在 reComputer(NVIDIA Jetson)设备上部署 Frigate

Frigate 是一个开源的 NVR(网络视频录像机),具有针对 IP 摄像头的实时对象检测功能。在本指南中,我们将逐步介绍如何在 NVIDIA Jetson 设备上部署 Frigate。NVIDIA Jetson 是一个边缘 AI 平台,能够高效部署 AI 工作负载。将 Frigate 与 Jetson 结合使用,可以利用硬件加速的机器学习来高效处理视频流并检测对象。
项目目标:
- 在 NVIDIA Jetson 设备上设置 Frigate 环境,以实现高效的视频处理。
- 在来自多个 IP 摄像头的视频流上启用实时对象检测。
在本项目结束时,用户将拥有一个完全可操作的监控系统,该系统可以实时检测对象、发送警报并与其他智能设备集成。此解决方案不仅增强了安全性,还确保处理在本地完成,保护隐私并减少对云服务的依赖。
硬件准备
要在 NVIDIA Jetson 上使用 IP 摄像头成功部署 Frigate,您需要准备以下硬件组件。本节概述了必要的设备并提供简要描述,以帮助您开始使用。
1. NVIDIA Jetson 设备:
NVIDIA Jetson 设备作为运行 Frigate 和执行实时对象检测的中央处理单元。根据您的需求和预算,您可以从几个型号中选择:
- Jetson Nano:一个经济实惠的选择,具有足够的处理能力,适用于少数摄像头的小规模监控设置。
- Jetson Xavier NX:提供更多功率,可以处理更大规模的部署或更复杂的对象检测任务。
- Jetson Orin 系列:最强大的选择,适用于高性能应用和多摄像头设置。
所需配件:
- 适合 Jetson 型号的电源。
- 至少 32GB 容量的 MicroSD 卡(用于 Jetson Nano 和 Orin)或 eMMC(用于 Jetson Xavier NX/AGX Orin)。
- 冷却解决方案(例如风扇或散热器)以确保最佳工作温度。 用于初始设置的显示器、键盘和鼠标。
2. IP 摄像头:
IP 摄像头提供高质量的视频源,这对于有效的对象检测至关重要。您至少需要一个与 RTSP(实时流协议)兼容的大华 IP 摄像头,这允许 Frigate 接收视频流。
3. 所需硬件总结:
- Jetson 设备:Jetson Nano、Xavier NX 或 Orin 系列
- IP 摄像头:与 RTSP 兼容
- MicroSD 卡/eMMC:至少 32GB(用于 Jetson 设置)
- 电源和冷却:用于 Jetson 设备
- 网络设备:以太网电缆
- 可选:外部存储、PoE 注入器/交换机
软件准备
设置软件环境是在您的 NVIDIA Jetson 设备上部署 Frigate 的关键步骤。本节概述了必要的软件组件和安装步骤,以确保您的系统准备好运行 Frigate 并处理来自 IP 摄像头的视频流。
1. 操作系统(Jetpack)
确保您的 NVIDIA Jetson 设备运行最新版本的 NVIDIA JetPack SDK。JetPack 提供基于 Linux 的操作系统以及 AI 开发所需的基本库和工具。
-
下载 JetPack SDK:访问 NVIDIA JetPack 下载页面,下载与您的 Jetson 设备兼容的最新 JetPack SDK(我使用的是 Jetpack 5.1.3 配合 Xavier NX)。
-
刷写 Jetson 设备:使用 SDK Manager 将 JetPack 镜像刷写到 Jetson 设备的 SD 卡(适用于 Jetson Nano)或 eMMC(适用于 Jetson Xavier NX/AGX Orin)。
对于 Seeed Jetson 驱动设备的刷写指南,请参考以下链接:
- reComputer J1010 | J101
- reComputer J2021 | J202
- reComputer J1020 | A206
- reComputer J4012 | J401
- A203 载板
- A205 载板
- Jetson Xavier AGX H01 套件
- Jetson AGX Orin 32GB H01 套件
2. 系统更新和依赖项:
设置操作系统后,执行系统更新并安装所需的依赖项。
更新系统:在 Jetson 设备上打开终端并运行:
sudo apt-get update && sudo apt-get upgrade
安装额外依赖项:安装在 Jetson 上构建和运行软件所需的常用依赖项:
sudo apt-get install -y \
python3-pip \
python3-dev \
python3-venv \
build-essential \
libssl-dev \
libffi-dev \
git
2. Docker 安装:
Frigate 作为 Docker 容器运行。使用以下步骤在 Jetson 设备上安装 Docker:
1. 安装 docker:
- 安装 Docker 的依赖项:
sudo apt-get install -y apt-transport-https ca-certificates curl software-properties-common
- 添加 Docker 的官方 GPG 密钥:
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
- Add Docker repository:
sudo add-apt-repository "deb [arch=arm64] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable"
- install docker:
sudo apt-get update
sudo apt-get install -y docker-ce
2. Docker Compose 安装:
Docker Compose 用于定义和运行多容器 Docker 应用程序,例如 Frigate,并处理 yaml 文件来运行 docker 容器。
- 安装 Docker Compose:使用以下命令安装 Docker Compose:
sudo apt-get install -y python3-pip
sudo pip3 install docker-compose
- 验证 Docker Compose 安装:
docker-compose --version
3. NVIDIA Container Toolkit
要安装 Nvidia 容器工具包,您可以访问参考资料中的链接。根据您的系统,您可以按照以下安装指南进行操作。您需要安装它才能在 docker 容器中使用 GPU。
4. Frigate 配置:
- 设置配置目录:创建一个目录来存放 Frigate 配置文件:
mkdir ~/frigate
cd ~/frigate
- 创建配置文件:您需要在 ~/frigate 目录中创建 docker-compose.yml 和 config.yml 文件。这些文件将定义 Frigate 的部署方式以及它如何连接到您的 IP 摄像头。docker-compose.yml 定义了 Frigate 的 Docker 服务,config.yml:指定 Frigate 设置,如摄像头流、检测设置和 MQTT 集成。
通过完成这些步骤,您的 NVIDIA Jetson 设备将完全准备好运行 Frigate,您将准备好继续部署 Frigate 并集成您的 IP 摄像头进行实时物体检测。
入门指南
现在您已经准备好硬件并设置好软件环境,是时候在您的 NVIDIA Jetson 设备上部署 Frigate 并将其连接到您的大华 IP 摄像头了。按照以下步骤开始您的部署:
1. 拉取 Frigate docker 镜像:
在 Frigate 网站中,使用 compose 在 Docker 中运行是推荐的安装方法。首先,您需要拉取针对 TensorRT 优化的 Frigate Docker 镜像。此镜像专门设计用于利用 NVIDIA Jetson 设备的 GPU 功能进行高效的物体检测。
这里我们在 JP5.1.3 上工作,拉取请求是:
docker pull ghcr.io/blakeblackshear/frigate:stable-tensorrt-jp5
当前稳定版本的官方 docker 镜像标签有:
- stable : 适用于 amd64 的标准 Frigate 构建版本 & 适用于 arm64 的 RPi 优化 Frigate 构建版本
- stable-standard-arm64 : 适用于 arm64 的标准 Frigate 构建版本
- stable-tensorrt : 专为运行 nvidia GPU 的 amd64 设备构建的 Frigate 版本
当前稳定版本的社区支持 docker 镜像标签有:
- stable-tensorrt-jp5 : 为运行 Jetpack 5 的 nvidia Jetson 设备优化的 Frigate 构建版本
- stable-tensorrt-jp4 : 为运行 Jetpack 4.6 的 nvidia Jetson 设备优化的 Frigate 构建版本
- stable-rk : 适用于搭载 Rockchip SoC 的单板计算机的 Frigate 构建版本
- stable-rocm : 适用于 AMD GPU 和集成显卡的 Frigate 构建版本
您可以根据您的部署情况使用这些标签中的任何一个。但在这里我们使用的是 Jetson 和 tensorrt 以及 Jetpack 5.1.3,所以我们需要拉取 'stable-tensorrt-jp5'。这个 docker 镜像包含了运行 Frigate 所需的所有软件包,无需安装 tensorrt 等其他组件。
2. 准备 Frigate 配置文件:
在开始部署之前,您需要配置 Frigate 以适配您的特定设置,包括摄像头流和检测设置。
config.yml 文件:此文件将包含 Frigate 的配置,包括摄像头设置和检测参数。使用文本编辑器创建一个名为 config.yml 的新文件,并添加以下内容。此配置在 NVIDIA Jetson 设备上设置 Frigate,使用 TensorRT 从大华 IP 摄像头进行高效的目标检测。
mqtt:
enabled: False
cameras:
dummy_camera: # <--- this will be changed to your actual camera later
enabled: True
ffmpeg:
hwaccel_args: preset-jetson-h264
inputs:
- path: rtsp://admin:[email protected]:554/cam/realmonitor?channel=1&subtype=0
roles:
- detect
birdseye:
enabled: True
mode: objects
detectors:
tensorrt:
type: tensorrt
device: 0 #This is the default, select the first GPU
model:
path: /config/model_cache/tensorrt/yolov7-320.trt
input_tensor: nchw
input_pixel_format: rgb
width: 320
height: 320
detect:
fps : 20
width: 1280
height: 720
objects:
track:
- person
关键点包括:
MQTT 已禁用:MQTT 集成已关闭,因此 Frigate 不会通过 MQTT 发送检测事件。
摄像头设置:启用了一个名为 dummy_camera 的占位符摄像头,通过 FFmpeg 使用硬件加速处理 H.264 视频流。它使用 RTSP URL 连接到大华 IP 摄像头进行检测。
鸟瞰视图已启用:提供概览显示,仅显示来自所有摄像头源的检测对象。
TensorRT 检测器:在主 GPU 上使用 TensorRT 进行推理,优化检测速度和效率。
模型详情:指定用于对象检测的 TensorRT 优化 YOLOv7 模型,输入尺寸为 320x320,RGB 格式。
检测设置:以每秒 20 帧的速度处理视频,检测分辨率为 1280x720。 对象跟踪:配置为仅跟踪人员,减少计算负载并专注于相关检测。
2. 准备 docker-compose.yml 文件:
此文件定义了 Frigate 服务以及如何使用 Docker Compose 运行它。在同一目录中创建一个名为 docker-compose.yml 的新文件,内容如下:
services:
frigate:
privileged: true
environment:
- YOLO_MODELS=yolov7-320
- USE_FP16=false
container_name: frigate
runtime: nvidia
#devices:
#- /dev/video0:/dev/video0
volumes:
- /home/jetson/frigate/config:/config
- /home/jetson/frigate/storage:/media/frigate
#- type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
#target: /tmp/cache
#tmpfs:
#size: 1000000000
ports:
- "5000:5000"
- "8554:8554"
image: ghcr.io/blakeblackshear/frigate:stable-tensorrt-jp5
提供的代码片段似乎是 Docker Compose 设置中 Frigate 服务的配置。Frigate 是一个开源的 AI 驱动视频监控系统,可用于实时检测和跟踪对象。
以下是配置的详细说明:
-
services:此部分定义了将成为 Docker Compose 设置一部分的服务。
-
frigate:这是 Frigate 容器的服务名称。
-
privileged: true:这为 Frigate 容器授予特权访问权限,通常需要此权限来访问摄像头等硬件设备。
-
environment:此部分为 Frigate 容器设置两个环境变量:
YOLO_MODELS=yolov7-320:指定用于对象检测的 YOLO(You Only Look Once)模型。USE_FP16=false:禁用 16 位浮点精度的使用,这可以在某些硬件上提高性能。
-
container_name: frigate:设置 Frigate 容器的名称。
-
runtime: nvidia:指定用于 Frigate 容器的运行时环境,在这种情况下是用于 GPU 加速处理的 NVIDIA 运行时。
-
volumes:挂载以下目录:
/home/jetson/frigate/config:/config:将本地配置目录挂载到容器的/config目录。/home/jetson/frigate/storage:/media/frigate:将本地存储目录挂载到容器的/media/frigate目录。- 注释掉的行显示了使用 tmpfs(内存文件系统)进行缓存的可选配置,这有助于减少存储设备的磨损。
-
ports:暴露以下端口:
5000:5000:将容器的端口 5000 映射到主机的端口 5000。8554:8554:将容器的端口 8554 映射到主机的端口 8554。
-
image: ghcr.io/blakeblackshear/frigate:stable-tensorrt-jp5:指定用于 Frigate 容器的 Docker 镜像,在这种情况下是来自 GitHub Container Registry 上
blakeblackshear/frigate仓库的stable-tensorrt-jp5标签。
此配置在 Docker Compose 环境中设置了一个 Frigate 服务,提供了一种运行 Frigate 视频监控系统的方式,并支持自定义设置和硬件加速。
3. 使用 Docker Compose 部署 Frigate:
设置好配置文件并拉取 Docker 镜像后,您现在可以使用 Docker Compose 部署 Frigate。
- 导航到 Frigate 目录:确保您在创建配置文件的目录中:
cd ~/frigate
- 使用 Docker Compose 启动 Frigate:运行以下命令来启动 Frigate:
docker-compose up -d
此命令以分离模式启动 Frigate 服务。Docker 容器现在将在后台运行。
- 验证 Frigate 是否正在运行:通过使用以下命令检查 Frigate 容器是否正在运行:
docker ps
- 运行 docker 后,您可以看到 Tensorrt 日志,这意味着 Frigate 正在 GPU 上运行。

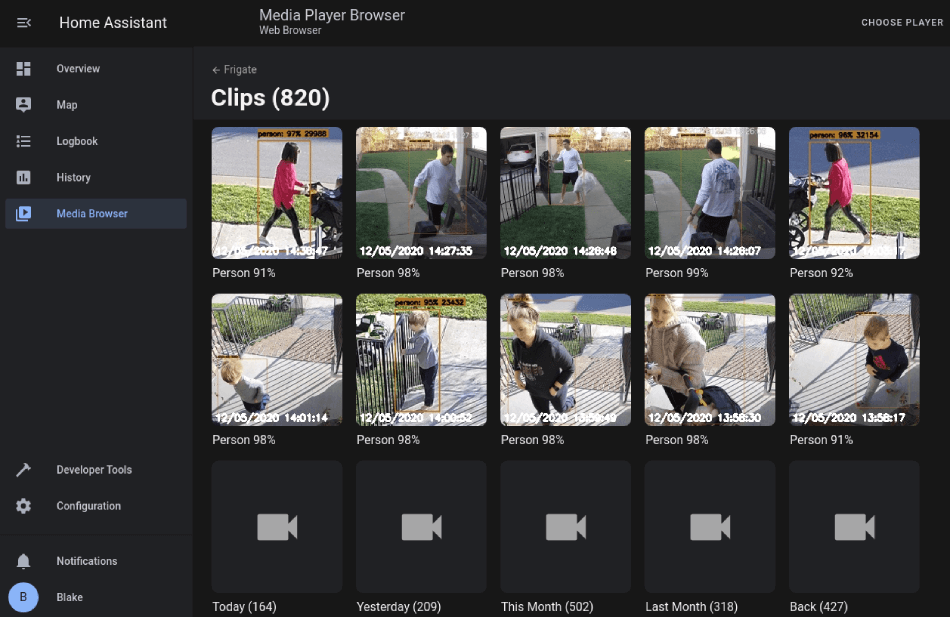
4. 访问 Frigate Web 界面:
一旦 Frigate 启动并运行,您可以访问 web 界面来监控视频流并配置设置:
- 打开 Web 浏览器:在连接到与您的 Jetson 设备相同网络的设备上,打开 web 浏览器。
- 输入 Jetson 设备的 IP 地址:在地址栏中,输入您的 Jetson 设备的 IP 地址,后跟端口 5000(例如,
http://jetson-ip-address:5000或http://127.0.0.1:5000)。 - 查看仪表板:Frigate 仪表板将显示来自连接的大华 IP 摄像头的实时视频流、检测事件和配置选项。
- 现在您可以通过 jtop 或在 frigate 系统中检查 Jetson 是否正在使用 GPU 进行检测。下面我们可以看到检测部分每帧运行约 33ms。


故障排除
在硬件连接、软件调试或上传过程中可能会遇到一些问题,特别是在运行 docker 时。您可以使用 docker log 来解决错误。
docker logs frigate
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。