为 LeRobot SO-101 机械臂微调 GR00T N1.5 并在 Jetson AGX Thor 上部署
介绍
本 wiki 解释了如何为 LeRobot SO-101 机械臂微调 NVIDIA Isaac GR00T N1.5 并在 NVIDIA Jetson Thor 上部署。内容包括:
- LeRobot SO-101 和 Jetson AGX Thor 的硬件准备
- 在 Jetson Thor 上为 GR00T N1.5 设置软件环境
- 使用 LeRobot 训练平台:数据收集、数据集格式化和 SO-101 机械臂的微调
- 在 Jetson Thor 上部署训练好的 GR00T N1.5 策略(LeRobot + SO-101)的示例工作流程
- 故障排除技巧和常见陷阱

提供详细的分步说明和参考文档,帮助您从初始设置到完整部署。
NVIDIA Jetson Thor 开发者套件入门
Jetson Thor 概述
NVIDIA® Jetson AGX Thor™ 开发者套件是物理 AI 和人形机器人的强大平台。它基于 NVIDIA Blackwell GPU 构建,包含 128 GB 高速内存,在 40-130 W(常用功耗高达 130 W)功耗范围内提供高达 2,070 FP4 TFLOPS 的 AI 计算能力。
您可以从 Seeed Studio 获取 Jetson AGX Thor 开发者套件:Seeed – NVIDIA Jetson AGX Thor™ 开发者套件

包装盒中包含的硬件物品是一个 Thor 单元和一个电源适配器:
刷写 Thor 系统镜像
截至 2025 年 9 月 10 日,Thor 的最新可用系统镜像版本是 38.2。如果您需要为 Thor 重新刷写系统,请按照本节中的说明操作。 刷写所需物品:
- 一台具有超过 25 GB 可用磁盘空间的主机设备(支持 Ubuntu 或 Windows 操作系统)
- 一个容量至少为 16 GB 的 USB 驱动器
- 一台显示器和 DP/HDMI 显示线缆
- 一个能够提供超过 240 W 功率的电源供应环境
- 一个带 USB 接口的键盘
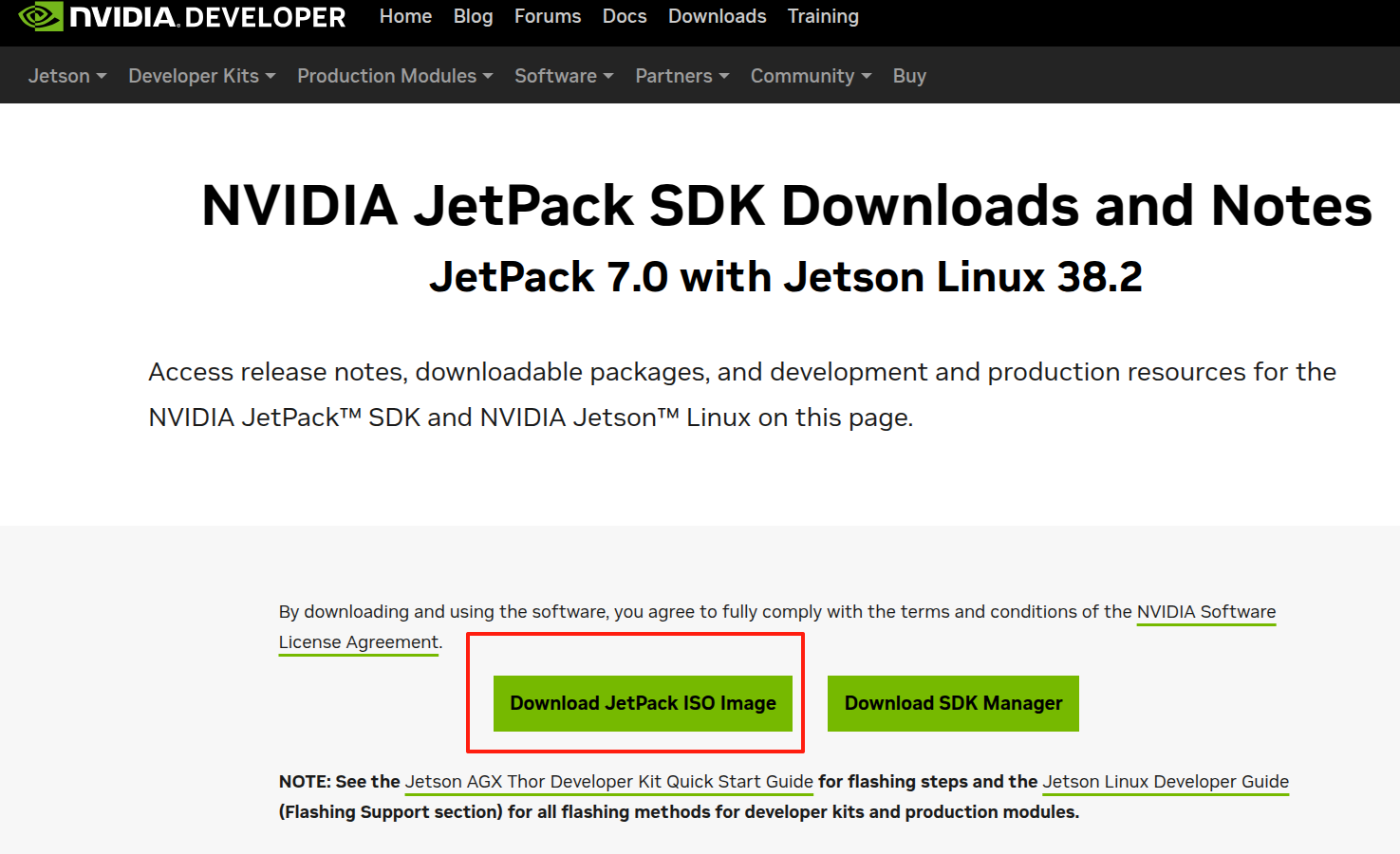
首先,从 NVIDIA 官方网站下载 Thor 的 ISO 格式系统镜像。点击这里访问下载页面:
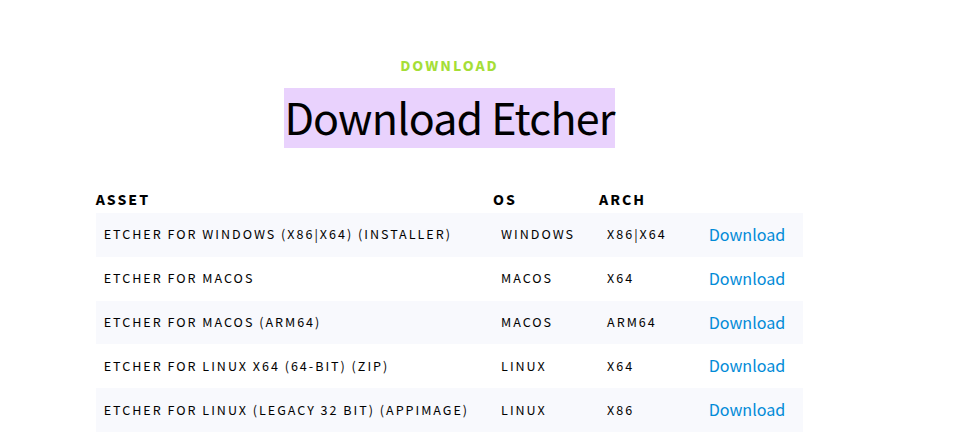
在主机上安装 Balena Etcher。要下载安装程序,点击这里并根据您的主机操作系统选择合适的版本:
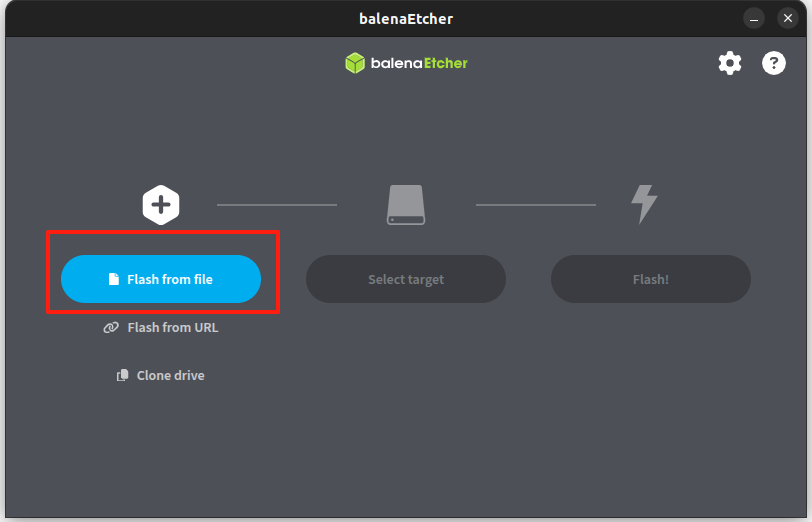
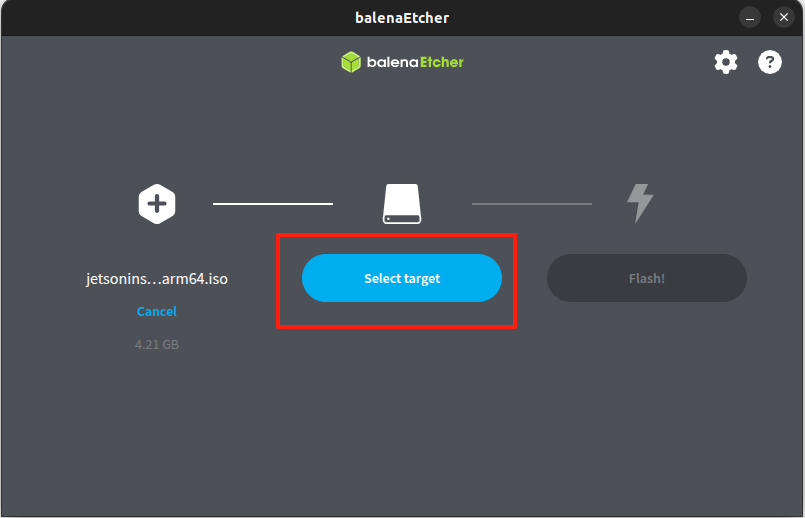
下载 ISO 镜像文件并成功安装 Balena Etcher 后,将 USB 驱动器插入主机。然后,启动 Balena Etcher 创建用于刷写 Thor 的可启动 USB 驱动器:
此过程将格式化 USB 驱动器。请确保事先备份任何重要数据。
从本地存储中选择下载的 ISO 镜像文件,然后选择目标设备——即您的 USB 驱动器。
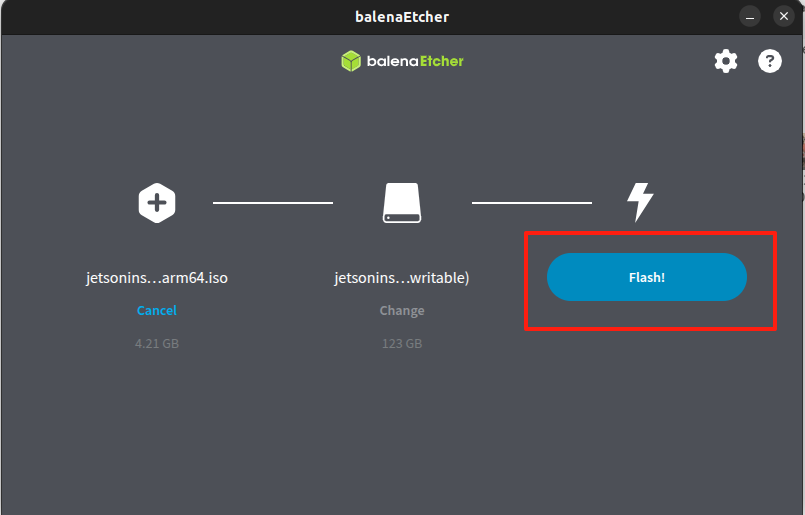
请务必仔细验证目标设备名称和挂载目录!点击 Flash! 并等待过程完成。完成后,用于将系统刷写到 Thor 的 USB 驱动器就准备好了:
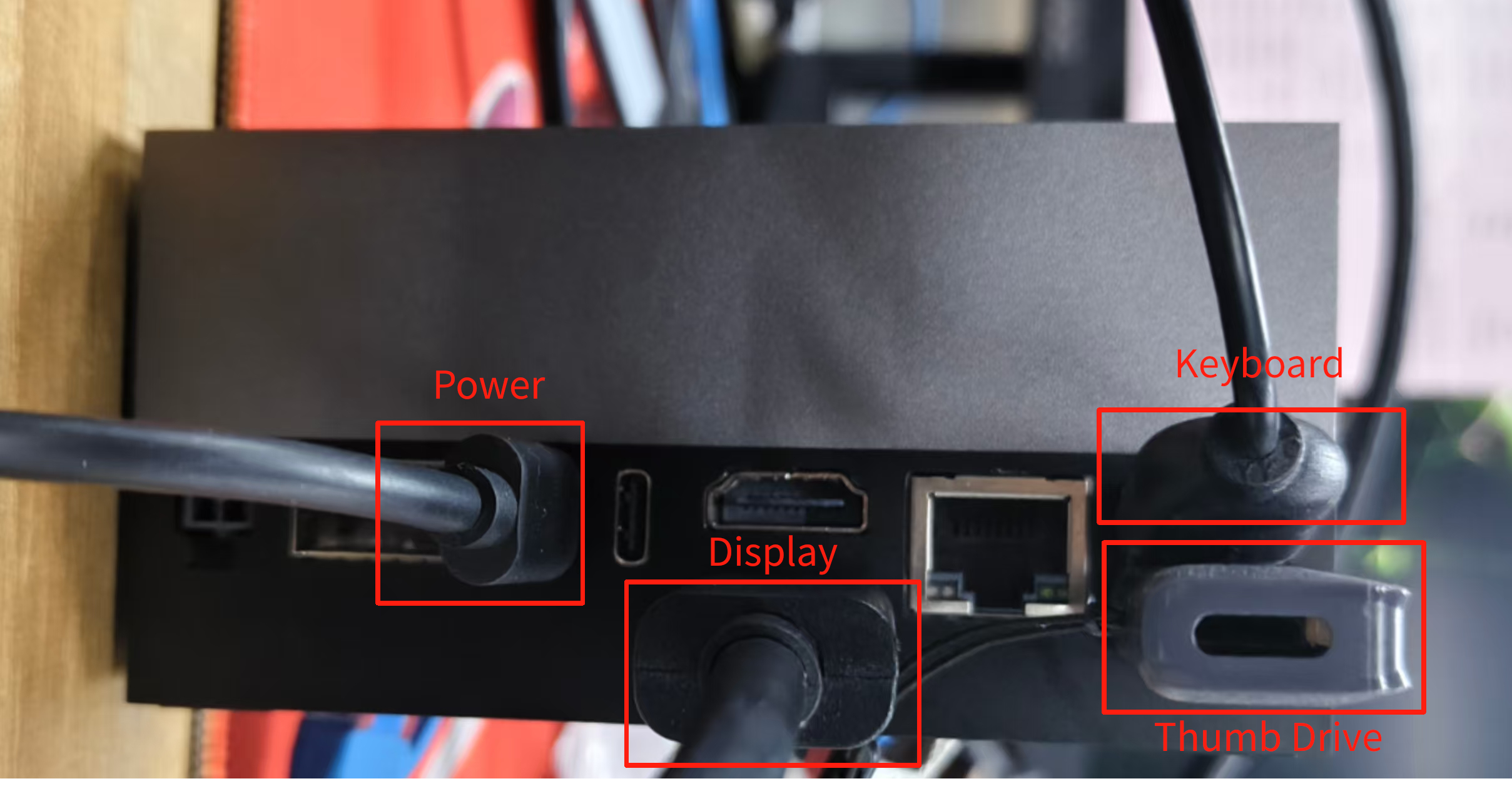
接下来,将准备好的 USB 驱动器、键盘、显示线缆(DP/HDMI)和电源(Type-C)插入 Thor 板以开始刷写过程。
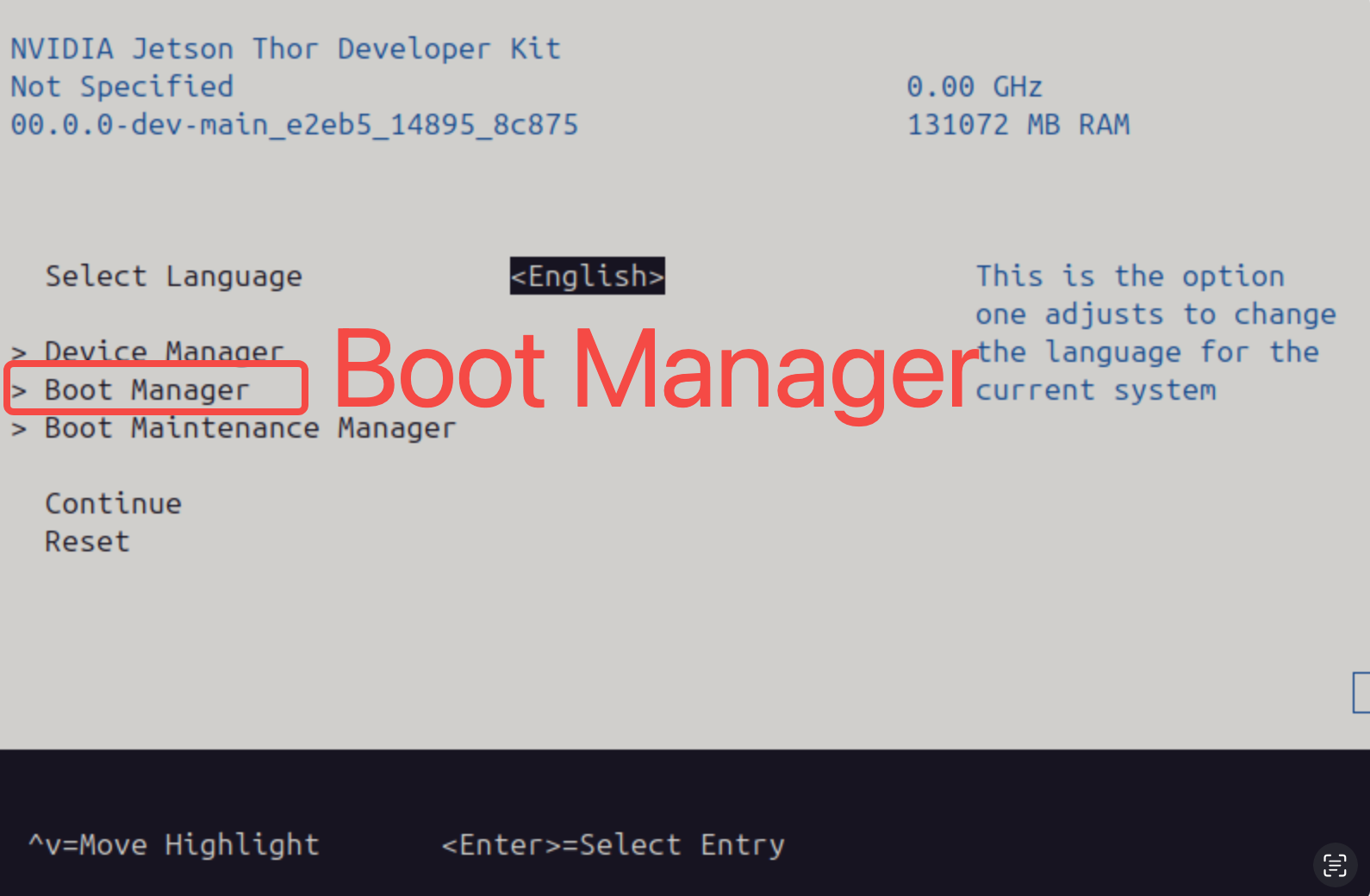
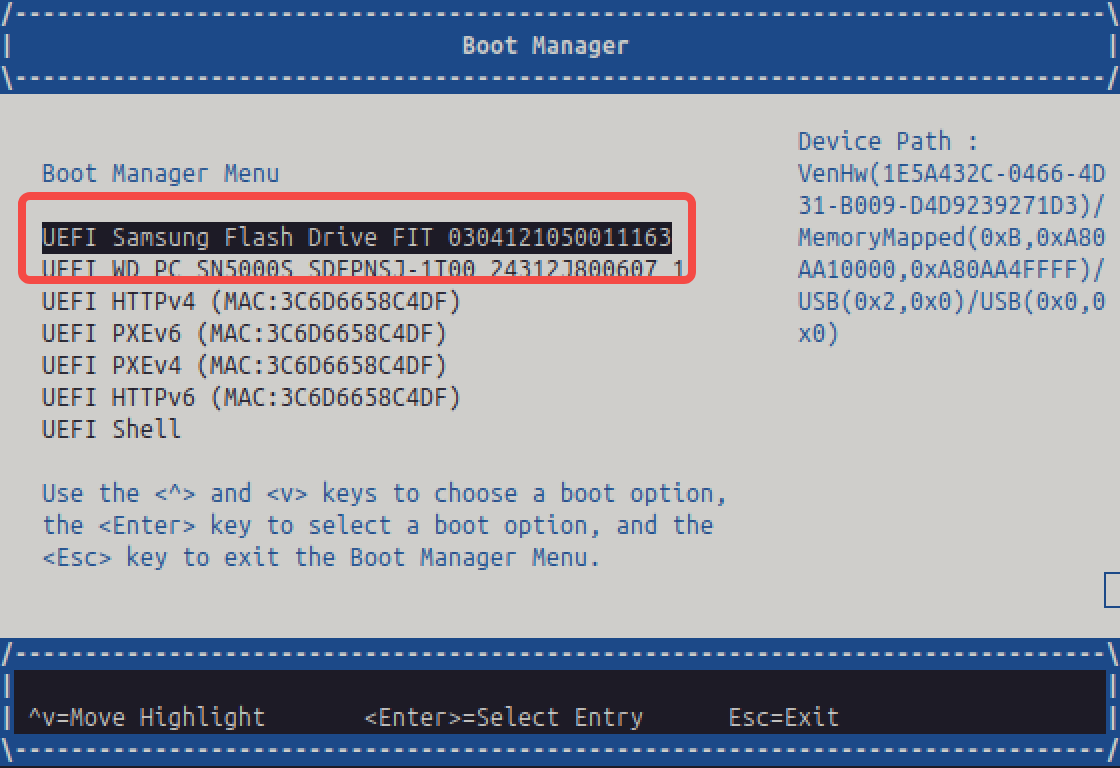
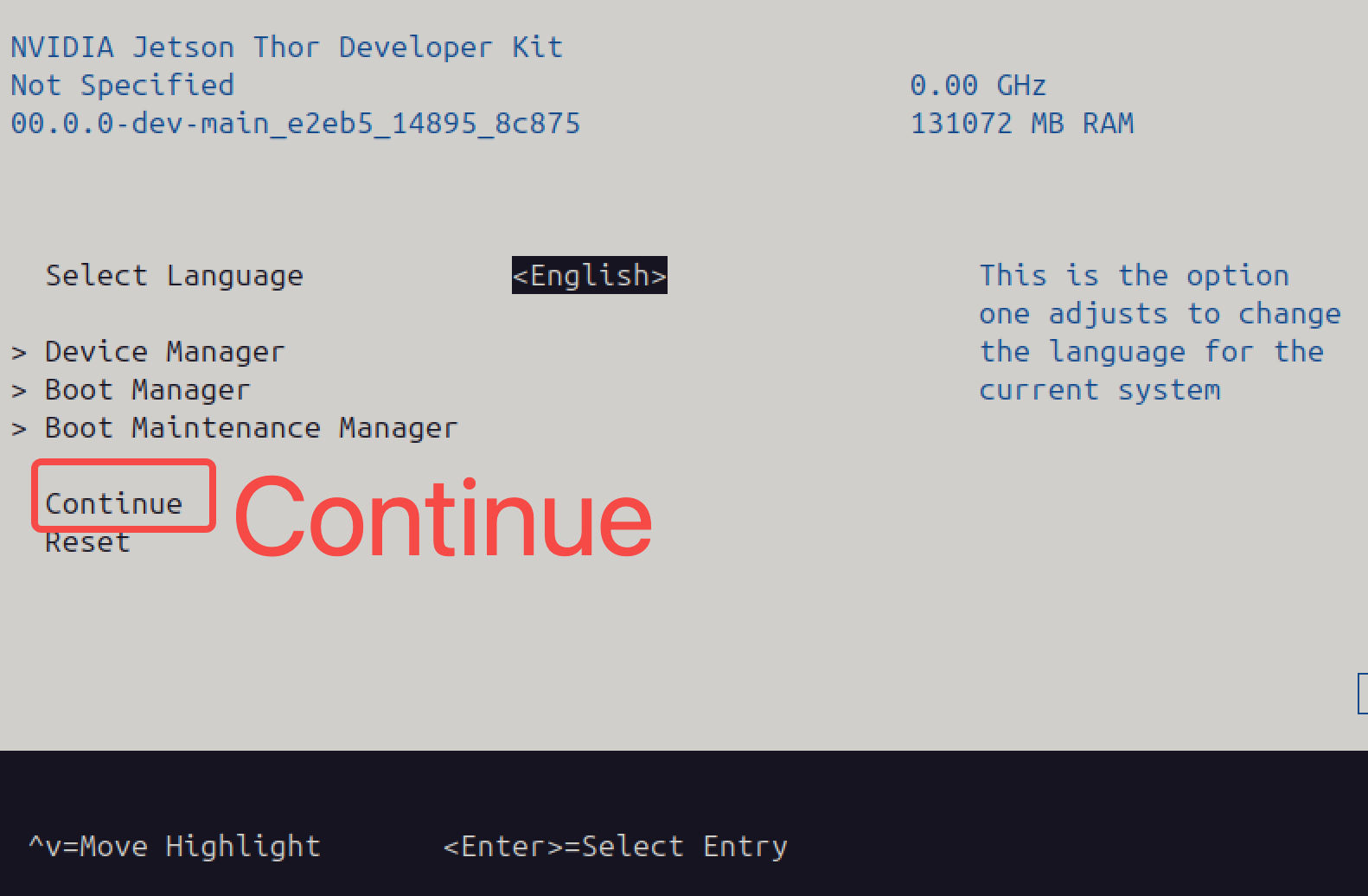
打开 Thor 电源并进入启动界面。选择 Boot Manager,然后选择插入 Thor 的 USB 驱动器(根据您的 USB 驱动器名称)。按 Esc 返回上一个菜单,然后选择 Continue:
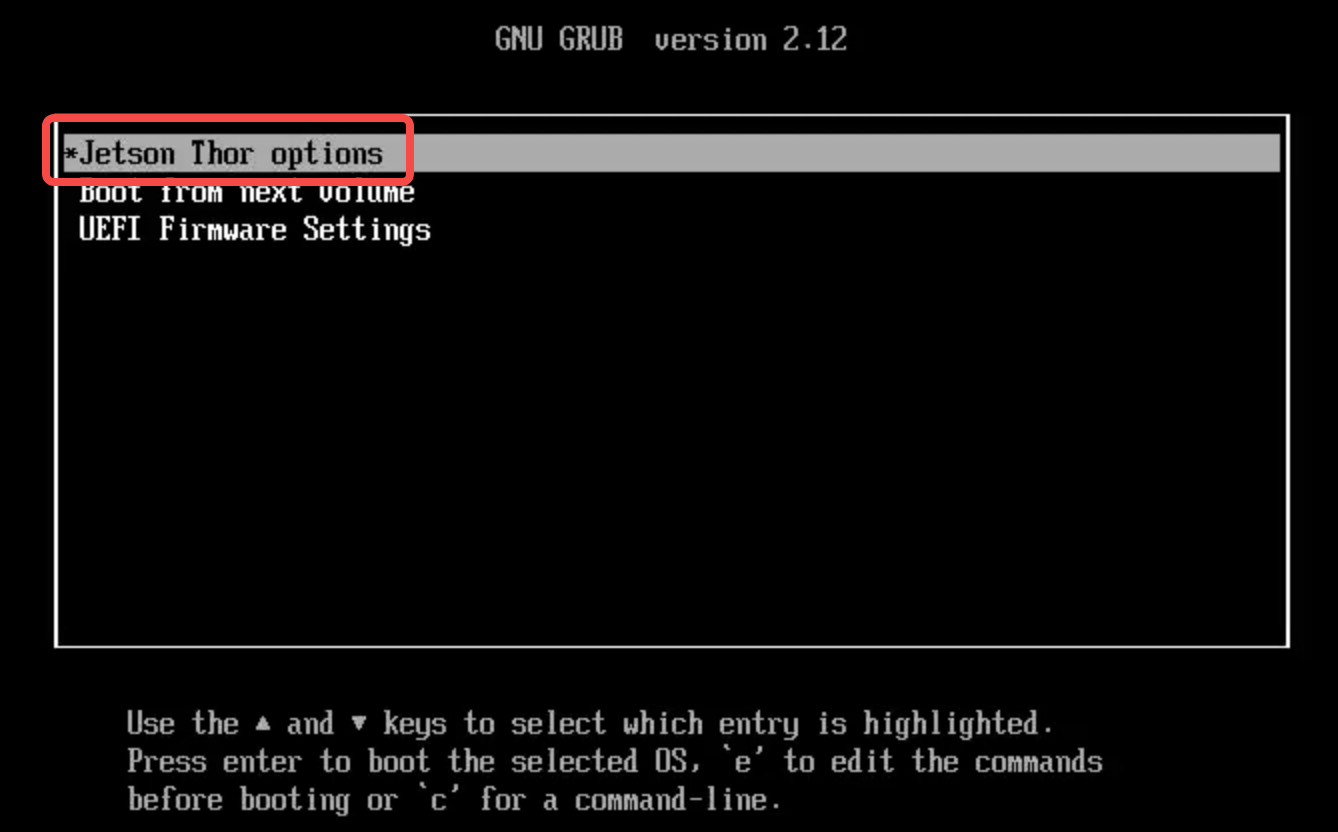
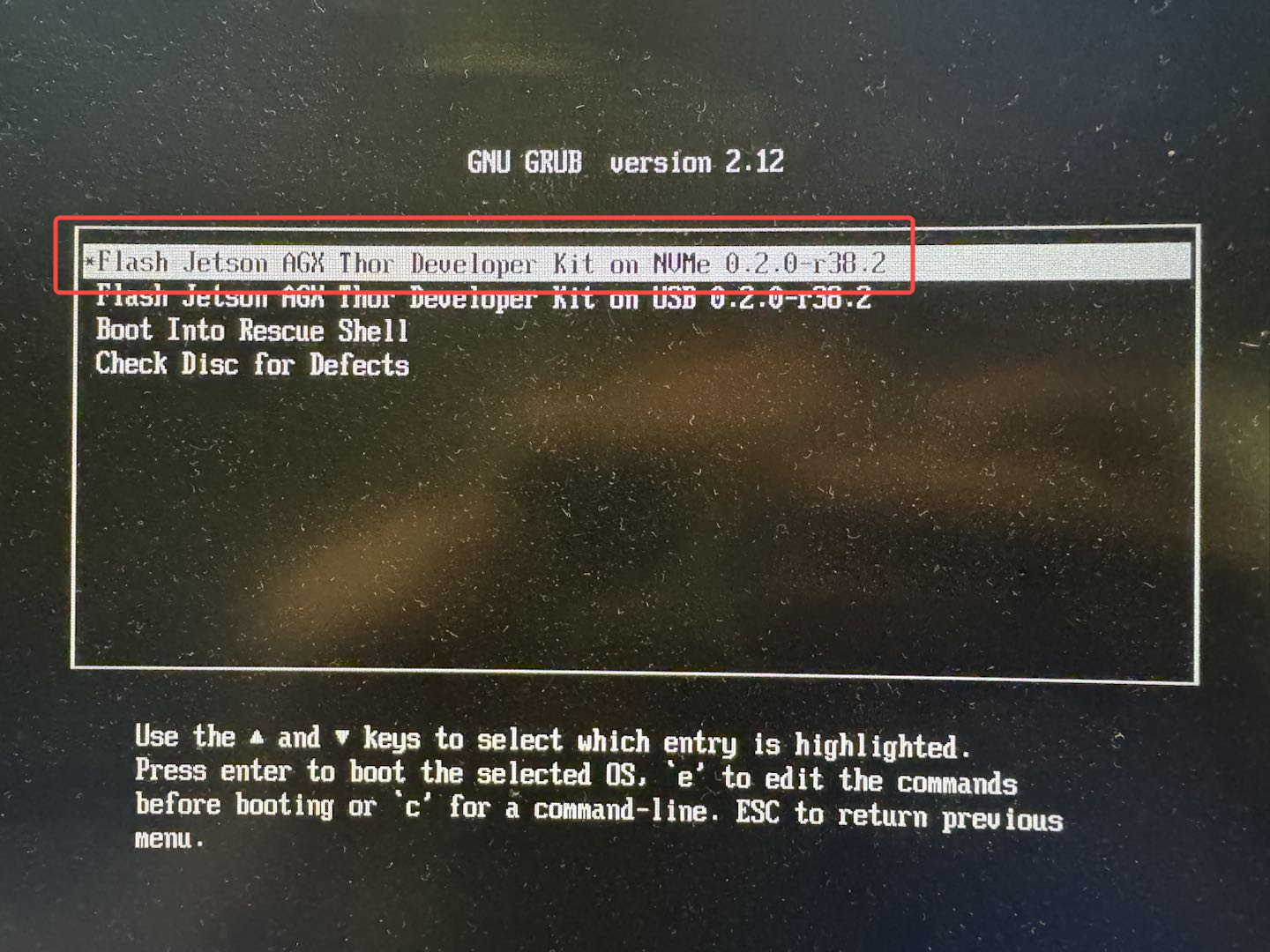
经过短暂的黑屏后,将出现以下界面。选择 Jetson Thor options 并按 Enter。然后,选择选项
Flash Jetson AGX Thor Developer Kit on NVMe 0.2.0-r38.2 将系统镜像刷写到 Thor 的 NVMe 固态硬盘:
屏幕上将显示大量日志信息。等待大约 15 分钟。此阶段完成后,设备将自动重启并进入下一个界面。等待 Update Progress 进度条达到 100%,这表示刷写过程已成功完成:
刷写完成后,您可以继续进行初始系统配置:
此系统镜像不包含 CUDA、TensorRT 或 JetPack 的其他 SDK 组件。
Thor 上的基本开发环境设置
本节提供了如何在 Thor 上安装常用软件依赖项以用于开发目的的示例。这些依赖项旨在促进后续开发。
请注意,列出的依赖项仅供参考——请根据各自项目的要求安装其他软件包。
安装基本开发依赖项
JetPack SDK 安装
打开终端并运行以下命令。稍等片刻后,CUDA、TensorRT 和其他 SDK 组件将被安装:
sudo apt update
sudo apt install nvidia-jetpack
浏览器安装
Firefox 已经过测试并验证可在 Ubuntu 24.04 上稳定运行:
sudo apt update
sudo apt install firefox
Jtop 安装
要安装 jtop,请参考以下说明。
sudo apt update
sudo apt install python3
sudo apt install python3-pip
sudo pip3 install -U pip
sudo pip3 install jetson-stats
Miniconda 安装
Miniconda 用于隔离开发环境。要安装 miniconda,请参考以下说明:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
conda --version
安装 GPU 版本的 PyTorch
在 Thor 上从源代码编译 GPU 版本的 PyTorch 可能会导致兼容性问题。为了方便起见,我们提供了一个预编译的 .whl 文件,帮助开发者在 Thor 上快速设置支持 PyTorch 的开发环境。
这里提供了一个预编译的 wheel 文件,用于在 Thor 上安装 PyTorch 2.9。此文件是在 Python 3.10 + CUDA 13 环境中编译的。
点击 Python 3.10 + CUDA 13 pytorch2.9 下载 .whl 文件。
点击 Python 3.10 + CUDA 13 torchvision0.24 下载 .whl 文件。
点击 Python 3.10 + CUDA 13 torchvision0.23 下载 .whl 文件。
其他 Python 3.12 + CUDA 13 为 thor 预编译的依赖项 .whl 文件可以在这里找到:
https://pypi.jetson-ai-lab.io/sbsa/cu130。
如果没有预期的 wheel 文件,开发者需要自己构建所需的依赖项来完成开发环境的设置。
安装其他依赖项
本文档提供了一个参考 Docker 镜像,帮助开发者快速适应 Jetson AGX Thor 开发环境。 此镜像仅供参考,开发者可以根据具体需求自由选择是否使用。
由于镜像大小超过 40 GB,从服务器下载相对较慢。
此 Docker 镜像可以稳定运行 GR00T N1.5 推理。镜像中 pip list 命令的输出如下:
pip.list
Package Version Location Installer Editable project location
------------------------- ----------------- ---------------- -------------------------------------- -------------------------
absl-py 2.3.1 /opt/venv/lib/python3.12/site-packages pip
accelerate 1.2.1 /opt/venv/lib/python3.12/site-packages pip
aiohappyeyeballs 2.6.1 /opt/venv/lib/python3.12/site-packages pip
aiohttp 3.12.15 /opt/venv/lib/python3.12/site-packages pip
aiosignal 1.4.0 /opt/venv/lib/python3.12/site-packages pip
albucore 0.0.17 /opt/venv/lib/python3.12/site-packages pip
albumentations 1.4.18 /opt/venv/lib/python3.12/site-packages pip
annotated-types 0.7.0 /opt/venv/lib/python3.12/site-packages pip
antlr4-python3-runtime 4.9.3 /opt/venv/lib/python3.12/site-packages pip
anyio 4.10.0 /opt/venv/lib/python3.12/site-packages pip
argon2-cffi 25.1.0 /opt/venv/lib/python3.12/site-packages pip
argon2-cffi-bindings 25.1.0 /opt/venv/lib/python3.12/site-packages pip
arrow 1.3.0 /opt/venv/lib/python3.12/site-packages pip
asttokens 3.0.0 /opt/venv/lib/python3.12/site-packages pip
astunparse 1.6.3 /opt/venv/lib/python3.12/site-packages pip
async-lru 2.0.5 /opt/venv/lib/python3.12/site-packages pip
attrs 23.2.0 /usr/lib/python3/dist-packages debian
av 12.3.0 /opt/venv/lib/python3.12/site-packages pip
babel 2.17.0 /opt/venv/lib/python3.12/site-packages pip
beautifulsoup4 4.13.5 /opt/venv/lib/python3.12/site-packages pip
bleach 6.2.0 /opt/venv/lib/python3.12/site-packages pip
blessings 1.7 /opt/venv/lib/python3.12/site-packages pip
blinker 1.9.0 /opt/venv/lib/python3.12/site-packages pip
certifi 2025.8.3 /opt/venv/lib/python3.12/site-packages pip
cffi 2.0.0 /opt/venv/lib/python3.12/site-packages pip
charset-normalizer 3.4.3 /opt/venv/lib/python3.12/site-packages pip
click 8.2.1 /opt/venv/lib/python3.12/site-packages pip
cloudpickle 3.1.1 /opt/venv/lib/python3.12/site-packages pip
cmake 3.31.6 /opt/venv/lib/python3.12/site-packages pip
comm 0.2.3 /opt/venv/lib/python3.12/site-packages pip
contourpy 1.3.3 /opt/venv/lib/python3.12/site-packages pip
cramjam 2.11.0 /opt/venv/lib/python3.12/site-packages pip
cryptography 41.0.7 /usr/lib/python3/dist-packages debian
cuda-bindings 13.0.0 /opt/venv/lib/python3.12/site-packages pip
cuda-core 0.3.2 /opt/venv/lib/python3.12/site-packages pip
cuda-pathfinder 1.2.2 /opt/venv/lib/python3.12/site-packages pip
cycler 0.12.1 /opt/venv/lib/python3.12/site-packages pip
Cython 3.1.3 /opt/venv/lib/python3.12/site-packages pip
datasets 4.0.0 /opt/venv/lib/python3.12/site-packages pip
dbus-python 1.3.2 /usr/lib/python3/dist-packages
debugpy 1.8.16 /opt/venv/lib/python3.12/site-packages pip
decorator 5.2.1 /opt/venv/lib/python3.12/site-packages pip
decord 0.6.0 /opt/venv/lib/python3.12/site-packages pip
deepdiff 8.6.1 /opt/venv/lib/python3.12/site-packages pip
defusedxml 0.7.1 /opt/venv/lib/python3.12/site-packages pip
devscripts 2.23.7 /usr/lib/python3/dist-packages
diffusers 0.36.0.dev0 /opt/venv/lib/python3.12/site-packages pip
dill 0.3.8 /opt/venv/lib/python3.12/site-packages pip
distro 1.9.0 /usr/lib/python3/dist-packages debian
dm-tree 0.1.8 /opt/venv/lib/python3.12/site-packages pip
docker-pycreds 0.4.0 /opt/venv/lib/python3.12/site-packages pip
docstring_parser 0.17.0 /opt/venv/lib/python3.12/site-packages pip
docutils 0.22 /opt/venv/lib/python3.12/site-packages pip
draccus 0.11.5 /opt/venv/lib/python3.12/site-packages pip
einops 0.8.1 /opt/venv/lib/python3.12/site-packages pip
eval_type_backport 0.2.2 /opt/venv/lib/python3.12/site-packages pip
evdev 1.9.2 /opt/venv/lib/python3.12/site-packages pip
executing 2.2.1 /opt/venv/lib/python3.12/site-packages pip
Farama-Notifications 0.0.4 /opt/venv/lib/python3.12/site-packages pip
fastjsonschema 2.21.2 /opt/venv/lib/python3.12/site-packages pip
fastparquet 2024.11.0 /opt/venv/lib/python3.12/site-packages pip
feetech-servo-sdk 1.0.0 /opt/venv/lib/python3.12/site-packages pip
filelock 3.19.1 /opt/venv/lib/python3.12/site-packages pip
flash_attn 2.8.4 /opt/venv/lib/python3.12/site-packages pip
Flask 3.1.2 /opt/venv/lib/python3.12/site-packages pip
flatbuffers 25.2.10 /opt/venv/lib/python3.12/site-packages pip
fonttools 4.59.2 /opt/venv/lib/python3.12/site-packages pip
fqdn 1.5.1 /opt/venv/lib/python3.12/site-packages pip
frozenlist 1.7.0 /opt/venv/lib/python3.12/site-packages pip
fsspec 2025.3.0 /opt/venv/lib/python3.12/site-packages pip
gast 0.6.0 /opt/venv/lib/python3.12/site-packages pip
gitdb 4.0.12 /opt/venv/lib/python3.12/site-packages pip
GitPython 3.1.45 /opt/venv/lib/python3.12/site-packages pip
google-pasta 0.2.0 /opt/venv/lib/python3.12/site-packages pip
grpcio 1.74.0 /opt/venv/lib/python3.12/site-packages pip
gymnasium 1.0.0 /opt/venv/lib/python3.12/site-packages pip
