Jetson 上的 YOLOv26 双 USB 摄像头图像处理系统
本 wiki 演示如何从零开始构建基于 YOLOv26 模型和 TensorRT 加速的双 USB 摄像头图像处理系统。该系统包含以下功能:
- 双摄像头并行处理:同时对两个 USB 摄像头进行实时视频流处理
- 多任务视觉分析:目标检测、姿态估计、图像分割(SAM 模型)
- TensorRT 加速:使用 NVIDIA TensorRT 引擎显著提高推理速度
- Web 界面预览:通过浏览器实时查看处理结果
- MJPEG 压缩:减少 USB 带宽使用并提高系统稳定性
前提条件
- reComputer J4012 或 reCompuer 系列的其他产品
- 2 个 USB 摄像头
- USB Type-C 数据传输线(连接摄像头)
从 GitHub 下载
方法 1:克隆整个仓库(推荐)
这是一次性获取所有文件的最简单方法:
# 1. Navigate to your home directory
# !!Replace this with your own username
cd /home/seeed
# 2. Clone the repository
git clone https://github.com/bleaaach/yolov26_jetson.git
# 3. Navigate to the project directory
cd yolov26_jetson
# 4. View downloaded files
ls -la
您应该看到以下文件:
run_dual_camera_docker.sh- Docker 部署脚本run_dual_camera_local.sh- 本地部署脚本README.md- 此文档文件
方法 2:下载单个文件
如果您只需要特定的脚本文件,可以使用 wget 单独下载:
# 1. Navigate to your home directory
cd /home/seeed
# 2. Create project directory
mkdir -p yolov26_jetson
cd yolov26_jetson
# 3. Download Docker script
wget https://raw.githubusercontent.com/bleaaach/yolov26_jetson/main/run_dual_camera_docker.sh
# 4. Download Local script
wget https://raw.githubusercontent.com/bleaaach/yolov26_jetson/main/run_dual_camera_local.sh
# 5. Download README documentation
wget https://raw.githubusercontent.com/bleaaach/yolov26_jetson/main/README.md
# 6. View downloaded files
ls -la
验证下载的文件
下载后,验证文件是否存在:
# View file list
ls -la
# Check file permissions
如果脚本没有执行权限,请添加权限:
# Add execute permissions
chmod +x run_dual_camera_docker.sh
chmod +x run_dual_camera_local.sh
# Check again
ls -la
两种部署方法的比较
| 功能 | Docker 方法 | 本地方法 |
|---|---|---|
| 环境隔离 | ✅ 完全隔离,不污染主机环境 | ❌ 直接安装在主机上 |
| 部署速度 | ✅ 快速,一键启动 | ❌ 需要手动安装许多依赖项 |
| 硬件访问 | ⚠️ 需要设备映射配置 | ✅ 直接访问所有硬件 |
| 性能 | ⚠️ 有容器开销 | ✅ 更好的性能 |
| 存储空间 | ⚠️ 需要约 2GB Docker 镜像 | ✅ 更少的存储使用 |
| 推荐使用场景 | 快速测试,多设备部署 | 生产环境,最佳性能 |
(选项 1)本地环境设置
步骤 1. 更新软件包列表并安装 pip
# Update package list
sudo apt update
# Install pip
sudo apt install python3-pip -y
# Upgrade pip
pip install -U pip
