DM_Gripper - 装配指南
DM_Gripper 采用便于装配/拆卸的结构与开源设计理念。这使得爱好者和开发者能够通过 3D 打印快速完成原型制作,或根据个性化需求进行重新设计。
该夹爪具备可更换的爪体系统,能够轻松替换不同形状的爪体以适配多种使用场景。所有零件均可在家用 3D 打印机打印完成,仅需最少的支撑。本维基提供了逐步的装配指南。
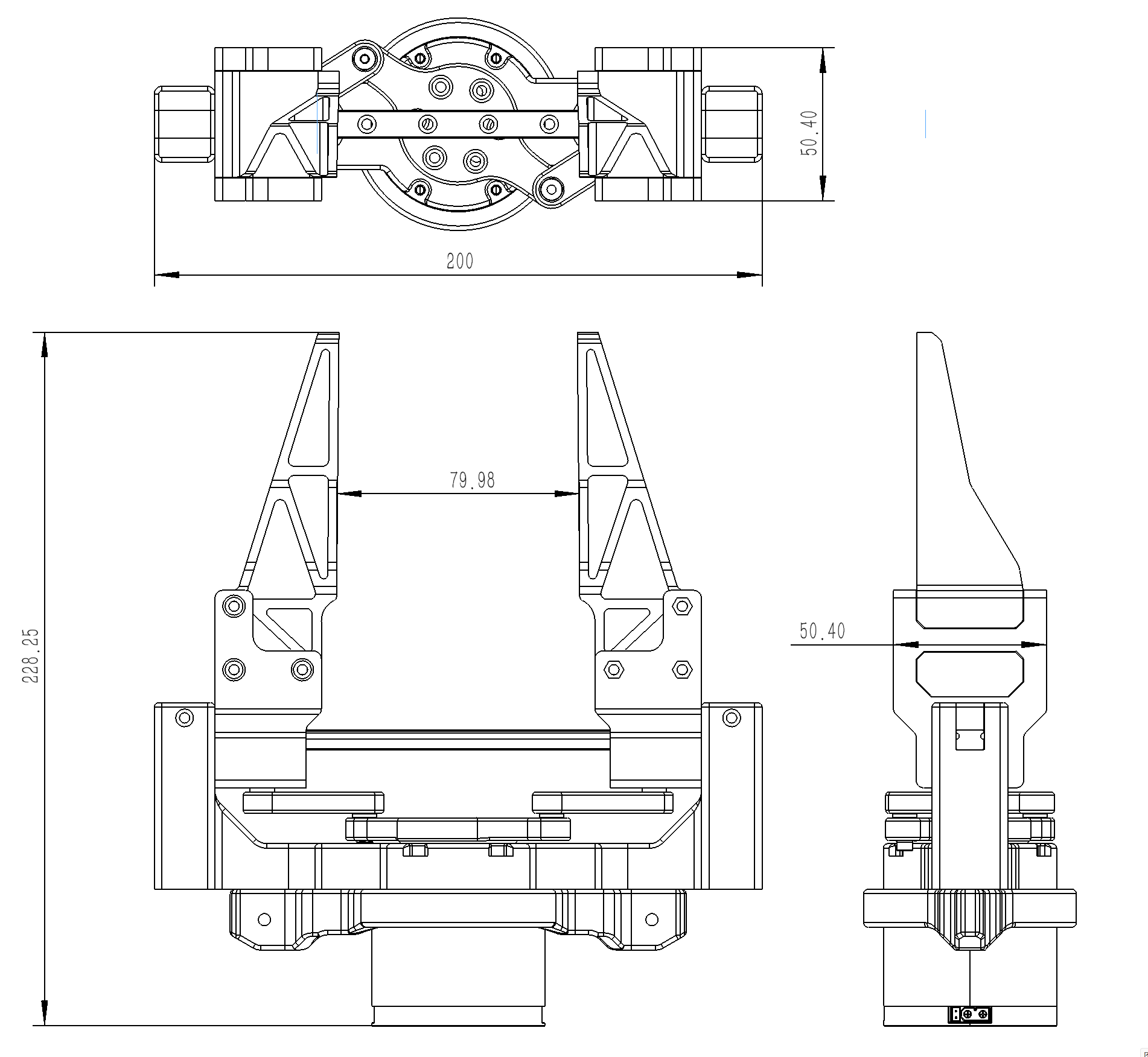
尺寸与工作范围
下图展示了夹爪的尺寸与工作范围(单位:毫米),爪体更换后高度会有所不同。
驱动机构
本夹爪采用经典的双曲柄-滑块机构,将旋转运动转化为轴向运动。
- 曲柄-滑块示意:

- 运动仿真演示:
物料清单 (BOM)
🔩 紧固件
| 名称 | 数量 |
|---|---|
| 十字盘头螺钉 PM3×8 | 8 |
| 内六角圆柱头螺钉 M3×20 | 4 |
| 内六角圆柱头螺钉 M3×25 | 6 |
| 内六角圆柱头螺钉 M3×50 | 8 |
| 内六角圆柱头螺钉 M3×16 | 12 |
| 304 尼龙自锁螺母 M3 (厚度 3.9mm × 宽度 5.5mm) | 18 |
| 弹簧垫圈 – M3 | 4 |
| 平垫圈 – M3×7mm (外径) × 0.5mm (厚度) | 8 |
⚙️ 轴承
| 名称 | 数量 |
|---|---|
| F3-8M 推力轴承 (内径 3mm × 外径 8mm × 厚度 3.5mm) | 4 |
🛠️ 直线运动
| 名称 | 数量 |
|---|---|
| 不锈钢直线导轨 MGN9, 200mm | 1 |
| 直线滑块 MGN9C (标准型) | 2 |
🔌 执行器
| 名称 | 数量 |
|---|---|
| DM4310-2EC 电机 | 1 |
🧩 定制打印件
| 名称 | 数量 |
|---|---|
| 3D 打印件 | 1 套 |
装配指南
3D 打印指南
-
如果你有独立的支撑材料,或者在
AMS
中使用 PETG+PLA 并希望在支撑面获得更好的表面质量,请参考
此维基。
注意:打印时间可能会更长。 -
如果你只有一种耗材,请确保打印方向正确,并决定是否需要以下步骤(在 Bambu Studio 中开启 ADVANCED 选项)。
warning使用 PETG 或 ABS 时请不要更改 Top Z 距离,保持默认值。仅在使用 PLA 时才需要修改。
-
步骤 1: 选择支撑最少的打印布局

-
步骤 2: 按图中绿色矩形所示开启 Scarf 设置,可获得更好的表面质量。

-
步骤 3: 我的打印参数:层高 0.2mm,填充密度 25%,填充样式 – 3D 蜂窝。




-
装配步骤演示
- 步骤 1: 使用八颗 M3×8 圆头螺钉将爪体固定在 MGN9C 滑块上
- 步骤 2: 依次堆叠轴承、转子和连杆(类似“汉堡”结构)
- 步骤 3: 在槽的上下分别放置八个 M7 垫圈
- 步骤 4: 在垫圈上下分别放置四个螺母
- 步骤 5: 拧紧四对 M3×20 螺钉和弹簧垫圈(必要时使用钳子)
- 步骤 6: 将底座与电机放置到位,转子板与电机的图案需对齐
- 步骤 7: 用六颗 M3×16 螺钉将转子板固定在电机上
- 步骤 8: 将爪体基座推至最大开合范围以便后续操作
- 步骤 9: 将相机支架安装到底部
- 步骤 10: 使用四对 M3×25 螺钉和螺母固定凸轮支架
- 步骤 11: 用六颗 M3×16 螺钉固定底座(此阶段需拉出导轨,之后再推回)
- 步骤 12: 使用两对 M3×50 螺钉和螺母将导轨锁定在底座上
- 步骤 13: 滑入压轨件并用两对 M3×25 螺钉和螺母固定
- 步骤 14: 将爪体放置在爪体支架上,并用六对 M3×50 螺钉和螺母固定
演示与 CAD 文件
- 请参考 Damiao Actuators 维基 进行前期准备。
- 请参考 力矩控制器演示(特别感谢 tianrking)来通过 GUI 控制夹爪动作。

- CAD 资源:可编辑的 STEP 文件与 STL 文件可在 此处 获取。