在 Jetson AGX Orin 上部署 Depth Anything V3

简介
Depth Anything V3 是一个最先进的单目深度估计模型,通过从单个 RGB 图像生成高质量深度图来革新 3D 感知。与需要专用硬件或多摄像头输入的传统深度估计方法不同,Depth Anything V3 利用先进的深度学习技术,仅使用标准 2D 图像来预测准确的深度信息。这使其对于硬件约束和计算效率是关键考虑因素的边缘 AI 应用特别有价值。本 wiki 将指导您在 Jetson AGX Orin 上部署 Depth Anything V3,并集成 ROS2 用于实时机器人应用。

先决条件
- reComputer Mini J501 载板(Jetson AGX Orin),配备 JetPack 6.2
- USB 摄像头
- 已安装 ROS2 Humble 环境
技术亮点
-
高质量单目深度估计:Depth Anything V3 从单个 RGB 图像生成准确的深度图,无需专用深度传感器或立体摄像头设置。
-
针对边缘部署优化:该模型专为在 Jetson AGX Orin 等边缘设备上高效推理而设计,通过 TensorRT 优化实现最大性能。
-
实时处理:能够实时处理高分辨率图像,适用于自主导航、障碍物避免和机器人操作任务。
-
ROS2 集成:提供原生 ROS2 Humble 支持,具有深度图和点云发布功能,可无缝集成到机器人系统中。
-
灵活的输入支持:支持各种输入源,包括 USB 摄像头、ROS 图像话题和预录制视频流。
环境设置
步骤 1. 安装依赖项
sudo apt update
sudo apt install -y \
build-essential \
cmake \
git \
libopencv-dev \
python3-pip \
python3-colcon-common-extensions \
v4l-utils
步骤 2. 安装 Python 依赖项
pip3 install numpy opencv-python
步骤 3. 配置 CUDA 环境变量
# Add CUDA environment variables to .bashrc
echo '
# CUDA Environment
export CUDA_HOME=/usr/local/cuda
export PATH=$CUDA_HOME/bin:$PATH
export LD_LIBRARY_PATH=$CUDA_HOME/lib64:$LD_LIBRARY_PATH
export CUDACXX=$CUDA_HOME/bin/nvcc
' >> ~/.bashrc
# Reload shell configuration
source ~/.bashrc
# Verify CUDA installation
nvcc --version

步骤 4. 安装 ROS2 USB 摄像头包
# Install USB camera driver for ROS2
sudo apt install -y ros-humble-usb-cam
# Install additional ROS2 dependencies
sudo apt install -y ros-humble-cv-bridge
sudo apt install -y ros-humble-image-transport
sudo apt install -y ros-humble-image-geometry
sudo apt install -y ros-humble-cv-bridge ros-humble-image-transport ros-humble-rviz2
步骤 5. 设置 Depth Anything V3 ROS2 环境
# Clone the repository
git clone https://github.com/zibochen6/ros2-depth-anything-v3-trt.git
# Navigate to the project directory
cd ros2-depth-anything-v3-trt
步骤 6. 构建 ROS2 包
# Build the depth_anything_v3 package with Release configuration
colcon build --packages-select depth_anything_v3 --cmake-args -DCMAKE_BUILD_TYPE=Release
# Source the workspace
source install/setup.bash
步骤 7. 生成 TensorRT 引擎
在生成引擎文件之前,您需要提前下载 Depth Anything V3 的 .onnx 模型,并将其放置在 ros2-depth-anything-v3-trt/onnx 目录中。
# Make the engine generation script executable
chmod +x generate_engines.sh
# Generate TensorRT engines from ONNX models
./generate_engines.sh onnx
请耐心等待 .engine 文件的生成。转换完成后,将在 onnx 目录中创建两个文件,如下所示。

运行深度估计
摄像头深度估计
步骤 1. 连接 USB 摄像头
将您的 USB 摄像头连接到 Jetson AGX Orin 设备。验证摄像头是否被检测到:
# Check if USB camera is detected
ls /dev/video*
预期输出:
/dev/video0 /dev/video1
步骤 2. 摄像头标定
v4l2_camera 包充当 Linux Video4Linux2 (V4L2) API 和 ROS 2 话题之间的桥梁,发布可在标定流水线中轻松使用的图像和摄像头信息消息。
安装摄像头标定包:
# Install Camera Calibration Package
sudo apt install ros-humble-camera-calibration
# v4l2_camera is the official ROS2 maintained node that can directly publish USB camera images
sudo apt install ros-${ROS_DISTRO}-v4l2-camera
启动摄像头节点:
# Launch camera node
ros2 run v4l2_camera v4l2_camera_node \
--ros-args \
-p image_size:=[640,480] \
-p pixel_format:=YUYV
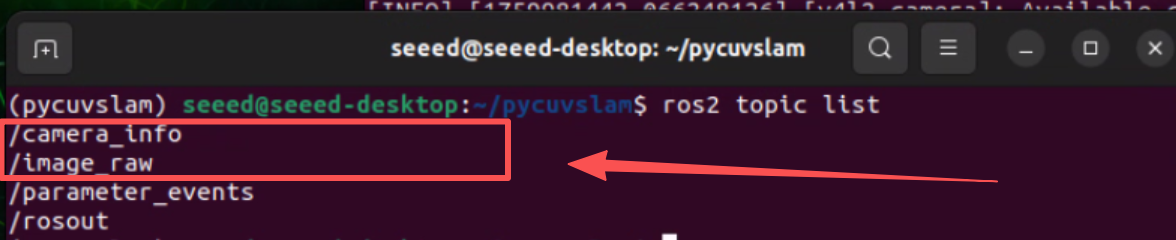
默认发布的话题有:
/image_raw- 原始摄像头图像/camera- 摄像头信息
运行摄像头标定:
# In another terminal
ros2 run camera_calibration cameracalibrator \
--size 8x6 \
--square 0.025 \
--fisheye-recompute-extrinsicsts \
--fisheye-fix-skew \
--ros-args --remap image:=/image_raw --remap camera:=/v4l2_camera
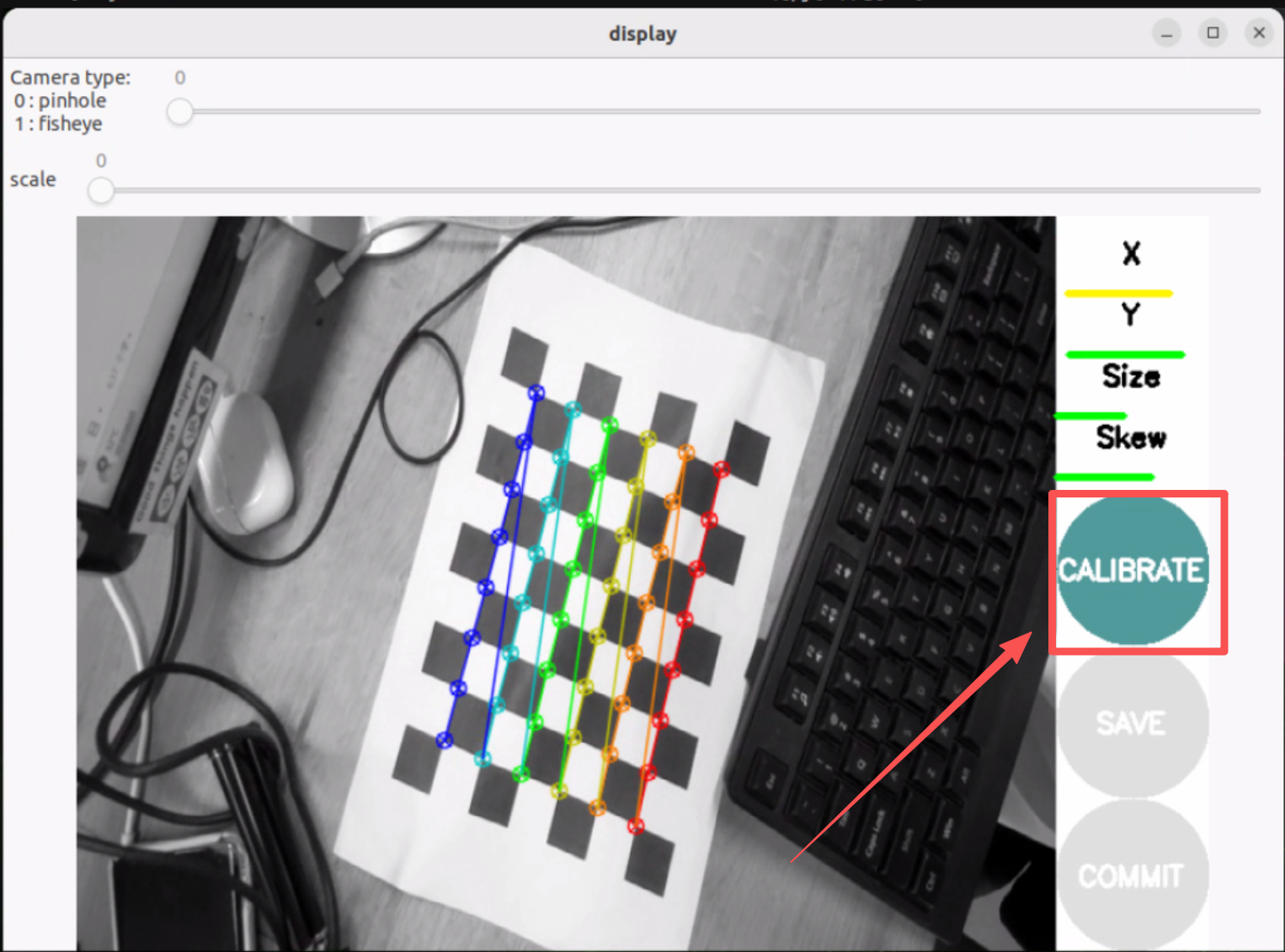
--size 8x6指的是内角点数量(8×6 = 48 个角点,对应 9×7 网格)--square 0.025指的是方格大小,单位为米(25mm)- 移动摄像头从不同角度捕获图像,直到
CALIBRATE按钮亮起
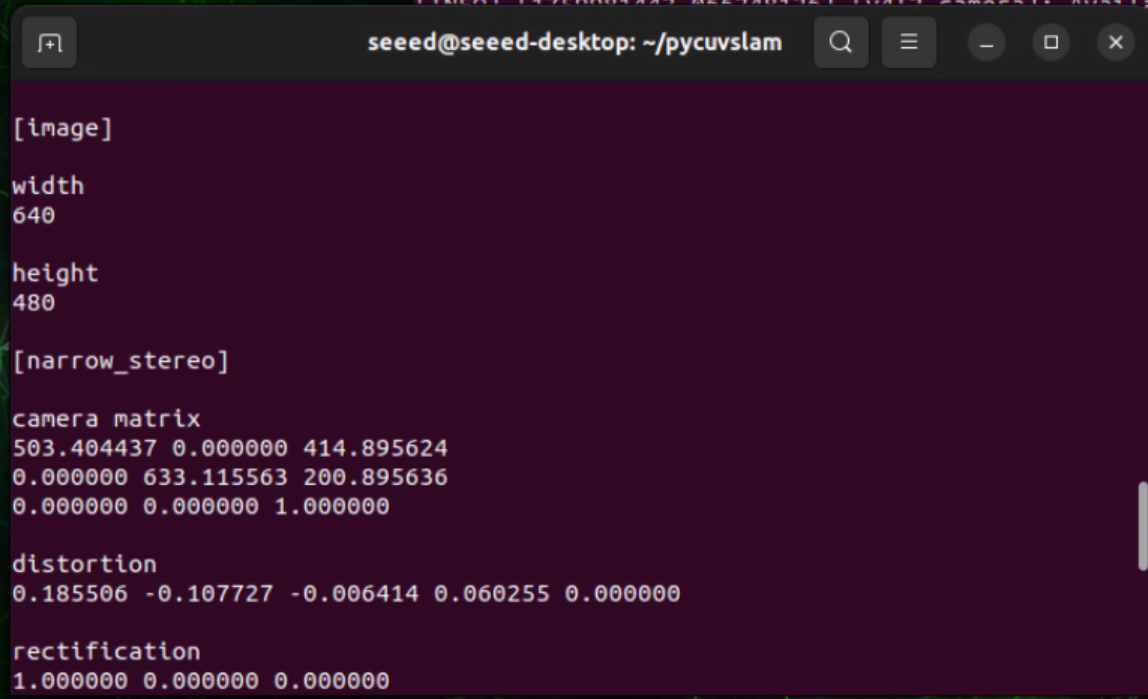
标定成功后,您将在终端中获得类似的摄像头参数:
您可以参考此 wiki 进行摄像头标定。
将标定参数写入 camera_info_example.yaml 文件
步骤 3. 启动 USB 摄像头节点
将标定参数保存到 camera_info_example.yaml 文件中,以校正 GMSL 摄像头的鱼眼畸变。然后,运行以下命令进行实时深度估计:
#Start the script for camera depth estimation
CAMERA_INFO_FILE=camera_info_example.yaml ENABLE_UNDISTORTION=1 ./run_camera_depth.sh
视频深度估计
步骤 1. 准备视频文件
准备一个用于深度估计的视频文件。
步骤 2. 启动视频深度估计节点
#Start the script for video depth estimation
./run_video_depth.sh
参考资料
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。