如果系统未预装 pip,使用以下命令安装:
# Download get-pip.py
curl https://bootstrap.pypa.io/get-pip.py -o get-pip.py
# Install pip
python3 get-pip.py --user
步骤 2. 安装 Ultralytics 包
安装 Ultralytics 及其可选依赖项(用于模型导出):
# Install Ultralytics
~/.local/bin/pip install ultralytics[export]
步骤 3. 安装 PyTorch 和 Torchvision
重要:通过 pip 安装的 PyTorch 和 Torchvision 与 Jetson 的 ARM64 架构不兼容。您需要手动安装专为 Jetson 构建的版本。
首先卸载不兼容的版本:
# Uninstall incompatible versions
~/.local/bin/pip uninstall torch torchvision -y
然后安装 JetPack 6.1 兼容版本:
# Install PyTorch 2.5.0
~/.local/bin/pip install https://github.com/ultralytics/assets/releases/download/v0.0.0/torch-2.5.0a0+872d972e41.nv24.08-cp310-cp310-linux_aarch64.whl
# Install Torchvision 0.20
~/.local/bin/pip install https://github.com/ultralytics/assets/releases/download/v0.0.0/torchvision-0.20.0a0+afc54f7-cp310-cp310-linux_aarch64.whl
如果 GitHub 下载速度慢,可以使用加速代理:
# Use gh proxy to download PyTorch
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/torch-2.5.0a0+872d972e41.nv24.08-cp310-cp310-linux_aarch64.whl
# Use gh proxy to download Torchvision
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/torchvision-0.20.0a0+afc54f7-cp310-cp310-linux_aarch64.whl
步骤 4. 安装 cuSPARSELt
cuSPARSELt 是 PyTorch 2.5.0 的依赖项,需要单独安装:
# Install cuSPARSELt
sudo apt-get install -y libcusparselt0
步骤 5. 安装 onnxruntime-gpu
onnxruntime-gpu 用于某些模型导出功能。由于 PyPI 上的包不包含 Jetson 的 aarch64 二进制文件,需要手动安装:
# Install onnxruntime-gpu 1.23.0
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/onnxruntime_gpu-1.23.0-cp310-cp310-linux_aarch64.whl
或使用版本 1.20.0:
# Install onnxruntime-gpu 1.20.0
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/onnxruntime_gpu-1.20.0-cp310-cp310-linux_aarch64.whl
步骤 6. 配置 PATH 环境变量
由于使用了用户安装模式,pip 安装的可执行文件位于 ~/.local/bin/ 目录中。建议将此目录添加到 PATH 环境变量:
# Add to .bashrc
echo 'export PATH=$PATH:~/.local/bin' >> ~/.bashrc
# Reload .bashrc
source ~/.bashrc
步骤 7. 验证安装
检查已安装的包版本:
# Check versions
python3 -c "import ultralytics; import torch; import torchvision; import onnxruntime; print('ultralytics version:', ultralytics.__version__); print('torch version:', torch.__version__); print('torchvision version:', torchvision.__version__); print('onnxruntime version:', onnxruntime.__version__)"
预期输出:
ultralytics version: 8.4.7
torch version: 2.5.0a0+872d972e41.nv24.08
torchvision version: 0.20.0a0+afc54f7
onnxruntime version: 1.23.0
步骤 8. 测试 YOLOv26 推理功能
from ultralytics import YOLO
import torch
# Check if CUDA is available
print(f"CUDA available: {torch.cuda.is_available()}")
if torch.cuda.is_available():
print(f"CUDA device count: {torch.cuda.device_count()}")
print(f"CUDA device name: {torch.cuda.get_device_name(0)}")
# Load YOLOv26n model
model = YOLO('yolo26v26n.pt')
print(f"Model loaded successfully!")
# Perform inference test
results = model('https://ultralytics.com/images/bus.jpg')
print(f"Inference successful! Detected {len(results[0].boxes)} objects")
# Display detection results
for i, box in enumerate(results[0].boxes):
cls_id = int(box.cls[0])
conf = float(box.conf[0])
cls_name = model.names[cls_id]
print(f" Object {i+1}: {cls_name} (confidence: {conf:.2f})")
步骤 9. 准备模型文件
确保模型文件下载到正确位置:
# Check model directory
ls -la /home/seeed/ultralytics_data/
# Create directory if it doesn't exist
mkdir -p /home/seeed/ultralytics_data
如果模型文件不存在,请先下载:
# Navigate to model directory
cd /home/seeed/ultralytics_data
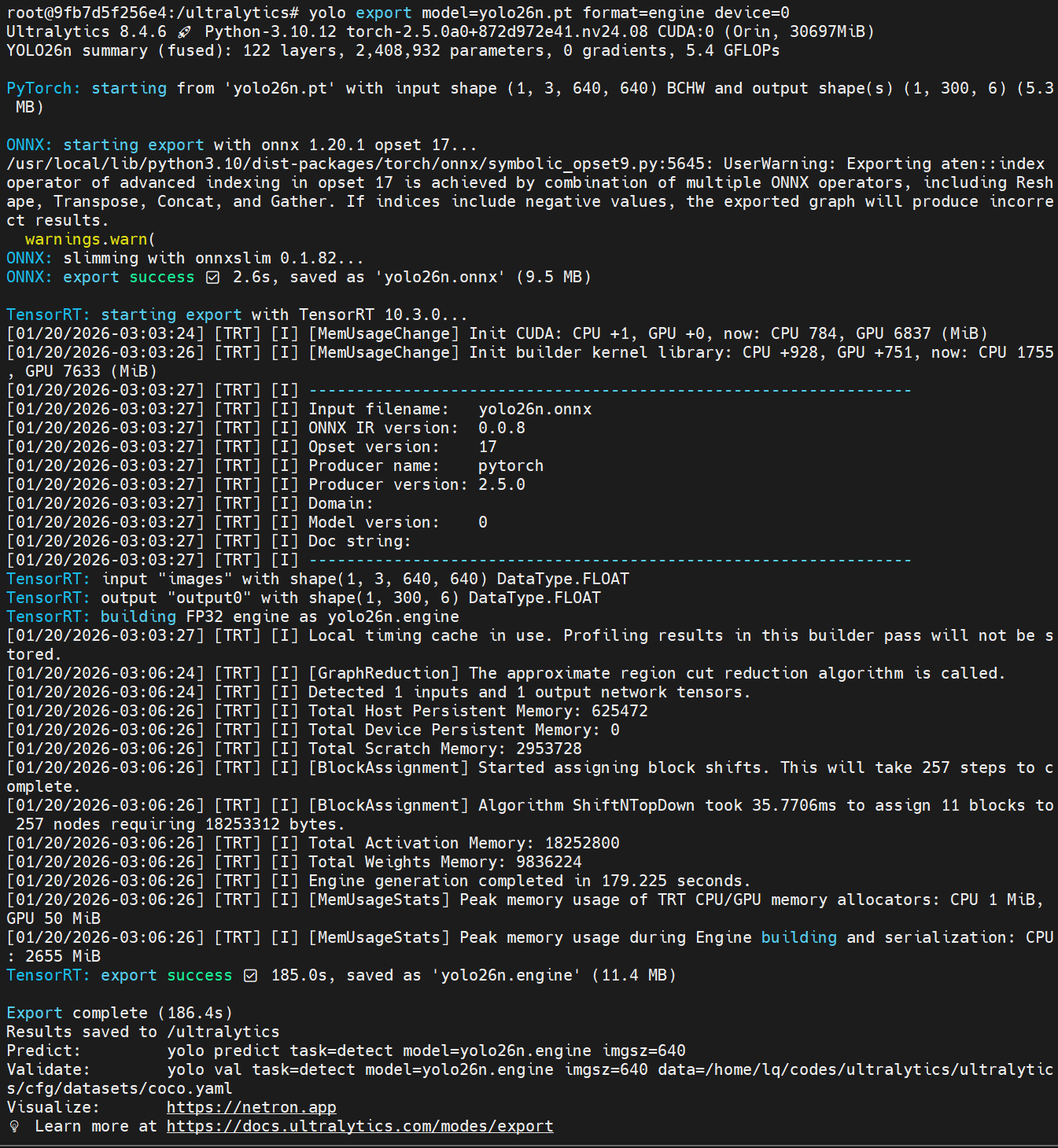
# Download object detection model
yolo export model=yolov26n.pt format=engine device=0
# Download pose estimation model
yolo export model=yolov26n-pose.pt format=engine device=0
# Download segmentation model
yolo export model=yolov26n-seg.pt format=engine device=0
# Verify model files
ls -la
您应该看到以下文件:
yolo26n.engineyolo26n-pose.engineyolo26n-seg.engine
步骤 10. 运行本地脚本
现在您可以运行本地脚本:
# 1. Navigate to project directory
cd /home/seeed/yolov26_jetson
# 2. Ensure script has execute permissions
chmod +x run_dual_camera_local.sh
