使用 reComputer Jetson 控制 PX4
将高性能的伴随计算机 reComputer Mini J3010 (Jetson Orin Nano 4G) 与 PX4 飞控 搭配,可为自动驾驶汽车、船只和无人机等各类智能无人系统构建核心架构。这一强大组合在物流、科学研究、搜救以及精准农业等领域解锁了创新应用。
该方案支持在机载端执行视觉导航、目标跟踪与实时避障等复杂任务。而这两颗“大脑”之间的通信链路,则是影响系统整体性能与可靠性的关键。

- 如何将 Jetson 与 Pixhawk 进行物理连接。
- uXRCE-DDS、MAVSDK 与 MAVROS 的优缺点。
- 三种通信方式的逐步配置步骤。
- 如何验证连接并排查常见问题。
前置条件
开始前,请确认你具备以下条件:
- 硬件: 见下方“实验环境”表格中的所有设备。
- 软件: 全新安装的 Jetson Pack 6.2 与 ROS 2 Humble。
- 工具: 在 Jetson 上已安装
git与pip。 - 知识: 具备 Linux 命令行、ROS 2 基础(节点、话题)以及 QGroundControl 中 PX4 参数的基本认知。
系统配置
实验环境
| 组件 | 设备/软件 | 版本/型号 |
|---|---|---|
| 伴随计算机 | 设备 | reComputer Mini J3010 (Jetson Orin Nano 4G) |
| 操作系统 | Ubuntu 22.04 (JetPack 6.2) | |
| ROS | ROS 2 Humble | |
| 飞控 | MCU | Pixhawk 4 Mini |
| 固件 | PX4 v1.15 | |
| 地面站 PC | 操作系统 | Ubuntu 22.04 |
| QGC | QGroundControl v5.0 或更高 |
硬件连接
我们强烈建议使用 Jetson 的原生 UART,以获得稳健连接且不占用 USB 接口。
- 布线:使用 4 针 JST-GH 线,将 Pixhawk 4 Mini 的
TELEM1端口连接到 Jetson Orin Nano 的UART1引脚。 - 设备文件:该串口在 Jetson 系统中对应
/dev/ttyTHS1。
Pixhawk 4 Mini 端口与引脚详情(点击展开)
| UART | 设备节点 | QGC 参数说明 | 飞控端口标注 |
|---|---|---|---|
| UART1 | /dev/ttyS0 | GPS1 | GPS Module |
| USART2 | /dev/ttyS1 | TELEM1 | TELEM1 |
| USART3 | /dev/ttyS2 | TELEM2 | N/A |
| UART4 | /dev/ttyS3 | TELEM/SERIAL4 | UART/I2C B |
| USART6 | /dev/ttyS4 | N/A | RC IN |
| UART7 | /dev/ttyS5 | N/A | Debug |
| UART8 | /dev/ttyS6 | N/A | 未连接(无 PX4IO) |
TELEM1、TELEM2 端口
| 引脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2(黑) | TX(出) | +3.3V |
| 3(黑) | RX(入) | +3.3V |
| 4(黑) | CTS(入) | +3.3V |
| 5(黑) | RTS(出) | +3.3V |
| 6(黑) | GND | GND |
DSM RC 端口
| 引脚 | 信号 | 电压 |
|---|---|---|
| 1(空) | VDD_5V_SBUS_RC | +5V |
| 2(黄) | SBUS* | +3.3V |
| 3(空) | RSSI** | +3.3V |
| 4(红) | VDD_3V3_SPEKTRUM | +3.3V |
| 5(黑) | GND | GND |
UART & I2C B 端口 *
| 引脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2(黑) | TX(出) | +3.3V |
| 3(黑) | RX(入) | +3.3V |
| 4(黑) | SCL2 | +3.3V |
| 5(黑) | SDA2 | +3.3V |
| 6(黑) | GND | GND |
SBUS RC 端口
| 引脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VDD_5V_SBUS_RC | +5V |
| 2(黄) | SBUS* | +3.3V |
| 3(空) | RSSI** | +3.3V |
| 4(空) | VDD_3V3_SPEKTRUM | +3.3V |
| 5(黑) | GND | GND |
脚注:
- (UART & I2C B 端口): 备用端口,可连接支持串口或 I2C 的传感器,例如第二个 GPS 模块可接入此处。
- (SBUS 信号): 在此连接 SBUS 或 DSM/Spektrum 接收机的信号线。
- (RSSI 信号): 向自动驾驶仪发送 RC 信号强度信息。
为避免每次执行串口命令都使用 sudo,你必须将当前用户加入 dialout 组。这是一次性的关键设置。
sudo usermod -a -G dialout $USER
必须重启 Jetson,变更才会生效!
