTS(允许发送) | - | - |
| 9 | - | - | - |
模式配置(SW3 拨码开关)
只有 UART1(DB9-1)支持通过 SW3 拨码开关进行模式切换(UART2 固定为 RS232)。该开关为 8 位 DIP 类型,在原理图中核心配置引脚标记为 MODE_0、MODE_1 和 MODE_2。
接口位置如下图所示:

配置规则
| 工作模式 | 拨码开关组合(MODE_2, MODE_1, MODE_0) | 开关状态操作 |
|---|---|---|
| RS232 | 0 (OFF), 0 (OFF), 1 (ON) | MODE_0:拨到 ON;MODE_1/MODE_2:保持 OFF |
| RS422 | 0 (OFF), 0 (OFF), 0 (OFF) 或 1 (ON), 0 (OFF), 0 (OFF) | MODE_0/MODE_1:保持 OFF;MODE_2:可选(ON/OFF) |
| RS485 | 0 (OFF), 1 (ON), 0 (OFF) 或 1 (ON), 1 (ON), 0 (OFF) | MODE_1:拨到 ON;MODE_0/MODE_2:可选(ON/OFF) |
完成硬件连接后,使用终端软件(例如 CuteCom)测试 UART 通信功能。如果未安装 CuteCom,可运行 sudo apt-get install cutecom 进行安装。请确保已通过 GPIO 命令使能对应的 UART 通道。
