在 Jetson AGX Orin 上使用 Orbbec 相机部署 NVBlox

介绍
Isaac ROS NVBlox 是由 NVIDIA 开发的高性能 GPU 加速 3D 建图框架,用于实时机器人感知。与单目深度估计算法不同,NVBlox 使用来自 RGB-D 相机或双目相机的真实深度输入来构建精确的 3D 场景表示。
它可以实时构建稠密的 TSDF(截断符号距离场)和 ESDF(欧几里得符号距离场)地图,从而实现高质量 3D 重建、考虑障碍物的导航以及碰撞检测。NVBlox 还可以生成网格、基于体素的代价地图以及适用于自主移动机器人(AMR)的 3D 占用表示。
这使其在硬件资源和计算效率至关重要的边缘 AI 应用中尤为有价值。本文档演示如何在 Jetson AGX Orin 上集成 ROS 2 部署 Isaac ROS NVBlox,并结合 Orbbec RGB-D 相机 和移动机器人平台,实现完全在设备端运行的感知与导航流水线。 🚀

前置条件
- reComputer J50(Jetson AGX Orin),已安装 JetPack 6.2.1
- Orbbec RGB-D 相机 📷
- 移动机器人底盘(可选)🤖
- 已安装 ROS2 Humble 环境
- 需要安装 Orbbec ROS2 SDK
- 需要安装 Isaac ROS

技术亮点
-
实时 3D 建图:NVBlox 使用 GPU 加速实时生成稠密 TSDF 和 ESDF 地图,为机器人应用提供高质量 3D 场景重建。
-
RGB-D 相机集成:利用 Orbbec RGB-D 相机的真实深度信息创建精确的 3D 表示,而无需依赖单目深度估计。
-
针对边缘部署优化:专为 Jetson AGX Orin 等边缘设备上的高效推理而设计,并通过 CUDA 优化以获得最大性能。
-
面向导航的输出:生成网格、基于体素的代价地图和 3D 占用栅格,适用于自主导航和避障。
-
原生 ROS2 支持:提供与 ROS2 Humble 的无缝集成,支持标准机器人消息类型,便于集成到现有机器人系统中。
环境配置
安装基础依赖
在终端中安装以下依赖:
sudo apt update
sudo apt-get install python3-pip # Install Python3
sudo apt-get install nvidia-jetpack # Install developer tools
sudo pip3 install jetson-stats # Install Jtop to check JetPack version
sudo apt-get install git-lfs # Install Git LFS
安装 Docker CE
更新软件源:
sudo apt-get update
安装基础依赖:
sudo apt-get install \
apt-transport-https \
ca-certificates \
curl \
software-properties-common # Install essential packages to allow apt over HTTPS
添加 Docker 官方 GPG 密钥:
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
添加 Docker 稳定版软件源:
sudo add-apt-repository \
"deb [arch=arm64] https://download.docker.com/linux/ubuntu \
$(lsb_release -cs) \
stable"
再次更新软件包列表(已添加新源):
sudo apt-get update
安装 Docker CE(社区版):