选择你的方法:对比
在开始之前,先理解各方案的取舍。最合适的方法完全取决于你的项目目标。
| 特性 | uXRCE-DDS(ROS 2 原生) 🚀 | MAVSDK(高级 API) 🐍 | MAVROS(ROS 桥) 🌉 |
|---|---|---|---|
| 架构 | PX4 与 ROS 2 共享 DDS 数据空间,实现原生通信。 | 独立的 C++ 库(含封装),提供高级 API。 | 桥接/网关:将 MAVLink 协议转换为 ROS 话题/服务。 |
| 性能 | 最高。零拷贝数据传输,时延最低。 | 高。API 调用直接生成高效的 MAVLink 消息。 | 良好。由于 MAVLink→ROS 转换层存在少量开销。 |
| 易用性 | 中等。需要编译 Agent 与 px4_msgs。 | 最简单。函数式 API,适合快速原型。 | 学习曲线较陡,但与 ROS 生态的集成最深入。 |
| 灵活性 | 优秀。可直接访问所有 PX4 内部 uORB 话题。 | 有限。暴露常见动作(起飞、航点),不提供原始数据。 | 优秀。几乎可访问全部 MAVLink 消息、参数与服务。 |
| ROS 集成 | 原生 ROS 2。官方、面向未来的方法。 | 与 ROS 无关。可用于任意项目,也易于封装为 ROS 节点。 | 以 ROS 为中心。ROS 1 事实标准,在 ROS 2 中也被广泛使用。 |
