Atom-X 入门指南
介绍
Atom X 是一款开源的 17 自由度(DOF)双足人形机器人套件,面向机器人开发者、创客和教育机构。机器人由 17 个 Fashionstar RA8-U25H-M 总线舵机驱动,采用完全 3D 打印的开源结构设计。其核心搭载 Seeed Studio XIAO ESP32-S3 主控板和 Grove 扩展板,出厂已预装完整控制固件。其 Web 可视化动作编辑器支持基于浏览器的实时调试、示教编程以及 JSON 导出,便于跨平台二次开发。配套的 RUC-01 转接板提供稳压电源和 UART 接口,并支持蓝牙 / Web 远程控制。开箱即用,是运动算法验证和桌面机器人开发的理想平台。

1. 产品介绍
- 自由度配置:共 17 个自由度,覆盖手臂、躯干和腿部关节。
- 结构与外观:全机身采用 3D 打印结构,官方开源 STP/STL 模型文件,便于零件更换、结构加固和外观重设计。
- 关节执行器:Fashionstar RA8-U25H-M 总线舵机 × 17(支持总线通讯,简化布线)。
- Web 可视化动作编辑器:提供无需安装的浏览器控制平台,支持舵机实时调试和示教模式编程。完成的动作组可导出为标准
.json格式文件,便于各类主控(如 Arduino、STM32、Raspberry Pi)解析与集成。 - 开箱即用:预配置 Seeed Studio XIAO ESP32-S3 作为主控板,并提供出厂演示程序。
- 多模块扩展:搭配 Seeed Studio XIAO 扩展板,板载 Grove 接口,可连接 Seeed Grove 系列传感器 / 控制模块。
- 生态扩展性:通过 Seeed Studio XIAO 扩展板上的 Grove 接口,可快速集成视觉、环境感知等 Grove 生态传感器和控制模块。
- 跨平台兼容性:为降低开发门槛,我们提供 RUC-01 转接板,板载 5V/3.3V 电源输出和 UART 接口。任何具备串口功能的控制器都可以与其通讯!
2. 规格参数
| 参数 | 数值 |
|---|---|
| 自由度(DOF) | 17 |
| 机身结构 | 3D 打印 |
| 舵机 | RA8-U25H-M 总线舵机 |
| 舵机电源接口板 | RUC-01 提供 4 路舵机接口、5V/3.3V 控制板电源、串口通讯接口(Grove 接口) |
| 主控制器 | Seeedstudio XIAO ESP32-S3 + Seeed Studio XIAO 扩展板 |
