Atom-S 入门指南
简介
Atom-S 是一款 10 自由度(Degrees of Freedom)的开源双足人形机器人套件,面向开发者、创客和教育机构设计。整机由十个 Fashionstar RA8-U25H-M 总线舵机驱动,采用完全开源的 3D 打印结构,并配备 Seeed Studio XIAO ESP32-S3 主控和 Grove 扩展板。出厂已预装完整的控制固件。其核心亮点是免安装的网页可视化动作编辑器——你可以通过浏览器实时调试舵机、录制示教动作,并直接导出 JSON,便于在 Arduino、STM32 和 Raspberry Pi 等平台上复现。随附的 RUC-01 转接板提供 5 V / 3.3 V 稳压电源和 UART 接口,支持蓝牙和网页远程控制。开箱即可使用,是桌面级机器人开发与算法验证的理想平台。

1. 产品介绍
- 自由度布局:机器人具备 10 个自由度,覆盖手臂、躯干和双腿。
- 结构与外观:全 3D 打印结构,官方开源 STP / STL 模型文件,便于零件更换、结构加固和外观改造。
- 关节执行器:十个 Fashionstar RA8-U25H-M 总线舵机,通过总线通信实现整洁、简化的布线。
- 网页动作编辑器:基于浏览器的控制面板,支持舵机实时调试和示教编程。完成的动作组可导出为标准
.json文件,便于在 Arduino、STM32 和 Raspberry Pi 平台上解析。 - 开箱即用:默认搭载 Seeed Studio XIAO ESP32-S3 作为主控板,出厂已预烧演示程序。
- 多模块扩展:配合 Seeed Studio XIAO 扩展板,板载 Grove 接口可连接 Seeed Grove 传感器和控制器。
- 跨平台兼容性:RUC-01 转接板提供 5 V / 3.3 V 电源输出和 UART 接口,任何具备串口能力的控制器都可与其通信。
- 生态可扩展性:借助 Seeed Studio XIAO 扩展板上的 Grove 接口,可快速集成视觉、环境感知等 Grove 生态传感器和控制模块。
- 跨平台兼容性:标准 RUC-01 驱动转接板提供稳压 5 V / 3.3 V 输出和通用 UART 通信接口,便于外接 Raspberry Pi、STM32、Arduino、ESP32 或 PC 等平台。
2. 规格参数
| 参数 | 数值 |
|---|---|
| 自由度(DOF) | 10 |
| 机身结构 | 3D 打印 |
| 舵机 | RA8-U25H-M 总线舵机 |
| 舵机电源 / 接口板 | RUC-01,提供 4 个总线舵机端口、5 V / 3.3 V 控制器电源和串口(Grove) |
| 主控制器 | Seeed Studio XIAO ESP32-S3 + Seeed Studio XIAO 扩展板 |
| 通信方式 | 异步串行通信(UART) |
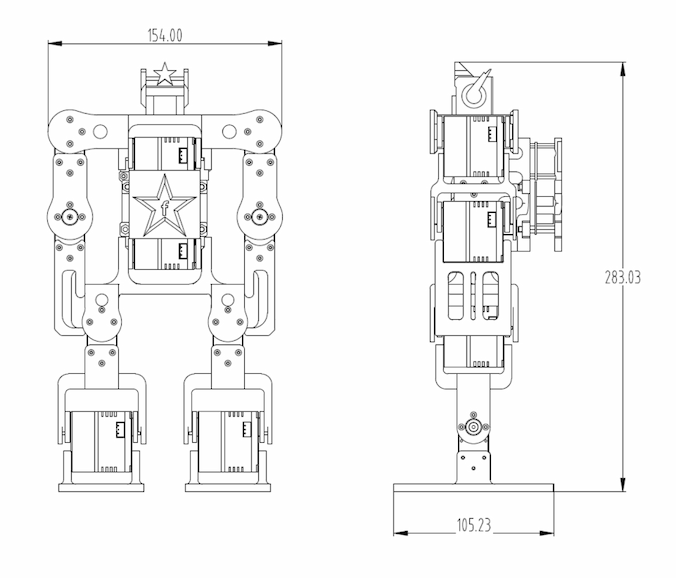
| 外形尺寸 | 154 × 105 × 283 mm |
3. 物料清单
| 项目 | 数量 |
|---|---|
| 10 自由度机器人(已组装) | 1 |
| KM 螺丝 M2 × 7 mm | 10 |
| KB 螺丝 M2 × 7 mm | 10 |
| PM 螺丝 M3 × 6 mm | 2 |
| 舵机线 200 mm 3 芯 | 2 |
10 自由度机器人组件包含
- RA8-U25H-M × 10
- 结构件(套件)× 1
- RUC-01 转接板 × 1
- Seeed XIAO ESP32-S3 × 1
- Seeed XIAO 扩展板 × 1
4. 外形尺寸
5. 硬件架构
驱动与供电(RUC-01 接口板)
作为整机的电源与通信枢纽,负责总线管理和电源分配:
- 舵机总线:板载 4 个总线舵机端口,支持串联扩展,同时传输信号与电源。
- PC 配置接口:USB Type-C,可直接连接 PC 主机进行配置。
- 系统电源:负责电压转换,为主控板提供稳定电源。
- 通信接口:标准 UART 串口,用于接收上位主控的指令。
逻辑控制与扩展(MCU + Grove 扩展板)
作为机器人的“大脑”,负责运行控制算法和传感器数据处理:
- 核心 MCU:Seeed Studio XIAO 系列开发板,体积小巧但性能强大。
- 生态扩展:Grove 扩展板引出丰富的 I/O 接口。
- 主要功能:运行机器人运动学程序,并通过 Grove 接口连接传感器(超声波、视觉、语音等),实现交互能力。
数据流
调试 / 编辑模式
PC --(USB)--> RUC-01 --(Bus)--> Servos
说明:通过 PC 端软件直接调整舵机角度并保存动作组,无需经过 XIAO 主控。
自主运行模式
Sensor / Remote --(Signal)--> XIAO --(UART Command)--> RUC-01 --(Bus)--> Servos
说明:XIAO 根据传感器反馈或预存代码自主控制机器人。
通用通信接口参考(跨平台开发必读)
虽然套件默认使用 XIAO ESP32S3 作为主控,但 RUC-01 接口板对任何外部控制器都是开放的。主控与 RUC-01 之间只需四根线即可完成基础通信:
- 5 V / 3.3 V:RUC-01 可向主控板反向供给稳定电源。
- GND:公共地。
- RX / TX:标准异步串行通信(UART),用于发送 / 接收控制指令和读取舵机反馈。
| 序号 | 接口说明 | 序号 | 接口说明 |
|---|---|---|---|
| ① | 主电源开关 | ⑤ | 转接板通信 UART / Grove 接口(连接主控 ⑧) |
| ② | 电源输入端口 | ⑥ | 主控 ESP32S3 Type-C 数据口(固件下载) |
| ③ | 舵机端口 × 4 | ⑦ | Seeed XIAO ESP32S3 主控板 |
| ④ | Type-C 数据口(舵机调试,连接 PC) | ⑧ | 主控通信 UART / Grove 接口(连接 RUC-01 接口板 ⑤) |
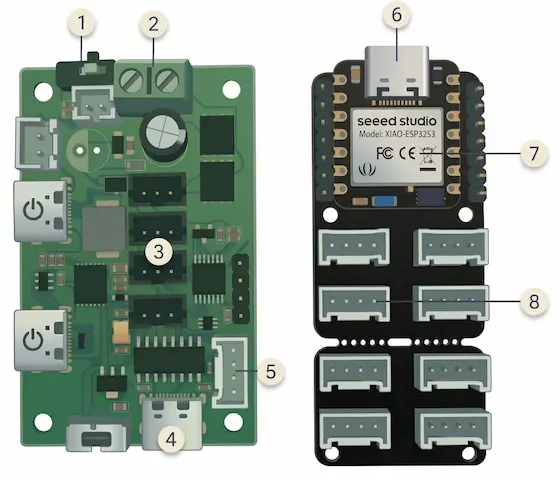
RUC-01 接口板上靠近 Type-C 端口 ④ 的拨动开关,以及示意图左侧显示的两个 Type-C 端口,预留用于其他用途,在本项目中不使用。请避免误操作。
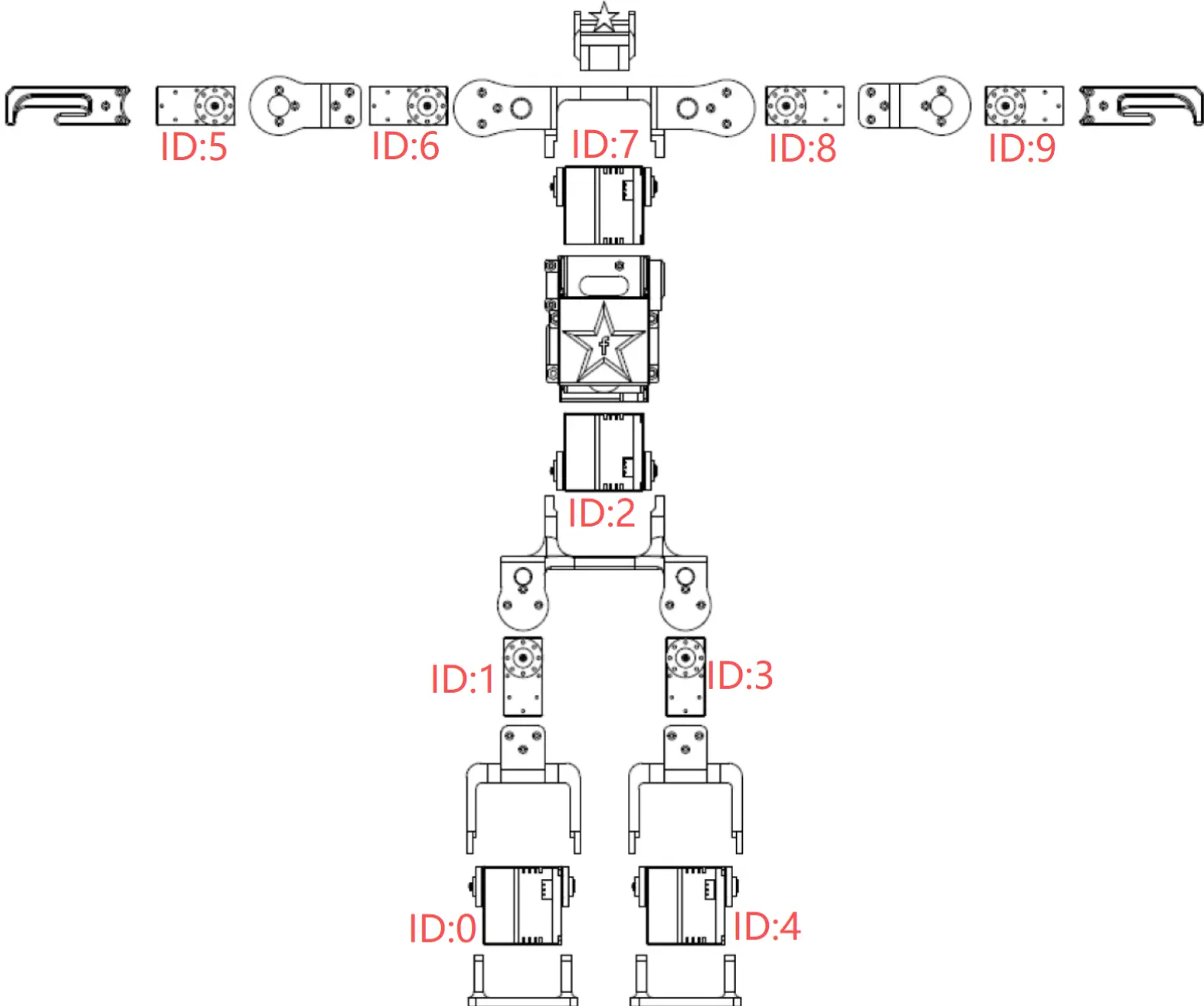
6. 机械结构
- 结构总览与默认舵机 ID
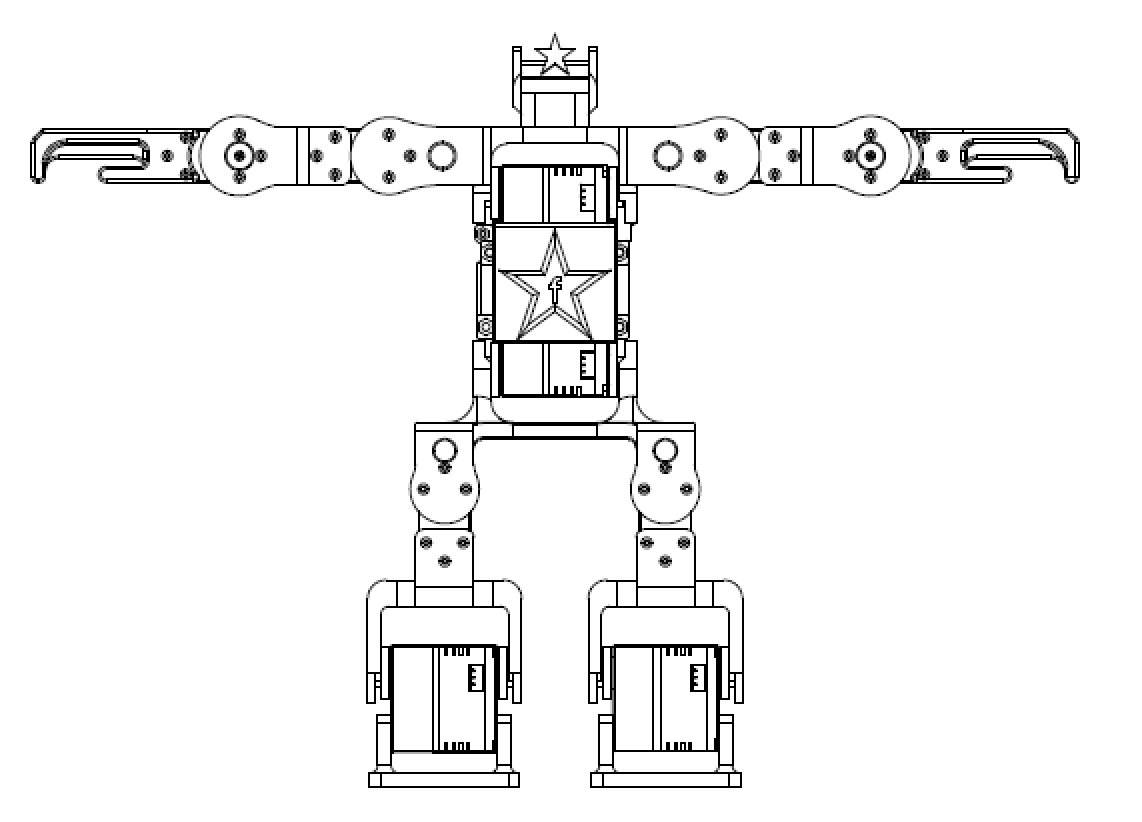
- 全部舵机零度姿态
7. 图纸与模型下载
如需获取完整的 3D 打印数据,请访问:MakerWorld - Atom S
我们将逐步提供更完整的装配视频和图文说明,请持续关注本页面的更新。
8. 运行你的第一个示例
开箱快速上手指南
Atom S 出厂已完成基础控制程序烧录和初步装配。你只需准备电源和一部手机,即可快速体验机器人的动作和远程控制功能。
硬件供电准备
由于运输限制,套件默认不附带电池。开始使用前,请准备一块兼容电池并连接到机器人背部的电源接口:
- 电池规格:3S 12.6 V Li-Po(锂聚合物)电池
- 电池接口类型:T 型插头
- 上电检查:接通电源后,主控板(XIAO ESP32S3)上的指示灯会点亮,表示系统已启动。
网页遥控器连接
请在手机或支持蓝牙的 PC 上开启蓝牙功能,并根据操作系统选择兼容的浏览器。由于网页遥控依赖底层 Web Bluetooth API,浏览器兼容性至关重要:
- PC(Windows / macOS):请使用 Google Chrome 或 Microsoft Edge。
- Android:请使用 Google Chrome;不要使用系统默认浏览器,也不要通过微信扫码打开。
- iOS:Safari、Chrome 和 Edge 不支持 Web Bluetooth。请从 App Store 下载支持 WebBLE 协议的第三方浏览器,例如 Bluefy。
访问网址:Remote Controller
- 未连接状态:

- 点击界面顶部的 SYSTEM LINK 按钮搜索并连接设备:
- 在弹出的蓝牙设备列表中,选择名称为 ESP32_Pro_Remote 的设备并点击配对。
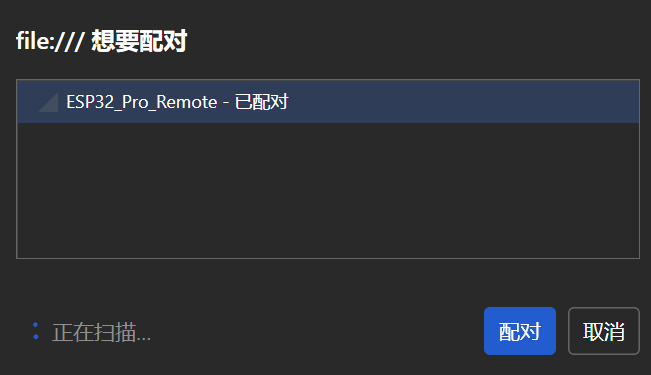
- 已连接:连接成功后,机器人会自动做出一次“鞠躬”动作并回到默认站立姿态,表示系统已准备就绪。

开始你的第一个连续动作示教序列
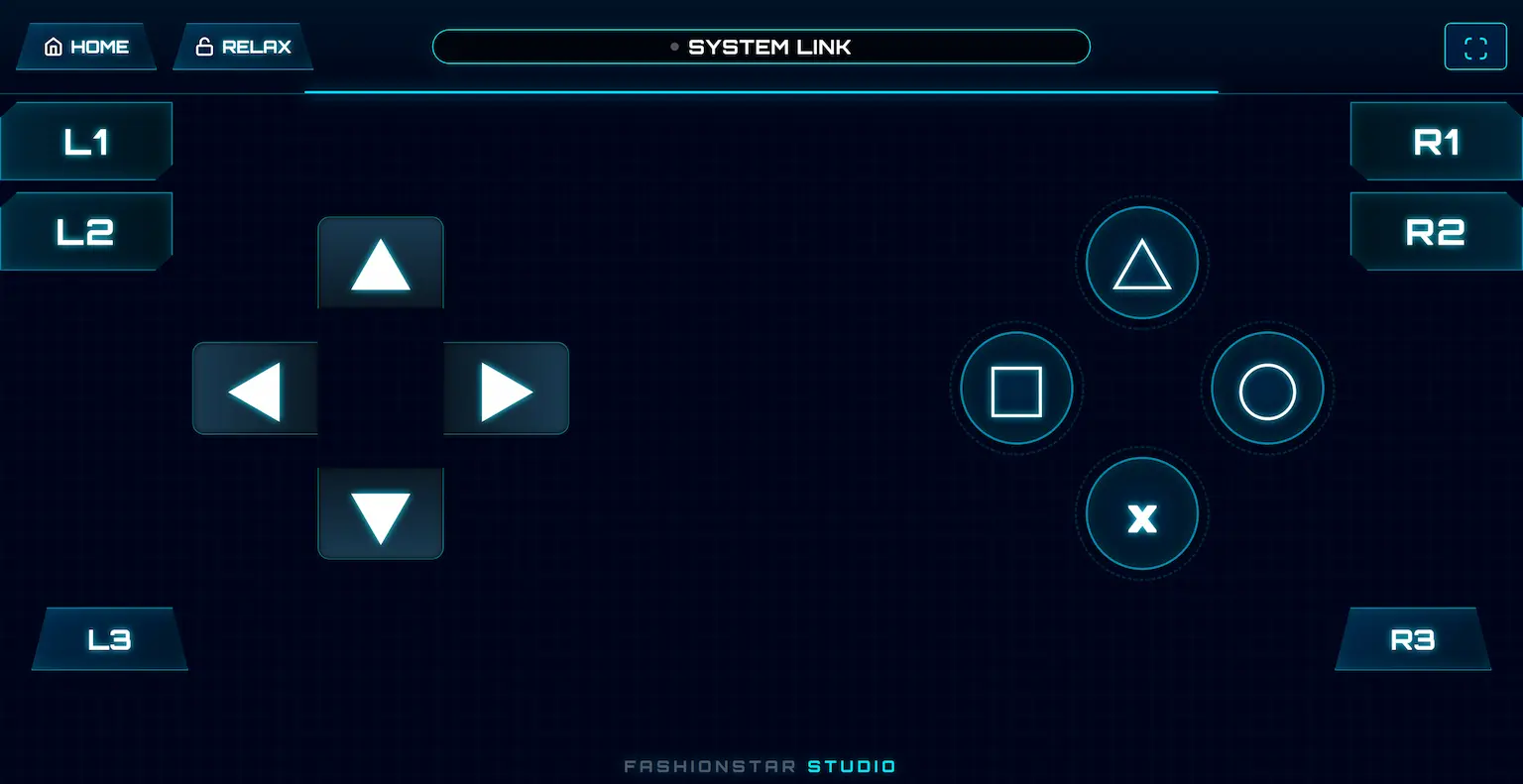
使用网页虚拟手柄,你可以在无需编写任何代码的情况下,快速教会机器人一个连续动作序列:
- 准备:点击左上角的 HOME 按钮,确保机器人处于标准初始站立姿态。
- 关节解锁:点击左上角的 RELAX 按钮,使机器人进入阻尼模式。此时所有舵机断电,你可以手动移动每个关节。
- 记录第一帧:手动摆出机器人的姿势,然后点击 Left ◀ 方向键记录当前姿态。
- 记录后续帧:继续改变机器人的姿态并再次点击 Left ◀。重复此过程以记录一系列动作帧;默认最多支持 100 帧。
- 播放动作序列:所有姿态记录完成后,点击 Right ▶ 方向键,机器人将平滑回放所有已记录动作。
- 调整播放速度:如果播放过快或过慢,可点击 Up ▲(加速)或 Down ▼(减速)来调整动作速度。
- 一键演示:点击右侧的 Square □ 按钮,可直接播放出厂默认演示动作。
如果你已经完成快速体验,并希望进一步导出动作 JSON、修改主控逻辑或连接其他控制器,请继续阅读后续章节。
9. 自定义动作开发核心流程
姿态设计与数据导出(Web 动作编辑器)
-
连接与读取:通过 PC 浏览器连接 RUC-01 接口板,实时读取机器人的舵机状态。
-
解锁与示教:一键让舵机断电进入阻尼模式,手动移动机器人,并记录每一帧姿态。
-
编排与微调:调整关键帧的执行时间和间隔,并在软件中实时回放以优化动作流畅度。
-
导出 JSON:确认动作无误后,将整个动作组导出为标准
.json文件。
数据集成与固件烧录(ESP32 主控制器)
- 开源项目:在 Arduino IDE 中打开随附的 ESP32 主控制器项目源码。
- 替换代码:完整复制导出的
.json数据,替换Robot.ino文件中现有的jsonData变量内容。 - 编译与烧录:重新编译项目,并将更新后的固件烧录到 ESP32S3 主控板。
无线遥控与触发执行(Web 远程终端)
- 无线连接:在手机上打开 Remote Controller 网页遥控,并与机器人配对。
- 一键触发:点击界面上的 Square □ 按钮(指令
0x10),机器人将在无需数据线的情况下自主连续执行新设计的动作序列。
动作编辑器使用指南
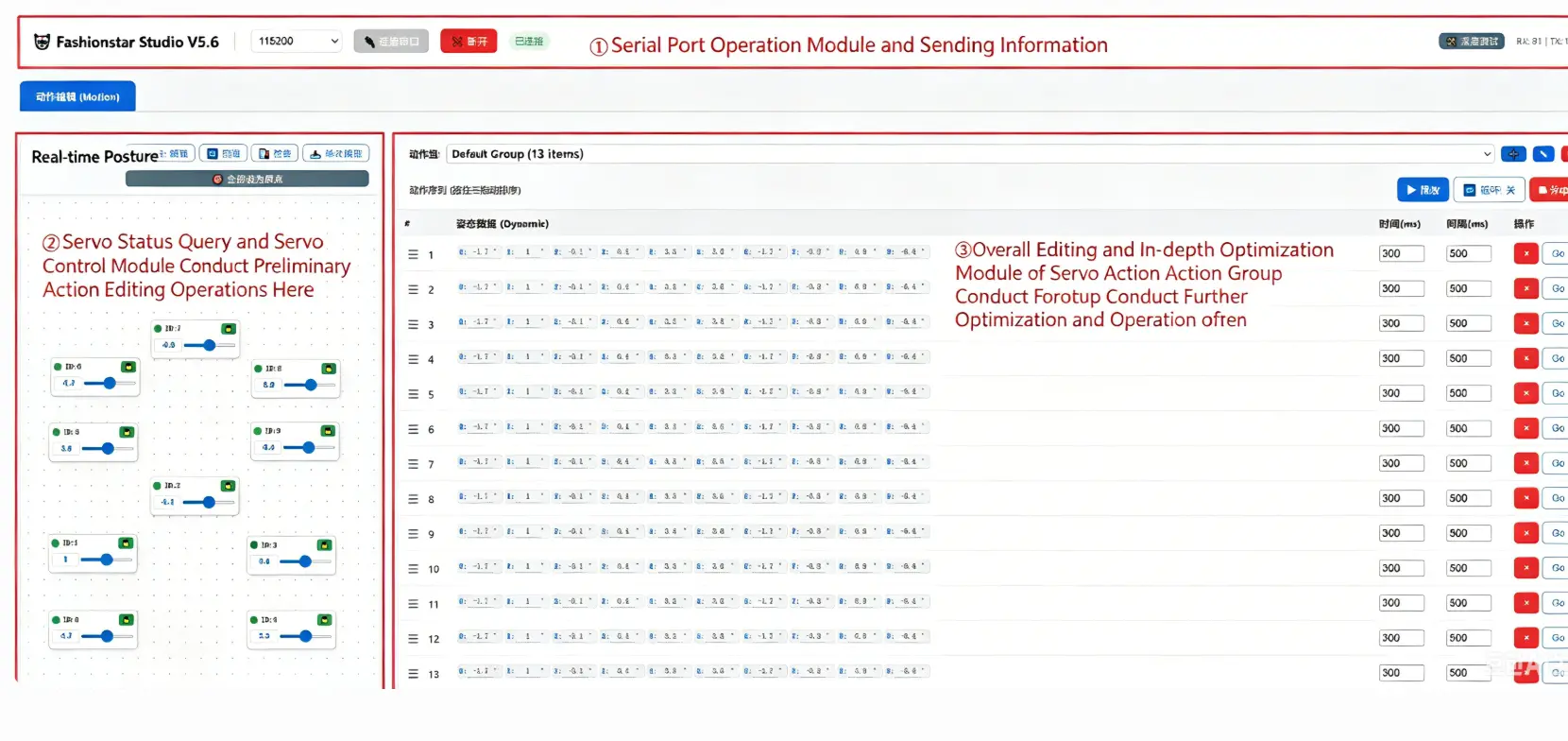
编辑器布局
三个主要模块:
- 串口连接 / 断开与消息状态
- 舵机状态 / 角度查询与控制
- 动作组优化与导入 / 导出
控制参考
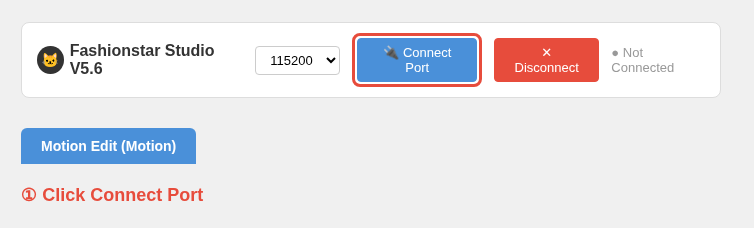
连接 / 断开串口

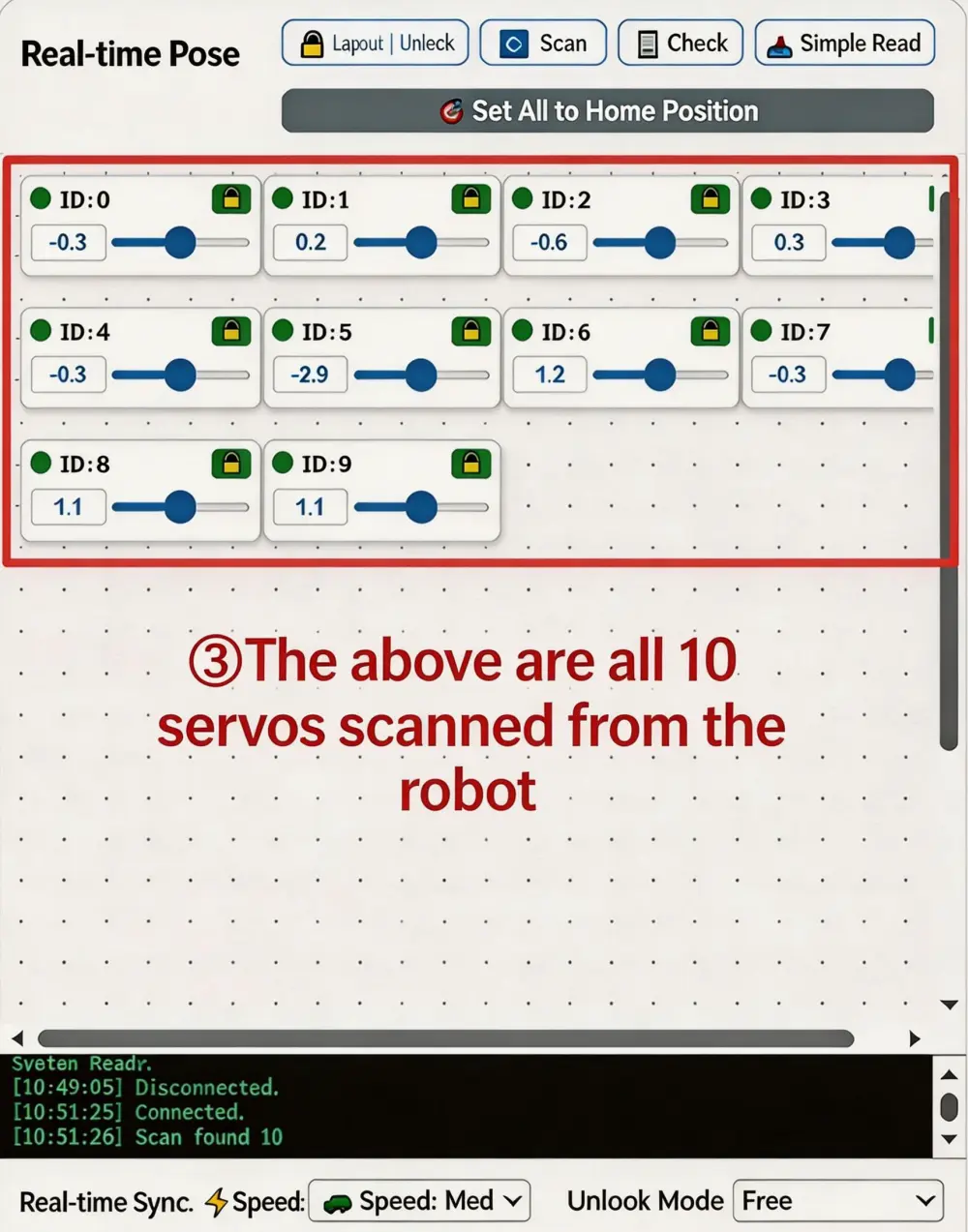
实时姿态页面
- 布局:在画布上拖动各个舵机控制以排布机器人部件;ID 一一对应;点击可锁定布局。
- 扫描:重新扫描所有在线舵机。
- 检查:过压 / 欠压保护、堵转及其他异常状态。
- 读取一次:读取当前角度一次。
- 状态颜色:绿色 = 角度控制;红色 = 释放 / 阻尼。

通过拖动进行角度控制:
- 实时读取:持续读取舵机角度。
- 速度:在拖动过程中限制速度,以避免动作过大。
- 解锁模式:释放舵机用于示教(断电释放 / 阻尼释放)。

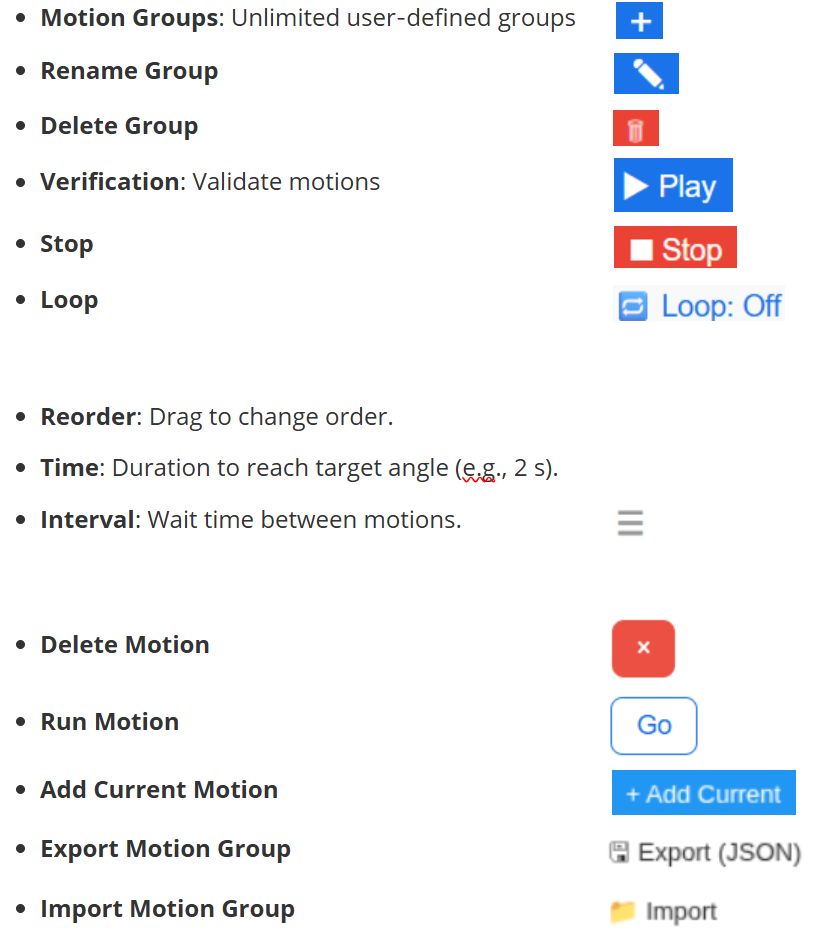
动作组页面
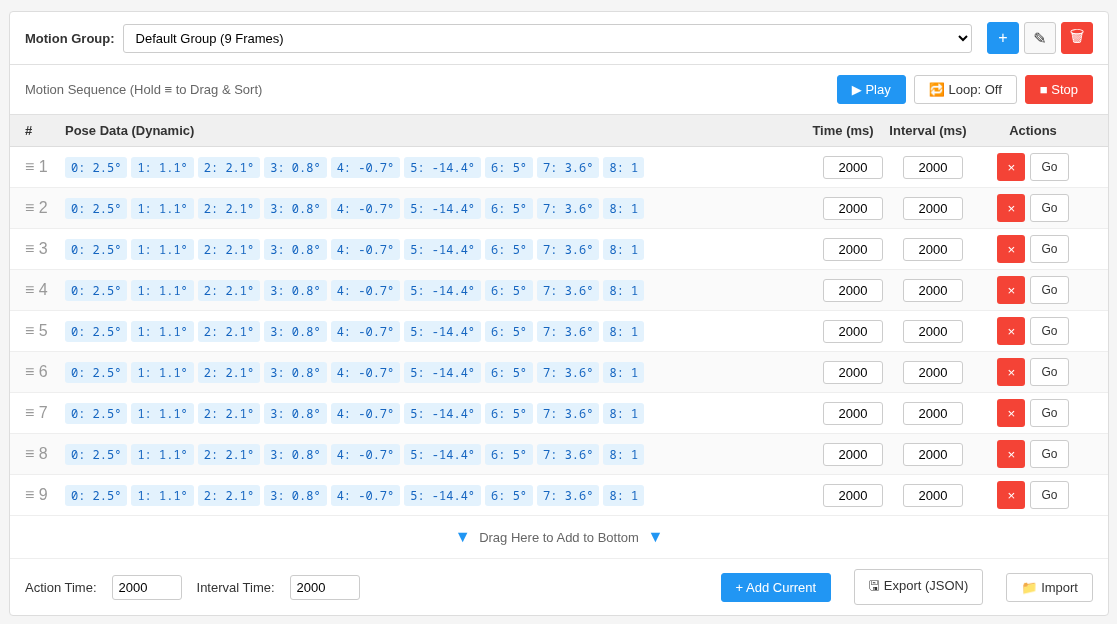
下面对各个按钮进行说明:
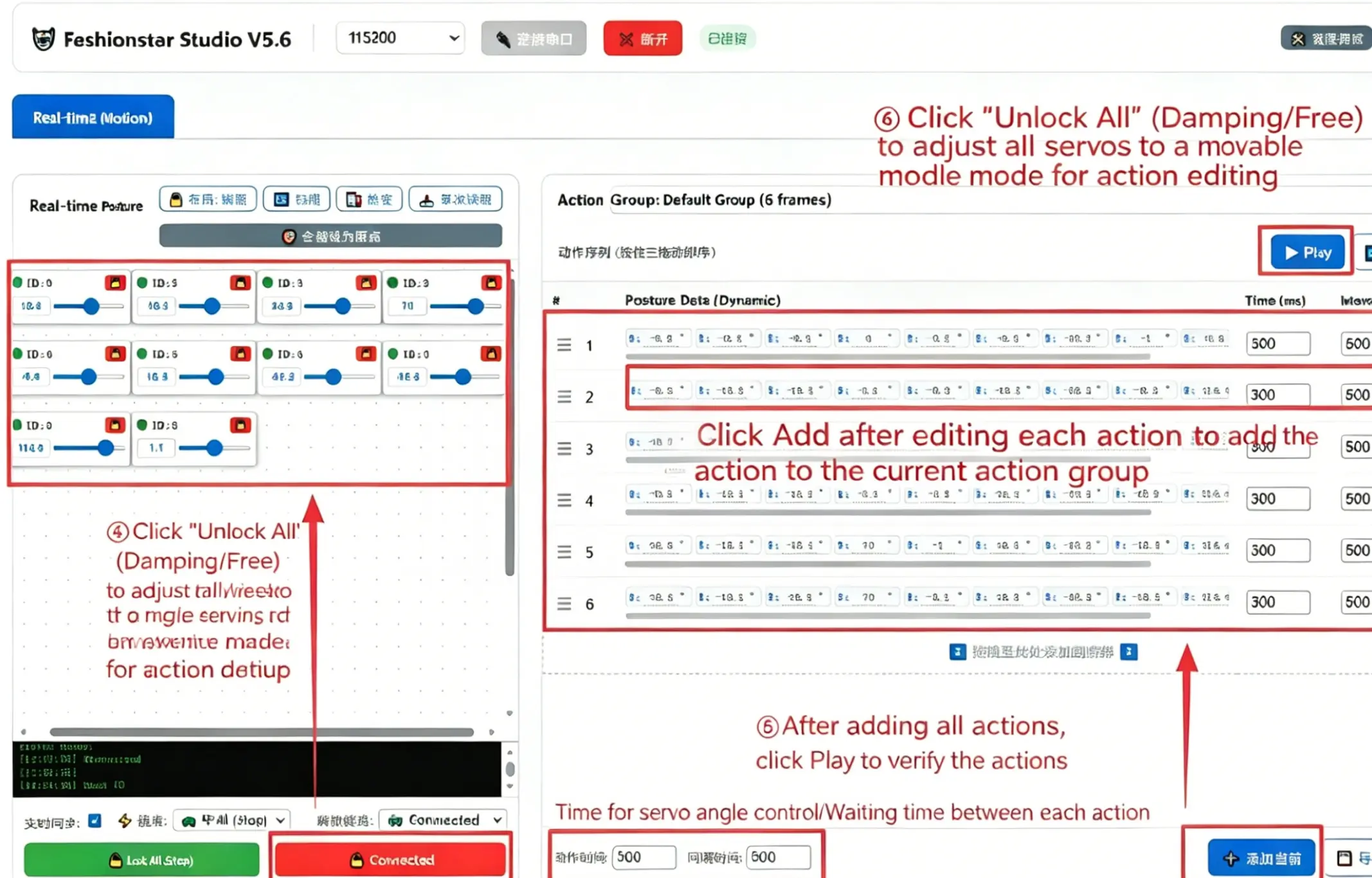
从编辑器到离线动作(XIAO ESP32S3 Sense)
- 1. 点击 "Connect" 打开串口。
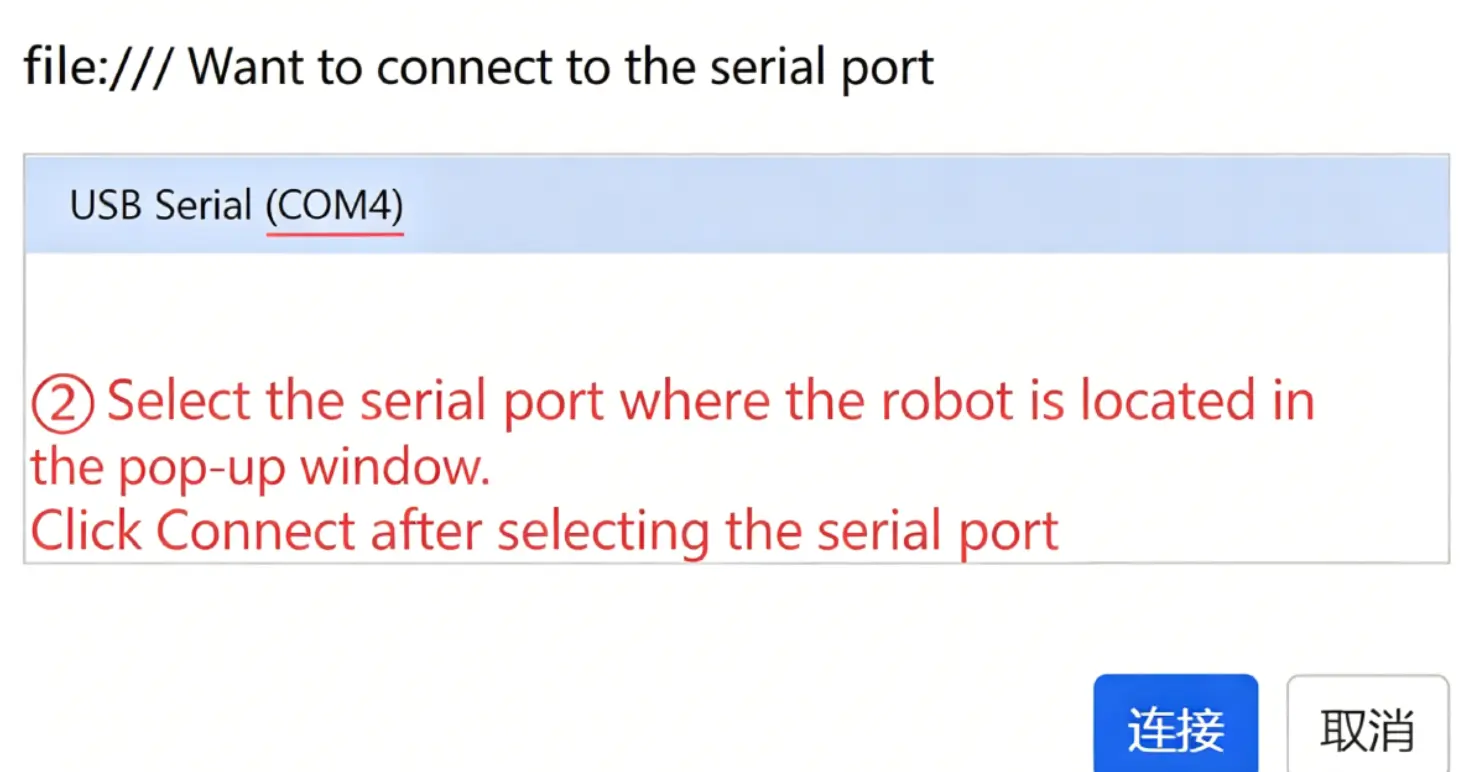
- 2. 选择目标串口。
- 3. 扫描机器人上的所有舵机。
- 4. 点击 "Release All" 使所有舵机断电以便手动定位,或只解锁你需要的舵机。
- 5. 设置 "Time" 和 "Interval"。
- 6. 每次编辑后,点击 "Add Current" 将其追加到动作组中。
- 7. 播放以进行验证。
注意
每一帧动作都可以单独编辑(角度、时间、间隔)并进行验证。
- 8. 点击 "Export (JSON)" 导出动作组。
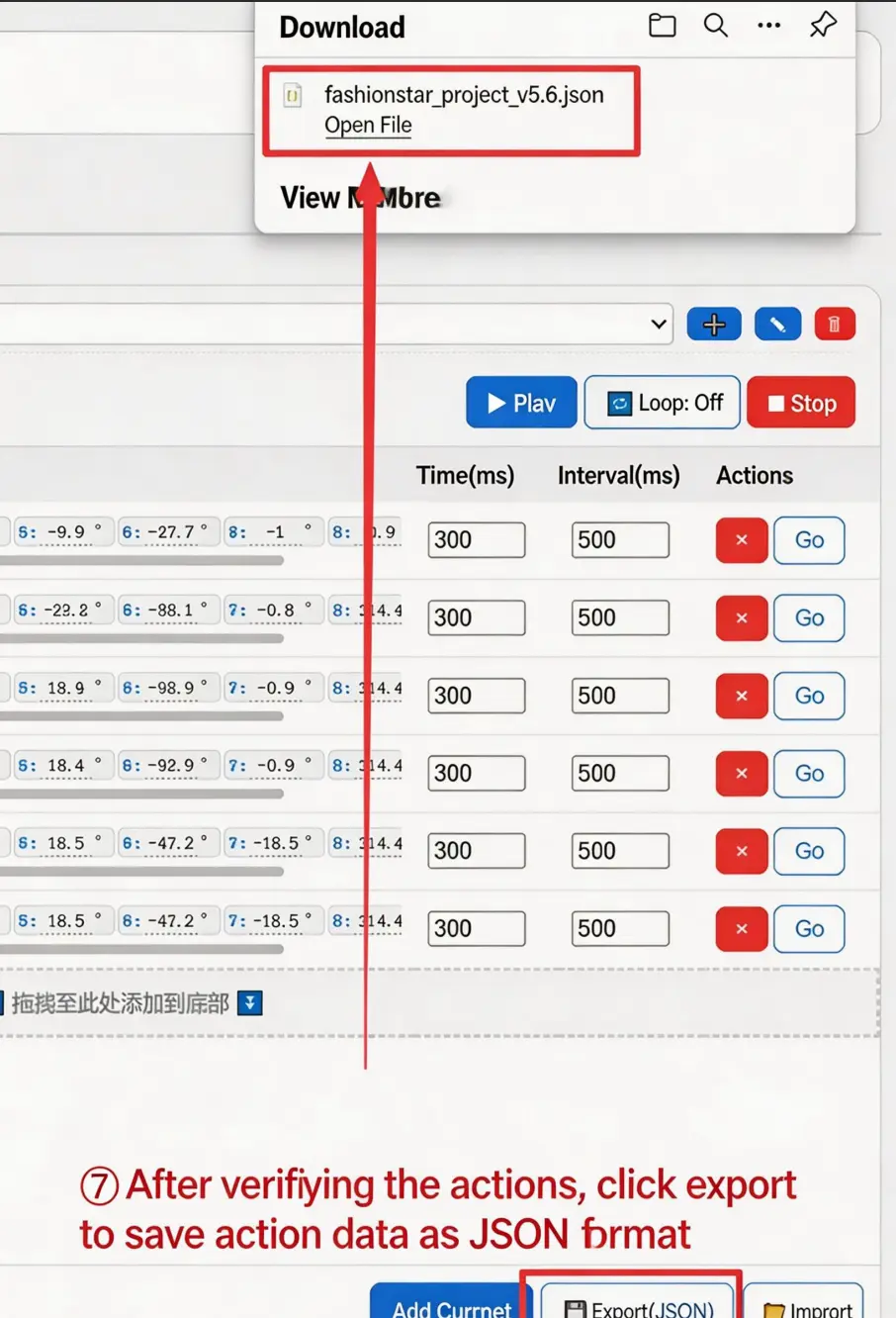
- 9. 打开导出的 JSON,并复制
frames的内容(包括外层的[])。
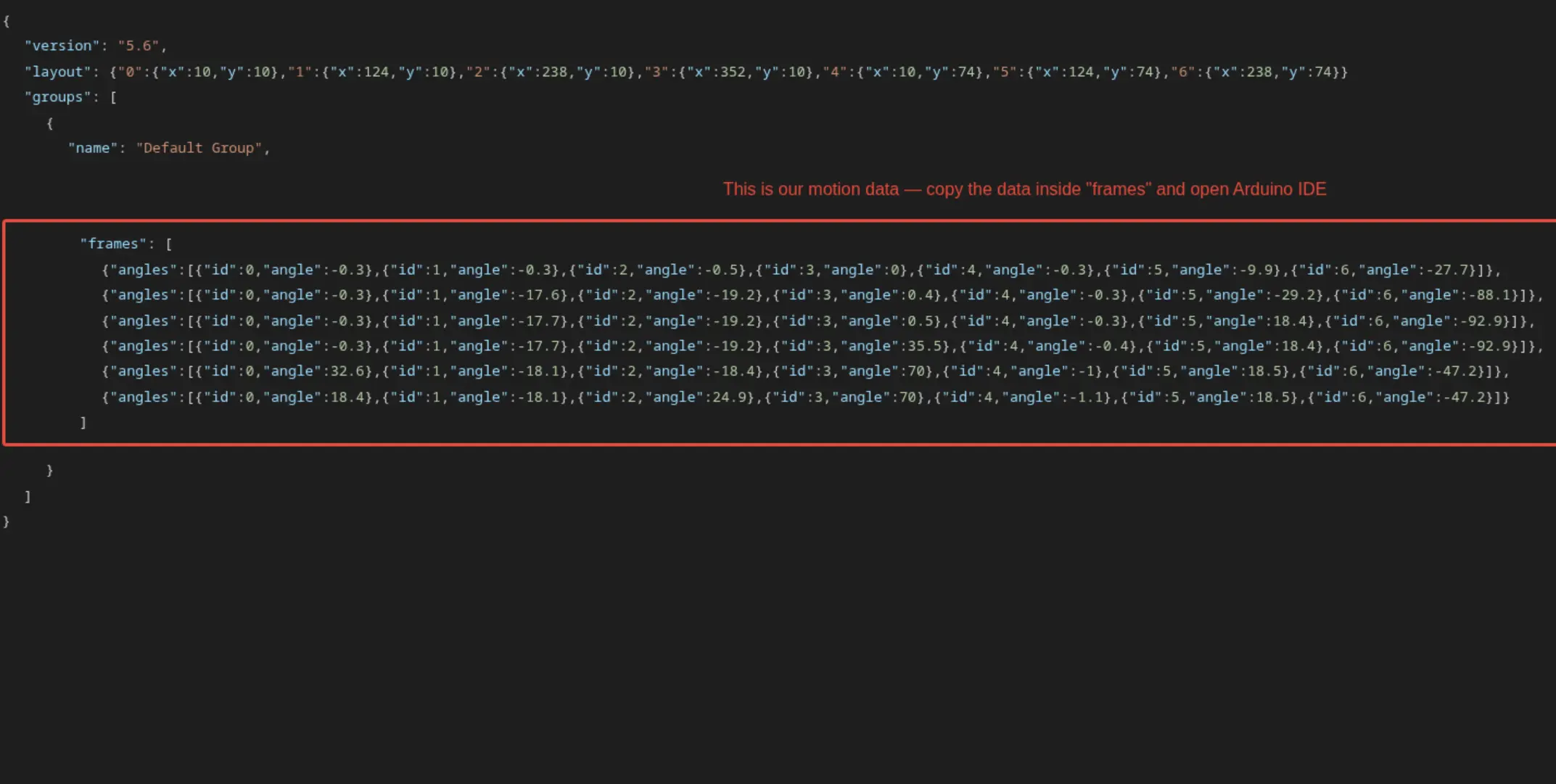
- 10. 将程序中的
jsonData替换为复制的内容;编译并烧录后,即可通过蓝牙手柄控制机器人(详见“机器人控制参数”)。
机器人控制参数(按需调整)
默认值
BAUDRATE:UART 波特率。SERVO_NUM:舵机数量。
#define BAUDRATE 115200 /* Baud rate */
#define SERVO_NUM 10 /* Total number of servos */
蓝牙(如使用)
BLE_NAME:手柄名称。BLE_UUID:手柄 UUID。
/* Bluetooth settings -- modify according to actual conditions */
#define BLE_NAME "LOOKBON" /* Bluetooth name */
#define BLE_UUID "AE02" /* ID for Bluetooth data reception */
Web 远程(如使用)
SERVICE_UUID:服务 ID。CHARACTERSTIC_UUID:特征 ID。
/* ESP32 Service UUID and Characteristic UUID */
#define SERVICE_UUID "4fafc201-1fb5-459e-8fcc-c5c9c331914b"
#define CHARACTERISTIC_UUID "beb5483e-36e1-4688-b7f5-ea07361b26a8"
示教模式
MAX_ACTIONNUM:示教模式下允许的最大动作帧数。Default_RobotRunSpeed_Demonstration:默认运行速度。MIN_RobotRunSpeed_Demonstration:最慢运行速度。MAX_RobotRunSpeed_Demonstration:最快运行速度。Adjust_RobotRunSpeed_Step:示教模式下的速度调节步进值(每步 ±200)。