| 适用场景 | 对低时延与底层数据访问有要求的性能关键型 ROS 2 项目。 | 任务级脚本、快速原型、非 ROS 项目与教学。 | 与 Nav2、MoveIt 等 ROS 包深度集成的复杂机器人系统。 |
方法 1:uXRCE-DDS(ROS 2 原生集成)
这是 PX4 面向 ROS 2 的官方方案,将其内部 uORB 消息系统直接桥接到 ROS 2 网络,实现近乎零开销的通信。
步骤 1:编译 Micro XRCE-DDS Agent
Agent 是运行在 Jetson 上的小程序,作为飞控串口与 ROS 2 网络间的代理。
# 1. 克隆指定版本的 Agent 仓库
cd ~
git clone -b v2.4.2 https://github.com/eProsima/Micro-XRCE-DDS-Agent.git
cd Micro-XRCE-DDS-Agent
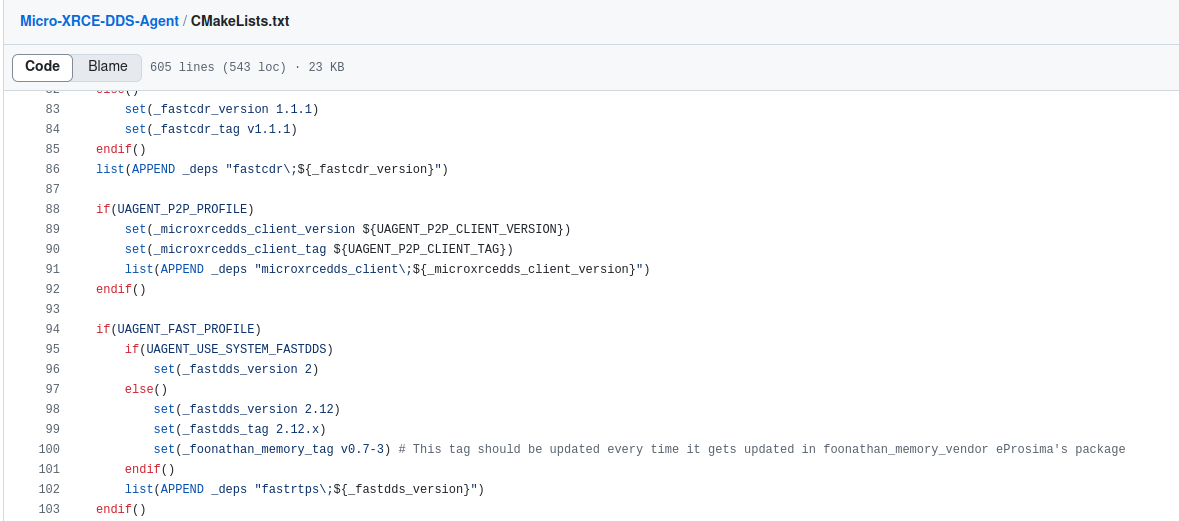
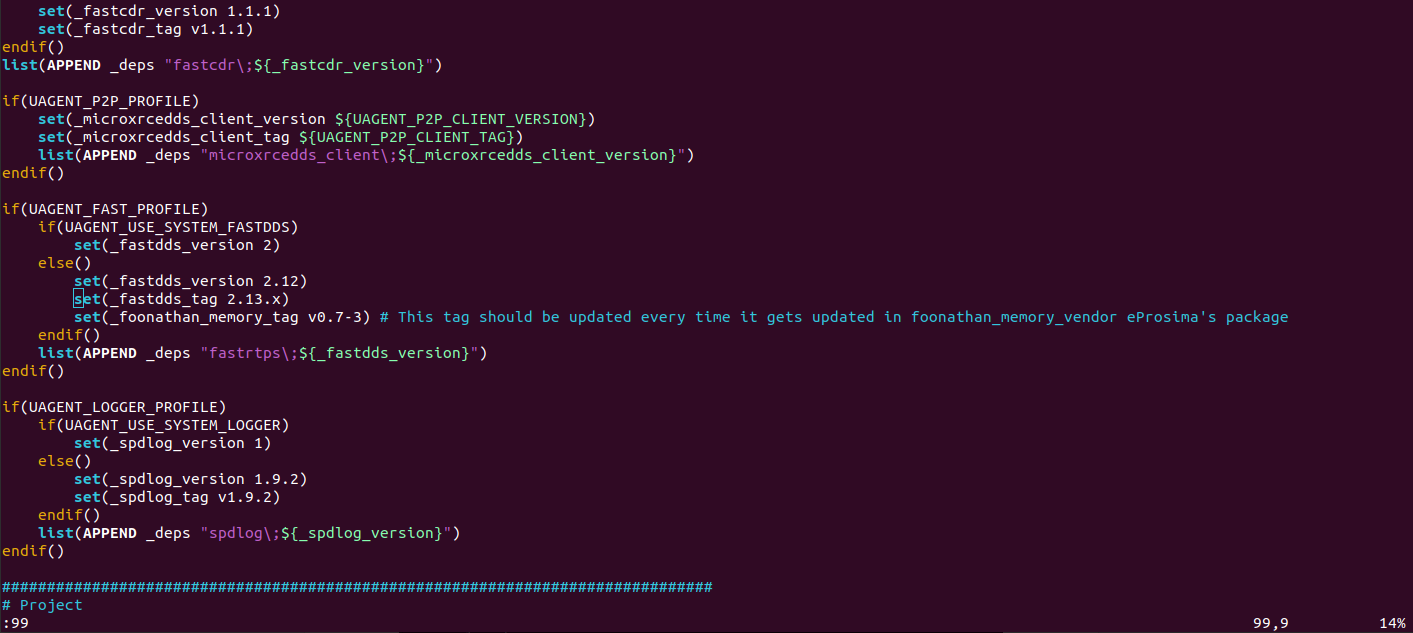
# 2. 重要:修补 Fast-DDS 依赖版本
# 供应商移除了 v2.12.x 标签,这里更新为可用版本。
sed -i 's/v2.12.x/v2.13.x/g' SuperBuild.cmake
# 3. 构建并安装 Agent
mkdir build && cd build
cmake ..
make
sudo make install # 将 MicroXRCEAgent 安装为系统可执行
步骤 2:构建 px4_msgs ROS 2 包
为让 ROS 2 理解 PX4 的话题,需要构建其消息定义。
# 1. 创建 ROS 2 工作空间
mkdir -p ~/px4_ros_ws/src
cd ~/px4_ros_ws/src
# 2. 克隆所需仓库
git clone https://github.com/PX4/px4_msgs.git
git clone https://github.com/PX4/px4_ros_com.git # 包含示例
# 3. 切换到与你的固件版本匹配的分支
cd px4_msgs
git checkout release/1.15
# 4. 构建工作空间
cd ~/px4_ros_ws
source /opt/ros/humble/setup.bash
colcon build
px4_msgs 的版本必须与 PX4 固件版本一致,这是兼容性的关键。
此外,自 PX4 固件 v1.14 起,uXRCE-DDS 原生 ROS 2 支持成为标准,这需要具备 2MB 闪存 的飞控(如本指南使用的 Pixhawk 4 Mini)。
较老的经典硬件,例如常见的 Pixhawk 2.4.8(以及其他基于 FMUv2 的板卡)只有 1MB 闪存,无法运行该方法所需的标准预编译固件。虽然理论上可以通过定制、裁剪固件实现,但过程复杂。
如果你使用 Pixhawk 2.4.8 或其他 1MB 闪存的飞控,我们强烈建议跳过该方法,直接查看 方法 2(MAVSDK) 或 方法 3(MAVROS),这两种方法基于 MAVLink 协议,完全支持此类硬件。
px4_msgs 分支必须与 PX4 固件版本一致,以确保消息定义兼容。

步骤 3:配置 PX4 固件
连接 QGroundControl,并设置以下参数:
UXRCE_DDS_CFG:设为TELEM1,在该端口启用 XRCE-DDS 客户端。SER_TEL1_BAUD:设为921600 8N1。MAV_1_CONFIG:设为Disabled,避免 MAVLink 与该端口冲突。- 保存参数并重启飞控。
步骤 4:启动与验证
-
在 Jetson 上启动 Agent(终端 1):
Terminal 1: Run AgentMicroXRCEAgent serial --dev /dev/ttyTHS1 -b 921600 -
验证 ROS 2 话题(终端 2):
Terminal 2: Verify Topics# 每个新终端都需 source 工作空间
source ~/px4_ros_ws/install/setup.bash