sudo apt-get install docker-ce
确保 Docker 启动:
sudo systemctl enable docker
sudo systemctl start docker
添加权限(将用户加入 Docker 组):
sudo usermod -aG docker $USER
重启系统或注销登录:
sudo reboot
安装 Isaac ROS 3.2
创建工作空间并加入环境变量:
mkdir -p ~/workspaces/isaac_ros-dev/src
echo "export ISAAC_ROS_WS=${HOME}/workspaces/isaac_ros-dev/" >> ~/.bashrc
source ~/.bashrc
进入工作空间并克隆软件包:
cd ${ISAAC_ROS_WS}/src
git clone -b release-3.2 https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common.git
拉取官方 Isaac Common Docker 镜像并进入 Docker:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
运行 ./scripts/run_dev.sh 将自动安装 Isaac ROS 并启动容器。
安装 Isaac ROS 需要在终端登录 NVIDIA NGC,并输入由你的 NGC 账号生成的 API Key 🔑
安装 Orbbec SDK ROS2
使用 Orbbec RGB-D 相机需要安装 SDK 驱动。本指南采用从源码构建的方式。
安装依赖:
sudo apt install libgflags-dev nlohmann-json3-dev \
ros-$ROS_DISTRO-image-transport ros-${ROS_DISTRO}-image-transport-plugins ros-${ROS_DISTRO}-compressed-image-transport \
ros-$ROS_DISTRO-image-publisher ros-$ROS_DISTRO-camera-info-manager \
ros-$ROS_DISTRO-diagnostic-updater ros-$ROS_DISTRO-diagnostic-msgs ros-$ROS_DISTRO-statistics-msgs ros-$ROS_DISTRO-xacro \
ros-$ROS_DISTRO-backward-ros libdw-dev libssl-dev mesa-utils libgl1 libgoogle-glog-dev
创建 colcon 工作空间:
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone https://github.com/orbbec/OrbbecSDK_ROS2.git
cd OrbbecSDK_ROS2
git checkout v2-main
进入工作目录并编译:
cd ~/ros2_ws
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
为了让 Orbbec 相机在 Linux 上被正确识别,需要安装 udev 规则。
进入源码工作目录并运行脚本:
cd ~/ros2_ws/src/OrbbecSDK_ROS2/orbbec_camera/scripts
sudo bash install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
如果不执行该脚本,打开设备时会因为权限问题而失败,你将需要使用 sudo(管理员权限)来运行示例程序。⚠️
