如何通过 ROS 在 reComputer 上使用多个 CSI 摄像头
简介
本教程提供了如何通过 ROS 在 reComputer J30/J40 系列设备上读取多个 CSI 摄像头图像数据,并发布图像主题以在 RVIZ 可视化界面中显示的分步指南。

前提条件
-
reComputer J30/40 系列:确保您已按照提供的教程完成 JetPack 5.x 的安装 和 ROS Noetic 环境的安装。
-
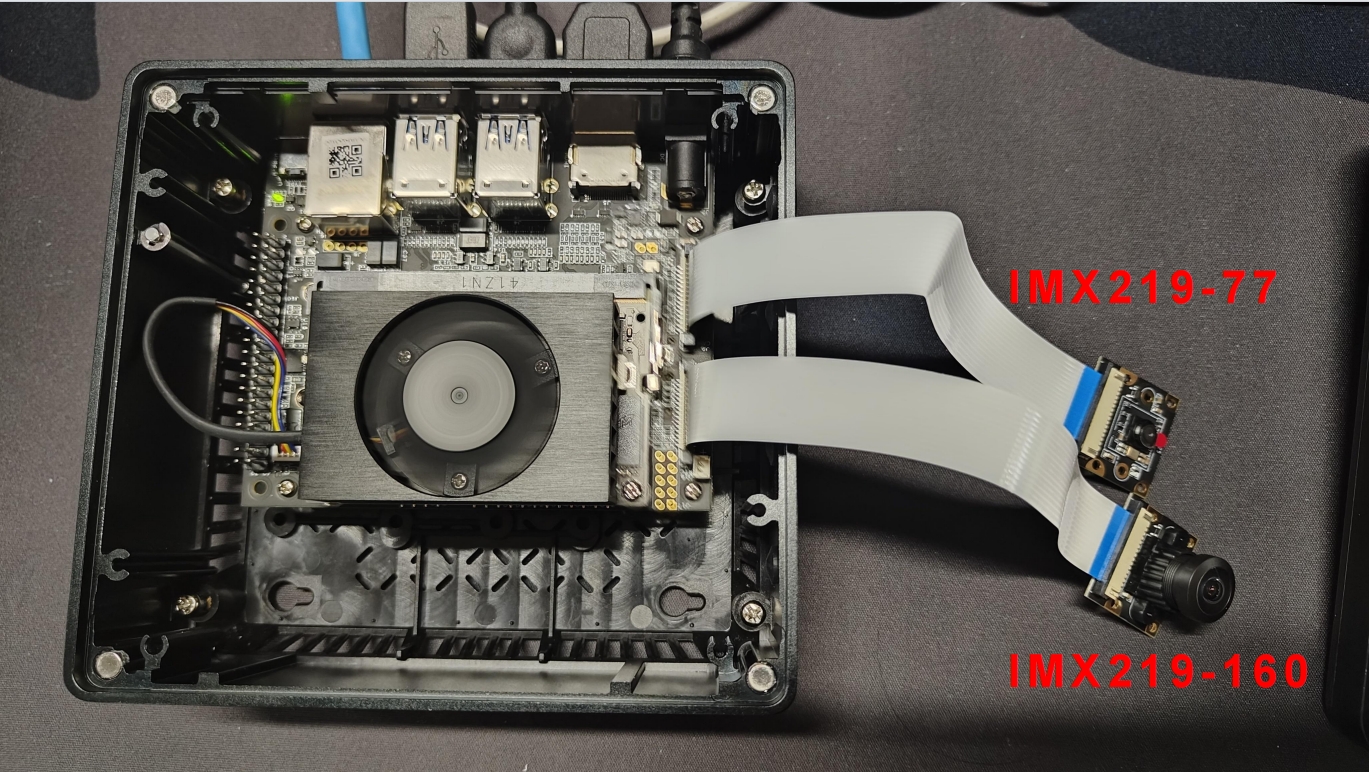
支持的摄像头如下:
-
IMX219 摄像头
-
IMX477 摄像头
-
入门指南
连接摄像头
请按照本教程完成 CSI 摄像头的连接和测试,并确保您的系统上已安装 ROS。
安装
-
步骤 1: 在您的 reComputer 上打开终端并创建工作空间目录:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src -
步骤 2: 克隆所需的 ROS 包:
git clone https://github.com/ZhuYaoHui1998/csi_camera_reader.git -
步骤 3: 构建工作空间:
cd ~/catkin_ws/
catkin_make -
步骤 4: 再次加载 setup 文件以更新环境:
source devel/setup.bash
使用方法
-
要将一个摄像头流发布到 ROS 主题 /csi_cam_0/image_raw,请在终端中使用以下命令:
roslaunch csi_camera_reader csi_camera.launch sensor_id:=0 -
您也可以将 sensor_id 更改为 1,以匹配您的接口:
roslaunch csi_camera_reader csi_camera.launch sensor_id:=1 -
如果您希望同时打开两个 CSI 摄像头并将主题发布到 ROS,可以执行以下命令:
roslaunch csi_camera_reader dual_camera.launch您可以在终端中输入 "rostopic list" 命令,查看摄像头发布的图像主题。

您还可以使用 RVIZ 可视化工具订阅图像主题并查看视觉信息。

技术支持与产品讨论
感谢您选择我们的产品!我们提供多种支持渠道,以确保您使用我们的产品时体验顺畅。我们提供多种沟通方式,以满足不同的偏好和需求。