# 3. Run Local script
./run_dual_camera_local.sh
(选项 2)Docker 环境设置
步骤 1. 确保 Docker 已安装
首先检查 Docker 是否已安装:
# Check Docker version
docker --version
如果 Docker 未安装,请先安装:
# Update package list
sudo apt update
# Install Docker
sudo apt install docker.io -y
# Start Docker service
sudo systemctl start docker
# Add current user to docker group
sudo usermod -aG docker $USER
# Re-login to apply changes
newgrp docker
有关配置 Docker 环境的更多详细信息,请参考此 GitHub 仓库:https://github.com/zibochen6/reComputer-Jetson-for-Beginners/tree/main/3-Basic-Tools-and-Getting-Started/3.7-Docker/
步骤 2. 确保 Docker 服务正在运行
# Check Docker service status
sudo systemctl status docker
如果 Docker 未运行,请启动它:
# Start Docker service
sudo systemctl start docker
步骤 3. 准备模型文件
确保模型文件下载到正确位置:
# Check model directory
ls -la /home/seeed/ultralytics_data/
# Create directory if it doesn't exist
mkdir -p /home/seeed/ultralytics_data
如果模型文件不存在,请先下载它们:
# Navigate to model directory
cd /home/seeed/ultralytics_data
# Download object detection model
yolo export model=yolov26n.pt format=engine device=0
# Download pose estimation model
yolo export model=yolov26n-pose.pt format=engine device=0
# Download segmentation model
yolo export model=yolov26n-seg.pt format=engine device=0
# Verify model files
ls -la
您应该看到以下文件:
yolo26n.engineyolo26n-pose.engineyolo26n-seg.engine
步骤 4. 运行 Docker 脚本
现在您可以运行 Docker 脚本:
# 1. Navigate to project directory
cd /home/seeed/yolov26_jetson
# 2. Ensure script has execute permissions
chmod +x run_dual_camera_docker.sh
# 3. Run Docker script
./run_dual_camera_docker.sh
步骤 5. 访问 Web 界面
在浏览器中打开以下地址:
http://localhost:5000
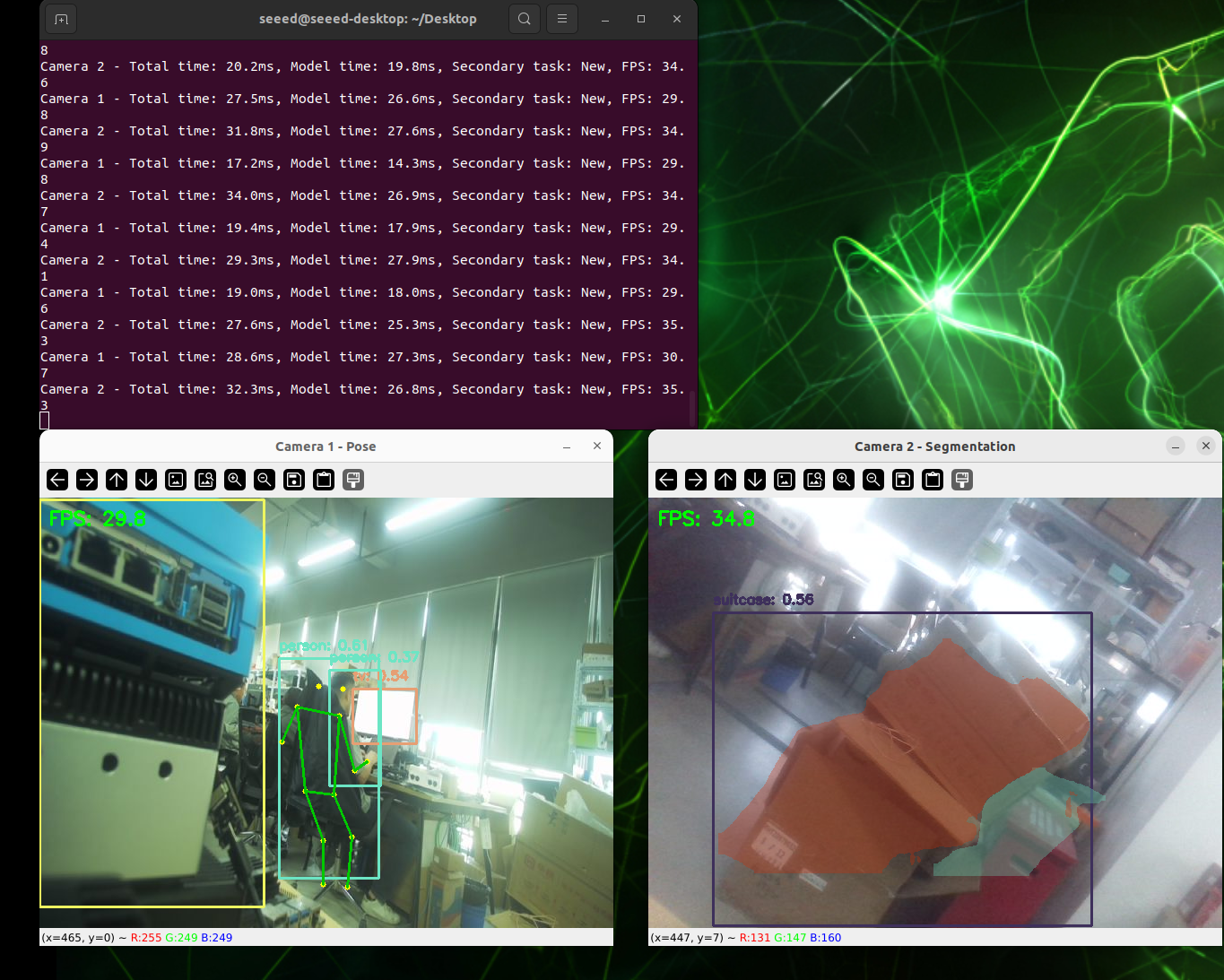
此时浏览器将并排显示两个摄像头的实时画面,类似于"左摄像头画面 | 右摄像头画面"。实际帧率和分辨率取决于您的硬件性能。
如果您需要重启系统:
# 1. Stop and remove existing container
docker rm -f dual-camera-system
# 2. Re-run script
cd /home/seeed/yolov26_jetson
./run_dual_camera_docker.sh
资源
技术支持与产品讨论
感谢您选择 Seeed Studio 产品!如需技术支持和产品讨论,请使用以下渠道: