使用 Grove 扩展 MCP
概述
本文档描述了如何在基于 ESP32-S3 的 SenseCAP Watcher 开发板上通过 Grove 接口使用 DHT20 温湿度传感器。
硬件准备
| SenseCAP Watcher for XiaoZhi | Grove - Temperature & Humidity Sensor V2.0 (DHT20) |
|---|---|
 |  |
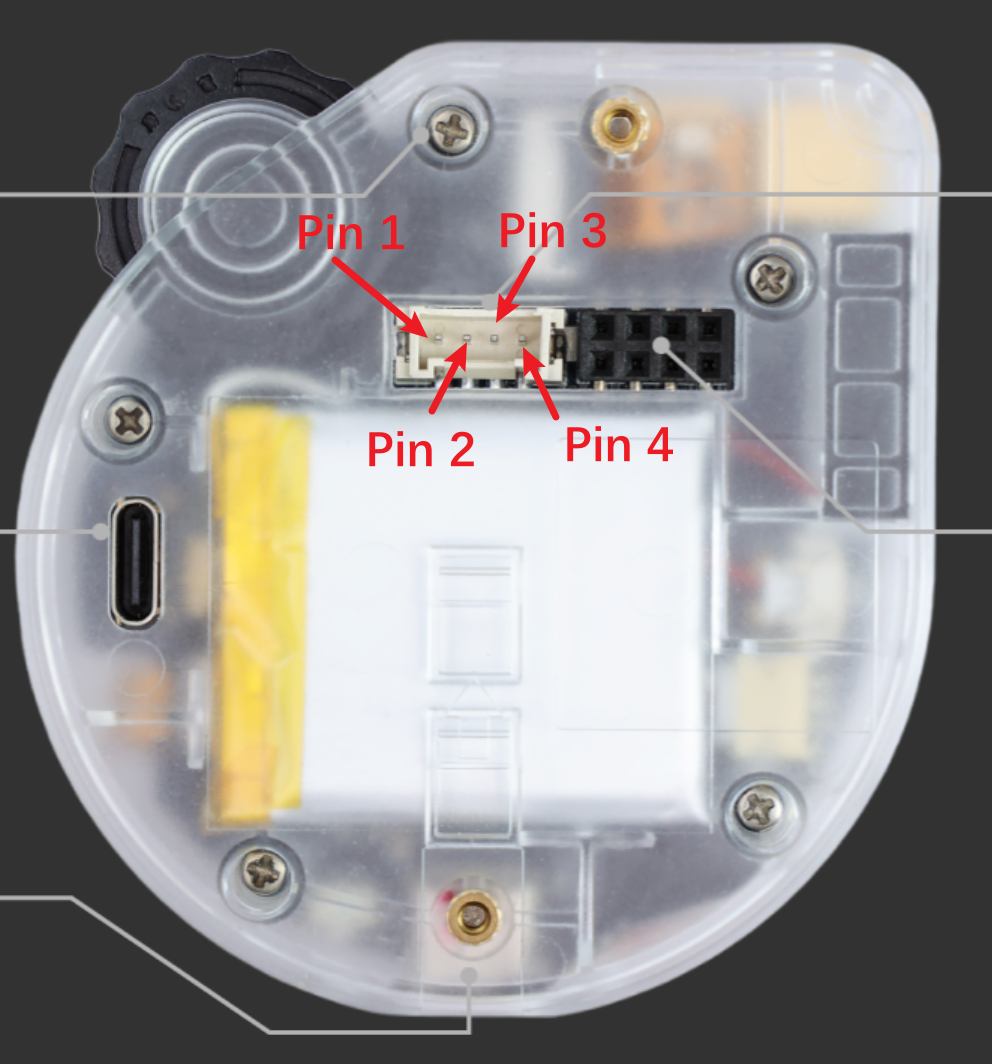
Grove 接口定义 (J5)
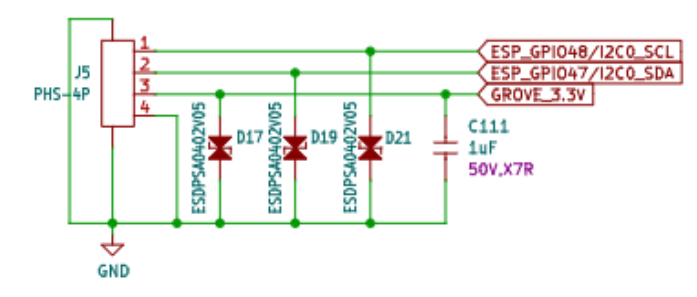
根据硬件原理图,Grove 接口使用以下引脚:
| Grove 引脚 | 功能 | ESP32-S3 连接 |
|---|---|---|
| Pin 1 | SCL | GPIO48 (I2C0_SCL) |
| Pin 2 | SDA | GPIO47 (I2C0_SDA) |
| Pin 3 | VCC | GROVE_3.3V (3.3V 电源) |
| Pin 4 | GND | GND |
DHT20 传感器
- I2C 地址:0x38(固定,无法更改)
- 供电电压:2.0V - 5.5V(使用 3.3V)
- 通信协议:I2C(最高 400kHz)
- 测量范围:
- 温度:-40°C 至 +80°C(精度:±0.5°C)
- 湿度:0% 至 100% RH(精度:±3% RH)
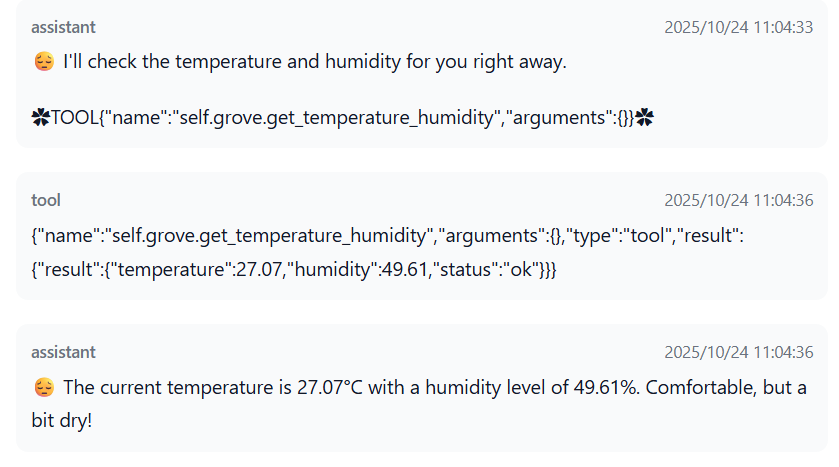
执行结果
文件结构
原始代码:
新文件:
-
您应该将上述两个文件放置在以下位置:
- 文件位置
main/boards/sensecap-watcher/
├── dht20.h # DHT20 driver header
└── dht20.cc # DHT20 driver implementation
- 文件位置
修改的文件
-
请参考核心功能(内部 MCP 工具接口)了解修改的代码部分。
-
您应该在以下位置替换上述文件:
- 文件位置
main/boards/sensecap-watcher/
└── sensecap_watcher.cc # Integrates DHT20 sensor and MCP tool
- 文件位置
注意
上述示例代码仅供参考。您应该根据您的具体传感器型号、开发环境和固件版本进行修改,以确保正确集成和成功编译。
- Grove I2C 传感器可以直接连接到 I2C 总线。
- 非 I2C 传感器可以通过可用的 GPIO 引脚连接,允许灵活集成各种传感器类型。
核心功能(DHT20 传感器)
1. 传感器初始化
DHT20 驱动程序实现了完整的初始化过程:
- 步骤 1. 重置传感器:发送 0xBA 重置命令
- 步骤 2. 系统配置:向寄存器 0xE1 写入 [0x08, 0x00]
- 步骤 3. 校准检查:检查状态寄存器位[3]以确保传感器已校准
- 步骤 4. 重试机制:如果校准失败,最多重试 5 次
esp_err_t ret = dht20_sensor_->Initialize();
if (ret == ESP_OK) {
ESP_LOGI(TAG, "DHT20 initialized successfully");
}
2. 温湿度读取
读取过程:
- 步骤 1. 触发测量:发送命令 [0xAC, 0x33, 0x00]
- 步骤 2. 等待测量:延迟 80ms
- 步骤 3. 读取 8 字节:[状态, 湿度高, 中, 低 | 温度高, 中, 低, CRC]
- 步骤 4. 数据解析:
- 湿度 = (20 位原始值) × 100 / 2^20
- 温度 = (20 位原始值) × 200 / 2^20 - 50
float temperature, humidity;
esp_err_t ret = dht20_sensor_->ReadTempAndHumidity(temperature, humidity);
if (ret == ESP_OK) {
printf("Temperature: %.2f°C, Humidity: %.2f%%\n", temperature, humidity);
}
3. I2C 通信协议
| 功能 | 命令/寄存器 | 数据 |
|---|---|---|
| 重置传感器 | 0xBA | - |
| 配置寄存器 | 0xE1 | [0x08, 0x00] |
| 触发测量 | - | [0xAC, 0x33, 0x00] |
| 读取状态 | - | 1 字节 |
| 读取数据 | - | 7 字节 |
4. 状态字节定义
| 位 | 功能 | 值 |
|---|---|---|
| bit[7] | 测量状态 | 1=测量中, 0=空闲 |
| bit[6:4] | 保留 | - |
| bit[3] | 校准状态 | 1=已校准, 0=未校准 |
| bit[2:0] | 保留 | - |
5. 数据解析算法
// Humidity data (20 bits)
uint32_t humidity_raw = (data[1] << 12) | (data[2] << 4) | (data[3] >> 4);
float humidity = humidity_raw * 100.0f / 1048576.0f;
// Temperature data (20 bits)
uint32_t temperature_raw = ((data[3] & 0x0F) << 16) | (data[4] << 8) | data[5];
float temperature = temperature_raw * 200.0f / 1048576.0f - 50.0f;
核心功能(内部 MCP 工具接口)
1. 功能描述
- 工具名称:
self.grove.get_temperature_humidity - 工具应用:从 Grove 连接的 DHT20 传感器读取当前温度和湿度
2. 调用示例
AI 可以如下调用:
result = call_tool("self.grove.get_temperature_humidity", {})
3. 返回格式
-
成功:
{
"temperature": 25.32,
"humidity": 65.47,
"status": "ok"
} -
失败:
{
"error": "DHT20 sensor not initialized"
}或
{
"error": "Failed to read DHT20: ESP_ERR_TIMEOUT"
}
4. 修改的代码部分和说明
添加头文件包含
-
在
sensecap_watcher.cc的开头添加以下包含语句:#include "dht20.h"
#include "mcp_server.h" -
目的
-
dht20.h — 引入 DHT20 传感器的驱动程序 API,实现温湿度读取。
-
mcp_server.h — 提供与内部 MCP 服务器相关的 API,允许通信和注册 MCP 工具。
-
添加成员变量
-
在
SensecapWatcher类中添加以下成员变量:DHT20* dht20_sensor_ = nullptr; -
目的
dht20_sensor_— 指向通过 Grove 接口连接的 DHT20 传感器对象的指针。
它用于在SensecapWatcher实例的整个生命周期中初始化、存储和访问温湿度传感器。- 它在
InitializeDHT20()中分配,并由 MCP 工具用于读取传感器数据。 - 初始化为
nullptr以表示传感器尚未设置,在读取前执行空值检查。
添加 DHT20 初始化和 MCP 工具
-
在
SensecapWatcher类中添加以下成员函数:void InitializeDHT20() {
ESP_LOGI(TAG, "Initialize DHT20 sensor on Grove port");
// Create DHT20 sensor instance
dht20_sensor_ = new DHT20(i2c_bus_);
// Initialize and calibrate the sensor
esp_err_t ret = dht20_sensor_->Initialize();
if (ret != ESP_OK) {
ESP_LOGE(TAG, "DHT20 initialization failed: %s", esp_err_to_name(ret));
delete dht20_sensor_;
dht20_sensor_ = nullptr;
return;
}