部署 NVBlox
构建 NVBlox
获取适配 Orbbec 相机的 NVBlox 源码并复制到工作目录:
git clone https://github.com/jjjadand/isaac-NVblox-Orbbec.git
cp -r isaac-NVblox-Orbbec/src/isaac_ros_nvblox/ ${ISAAC_ROS_WS}/src/
cp -r isaac-NVblox-Orbbec/src/isaac_ros_nitros/ ${ISAAC_ROS_WS}/src/
cp -r isaac-NVblox-Orbbec/build/ ${ISAAC_ROS_WS}/
进入工作空间并启动 Isaac ROS Docker 容器:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
(可选)如果你遇到类似如下的错误:
Finished pulling pre-built base image: nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble_4c0c55dddd2bbcc3e8d5f9753bee634c
Nothing to build, retagged nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble_4c0c55dddd2bbcc3e8d5f9753bee634c as isaac_ros_dev-aarch64
Running isaac_ros_dev-aarch64-container
docker: Error response from daemon: failed to create task for container: failed to create shim task: OCI runtime create failed: could not apply required modification to OCI specification: error modifying OCI spec: failed to inject CDI devices: unresolvable CDI devices nvidia.com/gpu=all
你可以尝试在终端中运行以下命令进行修复:
sudo nvidia-ctk cdi generate --mode=csv --output=/etc/cdi/nvidia.yaml
成功启动容器后,你应当会看到类似如下的界面:
安装额外依赖:
sudo apt update
sudo apt-get install -y ros-humble-magic-enum
sudo apt-get install -y ros-humble-foxglove-msgs
将 CUDA 环境变量添加到 .bashrc:
echo '
CUDA_HOME=/usr/local/cuda
export PATH=$CUDA_HOME/bin:$PATH
export LD_LIBRARY_PATH=$CUDA_HOME/lib64:$LD_LIBRARY_PATH
export CUDACXX=$CUDA_HOME/bin/nvcc
' >> ~/.bashrc
创建符号链接:
sudo ln -sf /opt/ros/humble/include/magic_enum.hpp /usr/include/magic_enum.hpp
sudo mkdir -p /opt/ros/humble/include/foxglove_msgs
sudo ln -sfn /opt/ros/humble/include/foxglove_msgs/foxglove_msgs/msg /opt/ros/humble/include/foxglove_msgs/msg
在 /workspaces/isaac_ros-dev 中构建并初始化工作空间:
colcon build --symlink-install --cmake-args -DBUILD_TESTING=OFF
source install/setup.bash
编译完成后,你应当会看到类似如下的结果:
启动 NVBlox
将 Orbbec 相机通过数据线连接到 Jetson 后,首先在本地环境中启动 Orbbec ROS2 脚本:
cd ~/ros2_ws/src
source install/setup.bash
ros2 launch orbbec_camera <camera_name>.launch.py
# Example: ros2 launch orbbec_camera gemini2.launch.py
以下是部分支持的 <camera_name> 参数:
- gemini210
- gemini2
- gemini2L
- gemini_330_gmsl
- gemini_330_series
请注意,不要在 Docker 容器内启动 Orbbec 脚本。请确保你已经按照前文教程安装好 Orbbec 驱动。⚠️
Isaac ROS 容器默认与本地发布的 ROS2 进行桥接。在 Docker 容器中输入:
ros2 topic list
通常情况下,你应该能在 Docker 容器中看到 Orbbec 相机发布的以下数据主题:
/camera/accel/imu_info
/camera/color/camera_info
/camera/color/image_raw
/camera/depth/camera_info
/camera/depth/image_raw
/camera/depth/points
/camera/depth_filter_status
/camera/device_status
/camera/gyro/imu_info
/camera/gyro_accel/sample
/camera/ir/camera_info
/camera/ir/image_raw
确保你可以读取 Orbbec 相机的数据主题。然后在 Isaac ROS 容器中启动 NVBlox 示例脚本:
cd ~/workspaces/isaac_ros-dev
source install/setup.bash
ros2 launch nvblox_examples_bringup orbbec_example.launch.py
你可以在 RViz 中看到 NVBlox 输出的 3D 占用栅格和网格:
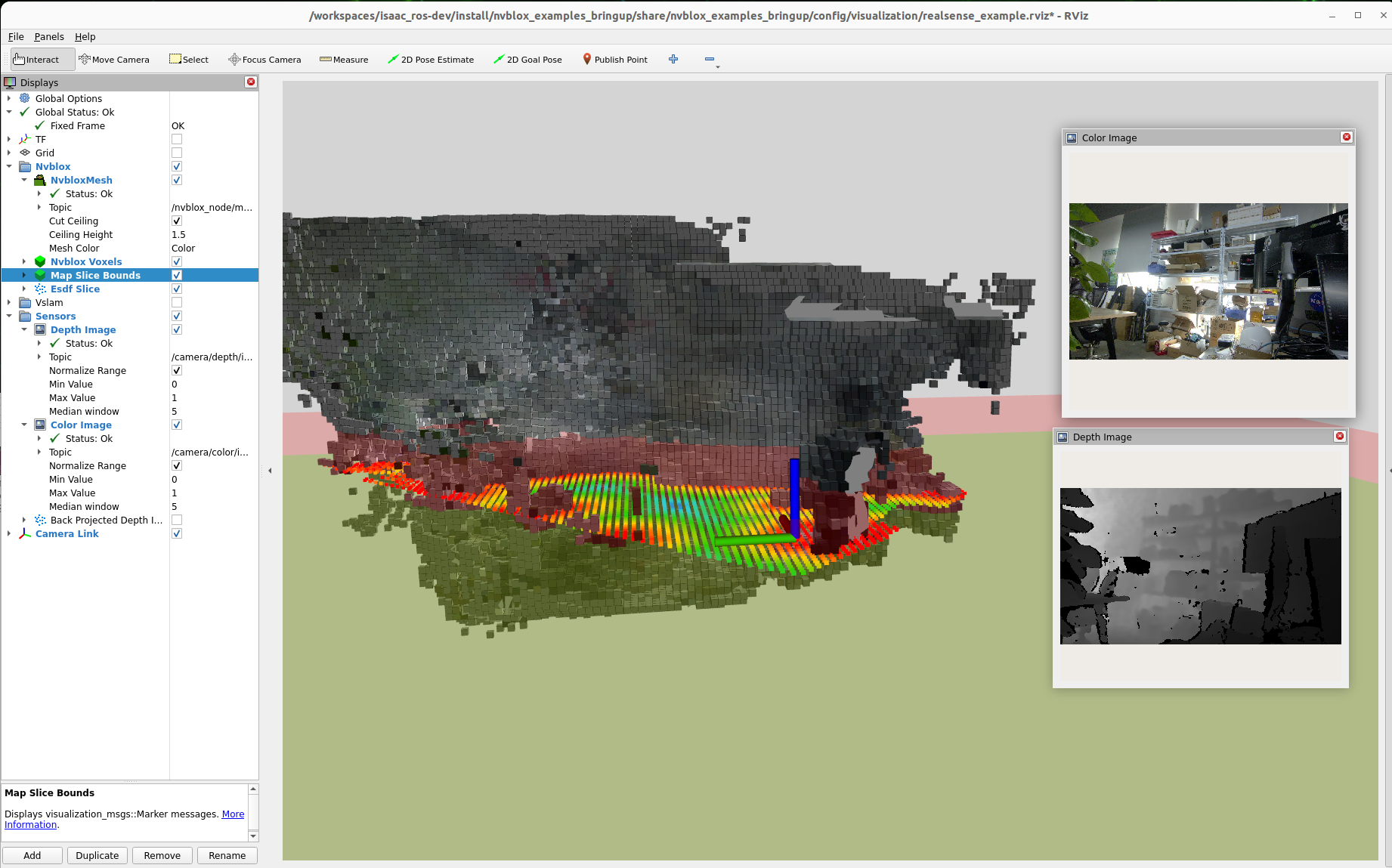
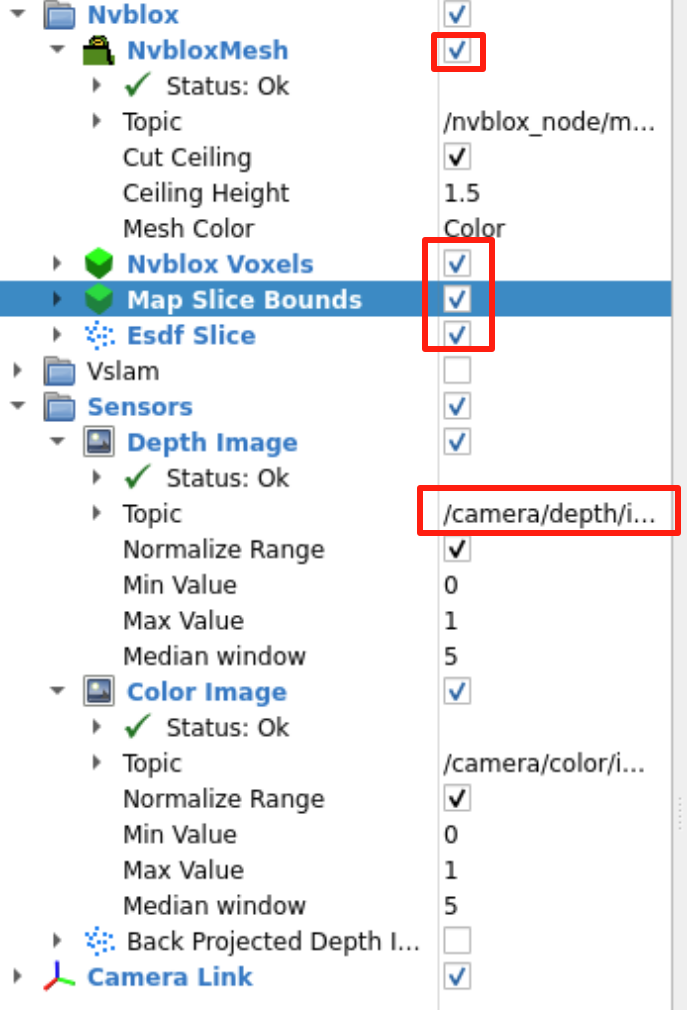
RViz 可以按如下方式进行配置。启用你想要的可视化结果,并选择可用的主题名称:
最后,通过将 AGX Orin 和 Orbbec 相机安装在移动 AGV 上,你可以实现视频中所示的效果:🎥
这可以用于移动机器人进行障碍物检测,并构建场景的 3D 网格地图。🤖
参考资料
- Isaac ROS Common GitHub 仓库
- Isaac ROS NVBlox GitHub 仓库
- Isaac NVBlox Orbbec GitHub 仓库
- ROS2 Humble 文档
- Orbbec SDK ROS2 文档
技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,以确保你在使用我们产品时拥有尽可能顺畅的体验。我们提供多种沟通渠道,以满足不同的偏好和需求。