#define MAX_ACTIONNUM 100 /* Maximum number of teaching motion frames */
#define Default_RobotRunSpeed_Demonstration 1000 /* "Default" teaching run speed */
#define MIN_RobotRunSpeed_Demonstration 5000 /* "Slowest" teaching run speed */
#define MAX_RobotRunSpeed_Demonstration 500 /* "Fastest" teaching run speed */
#define Adjust_RobotRunSpeed_Step 200 /* Step value for adjusting teaching run speed */
数据字段(按需自定义)
RemoteControl_DefaultDemoAction:默认演示动作(由编辑器导出)。RemoteControl_Exe:示教模式执行命令。RemoteControl_Record:示教模式记录命令。RemoteControl_Damping:阻尼模式命令。RemoteControl_Reset:复位命令。RemoteControl_ReduceRunSpeed:降低示教模式运行速度。RemoteControl_AddRunSpeed:提高示教模式运行速度。
蓝牙说明:实际控制器数据取决于你的设备,请在代码中按需定义各个按键。
/* Bluetooth remote control commands -- modify functions according to different commands -- adjust based on actual conditions */
#define RemoteControl_DefaultDemoAction 0xA1 /* Default demonstration motion */
#define RemoteControl_Exe 0xA2 /* Teaching mode execution command */
#define RemoteControl_Record 0xA3 /* Record motion command */
#define RemoteControl_Damping 0xA4 /* Damping mode command */
#define RemoteControl_Reset 0xA5 /* Robot reset command */
#define RemoteControl_ReduceRunSpeed 0xA6 /* Decrease teaching run speed */
#define RemoteControl_AddRunSpeed 0xA7 /* Increase teaching run speed */
Web 远程注意事项:同样,请在集成前确认数据和按键映射。
/* Web remote control commands -- modify functions according to different commands -- adjust based on actual conditions */
#define RemoteControl_DefaultDemoAction 0x10 /* Default demonstration motion */
#define RemoteControl_Exe 0x08 /* Teaching mode execution command */
#define RemoteControl_Record 0x04 /* Record motion command */
#define RemoteControl_ReduceRunSpeed 0x02 /* Decrease teaching run speed */
#define RemoteControl_AddRunSpeed 0x01 /* Increase teaching run speed */
#define RemoteControl_Damping 0x04 /* Damping mode command */
#define RemoteControl_Reset 0x08 /* Robot reset command */
复位角度
ROBOT_RESET_POSITION_0~ROBOT_RESET_POSITION_9:舵机 ID 0–9 的零位(机器人复位姿态)。
注意:请根据你机器人的复位姿态修改这些参数。
/* Robot reset angle settings -- modify according to actual conditions */
constexpr float ROBOT_RESET_POSITION_0 = 0;
constexpr float ROBOT_RESET_POSITION_1 = 0;
constexpr float ROBOT_RESET_POSITION_2 = 0;
constexpr float ROBOT_RESET_POSITION_3 = 0;
constexpr float ROBOT_RESET_POSITION_4 = 0;
constexpr float ROBOT_RESET_POSITION_5 = 0;
constexpr float ROBOT_RESET_POSITION_6 = 0;
constexpr float ROBOT_RESET_POSITION_7 = 0;
constexpr float ROBOT_RESET_POSITION_8 = 0;
constexpr float ROBOT_RESET_POSITION_9 = 0;
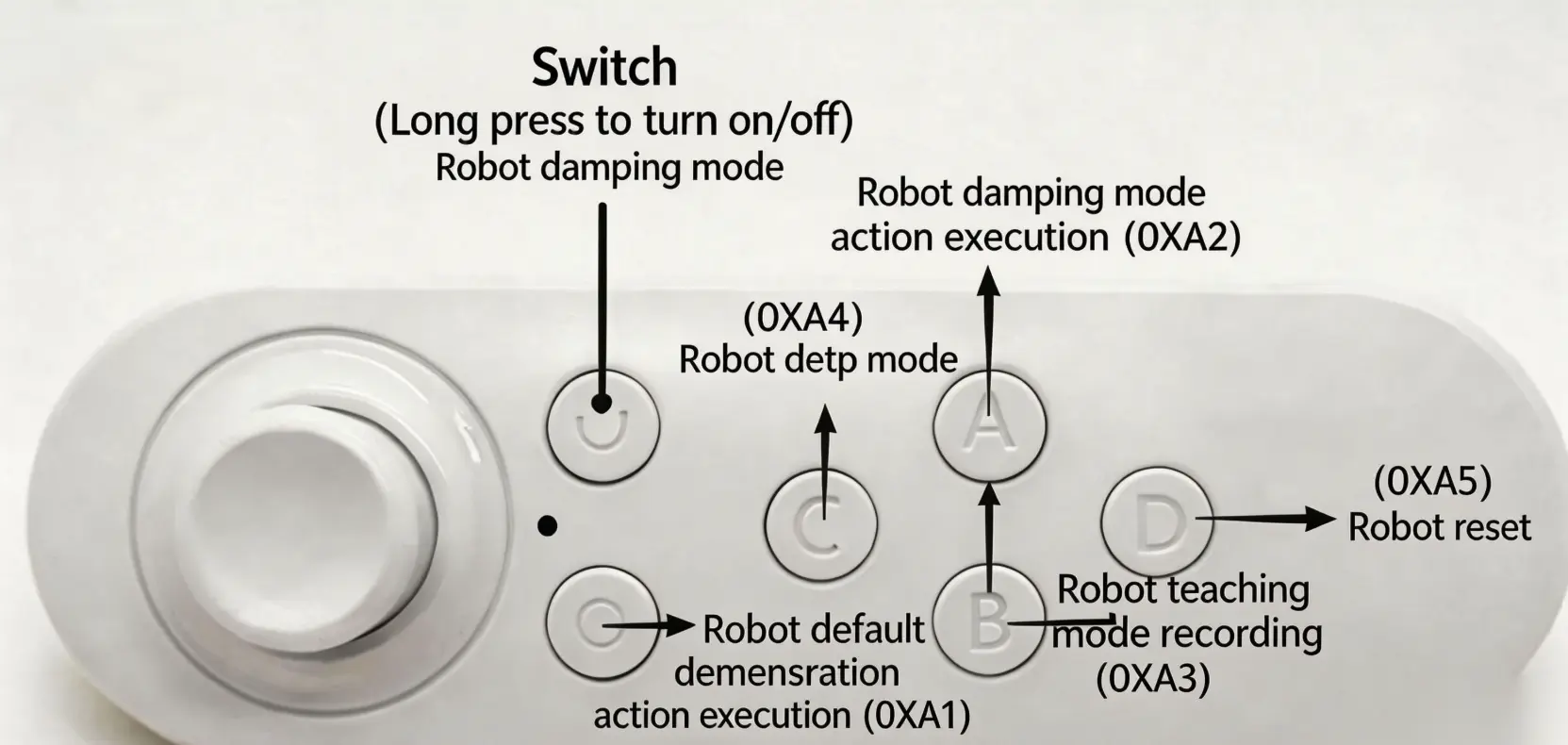
遥控参考
蓝牙手柄
- 长按手柄电源键开机,并与 MCU(XIAO_ESP32S3)配对。
- 配对成功后,机器人会鞠躬并复位。
动作功能:
- “Run Motion”:执行内置动作。
- “Reset Robot”:回到复位姿态。
- “Damping Mode”:进入可自由拖动关节的示教状态。
- “Record Teaching Motion”:记录当前动作。
- “Execute Teaching Motion”:运行已记录的动作(默认不会清除)。
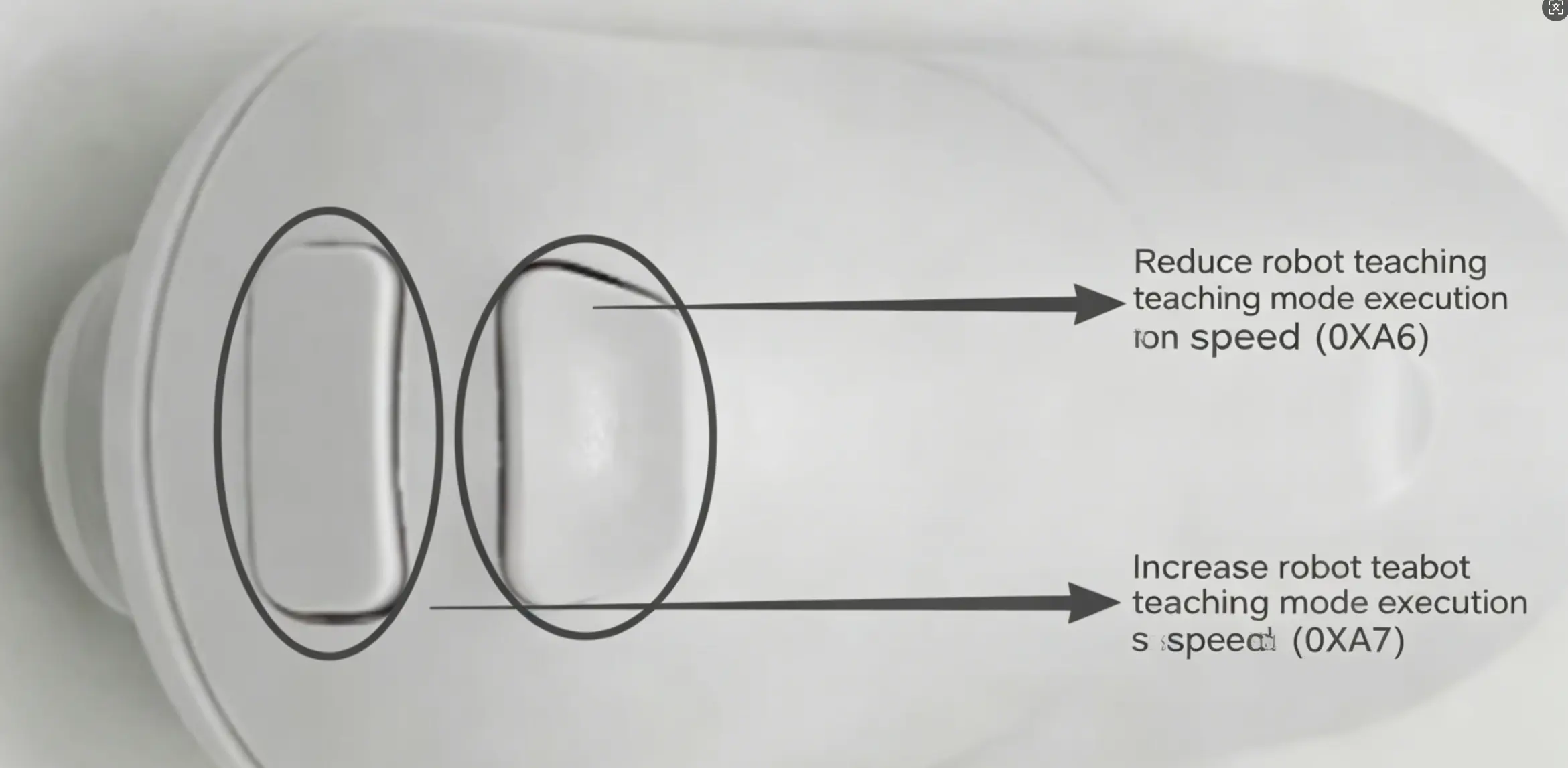
- “Decrease Teaching Speed”:降低运行速度(右臂舵机 ID 6 摆动以指示速度)。
- “Increase Teaching Speed”:提高运行速度(右臂舵机 ID 6 摆动以指示速度)。
10. 标准主控固件烧录指南(基于 Seeed Studio XIAO ESP32S3)
本章节仅适用于标准 XIAO ESP32S3 主控环境。如果你的项目使用 STM32 或 Raspberry Pi,请直接参考附录中的多平台 Fashionstar 舵机控制 SDK。
开发环境搭建(Arduino IDE)
从 Arduino 官方网站下载并安装最新的 Arduino IDE,推荐使用 Arduino IDE 2.x。
导入 ESP32 硬件支持包
首先,打开 Arduino IDE 的首选项:
- Windows:
File > Preferences - macOS:
Arduino IDE > Settings...或Preferences...