ESP_LOGI(TAG, "DHT20 sensor initialized successfully");
// Register MCP tool for reading temperature and humidity
auto& mcp_server = McpServer::GetInstance();
mcp_server.AddTool("self.grove.get_temperature_humidity",
"Read temperature and humidity from the Grove-connected DHT20 sensor.\n"
"Return format: {\"temperature\": value(°C), \"humidity\": value(%), \"status\": \"ok\"}\n"
"If reading fails, returns an error message.",
PropertyList(),
[this](const PropertyList&) -> ReturnValue {
if (!dht20_sensor_) {
return "{\"error\": \"DHT20 sensor not initialized\"}";
}
float temperature = 0.0f;
float humidity = 0.0f;
esp_err_t ret = dht20_sensor_->ReadTempAndHumidity(temperature, humidity);
if (ret != ESP_OK) {
std::string error_msg = "{\"error\": \"Failed to read DHT20: ";
error_msg += esp_err_to_name(ret);
error_msg += "\"}";
return error_msg;
}
// Format response as JSON
char buffer[128];
snprintf(buffer, sizeof(buffer),
"{\"temperature\": %.2f, \"humidity\": %.2f, \"status\": \"ok\"}",
temperature, humidity);
return std::string(buffer);
});
ESP_LOGI(TAG, "DHT20 MCP tool registered: self.grove.get_temperature_humidity");
} -
在构造函数中添加 DHT20 初始化调用
SensecapWatcher() {
...
InitializeCamera();
InitializeDHT20(); // Initialize Grove DHT20 sensor
} -
目的
InitializeDHT20()— 在 Grove 接口上初始化 DHT20 传感器,并注册一个 MCP 工具以允许内部访问温湿度数据。- 该函数创建
DHT20实例,对其进行校准,并检查初始化错误。 - 如果初始化成功,它会注册 MCP 工具
self.grove.get_temperature_humidity用于通过 JSON 读取传感器数据。 - 在
SensecapWatcher的构造函数中调用,以确保传感器在板子启动时就绪:
故障排除
常见问题
- 传感器初始化失败
- 可能原因:
- Grove 接口供电不正确
- I2C 连接问题
- 传感器未连接或损坏
- 解决方案
uint32_t grove_power = esp_io_expander_get_level(io_exp_handle, BSP_PWR_GROVE);
ESP_LOGI(TAG, "Grove power status: %d", grove_power);
- 读取超时
- 可能原因:
- 传感器忙碌
- I2C 总线冲突
- 解决方案
- 确保读取间隔 ≥1s
- 检查 I2C 上的其他设备
- 无效数据
- 可能原因:
- 传感器未校准
- CRC 校验失败(当前版本未实现)
- 解决方案:
- 重新初始化传感器
- 考虑实现 CRC 校验(data[6])
参考资料
维护
代码位于 main/boards/sensecap-watcher/,不影响其他板子。