| 通讯协议 | 异步串行通讯(UART) |
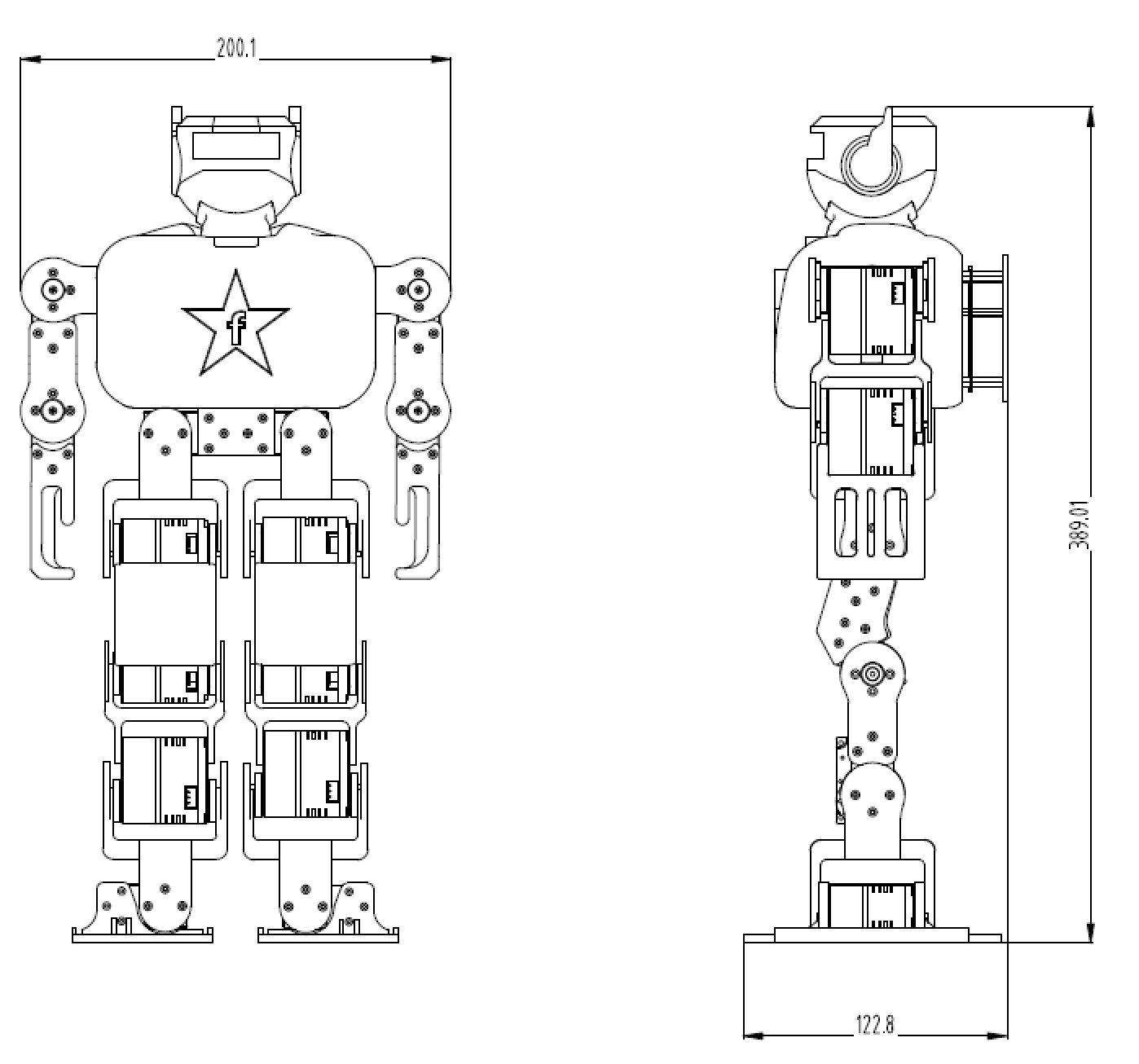
| 尺寸 | 200×122×389 mm |
3. 清单
| 项目 | 数量 |
|---|---|
| 17 自由度机器人总成 | 1 |
| 螺丝 KM M2*7mm | 10 |
| 螺丝 KB M2*7mm | 10 |
| 螺丝 PM M3*6mm | 2 |
| 舵机线 200mm 3-pin | 2 |
17 自由度机器人总成包含
- RA8-U25H-M × 17
- 机器人结构件(套装)× 1
- RUC-01 转接板 × 1
- Seeed XIAO ESP32-S3 × 1
- Seeed XIAO 扩展板 × 1
4. 外形尺寸
5. 硬件架构
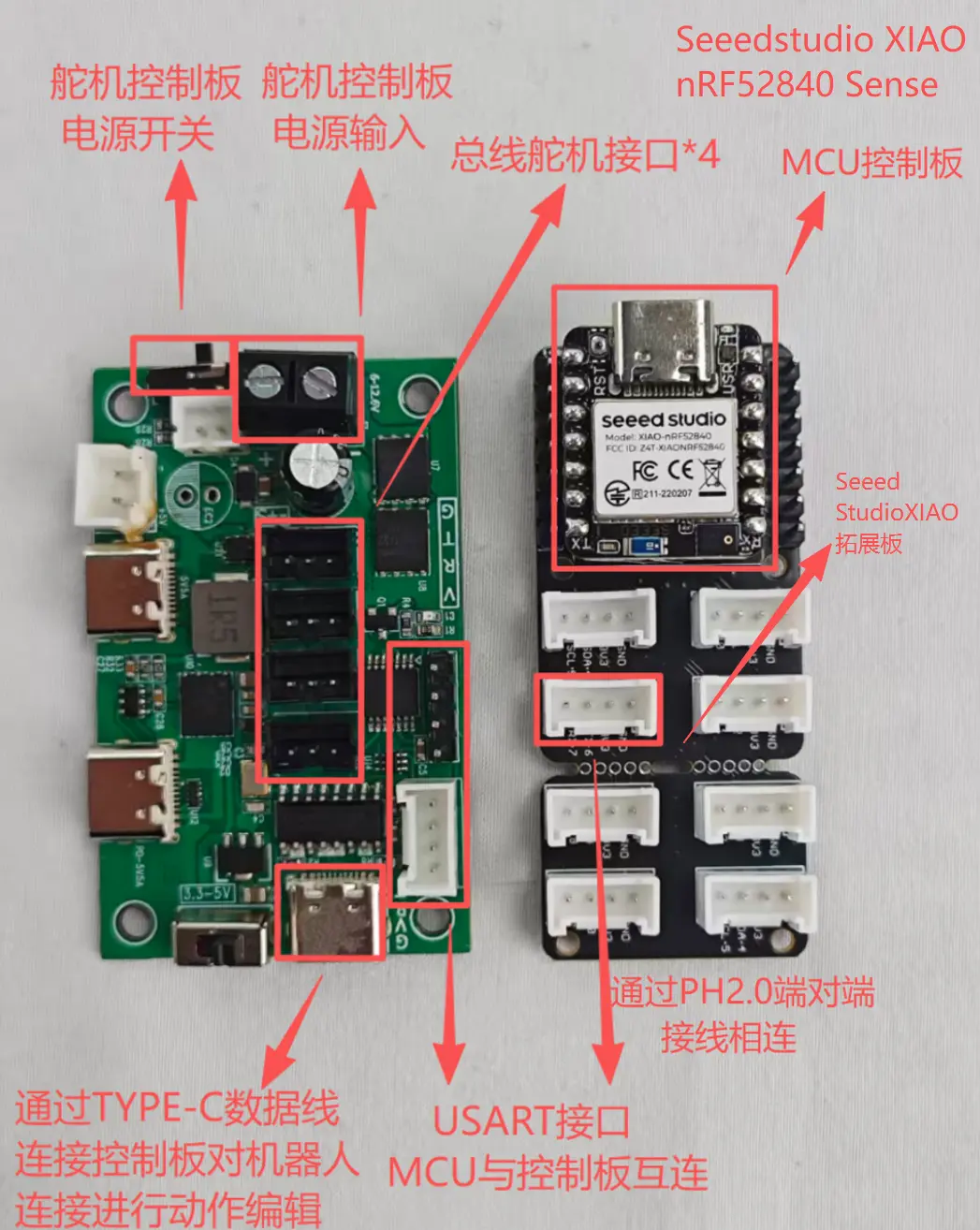
驱动与电源管理(RUC-01 接口板)
作为机器人的电源枢纽,驱动与电源管理(RUC-01 接口板)模块负责总线通讯管理和电源分配:
- 舵机通讯:板载 4 路总线舵机接口(支持菊花链扩展),负责为 17 个总线舵机提供信号与电源。
- PC 调试接口:集成 USB Type-C 接口,可直接连接 PC 主机进行动作组编辑与调试。
