在 Nvidia Jetson Thor 上使用 NemoClaw 控制 reBot Arm B601
1. 项目概述
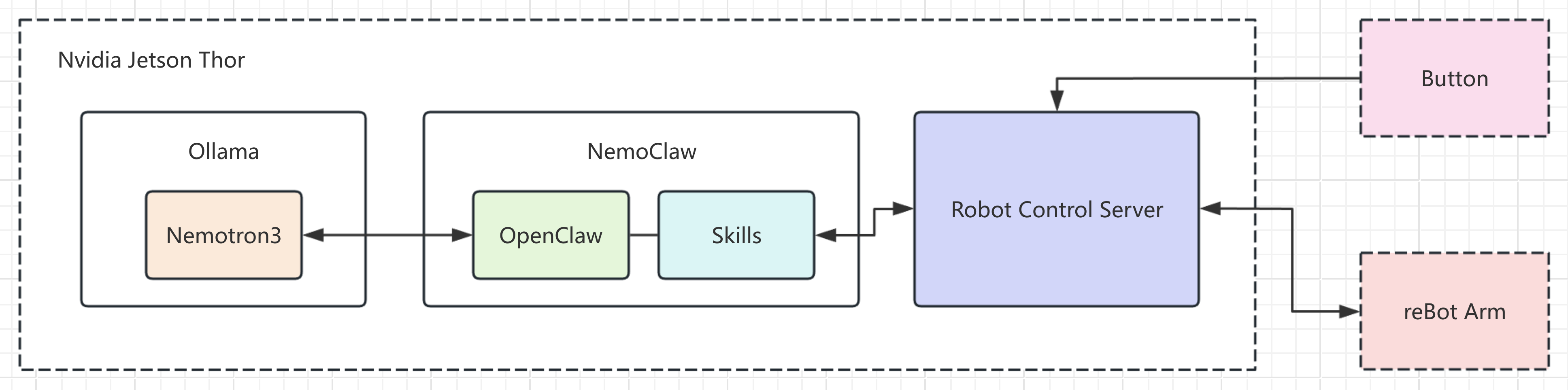
NVIDIA NemoClaw 是一个开源参考栈,可简化更安全地运行 OpenClaw 常驻助手。本 Wiki 说明如何在 Jetson Thor 上部署 NemoClaw,并将 reBot Arm B601 的能力接入 NemoClaw 智能体工作流,形成“语义理解 + 视觉检测 + 机器人执行”的闭环。
NemoClaw:用于任务编排和指令路由的本地智能体/控制框架。Nemotron3:可选模型能力,用于意图理解和高层决策。Nvidia Jetson Thor:用于推理、后端服务和设备驱动的本地计算平台。reBot Arm B601:用于抓取与放置的机械臂。
2. 硬件需求
- Nvidia Jetson Thor(已安装 JetPack 7.x)
- reBot Arm B601 DM
- USB-to-CAN adapter
- USB 摄像头
- 机械臂电源和 USB 线缆
- USB 按钮(可选)


3. 硬件连接
- 组装并配置机械臂。
- 将 USB-to-CAN 适配器、USB 摄像头和机械臂连接到 Jetson Thor 的 USB Type-A 接口。
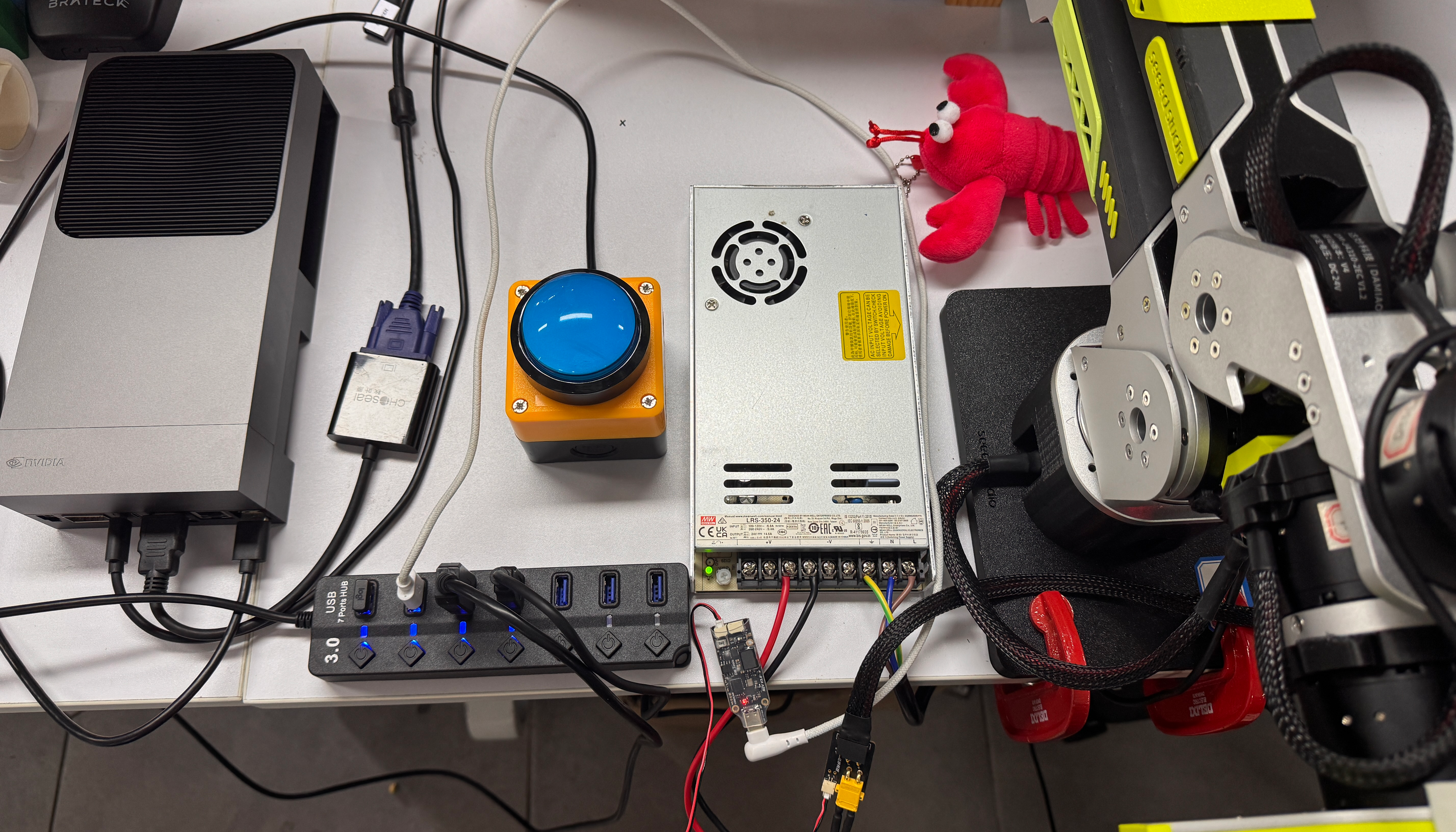
Jetson 设备可能只提供两个 USB Type-A 接口。如果你需要更多接口,请使用 USB 集线器。
上电后,验证设备:
ls /dev/ttyACM*
ls /dev/video*
如果一切连接正确,你应该会看到类似如下的输出:

4. 系统与依赖环境配置
4.1 安装 Ollama
如果需要本地 LLM 能力(可选):
curl -fsSL https://ollama.com/install.sh | sh
ollama pull nemotron3:33b

4.2 安装 NemoClaw
在 Jetson 上安装 NemoClaw:
curl -fsSL https://www.nvidia.com/nemoclaw.sh | bash
然后运行 nemoclaw onboard 来创建一个新应用。下面展示了一个交互式引导日志示例:
nemoclaw onboard log
seeed@seeed:~$ nemoclaw onboard --no-gpu
NemoClaw Onboarding
===================
[1/8] Preflight checks
──────────────────────────────────────────────────
✓ Docker is running
✓ Container DNS resolution works
✓ Container runtime: docker
✓ Container runtime resources: 14 vCPU / 122.8 GiB
✓ openshell CLI: openshell 0.0.37
Cleaning up previous NemoClaw session...
! No active forward found for port 18789
✓ Previous session cleaned up
✓ Port 8080 available (OpenShell gateway)
✓ NVIDIA GPU detected (NVIDIA Thor, 125771 MB)
✓ Sandbox GPU: disabled by configuration
✓ Memory OK: 125771 MB RAM + 0 MB swap
NVIDIA GPU hardware detected but nvidia-smi is not available.
Install NVIDIA drivers and the Container Toolkit for default GPU passthrough.
[2/8] Starting OpenShell gateway
──────────────────────────────────────────────────
Starting OpenShell Docker-driver gateway...