使用说明
GPIO 使能命令
在连接前,请在终端中执行 GPIO 使能命令以激活对应的 UART 通道:
# Enable UART1 (ttyTHS1)
sudo gpioset --mode=wait gpiochip0 2=0
# Enable UART2 (ttyTHS4)
sudo gpioset --mode=wait gpiochip2 15=0
RS232 模式测试
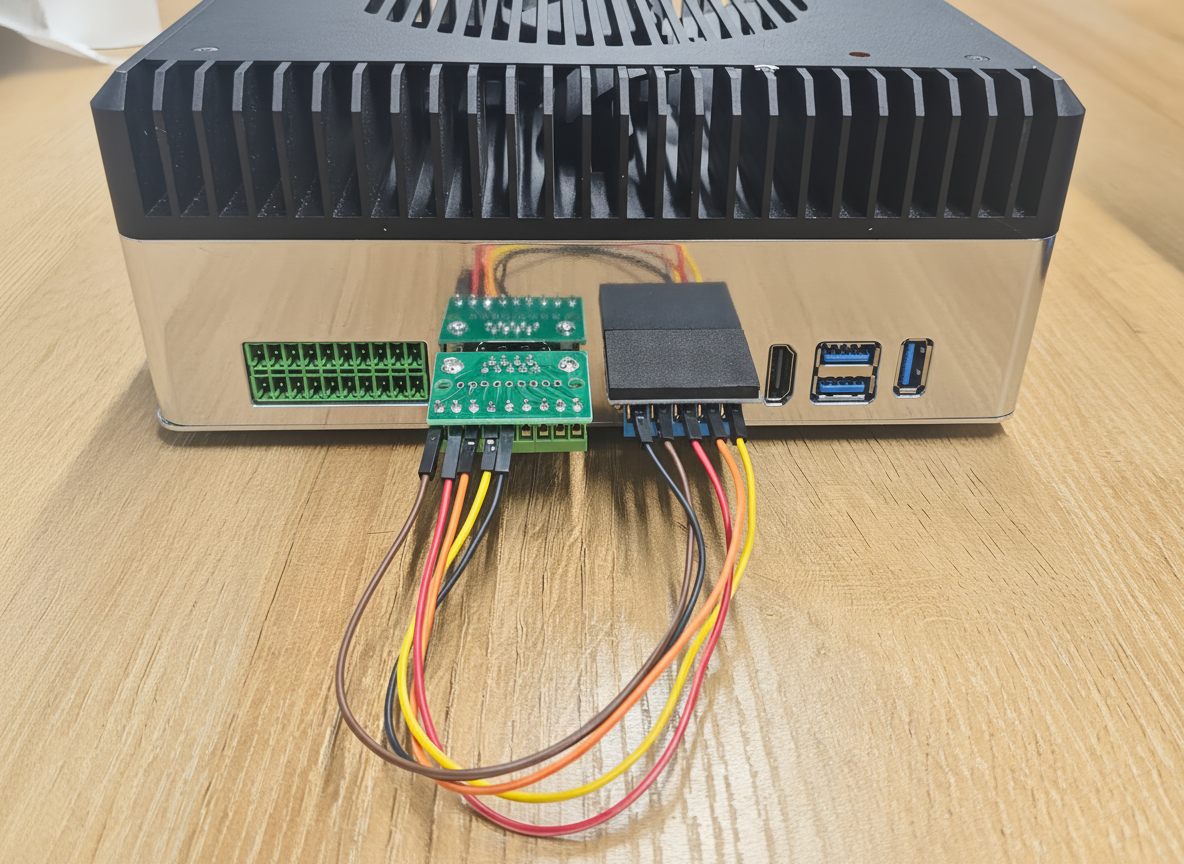
此处可以使用 USB 转 RS232 适配器来测试接口。我们在测试中使用了 UGREEN USB to RS232 Adapter。
接线示意图如下所示:

步骤 1:启动 CuteCom
运行 sudo cutecom 启动 CuteCom 终端软件。
步骤 2:配置串口参数 按以下参数配置串口:
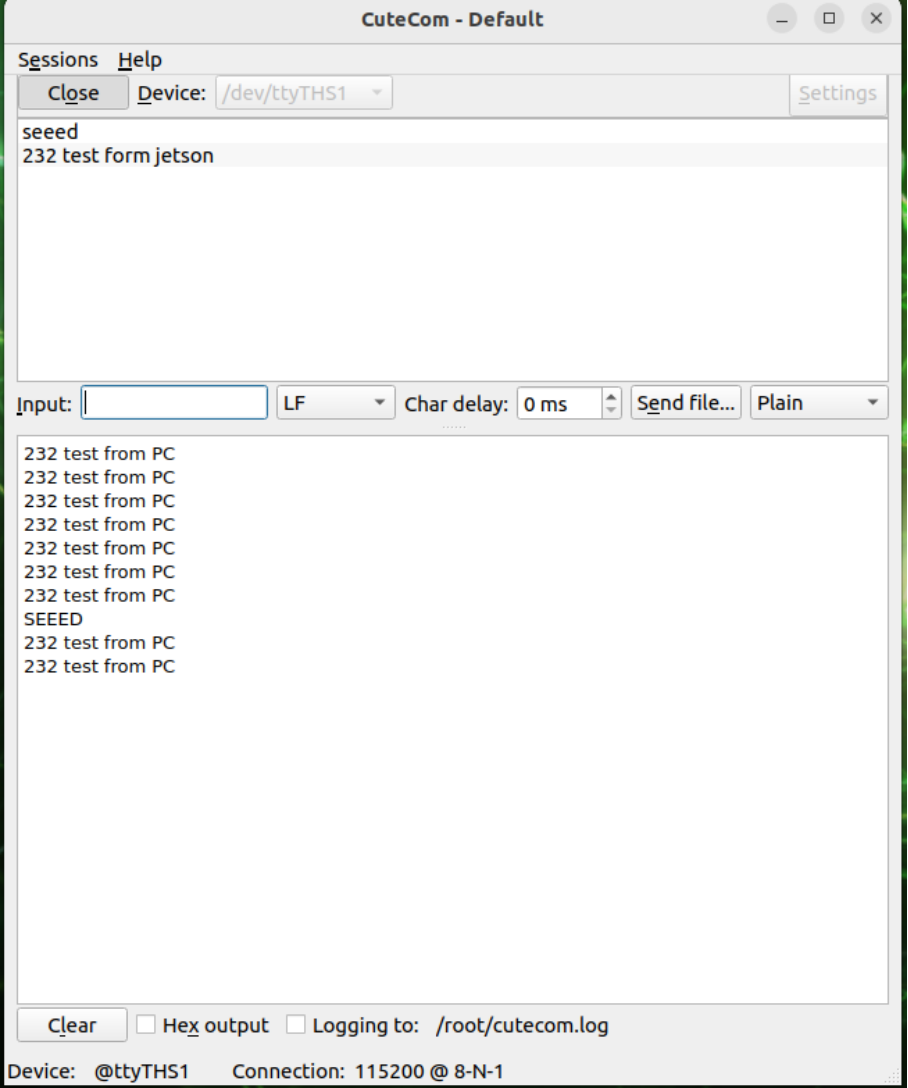
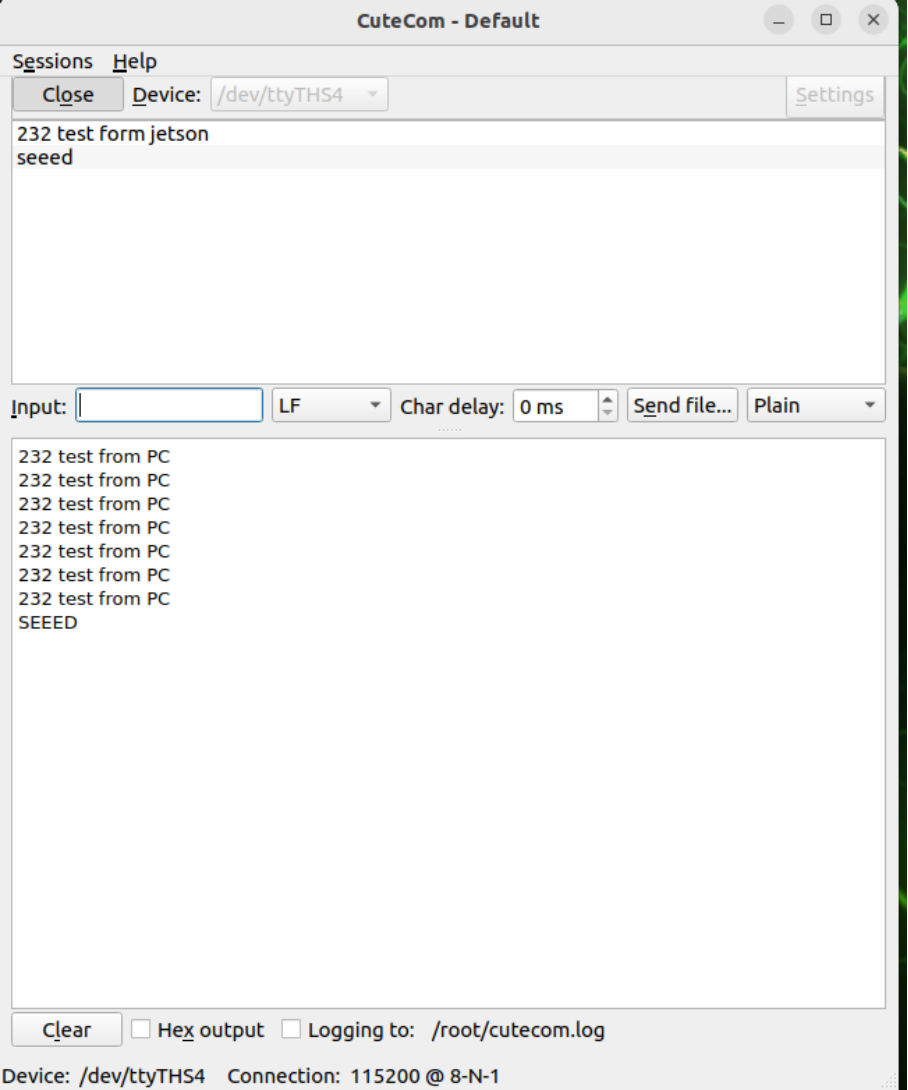
- 设备:
/dev/ttyTHS1(UART1)或/dev/ttyTHS4(UART2) - 波特率:115200 bps
- 数据位:8,校验:无,停止位:1,流控:无
步骤 3:打开串口 点击 "Open Device" 打开串口。
步骤 4:发送测试数据 发送测试数据(例如 "232 test from jetson"),并在外设设备端验证数据接收情况。
RS485 模式测试
此处可以使用 USB 转 RS485 适配器来测试接口。我们在测试中使用了 DTech USB to RS485 Adapter。
接线示意图如下所示:
步骤 1:启动 CuteCom
运行 sudo cutecom 启动 CuteCom 终端软件。
步骤 2:配置串口参数 按以下参数配置串口:
- 设备:
/dev/ttyTHS1 - 波特率:9600 bps
- 数据位:8,校验:无,停止位:1,流控:无
步骤 3:打开串口 点击 "Open Device" 打开串口。
步骤 4:发送测试数据 发送测试数据(例如 "485 test from jetson"),并在外设设备端验证数据接收情况。
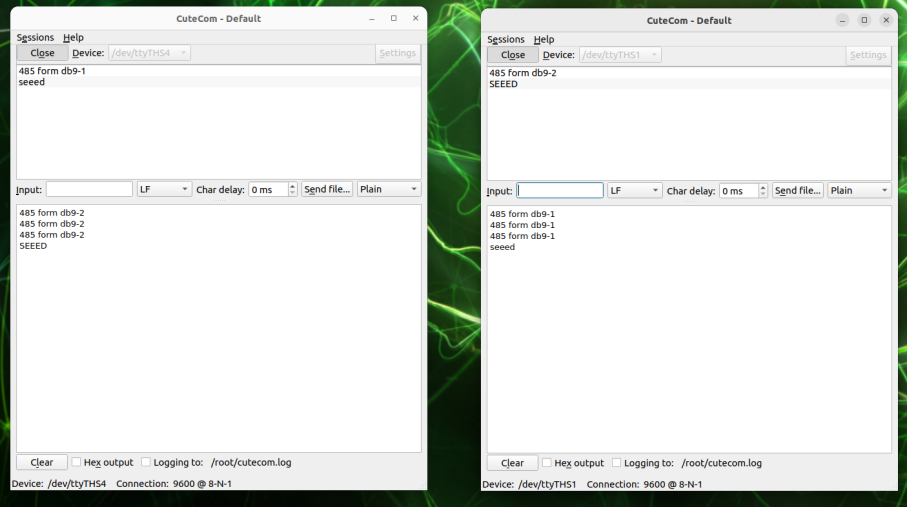
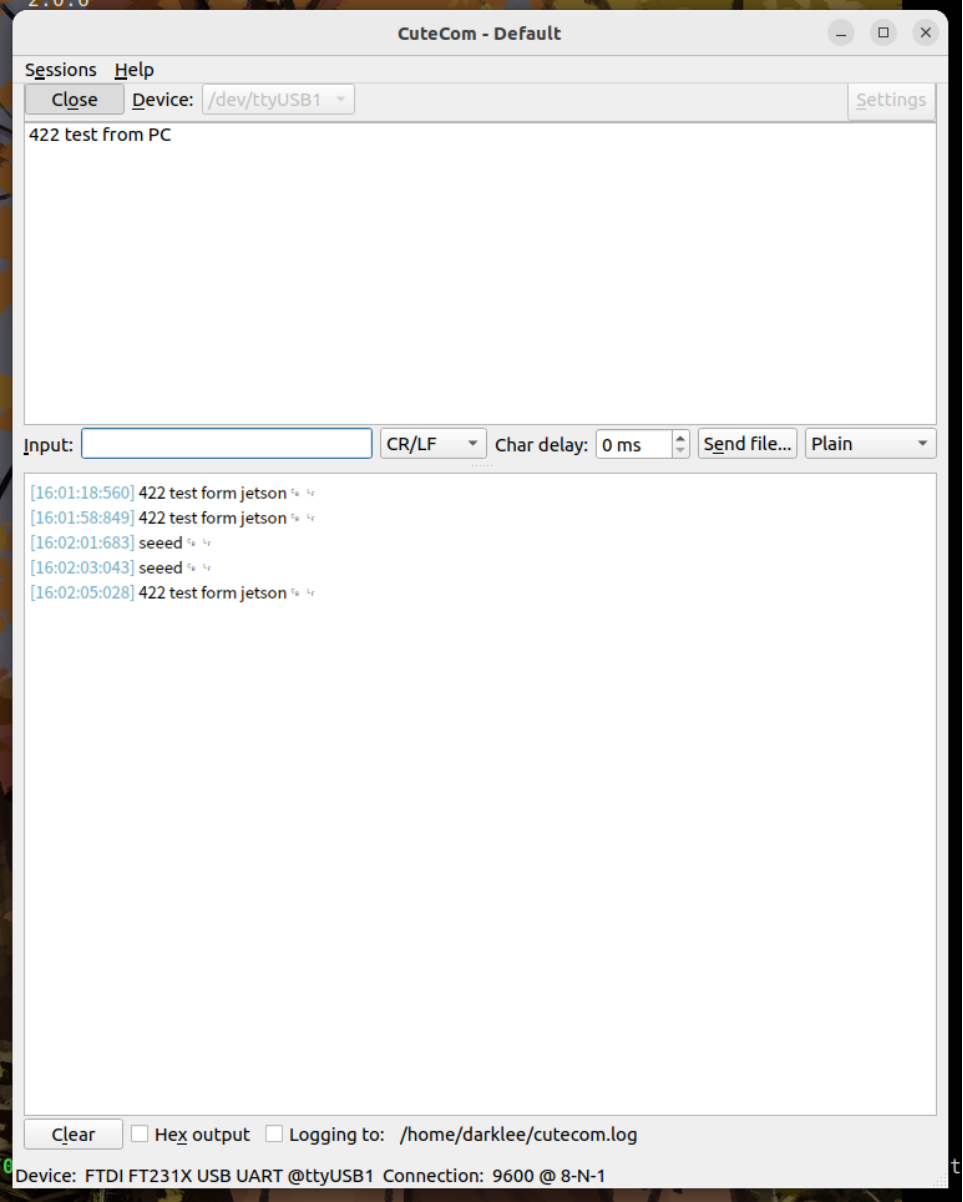
RS422 模式测试
此处可以使用 USB 转 RS422 适配器来测试接口。我们在测试中使用了 DTech USB to RS485 Adapter。
接线示意图如下所示:
步骤 1:启动 CuteCom
运行 sudo cutecom 启动 CuteCom 终端软件。
步骤 2:配置串口参数 按以下参数配置串口:
- 设备:
/dev/ttyTHS1 - 波特率:9600 bps
- 数据位:8,校验:无,停止位:1,流控:无
步骤 3:打开串口 点击 "Open Device" 打开串口。
步骤 4:发送测试数据 发送测试数据(例如 "422 test from jetson"),并在外设设备端验证数据接收情况。
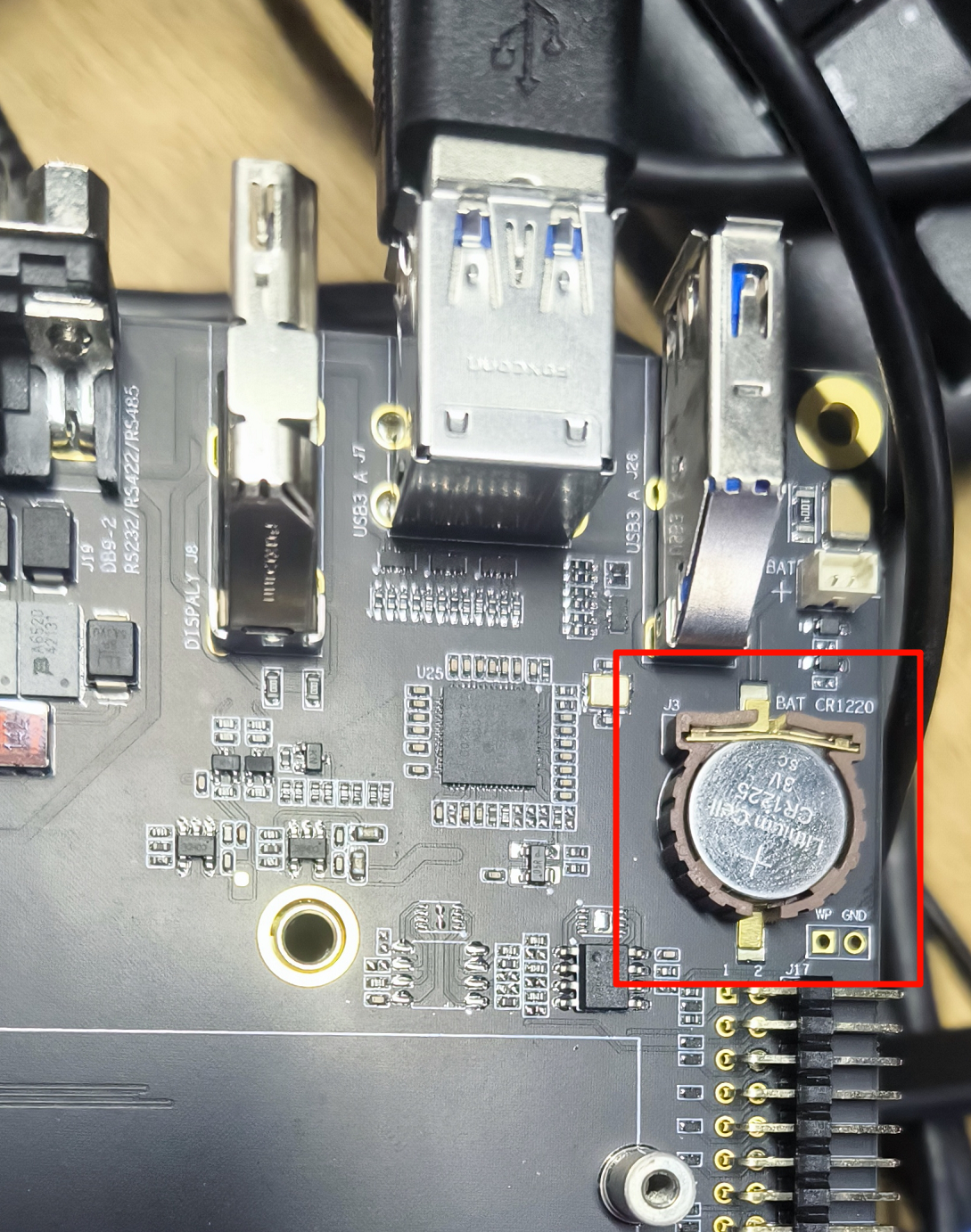
RTC
reComputer Robotics J501 集成了带电池备份的硬件 RTC,用于精确计时。为 RTC 提供备份电源有两种方式:
- 使用 CR1220 纽扣电池座(J14)
- 使用 RTC 2 针排针 J4 连接外部电源
硬件连接
方法 1:使用 CR1220 纽扣电池座
将一颗 3V CR1220 纽扣电池按下图所示连接到板载 RTC 插座。请确保电池正极(+)朝上。
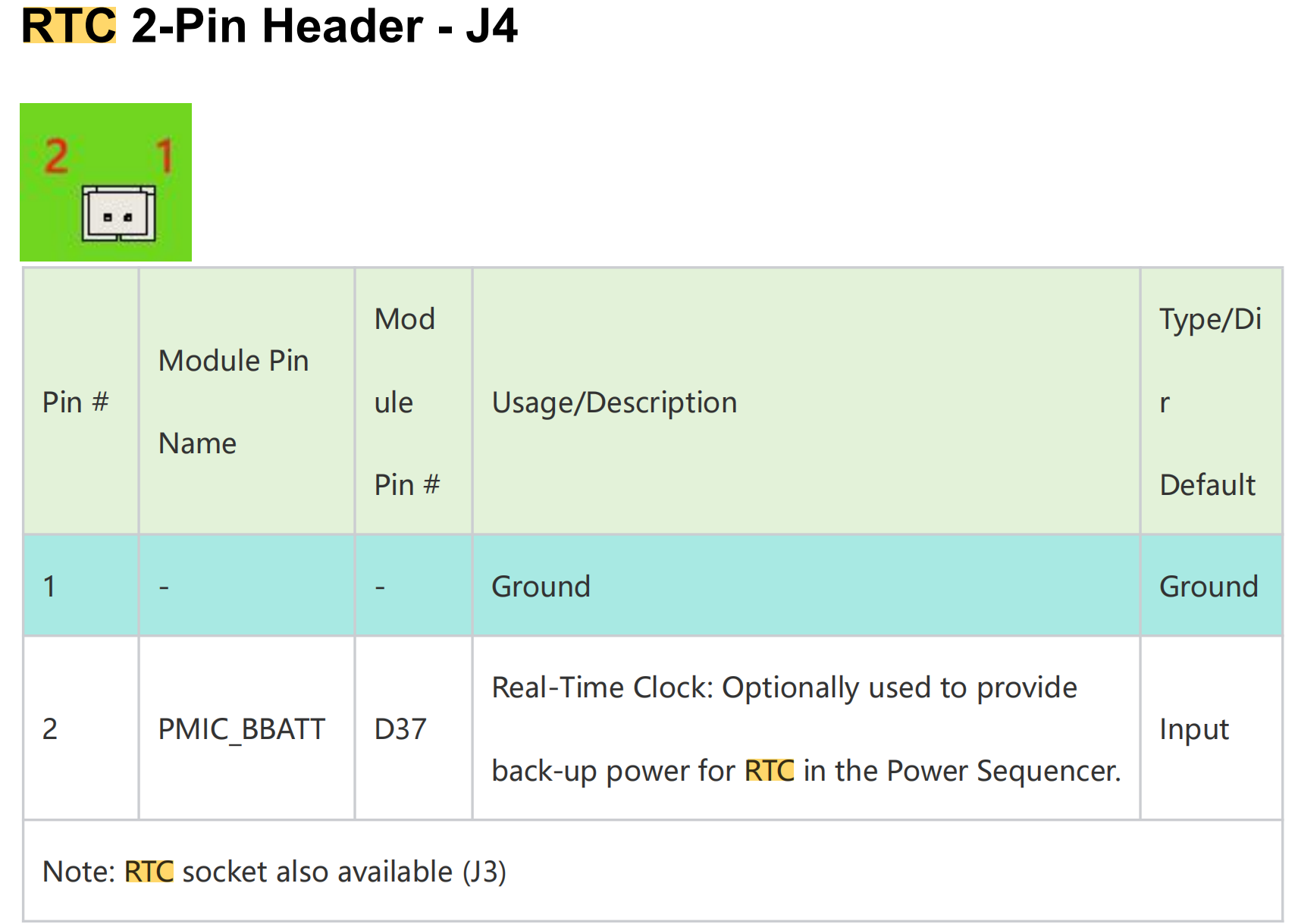
方法 2:使用 RTC 2 针排针
RTC 2 针排针提供了另一种为 RTC 连接外部电源的方式。
使用说明
步骤 1. 按上述说明连接 RTC 电池。
步骤 2. 打开 reComputer Robotics J501。
步骤 3. 在 Ubuntu 桌面上,点击右上角下拉菜单,进入 Settings > Date & Time,通过以太网线连接网络,并选择 Automatic Date & Time 以自动获取日期/时间。
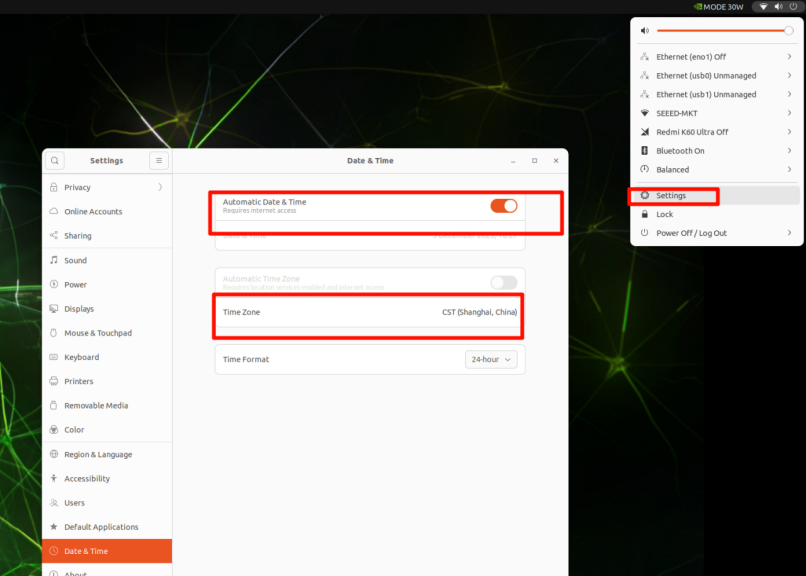
如果尚未通过以太网连接到互联网,也可以在此手动设置日期/时间。
步骤 4. 打开终端窗口,执行以下命令检查硬件时钟时间:
cat /sys/devices/platform/bpmp/bpmp\:i2c/i2c-4/4-003c/nvvrs-pseq-rtc/rtc/rtc0/time
步骤 5. 断开网络连接并重启设备。你会发现系统时间已经失去供电,但系统仍然可以正常运行。

显示
Robotics J501 配备了一个 HDMI 接口,用于高分辨率显示输出。
扩展端口
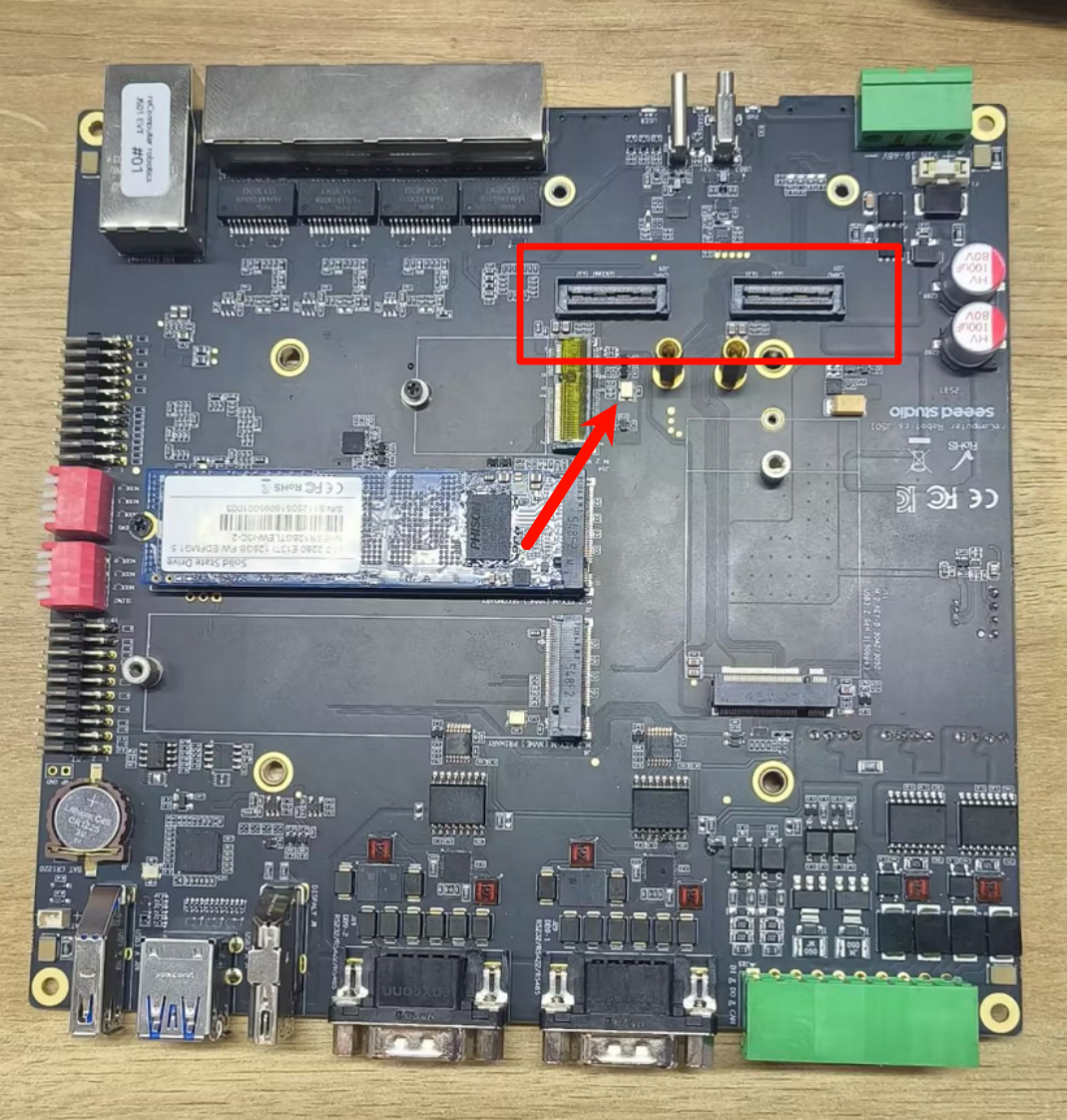
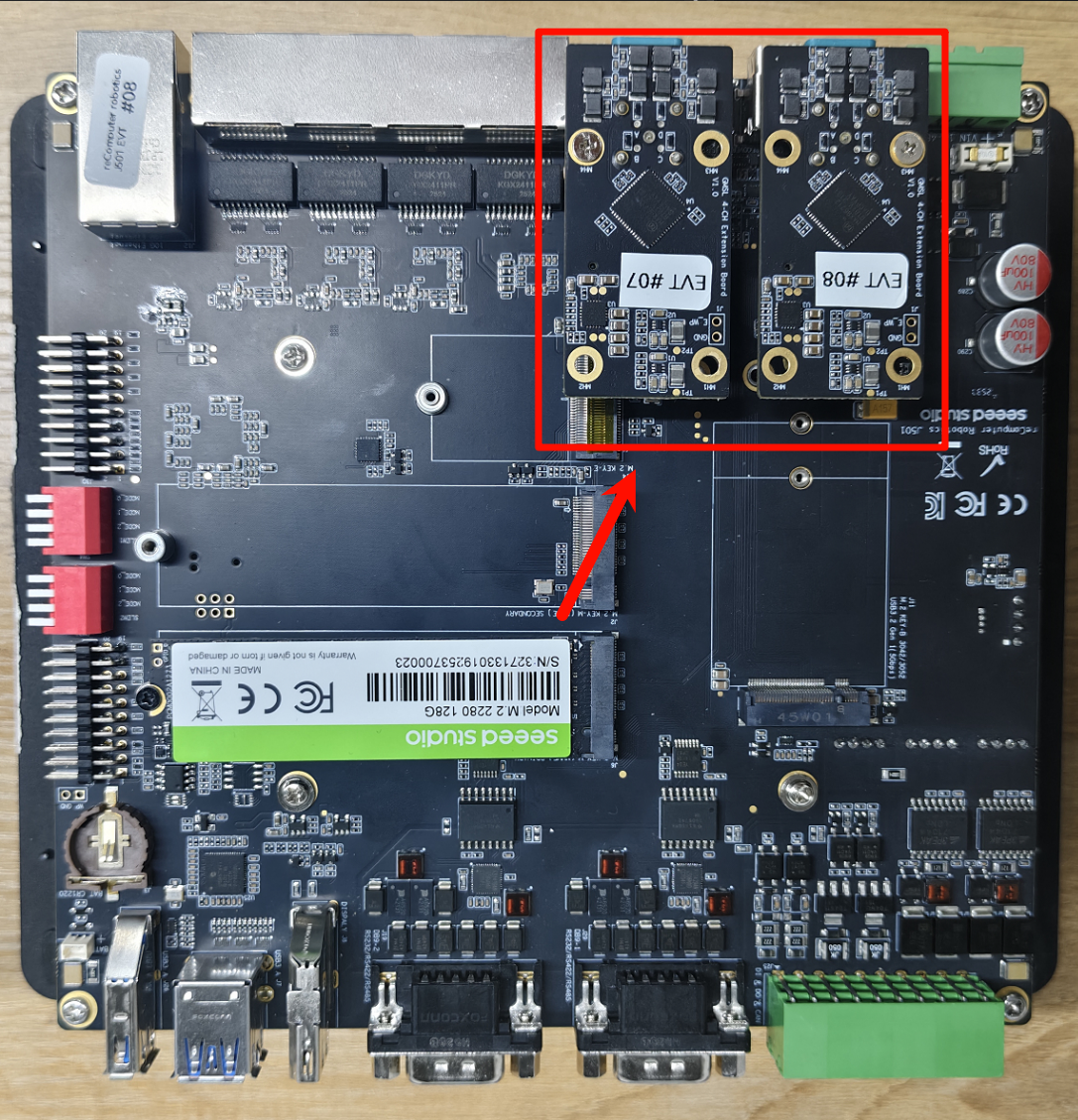
Robotics J501 载板配备了一个用于 GMSL 扩展板的摄像头扩展排针。它可以同时连接并运行 4 个 GMSL 摄像头。
硬件连接
下面是 Robotics J501 载板 GMSL 摄像头扩展板的连接插槽(需要提前准备扩展板):
以下是我们已经支持的 GMSL 摄像头型号:
- SG3S-ISX031C-GMSL2F
- SG2-AR0233C-5200-G2A
- SG2-IMX390C-5200-G2A
- SG8S-AR0820C-5300-G2A
- Orbbec Gemini 335Lg
使用说明
在启用 GMSL 功能之前,请确保你已经安装了带有 GMSL 扩展板驱动的 JetPack 版本。
配置 Jetson IO 文件
sudo /opt/nvidia/jetson-io/jetson-io.py
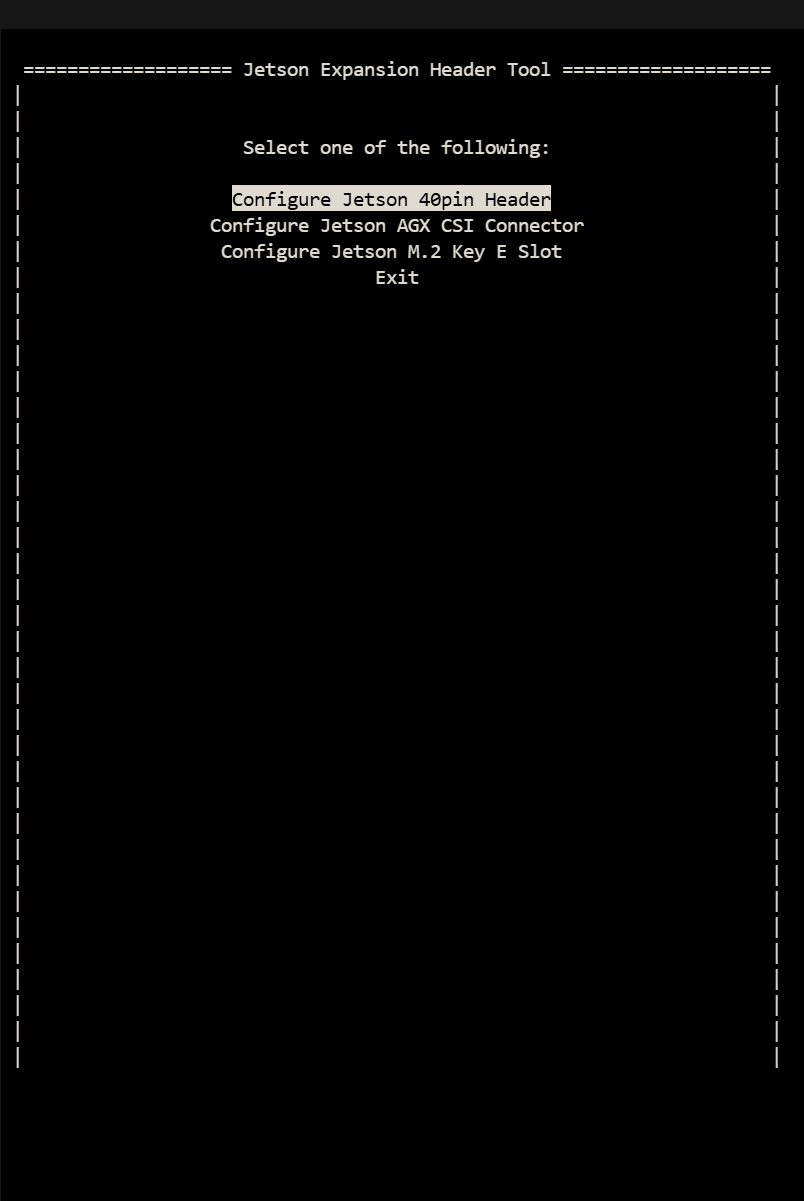
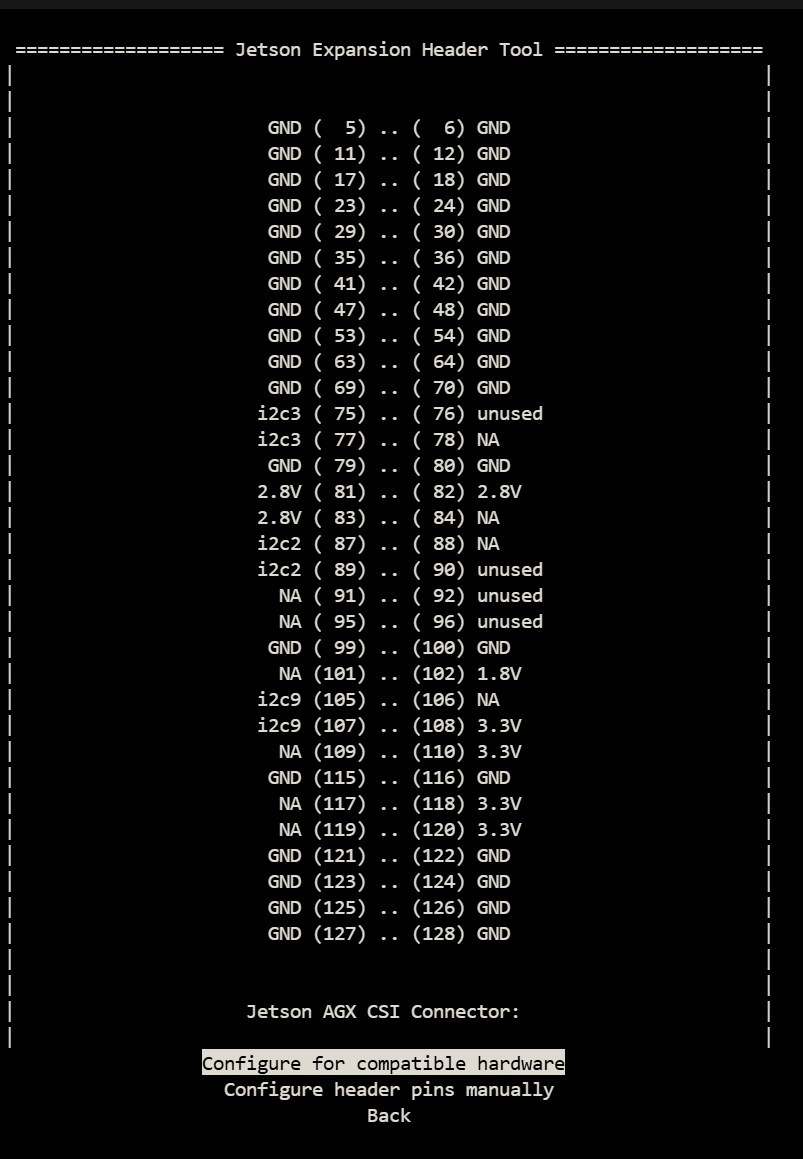
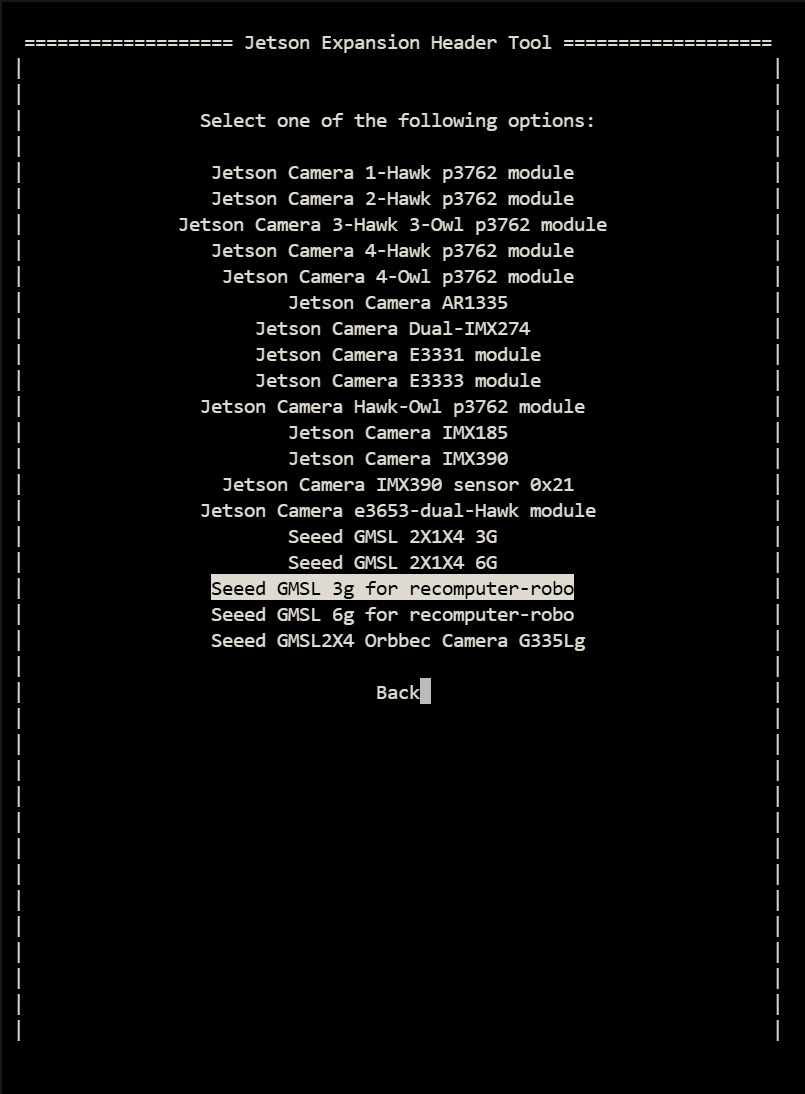
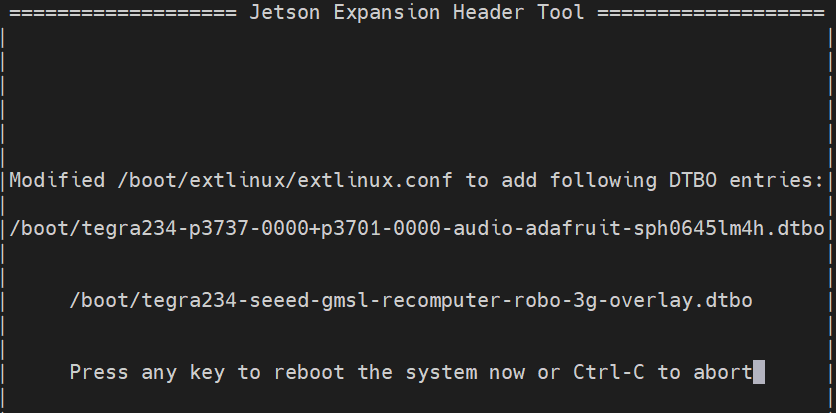
一共有三个 overlay 文件,分别是 Seeed GMSL 1X4 3G、Seeed GMSL 1X4 6G、Seeed GMSL 1X4 和 Orbbec Gemini 335Lg。它们分别对应 SG3S 的 3G 摄像头、SG2 和 SG8S 的 6G 摄像头,以及 Orbbec 的摄像头。如图 3 所示,请根据你摄像头的型号配置 io 文件。
步骤 2. 安装视频接口配置工具。
sudo apt update
sudo apt install v4l-utils wmctrl
使用 SGxxx 系列摄像头
步骤 1. 设置帧同步模式(默认未启用!)。
这里我们演示如何配置不同型号和分辨率的摄像头。