- 系统供电:负责电压转换,并为主控板提供稳定的电源输入。
- 通讯接口:提供标准 UART 串口,用于接收上位主控板发送的控制指令。
逻辑主控与扩展(MCU + Grove 扩展板)
作为机器人的“大脑”,逻辑主控与扩展(MCU + Grove 扩展板)负责运行控制算法和处理传感器数据:
- 核心控制器:采用 Seeed Studio XIAO 系列开发板,体积小巧但性能强大。
- 生态扩展:搭配 Grove 接口扩展板,提供丰富的通用接口。
- 主要功能:运行机器人运动学程序,并通过 Grove 接口无缝连接各类传感器(如超声波、视觉、语音模块等),实现复杂交互功能。
数据流说明
调试 / 编辑模式(Debug Mode)
PC --(USB)--> RUC-01 --(Bus)--> Servos
说明:通过 PC 端软件直接调节舵机角度并保存动作组,绕过 XIAO 主控板。
自主模式(Autonomous Mode)
Sensor / Remote --(Signal)--> XIAO --(UART Command)--> RUC-01 --(Bus)--> Servos
说明:XIAO 主控板根据传感器反馈或预存代码自主控制机器人的动作。
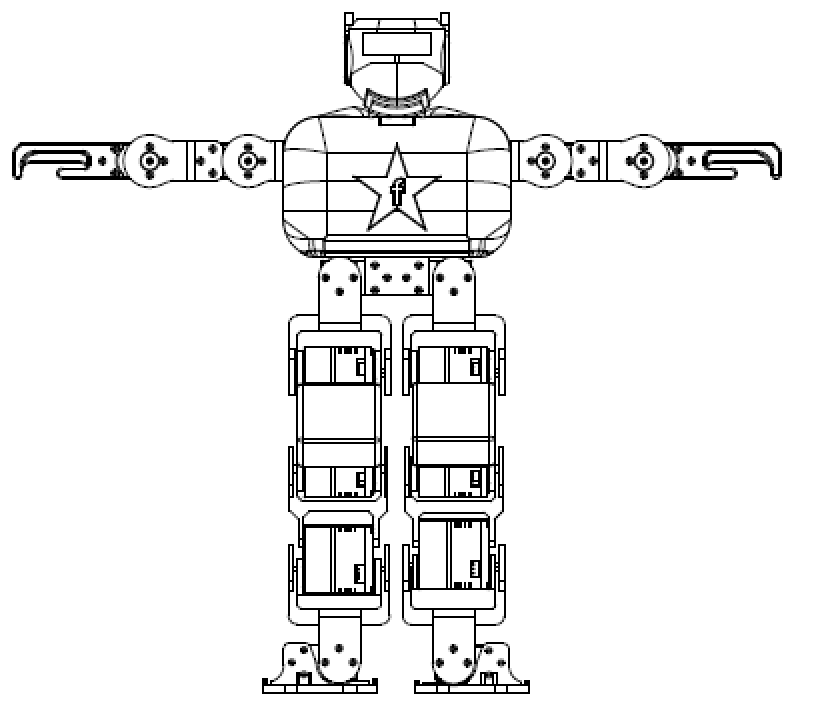
6. 机械结构
- 机器人结构展示及默认舵机 ID 编号
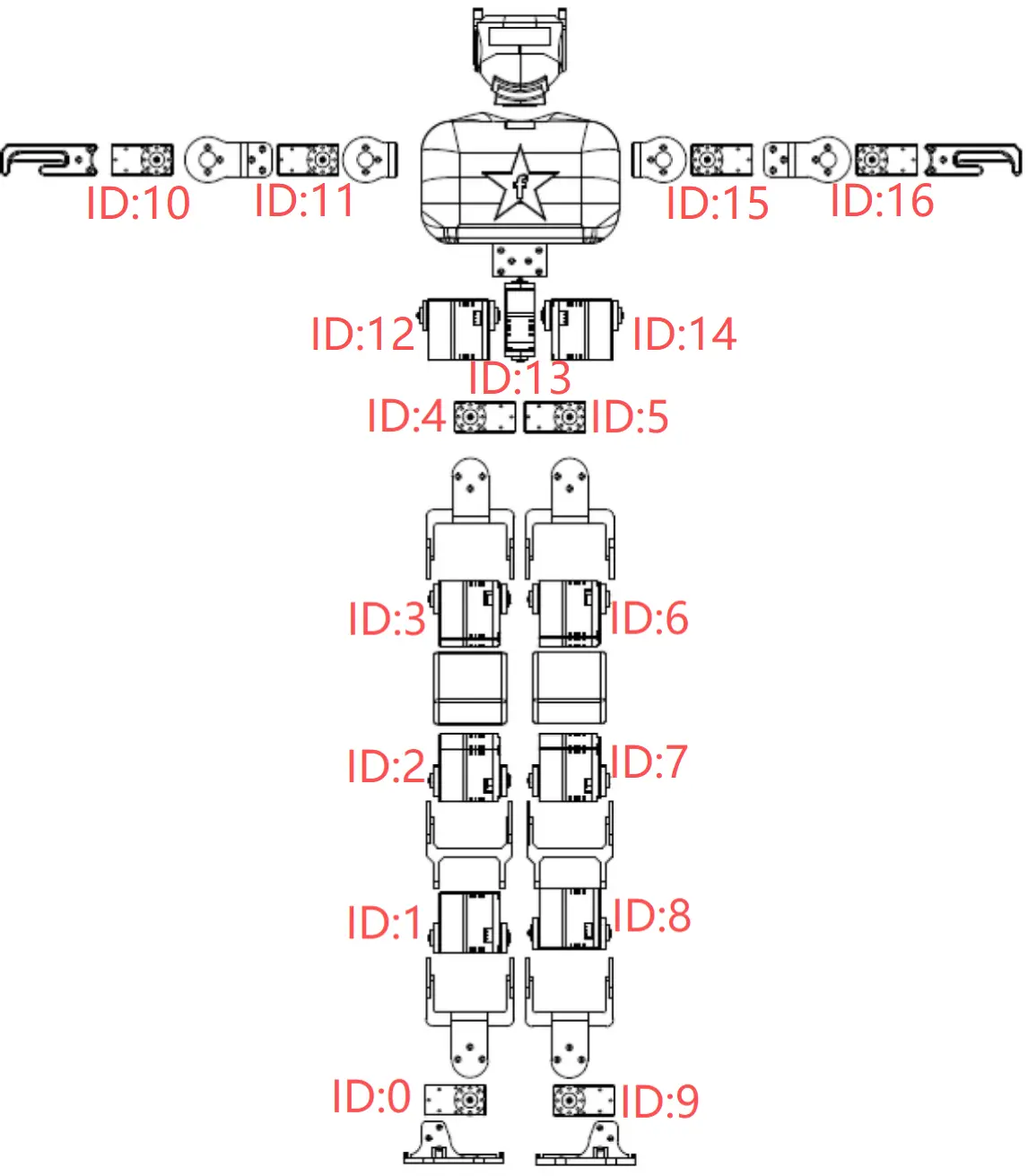
- 所有舵机均为零度时的机器人姿态
7. 图纸与模型下载
如需获取完整的 3D 打印数据,请访问:MakerWorld - Atom X
我们后续会逐步提供更完整的装配视频和图文说明,请持续关注本页面的更新。
8. 接线指南

9. 使用说明
Atom-X 的使用请参考 Atom-S 用户手册,所有操作与 Atom-S 完全相同。
常见问题
Q1: Atom-X 应该使用什么电池?
A: 建议使用 2S 或 3S 锂聚合物电池,并配合 XT60 接插件。
Q2: 是否可以使用其他主控板替代 XIAO ESP32-S3?
A: 该设计针对 XIAO ESP32-S3 做了优化,但任何具有足够 GPIO 的 ESP32 开发板都可以通过修改代码进行适配。
Q3: 如何更新固件?
A: 通过 USB 将 XIAO ESP32-S3 连接到电脑,并使用 Arduino IDE 或 PlatformIO 上传新程序。