Gateway log: /home/seeed/.local/state/nemoclaw/openshell-docker-gateway/openshell-gateway.log
✓ Docker-driver gateway is healthy
[3/8] Configuring inference (NIM)
──────────────────────────────────────────────────
Detected local inference option: Ollama
Inference options:
1) NVIDIA Endpoints
2) OpenAI
3) Other OpenAI-compatible endpoint
4) Anthropic
5) Other Anthropic-compatible endpoint
6) Google Gemini
7) Local Ollama (localhost:11434) — running (suggested)
8) Model Router (experimental)
Choose [1]: 7
✓ Using Ollama on localhost:11434 (proxy on :11435)
Ollama models:
1) nemotron3:33b
2) qwen3.5:0.8b
3) nemotron-3-nano:30b
4) Other...
Choose model [3]: 1
Loading Ollama model: nemotron3:33b
Chat Completions API available — OpenClaw will use openai-completions.
Sandbox name (lowercase, starts with a letter, letters/numbers/internal hyphens only, ends with letter/number) [my-assistant]:
──────────────────────────────────────────────────
Review configuration
──────────────────────────────────────────────────
Provider: ollama-local
Model: nemotron3:33b
API key: (not required for ollama-local)
Web search: disabled
Messaging: none
Sandbox name: my-assistant
Note: Sandbox build typically takes 3–8 minutes on this host.
──────────────────────────────────────────────────
Web search and messaging channels will be prompted next.
Apply this configuration? [Y/n]:
[4/8] Setting up inference provider
──────────────────────────────────────────────────
✓ Active gateway set to 'nemoclaw'
✓ Updated provider ollama-local
Gateway inference configured:
Route: inference.local
Provider: ollama-local
Model: nemotron3:33b
Version: 12
Timeout: 180s
Priming Ollama model: nemotron3:33b
✓ Inference route set: ollama-local / nemotron3:33b
Enable Brave Web Search? [y/N]:
[5/8] Messaging channels
──────────────────────────────────────────────────
Available messaging channels:
[1] ○ telegram — Telegram bot messaging
[2] ○ discord — Discord bot messaging
[3] ○ slack — Slack bot messaging
Press 1-3 to toggle, Enter when done:
Skipping messaging channels.
[6/8] Creating sandbox
──────────────────────────────────────────────────
Creating sandbox 'my-assistant' (this takes a few minutes on first run)...
Pinning base image to sha256:1fb69ddbe730...
Building sandbox image...
Building image openshell/sandbox-from:1778663150 from /tmp/nemoclaw-bu...
Step 1/63 : ARG BASE_IMAGE=ghcr.io/nvidia/nemoclaw/sandbox-base@sha256...
Step 2/63 : FROM node:22-trixie-slim@sha256:2d9f5c76c8f4dd36e8f253bee5...
Step 3/63 : ENV NPM_CONFIG_AUDIT=false NPM_CONFIG_FUND=false N...
Step 4/63 : COPY nemoclaw/package.json nemoclaw/package-lock.json nemo...
Step 5/63 : COPY nemoclaw/src/ /opt/nemoclaw/src/
Step 6/63 : WORKDIR /opt/nemoclaw
Step 7/63 : RUN npm ci && npm run build
Step 8/63 : FROM ${BASE_IMAGE}
Step 9/63 : RUN set -eu; apt-mark manual procps e2fsprogs 2>/dev/n...
Step 10/63 : COPY --from=builder /opt/nemoclaw/dist/ /opt/nemoclaw/dist/
Step 11/63 : COPY nemoclaw/openclaw.plugin.json /opt/nemoclaw/
Step 12/63 : COPY nemoclaw/package.json nemoclaw/package-lock.json /op...
Step 13/63 : COPY nemoclaw-blueprint/ /opt/nemoclaw-blueprint/
Step 14/63 : WORKDIR /opt/nemoclaw
Step 15/63 : RUN npm ci --omit=dev
Step 16/63 : RUN set -eu; MIN_VER=$(grep -m 1 'min_openclaw_versio...
Step 17/63 : COPY scripts/rcf_patch.py /usr/local/lib/nemoclaw/rcf_pat...
Step 18/63 : RUN set -eu; OC_DIST=/usr/local/lib/node_modules/open...
Step 19/63 : RUN mkdir -p /sandbox/.nemoclaw/blueprints/0.1.0 && c...
Step 20/63 : COPY scripts/lib/sandbox-init.sh /usr/local/lib/nemoclaw/...
Step 21/63 : COPY scripts/nemoclaw-start.sh /usr/local/bin/nemoclaw-start
Step 22/63 : COPY nemoclaw-blueprint/scripts/*.js /usr/local/lib/nemoc...