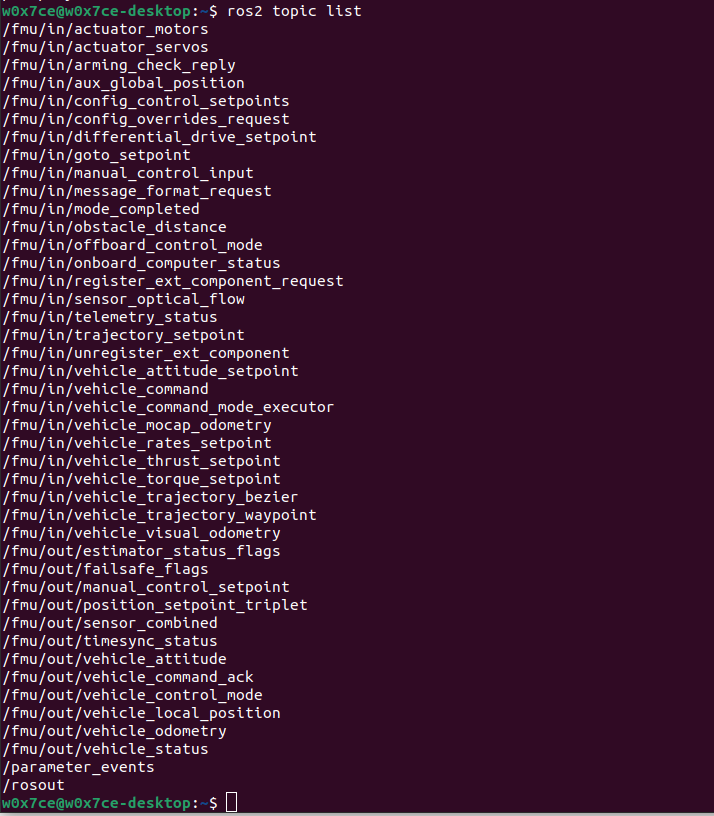
# 你应能看到以 /fmu/ 开头的话题
ros2 topic list | grep /fmu/
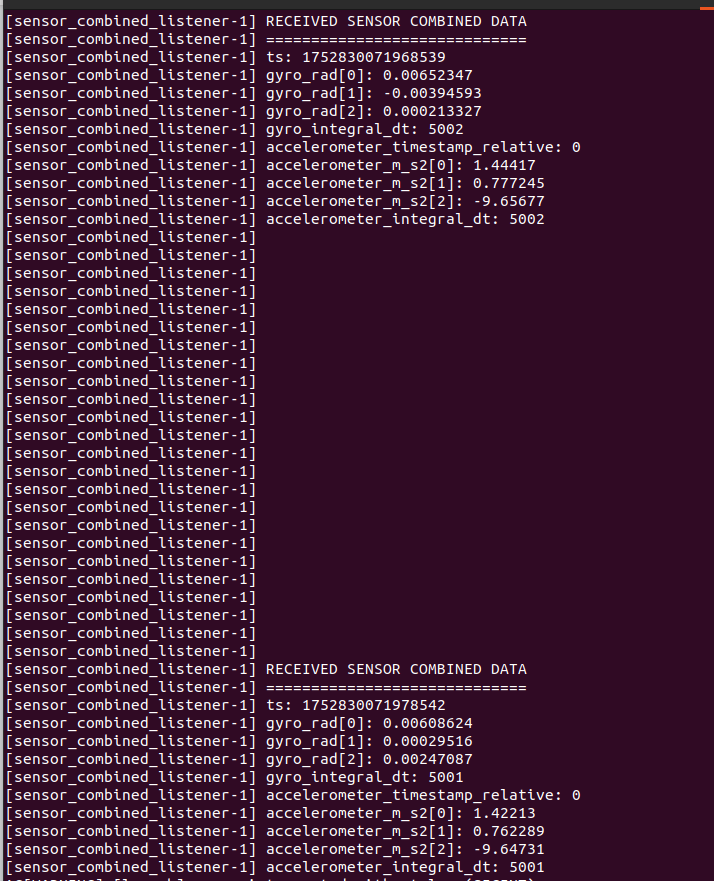
# 回显某个话题,查看从飞控持续流入的数据
ros2 topic echo /fmu/out/vehicle_odometry
方法 2:MAVSDK(高级 API)
MAVSDK 提供简洁、现代的编程接口来控制无人机,屏蔽 MAVLink 协议的复杂性,非常适合编写高层任务脚本。
步骤 1:配置 PX4 固件
在 QGroundControl 中,将端口配置从 DDS 调回 MAVLink 模式。
UXRCE_DDS_CFG:改回Disabled。MAV_1_CONFIG:设为TELEM 1,将此端口分配给 MAVLink。MAV_1_MODE:设为Onboard,指定该链路用于伴随计算机。SER_TEL1_BAUD:确保仍为921600 8N1。- 保存参数并重启飞控。
步骤 2:安装 MAVSDK-Python
pip3 install mavsdk
步骤 3:编写并运行控制脚本
以下 Python 脚本将连接、起飞至 10 米、等待并降落。
import asyncio
from mavsdk import System
async def run():
# Create a drone object and connect to the flight controller
drone = System()
await drone.connect(system_address="serial:///dev/ttyTHS1:921600")
print("Waiting for drone to connect...")
# This is an asynchronous generator that yields connection state updates
async for state in drone.core.connection_state():
if state.is_connected:
print("--> Drone discovered!")
break
if __name__ == "__main__":
# Run the asyncio event loop
asyncio.run(run())
在终端中执行:python3 takeoff_and_land.py。
方法 3:MAVROS(功能强大的 ROS 桥)
MAVROS 是久经验证的 MAVLink→ROS 网关,功能全面、稳定性高,适用于复杂的 ROS 系统。
步骤 1:配置 PX4 固件
MAVROS 的 PX4 配置与 MAVSDK 完全相同。确保在 TELEM1 上将端口配置为 MAVLink 的 Onboard 模式。
步骤 2:安装 MAVROS 与依赖
sudo apt update
sudo apt install ros-humble-mavros ros-humble-mavros-msgs
MAVROS 需要地理数据集来进行坐标转换。缺少该数据集是启动时崩溃的常见原因。以下脚本可下载并安装它:
sudo bash /opt/ros/humble/lib/mavros/install_geographiclib_datasets.sh
步骤 3:启动与验证
-
启动 MAVROS 节点:
Terminal 1: Launch MAVROSsource /opt/ros/humble/setup.bash
# 启动 mavros,并通过参数指定 FCU 串口
ros2 launch mavros px4.launch fcu_url:="serial:///dev/ttyTHS1:921600" -
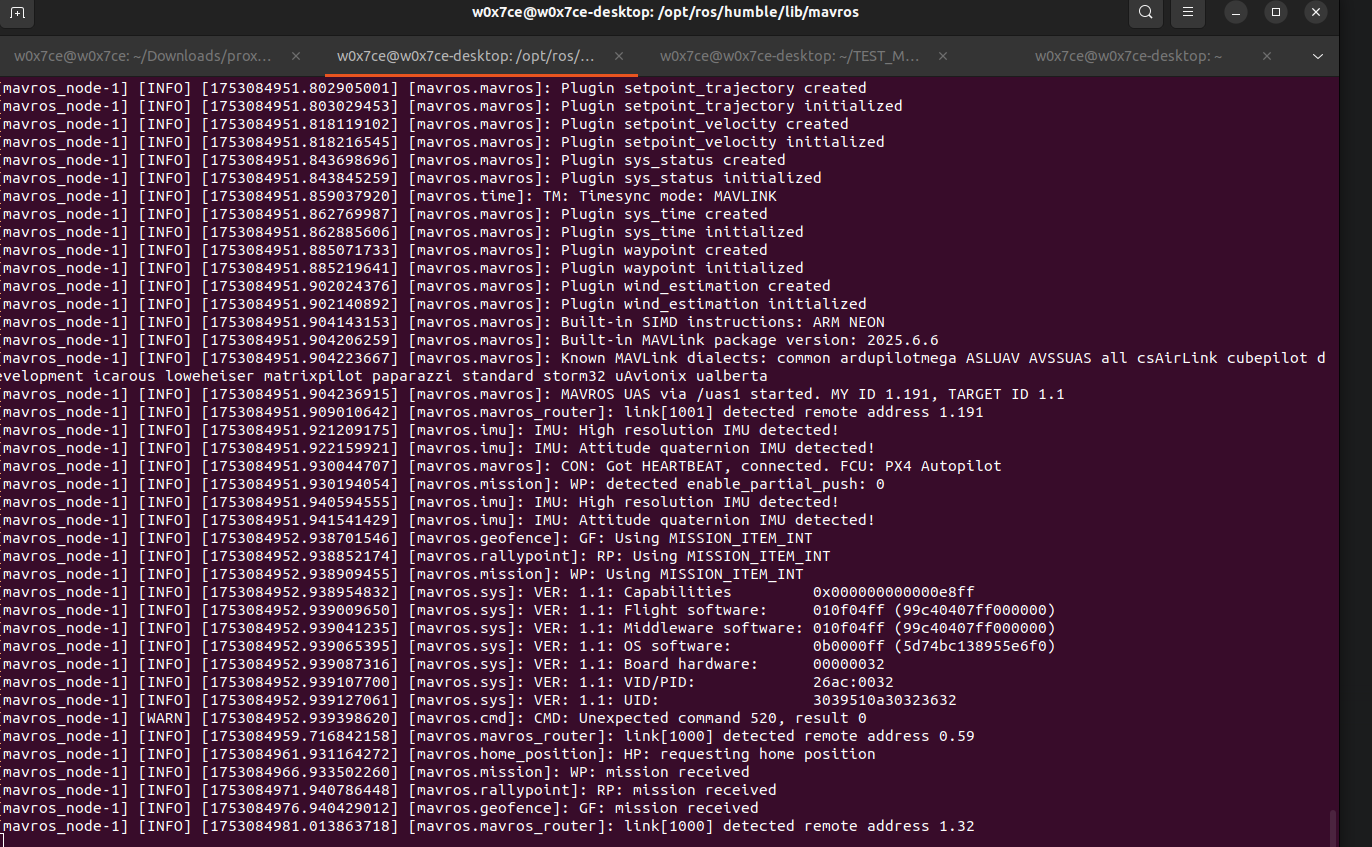
验证连接:
在新终端中回显 MAVROS 状态话题。
Terminal 2: Verify Connectionros2 topic echo /mavros/state观察输出。当
connected字段变为true时,说明 MAVROS 已与 PX4 成功通信。

常见问题排查
遇到问题时,先检查以下几点:
- 串口“Permission Denied”:你忘记将用户加入
dialout组并重启。参见“硬件连接”部分。 /dev/ttyTHS1报 “No such file or directory”:检查物理连接。飞控是否供电?运行ls /dev/ttyTHS*确认设备名。- MAVROS 启动即崩溃:很可能遗漏了
install_geographiclib_dataset.sh步骤。按方法 3 的命令执行。 colcon build失败:确保已先source /opt/ros/humble/setup.bash。若依赖更复杂,可执行rosdep install --from-paths src --ignore-src -r -y。
最后
至此,你已经掌握了在 Jetson Orin 与 PX4 飞控之间建立通信的三种强大方法。最佳选择取决于项目架构、性能需求与开发效率。理解各自取舍后,你就能为任何自主无人机应用打下坚实基础。
祝飞行顺利!🚁
资源
技术支持与产品讨论
感谢您选择我们的产品!我们为您提供多种支持渠道,确保获得尽可能顺畅的体验。我们提供多种交流方式以满足不同偏好与需求。