#enables frame synchronization
v4l2-ctl -d /dev/video0 --set-ctrl=trig_mode=1
#Set the frame rate of the camera
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 --stream-mmap -d /dev/video0
#Set the camera format
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video0
trig_mode = 1 启用帧同步,而 trig_mode = 0 禁用帧同步。默认设置为禁用帧同步。
--set-fmt-video 后面跟随的分辨率是根据所连接摄像头选择的。目前有三个 sensor_mode 选项,每个选项对应一种不同的分辨率。
- sensor_mode=0 -------> YUYV8_1X16/1920x1536
- sensor_mode=1 -------> YUYV8_1X16/1920x1080
- sensor_mode=2 -------> YUYV8_1X16/3840x2160
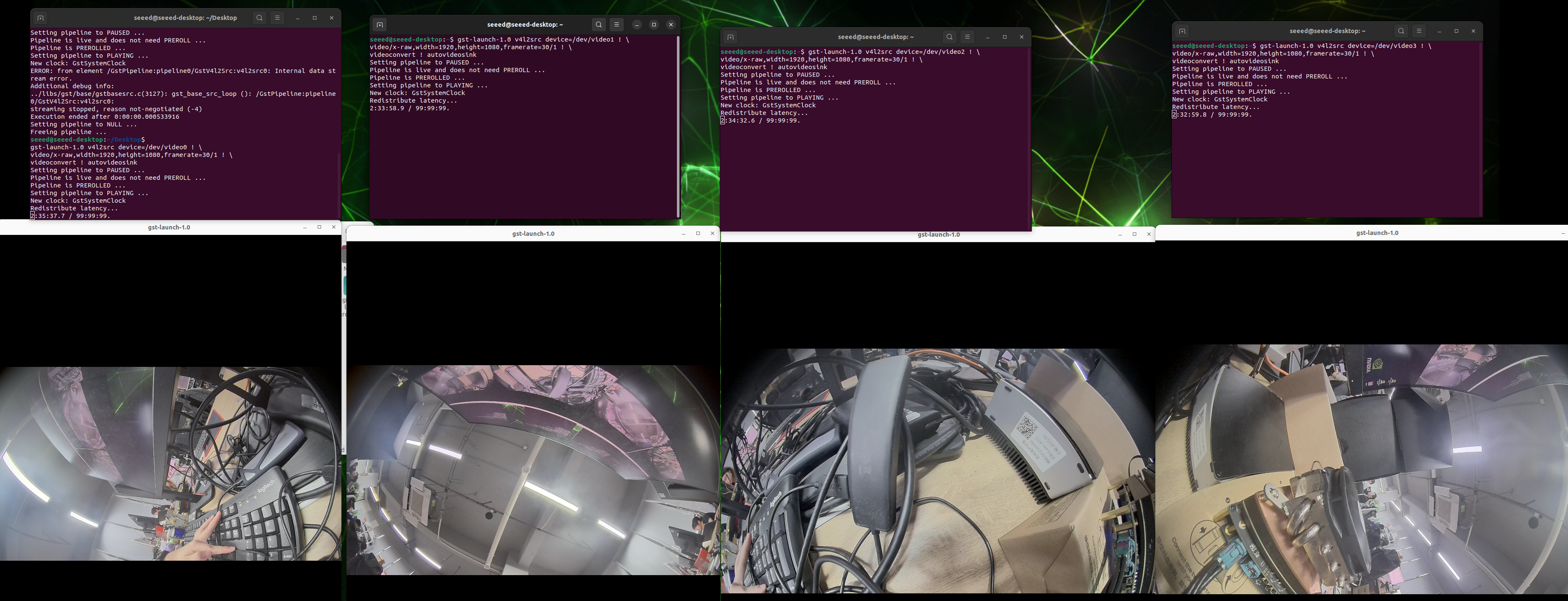
步骤 2. 启动摄像头。
gst-launch-1.0 \
v4l2src device=/dev/video0 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video1 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video2 ! \
video/x-raw,format=YUY2,width=1536,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video3 ! \
video/x-raw,format=YUY2,width=3840,height=2160,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
资源
- reComputer Robotics J501 载板原理图
- reComputer Robotics J501 载板数据手册
- Seeed NVIDIA Jetson 产品目录
- Nvidia Jetson 对比
- Seeed Nvidia Jetson 成功案例
- Seeed Jetson 一页纸简介
- Seeed 的 L4T 源代码
技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,以确保你在使用我们产品的过程中尽可能顺利。我们提供多种沟通渠道,以满足不同的偏好和需求。