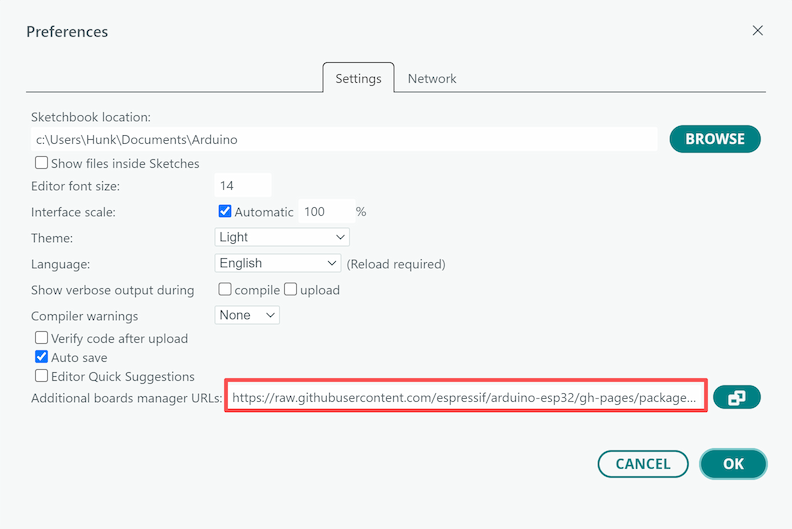
在 “Additional Boards Manager URLs” 中输入以下 URL:
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json
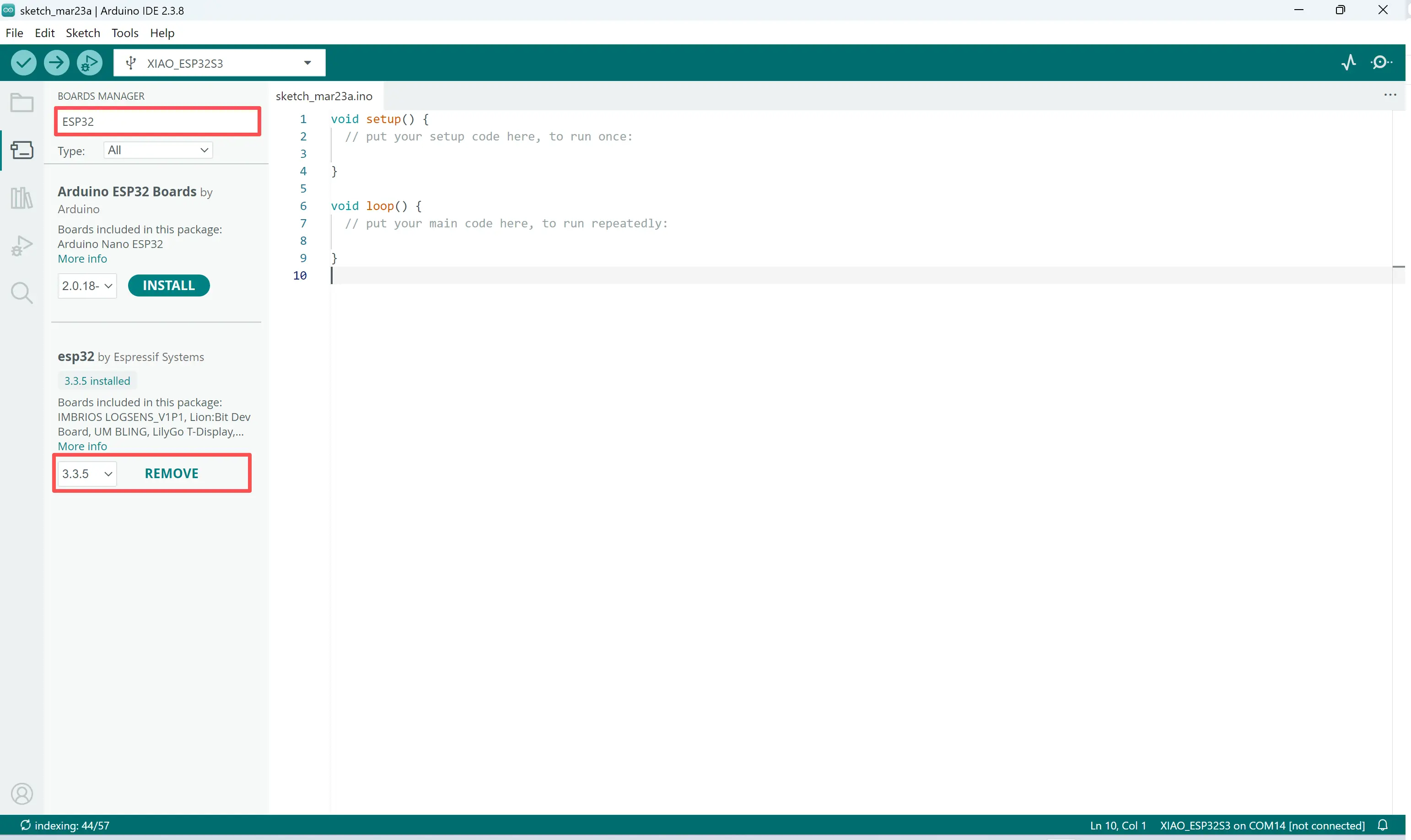
部署 ESP32 编译环境(严格版本要求)
- 打开
Tools > Board > Boards Manager - 搜索
esp32 - 找到由
Espressif Systems提供的包 - 手动选择并安装 3.3.5 版本
请不要直接安装最新版本。当前项目的蓝牙与总线驱动组合要求使用 3.3.5 版本,否则蓝牙或总线通信可能无法编译或运行异常。
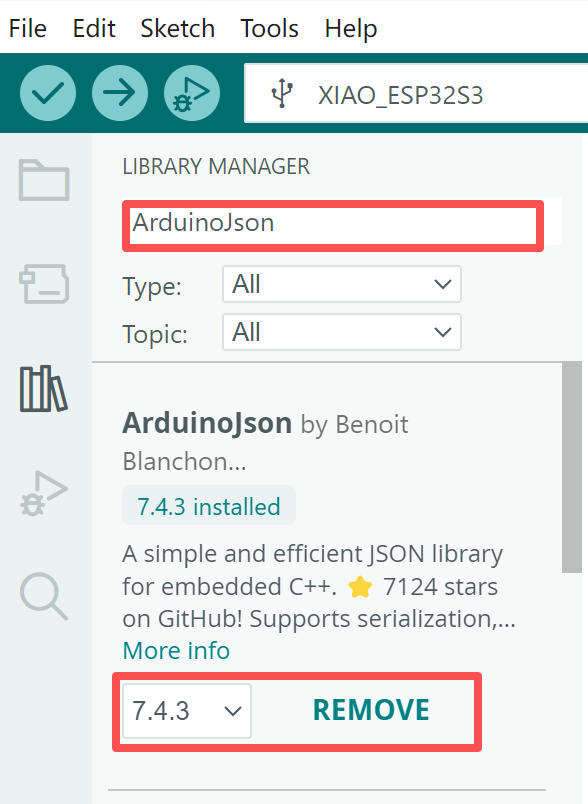
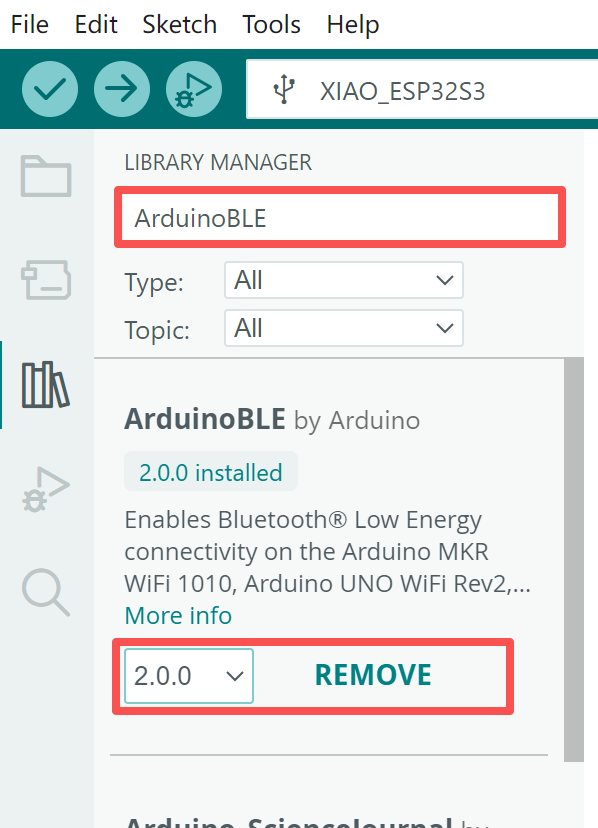
安装所需库(ArduinoJson 和 ArduinoBLE)
系统依赖以下第三方库进行 JSON 解析和蓝牙服务:
ArduinoJsonArduinoBLE
安装方法:
- 打开
Sketch > Include Library > Manage Libraries... - 搜索并安装
ArduinoJson - 搜索并安装
ArduinoBLE
部署 Fashion Star 舵机核心驱动 SDK
为确保底层驱动正确调用,需要手动安装官方 SDK:
- 在随附资料包中找到
fashionstar-uart-servo-arduino-sdk-V2.rar - 解压压缩包
- 将整个 SDK 文件夹复制到 Arduino 默认库目录
默认库路径:
- Windows:
C:\Users\Username\Documents\Arduino\libraries - macOS:
~/Documents/Arduino/libraries
复制完成后,完全关闭并重新打开 Arduino IDE,以便重新加载本地库。
选择开发板并编译 / 烧录
- 使用 Type-C 数据线将 XIAO ESP32S3 连接到电脑
- 打开
Tools > Board > esp32并选择XIAO_ESP32S3 - 打开
Tools > Port并选择对应主控板的端口
端口名称通常为:
- Windows:
COM3、COM5等 - macOS:
/dev/cu.usbmodem...或/dev/cu.usbserial...
最后,在 Arduino IDE 中打开项目源码(.ino),点击左上角的 Upload 按钮,等待控制台显示 “Upload successful”。
11. 底层控制参数配置规范(基于标准主控 Seeed Studio XIAO ESP32S3)
在 Arduino IDE 中打开项目源码后,可根据实际项目需求修改以下宏定义和常量。请确认每个参数所在的文件,避免误改。
基础硬件参数
位于 Control.h
BAUDRATE:主控与 RUC-01 通信的串口波特率SERVO_NUM:机器人舵机总数
/* User-modifiable robot data area */
/* define */
#define BAUDRATE 115200 /* Baud rate */
#define SERVO_NUM 10 /* Total number of servos */
UART 物理引脚重映射
位于 Robot.ino
TX_PIN/RX_PIN:ESP32S3 与 RUC-01 转接板通信所使用的串口引脚
/* Serial1 -- GPIO D6 = GPIO43 D7 = GPIO44 */
#define TX_PIN 43
#define RX_PIN 44
Web 远程蓝牙通信参数
位于 Robot.ino 和 Control.h
BLE_NAME:蓝牙广播名称SERVICE_UUID/CHARACTERISTIC_UUID:Web 远程与主控建立通信所依赖的服务 UUID 和特征 UUID
/* Set Bluetooth name */
BLE.setLocalName("ESP32_Pro_Remote");
/* ESP32 Service UUID and Characteristic UUID */
#define SERVICE_UUID "4fafc201-1fb5-459e-8fcc-c5c9c331914b"
#define CHARACTERISTIC_UUID "beb5483e-36e1-4688-b7f5-ea07361b26a8"
示教模式参数参考
位于 Control.h
MAX_ACTIONNUM:示教模式下可记录的最大动作帧数Default_RobotRunSpeed_Demonstration:默认运行速度MIN / MAX_RobotRunSpeed_Demonstration:速度调节的上下限Adjust_RobotRunSpeed_Step:每次加减速的步进值
#define MAX_ACTIONNUM 100 /* Maximum number of teaching motion frames */
#define Default_RobotRunSpeed_Demonstration 1000 /* "Default" teaching run speed */
#define MIN_RobotRunSpeed_Demonstration 5000 /* "Slowest" teaching run speed */
#define MAX_RobotRunSpeed_Demonstration 500 /* "Fastest" teaching run speed */
#define Adjust_RobotRunSpeed_Step 200 /* Step value for adjusting teaching run speed */
按键数据与命令宏定义
位于 Control.h
在无线遥控通信中,Web 远程会将按键状态打包到两个独立变量中:
btn_Main:主操作区按键btn_border:系统控制区按键
因此,一些十六进制命令可能会在两个区域中都出现,但它们对应的是不同的变量,不会产生冲突。
/* Bluetooth remote control commands -- modify functions according to different commands -- adjust based on actual conditions */
/* The following commands correspond to btn_Main (red hexadecimal labels in the mapping diagram) */
#define RemoteControl_DefaultDemoAction 0x10 /* Default demonstration motion command (Square button) */
#define RemoteControl_Exe 0x08 /* Teaching mode execution command (D-pad Right) */
#define RemoteControl_Record 0x04 /* Record motion frame command (D-pad Left) */
#define RemoteControl_ReduceRunSpeed 0x02 /* Decrease teaching run speed (D-pad Down) */
#define RemoteControl_AddRunSpeed 0x01 /* Increase teaching run speed (D-pad Up) */
/* The following commands correspond to btn_border (yellow hexadecimal labels in the mapping diagram) */
#define RemoteControl_Damping 0x04 /* Damping / release mode command (RELAX button) */
#define RemoteControl_Reset 0x08 /* Robot reset command (HOME button) */
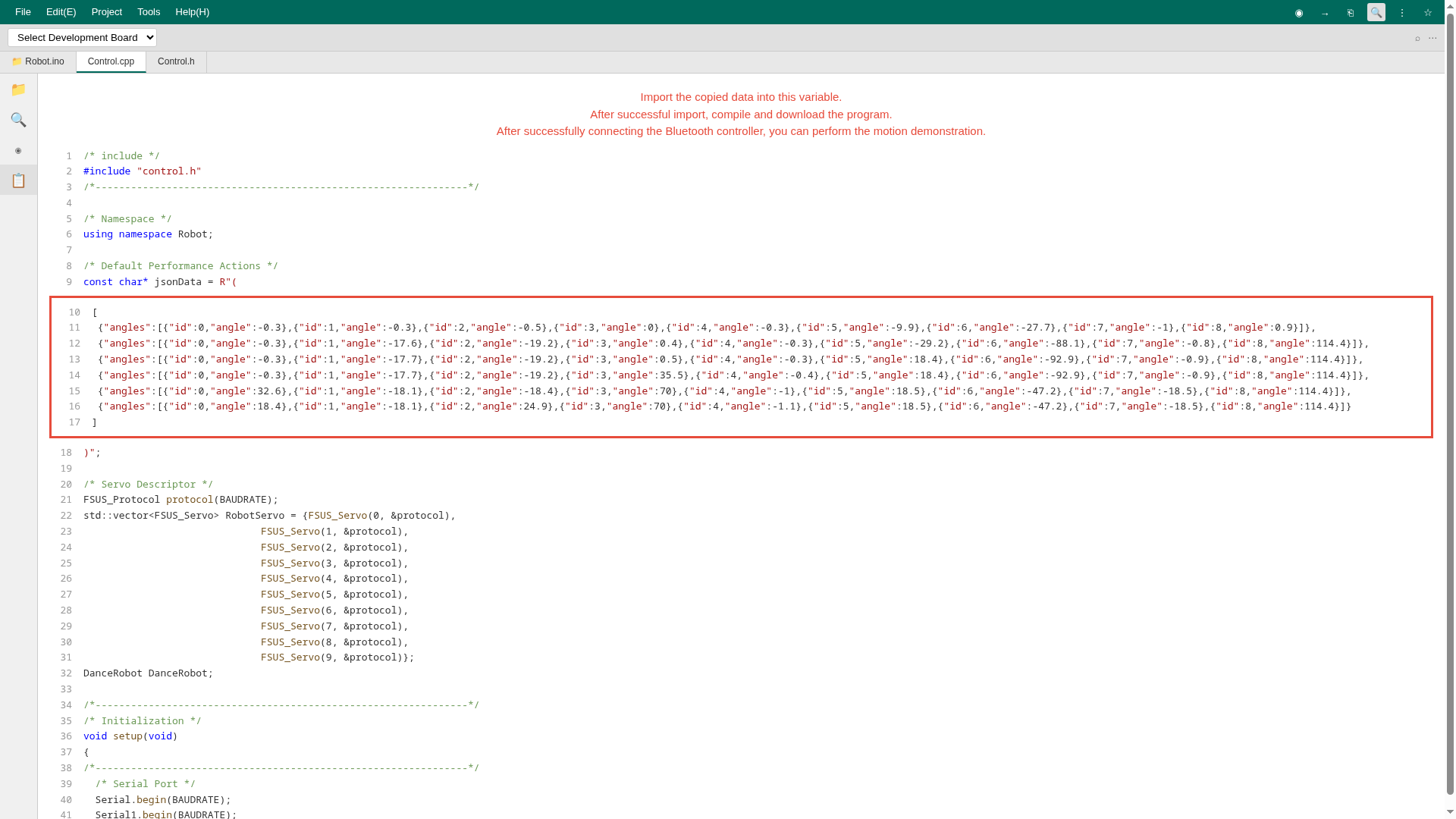
动作组数据挂载区
位于 Robot.ino
将从动作编辑器导出的 .json 数据复制到 jsonData 变量中,保留 R( 和 );`:
/* Default demonstration motion */
const char* jsonData = R"(
[
// Paste the JSON data exported from the motion editor here, completely replacing this section
{"angles":[{"id":0,"angle":0},{"id":1,"angle":0} ... ],"time":2000,"delay":500}
]
)";
JSON 缓冲区分配大小
位于 Control.cpp
如果动作序列过长,可能会导致运行时内存不足或 JSON 解析失败。此时可以适当增大 DynamicJsonDocument 的容量:
/* Create a JSON document object with sufficient space allocated */
DynamicJsonDocument doc(4096);
根据动作复杂度需要,将其增加到 8192 或更高。
机器人复位角度参数与零点补偿
位于 Control.h
ROBOT_RESET_POSITION_0 ~ 9:分别对应舵机 ID 0 到 9 的零初始角度
由于机械装配公差的存在,每台机器人的绝对零位可能略有差异。建议在确认机器人站立姿态后,对这些参数进行微调和补偿。
/* Robot reset angle settings -- modify according to actual conditions */
constexpr float ROBOT_RESET_POSITION_0 = 0;
constexpr float ROBOT_RESET_POSITION_1 = 0;
constexpr float ROBOT_RESET_POSITION_2 = 0;
constexpr float ROBOT_RESET_POSITION_3 = 0;
constexpr float ROBOT_RESET_POSITION_4 = 0;
constexpr float ROBOT_RESET_POSITION_5 = 0;
constexpr float ROBOT_RESET_POSITION_6 = 90;
constexpr float ROBOT_RESET_POSITION_7 = 0;
constexpr float ROBOT_RESET_POSITION_8 = -90;
constexpr float ROBOT_RESET_POSITION_9 = 0;
12. Web 远程终端功能字典与底层映射
关于浏览器兼容性和基础蓝牙配对步骤,请先参考本文档第 2 章。本章主要说明控制界面中的按键布局以及底层十六进制映射关系,以便后续进行二次开发。
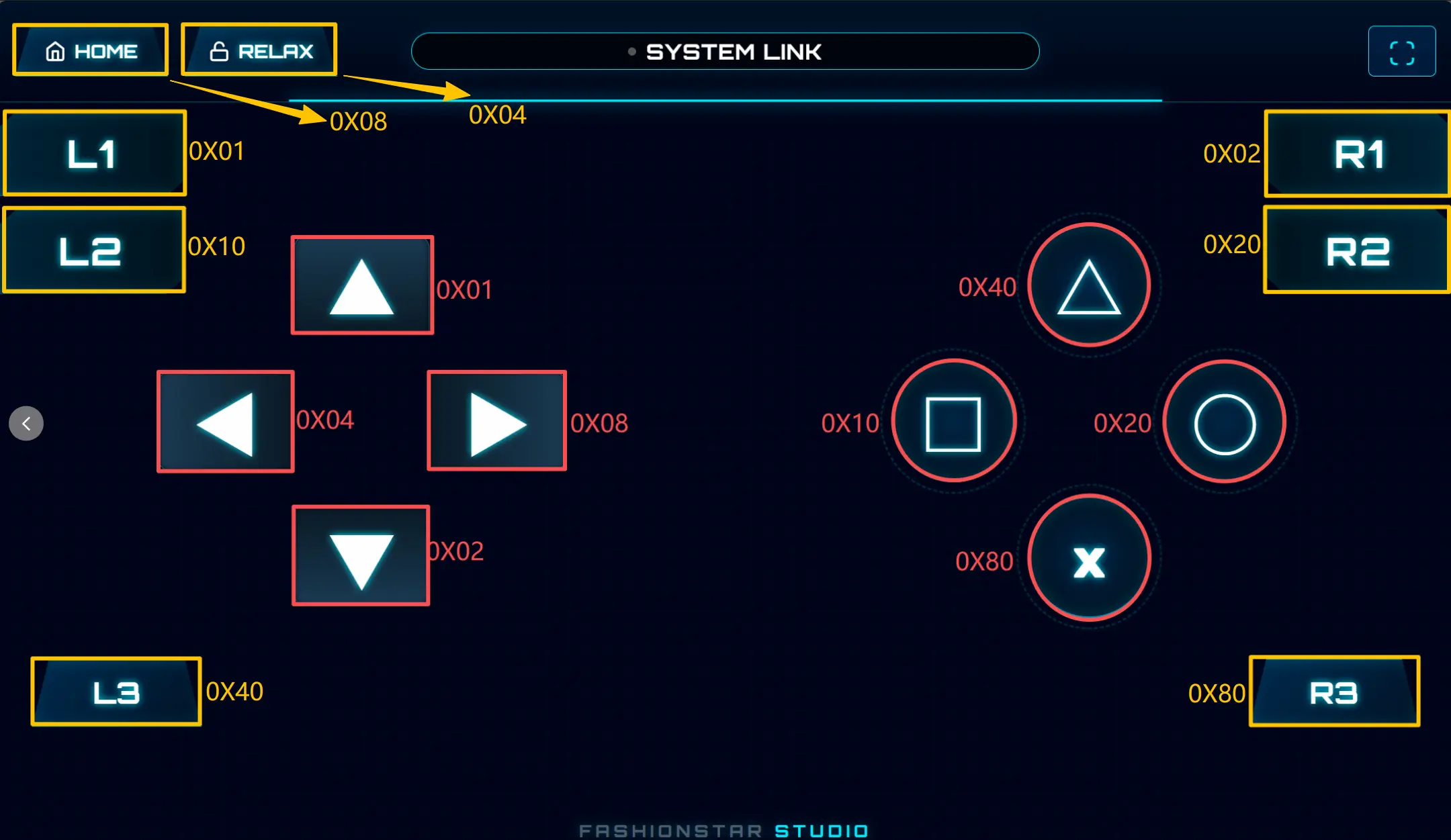
系统控制区域
对应代码变量:btn_border
该区域主要位于界面顶部和边缘,用于控制机器人的全局状态:
- HOME (
0x08):中断当前动作,使机器人恢复到默认标定站立姿态,并清除当前内存中的示教数据 - RELAX (
0x04):进入阻尼 / 释放模式,释放所有舵机的保持力矩,便于手动示教 - 其他黄色标注按键:如
L1、L2、R1、R2、L3、R3等,在当前出厂演示程序中未分配任何动作,可由开发者按需扩展
主操作区域
对应代码变量:btn_Main
主操作区域包含方向键和右侧功能键,主要负责动作编排与执行:
- 方向键左 ◀ (
0x04):记录当前动作帧 - 方向键右 ▶ (
0x08):回放当前已记录的动作序列 - 方向键上 ▲ (
0x01):提高运行速度 - 方向键下 ▼ (
0x02):降低运行速度 - 方块键 □ (
0x10):执行主控 Flash 中预存的默认jsonData动作 - 其他红色标注按键:如
△、○、×等,在当前固件中未定义,可在底层代码中按需映射
常见问题解答(FAQ)
源网站页面正在建设中;内容将在可用时补充。
常见问答
Q1: Atom-S 应该使用什么电池?
A:推荐使用带 XT60 接头的标准 2S 或 3S 锂聚合物(Li-Po)电池。
Q2: 能否用其他主控替换 XIAO ESP32-S3?
A:本设计针对 XIAO ESP32-S3 做了优化,但任何具有足够 GPIO 的 ESP32 开发板,只需做少量修改也可以使用。
Q3: 如何更新固件?
A:通过 USB 将 XIAO ESP32-S3 连接到电脑,打开 Arduino IDE 或 PlatformIO,然后上传新程序。
Q4: 动作编辑器在哪里?
A:Web 动作编辑器可通过浏览器访问。详细操作请参考第 7.1 章。
常见故障排查
固件烧录无响应 / 卡死
- 现象:Arduino IDE 报告
A fatal error occurred: Failed to connect,或上传过程卡住 - 解决方法:
- 保持 USB 线连接
- 长按开发板上的 BOOT 按钮
- 在 IDE 中点击 Upload 按钮
- 当控制台显示
Connecting...或开始显示传输进度时松开 BOOT 按钮
Web 终端无法枚举蓝牙设备
- 现象:点击 "Find Device" 后,蓝牙设备列表为空
- 排查步骤:
- 确认正在使用支持
Web Bluetooth API的浏览器 - Windows 用户:确认操作系统版本至少为 Win10(1703+)
- macOS 用户:检查系统“隐私与安全性”设置,确保已授予浏览器蓝牙权限
- 确认正在使用支持
关节无力 / 无法保持姿态
- 现象:固件运行正常且已建立通信,但机器人无法有效支撑负载
- 排查步骤:
- 检查 3S 电池的充放电能力是否充足
- 检查总线接线是否松动或反接
- 如更换过舵机,确认全部 10 个舵机 ID(0–9)与项目定义一致,避免 ID 冲突