Step 23/63 : COPY scripts/codex-acp-wrapper.sh /usr/local/bin/nemoclaw...
Step 24/63 : COPY scripts/generate-openclaw-config.py /usr/local/lib/n...
Step 25/63 : COPY nemoclaw-blueprint/openclaw-plugins/ /usr/local/shar...
Step 26/63 : RUN chmod 755 /usr/local/bin/nemoclaw-start /usr/local/bi...
Step 27/63 : ARG NEMOCLAW_MODEL=nemotron3:33b
Step 28/63 : ARG NEMOCLAW_PROVIDER_KEY=inference
Step 29/63 : ARG NEMOCLAW_PRIMARY_MODEL_REF=inference/nemotron3:33b
Step 30/63 : ARG CHAT_UI_URL=http://127.0.0.1:18789
Step 31/63 : ARG NEMOCLAW_INFERENCE_BASE_URL=https://inference.local/v1
Step 32/63 : ARG NEMOCLAW_INFERENCE_API=openai-completions
Step 33/63 : ARG NEMOCLAW_CONTEXT_WINDOW=131072
Step 34/63 : ARG NEMOCLAW_MAX_TOKENS=4096
Step 35/63 : ARG NEMOCLAW_REASONING=false
Step 36/63 : ARG NEMOCLAW_INFERENCE_INPUTS=text
Step 37/63 : ARG NEMOCLAW_AGENT_TIMEOUT=600
Step 38/63 : ARG NEMOCLAW_AGENT_HEARTBEAT_EVERY=
Step 39/63 : ARG NEMOCLAW_INFERENCE_COMPAT_B64=e30=
Step 40/63 : ARG NEMOCLAW_MESSAGING_CHANNELS_B64=W10=
Step 41/63 : ARG NEMOCLAW_MESSAGING_ALLOWED_IDS_B64=e30=
Step 42/63 : ARG NEMOCLAW_DISCORD_GUILDS_B64=e30=
Step 43/63 : ARG NEMOCLAW_TELEGRAM_CONFIG_B64=e30=
Step 44/63 : ARG NEMOCLAW_DISABLE_DEVICE_AUTH=1
Step 45/63 : ARG NEMOCLAW_BUILD_ID=1778663150303
Step 46/63 : ARG NEMOCLAW_PROXY_HOST=10.200.0.1
Step 47/63 : ARG NEMOCLAW_PROXY_PORT=3128
Step 48/63 : ARG NEMOCLAW_WEB_SEARCH_ENABLED=0
Step 49/63 : ENV NEMOCLAW_MODEL=${NEMOCLAW_MODEL} NEMOCLAW_PROVIDE...
Step 50/63 : WORKDIR /sandbox
Step 51/63 : USER sandbox
Step 52/63 : RUN python3 /usr/local/lib/nemoclaw/generate-openclaw-con...
Step 53/63 : RUN (openclaw doctor --fix > /dev/null 2>&1 || true) ...
Still building sandbox image... (20s elapsed)
Still building sandbox image... (30s elapsed)
Still building sandbox image... (45s elapsed)
Still building sandbox image... (60s elapsed)
Still building sandbox image... (75s elapsed)
Still building sandbox image... (90s elapsed)
Still building sandbox image... (105s elapsed)
Still building sandbox image... (120s elapsed)
Still building sandbox image... (135s elapsed)
Step 54/63 : RUN python3 -c "import json, os; path = os.path.expanduse...
Step 55/63 : USER root
Step 56/63 : RUN set -eu; config_dir=/sandbox/.openclaw; data_...
Step 57/63 : RUN if id gateway >/dev/null 2>&1 && id sandbox >/dev/nul...
Step 58/63 : RUN chown -R sandbox:sandbox /sandbox/.openclaw && ch...
Still building sandbox image... (175s elapsed)
Step 59/63 : RUN if ! grep -q "/tmp/nemoclaw-proxy-env.sh" /etc/profil...
Step 60/63 : RUN sha256sum /sandbox/.openclaw/openclaw.json > /sandbox...
Step 61/63 : RUN chown root:root /sandbox/.nemoclaw && chmod 1755 ...
Step 62/63 : ENTRYPOINT ["/usr/local/bin/nemoclaw-start"]
Step 63/63 : CMD ["/bin/bash"]
Built image openshell/sandbox-from:1778663150
Waiting for sandbox to become ready...
Sandbox reported Ready before create stream exited; continuing.
Waiting for sandbox to become ready...
Waiting for NemoClaw dashboard to become ready...
✓ Dashboard is live
! No active forward found for port 18789
✓ Sandbox 'my-assistant' created
[7/8] Setting up OpenClaw inside sandbox
──────────────────────────────────────────────────
✓ OpenClaw gateway launched inside sandbox
[8/8] Policy presets
──────────────────────────────────────────────────
Policy tier — controls which network presets are enabled:
[ ] Restricted
[ ] Balanced
> [✓] Open
↑/↓ j/k move Space select Enter confirm
Presets (Open defaults):
> [✓] [rw] npm
[✓] [rw] pypi
[✓] [rw] huggingface
[✓] [rw] brew
[✓] [rw] brave
[✓] [rw] slack
[✓] [rw] discord
[✓] [rw] telegram
[✓] [rw] jira
[✓] [rw] outlook
[ ] github
[✓] [rw] local-inference
↑/↓ j/k move Space include r toggle rw Enter confirm
Widening sandbox egress — adding: registry.npmjs.org, registry.yarnpkg.com
✓ Policy version 3 submitted (hash: 77d8e31dfb8c)
✓ Policy version 3 loaded (active version: 3)
Applied preset: npm
Widening sandbox egress — adding: pypi.org, files.pythonhosted.org
✓ Policy version 4 submitted (hash: 6637ad37a7b2)
✓ Policy version 4 loaded (active version: 4)
Applied preset: pypi
Widening sandbox egress — adding: huggingface.co, cdn-lfs.huggingface.co, router.huggingface.co
✓ Policy version 5 submitted (hash: e81bc64dabe1)
✓ Policy version 5 loaded (active version: 5)
Applied preset: huggingface
Widening sandbox egress — adding: formulae.brew.sh, github.com, ghcr.io, pkg-containers.githubusercontent.com, objects.githubusercontent.com, raw.githubusercontent.com
✓ Policy version 6 submitted (hash: d96caba06e19)
✓ Policy version 6 loaded (active version: 6)
Applied preset: brew
Widening sandbox egress — adding: api.search.brave.com
✓ Policy version 7 submitted (hash: be83e02b9a1c)
✓ Policy version 7 loaded (active version: 7)
Applied preset: brave
Widening sandbox egress — adding: slack.com, api.slack.com, hooks.slack.com, wss-primary.slack.com, wss-backup.slack.com
✓ Policy version 8 submitted (hash: 2b5d1cafea38)
✓ Policy version 8 loaded (active version: 8)
Applied preset: slack
Widening sandbox egress — adding: discord.com, gateway.discord.gg, cdn.discordapp.com, media.discordapp.net
✓ Policy version 9 submitted (hash: c4b43ab2846f)
✓ Policy version 9 loaded (active version: 9)
Applied preset: discord
Widening sandbox egress — adding: api.telegram.org
✓ Policy version 10 submitted (hash: 0bd5f6fdf97c)
✓ Policy version 10 loaded (active version: 10)
Applied preset: telegram
Widening sandbox egress — adding: *.atlassian.net, auth.atlassian.com, api.atlassian.com
✓ Policy version 11 submitted (hash: 3b7cf306a733)
✓ Policy version 11 loaded (active version: 11)
Applied preset: jira
Widening sandbox egress — adding: graph.microsoft.com, login.microsoftonline.com, outlook.office365.com, outlook.office.com
✓ Policy version 12 submitted (hash: 48737772cbc4)
✓ Policy version 12 loaded (active version: 12)
Applied preset: outlook
Widening sandbox egress — adding: host.openshell.internal, host.openshell.internal, host.openshell.internal
✓ Policy version 13 submitted (hash: a176881916b5)
✓ Policy version 13 loaded (active version: 13)
Applied preset: local-inference
✓ Deployment verified — gateway and dashboard are healthy.
OpenClaw version: 2026.4.24
──────────────────────────────────────────────────
Sandbox my-assistant (Landlock + seccomp + netns)
Model nemotron3:33b (Local Ollama)
──────────────────────────────────────────────────
Run: nemoclaw my-assistant connect
Status: nemoclaw my-assistant status
Logs: nemoclaw my-assistant logs --follow
OpenClaw UI (auth token redacted from displayed URLs)
Port 18789 must be forwarded before opening these URLs.
Dashboard: http://127.0.0.1:18789/
Token: nemoclaw my-assistant gateway-token --quiet
append #token=<token> locally if the browser asks for auth.
──────────────────────────────────────────────────
To change settings later:
Model: nemoclaw inference set --model <model> --provider <provider> --sandbox my-assistant
Policies: nemoclaw my-assistant policy-add
Credentials: nemoclaw credentials reset <KEY> then nemoclaw onboard
seeed@seeed:~$
考虑到我们未来可能需要在 NeMoClaw 容器内访问部署在主机上的服务,请执行以下命令为该应用配置网络访问。
nemoclaw my-assistant policy-add --from-file ~/rebot_arm_service/host-camera.yaml --yes
如果接入成功,运行:
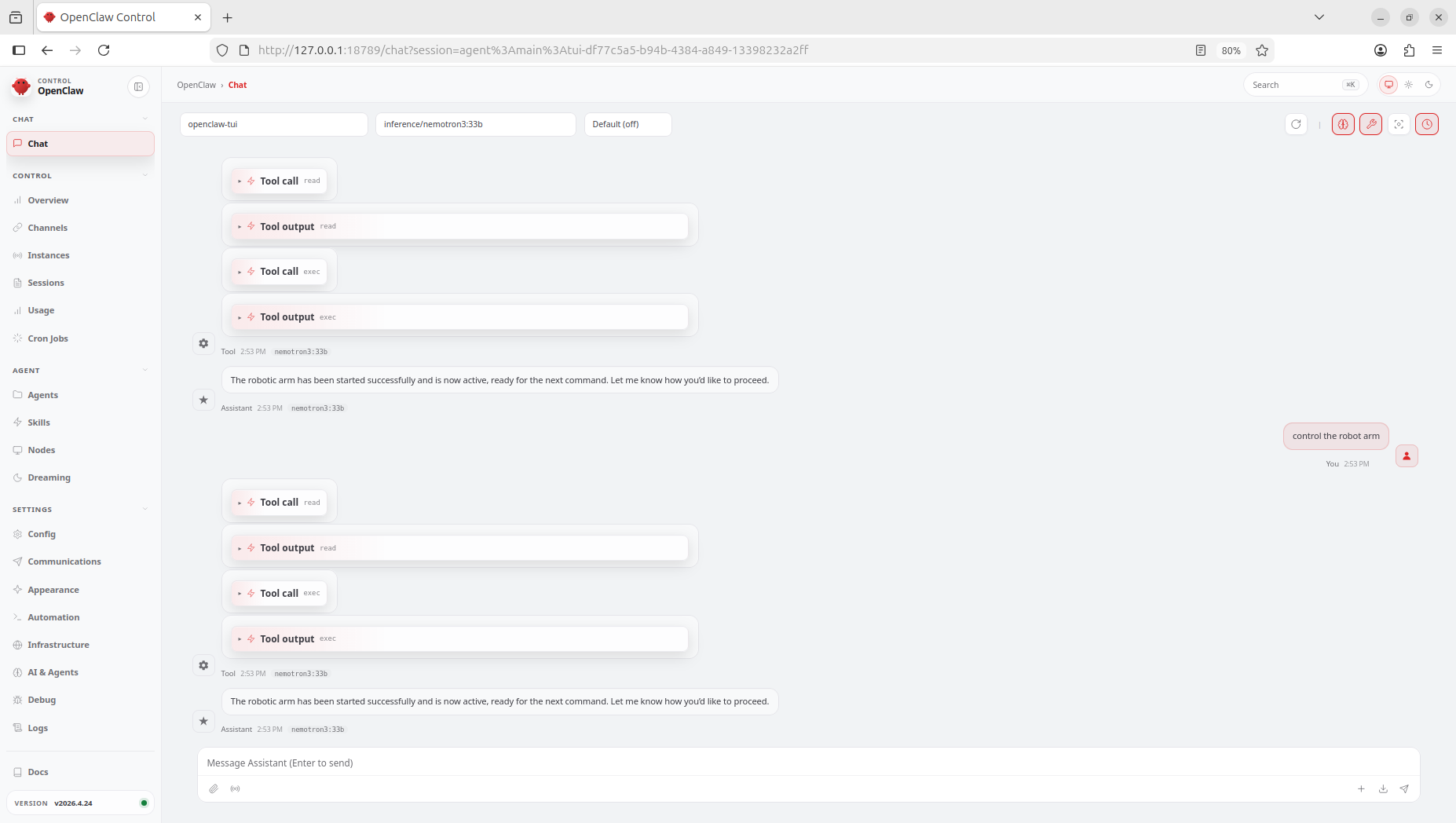
nemoclaw my-assistant connect
你应该进入一个可用的 OpenClaw 应用环境:
更多 NemoClaw CLI 详情: https://docs.nvidia.com/nemoclaw/latest/reference/cli-selection-guide.html
4.3 安装机械臂服务
在 Jetson 上运行:
git clone https://github.com/yuyoujiang/rebot_arm_service.git ~
cd ~/rebot_arm_service
uv sync
# Configure GPU PyTorch runtime libraries
export LD_LIBRARY_PATH=/home/seeed/rebot_arm_service/.venv/lib/python3.12/site-packages/nvpl/lib:/usr/local/lib/ollama/cuda_v12:$LD_LIBRARY_PATH
python -c "import torch; print(torch.cuda.is_available())"

5. 设备权限设置
有两种方式设置设备权限。
- 临时权限(重启后失效):
sudo chmod 666 /dev/ttyACM0
- 持久化 udev 规则(推荐):
echo 'SUBSYSTEM=="tty", KERNEL=="ttyACM0", MODE:="0666", GROUP:="dialout"' | sudo tee /etc/udev/rules.d/99-rebot-arm.rules
sudo udevadm control --reload-rules
sudo udevadm trigger
6. 启动服务
6.1 启动机械臂后端
cd ~/rebot_arm_service
export REBOT_CAMERA_DEVICE_INDEX=0
uv run rebot-arm-service
访问:
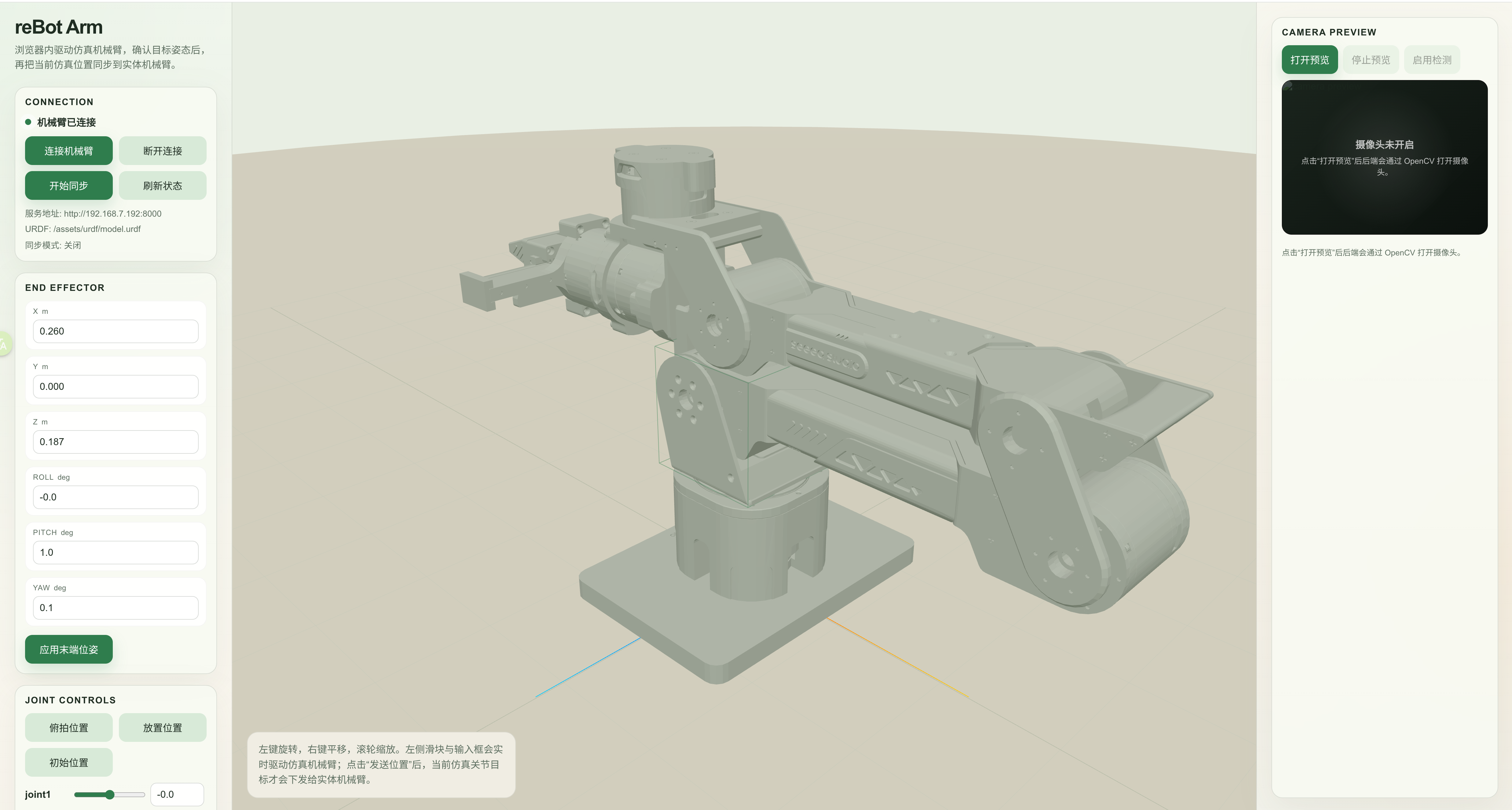
- WebUI:
http://127.0.0.1:8000/webui - 健康检查:
http://127.0.0.1:8000/healthz
6.2 启动键盘监听器(可选)
为了快速触发检测/抓取(无需等待较长的智能体推理时间),可以使用 F1 热键监听器。
当按下 F1 时,它会自动请求抓取任务端点。
直接运行:
cd ~/rebot_arm_service
sudo ./.venv/bin/python scripts/space_mission_listener_evdev.py
或通过脚本:
cd ~/rebot_arm_service
./scripts/start_space_listener_evdev.sh
6.3 启用开机自启动(可选)
配置两个 systemd 服务:
rebot-arm.service:后端服务
/etc/systemd/system/rebot-arm.service
[Unit]
Description=reBot Arm Backend Service
After=network-online.target
Wants=network-online.target
[Service]
Type=simple
User=seeed
WorkingDirectory=/home/seeed/rebot_arm_service
Environment=PYTHONUNBUFFERED=1
Environment=LD_LIBRARY_PATH=/home/seeed/rebot_arm_service/.venv/lib/python3.12/site-packages/nvpl/lib:/usr/local/lib/ollama/cuda_v12
ExecStart=/home/seeed/rebot_arm_service/.venv/bin/rebot-arm-service
Restart=always
RestartSec=2
[Install]
WantedBy=multi-user.target
rebot-f1-listener.service:F1 热键触发器
/etc/systemd/system/rebot-f1-listener.service
[Unit]
Description=reBot F1 Keyboard Listener
After=network-online.target rebot-arm.service
Wants=network-online.target
Requires=rebot-arm.service
[Service]
Type=simple
User=root
WorkingDirectory=/home/seeed/rebot_arm_service
Environment=PYTHONUNBUFFERED=1
Environment=MISSION_BASE_URL=http://127.0.0.1:8000
ExecStart=/home/seeed/rebot_arm_service/.venv/bin/python /home/seeed/rebot_arm_service/scripts/space_mission_listener_evdev.py
Restart=always
RestartSec=2
[Install]
WantedBy=multi-user.target
在启动服务之前,请先修改配置文件中的路径。
管理命令:
sudo systemctl daemon-reload
sudo systemctl enable --now rebot-arm.service rebot-f1-listener.service
systemctl status rebot-arm.service
sudo systemctl status rebot-f1-listener.service
日志:
journalctl -u rebot-arm.service -f
sudo journalctl -u rebot-f1-listener.service -f
7. 功能演示
8. 故障排查
-
串口忙(
Device or resource busy)
停止陈旧进程,然后重新连接。确保只有一个控制进程在使用机械臂。 -
WebUI 场景为空
检查 URDF 和 mesh 请求是否返回200,尤其是/assets/urdf/...。 -
检测没有响应
检查camera/status是否为running=true,然后检查任务状态端点。 -
Torch 导入失败,提示缺少库
确保LD_LIBRARY_PATH同时包含nvpl和cuda_v12路径。 -
F1 热键无效果
检查rebot-f1-listener.service日志,并确认它监听的是正确的键盘设备。 -
启动监听器后其他键盘按键失效
确保脚本未使用dev.grab()(必须移除独占键盘捕获)。 -
第二个机械臂连接失败
确保之前的连接已完全释放;在重新连接前调用断开连接。
9. 参考资料
- https://docs.nvidia.com/jetson/agx-thor-devkit/user-guide/latest/index.html
- https://github.com/Seeed-Projects/reBot-DevArm
- https://docs.nvidia.com/nemoclaw/latest/about/overview.html
- https://docs.openclaw.ai/
- https://wiki.seeedstudio.com/cn/lerobot_so100m_new/
10. 技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,确保你在使用我们产品的过程中尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。