h11 0.16.0 /opt/venv/lib/python3.12/site-packages pip
h5py 3.12.1 /opt/venv/lib/python3.12/site-packages pip
hf-xet 1.1.9 /opt/venv/lib/python3.12/site-packages pip
httpcore 1.0.9 /opt/venv/lib/python3.12/site-packages pip
httplib2 0.20.4 /usr/lib/python3/dist-packages
httpx 0.28.1 /opt/venv/lib/python3.12/site-packages pip
huggingface-hub 0.34.4 /opt/venv/lib/python3.12/site-packages pip
hydra-core 1.3.2 /opt/venv/lib/python3.12/site-packages pip
id 1.5.0 /opt/venv/lib/python3.12/site-packages pip
idna 3.10 /opt/venv/lib/python3.12/site-packages pip
imageio 2.34.2 /opt/venv/lib/python3.12/site-packages pip
importlib_metadata 8.7.0 /opt/venv/lib/python3.12/site-packages pip
iniconfig 2.1.0 /opt/venv/lib/python3.12/site-packages pip
inquirerpy 0.3.4 /opt/venv/lib/python3.12/site-packages pip
iopath 0.1.9 /opt/venv/lib/python3.12/site-packages pip
ipykernel 6.30.1 /opt/venv/lib/python3.12/site-packages pip
ipython 9.5.0 /opt/venv/lib/python3.12/site-packages pip
ipython_pygments_lexers 1.1.1 /opt/venv/lib/python3.12/site-packages pip
ipywidgets 8.1.7 /opt/venv/lib/python3.12/site-packages pip
isoduration 20.11.0 /opt/venv/lib/python3.12/site-packages pip
itsdangerous 2.2.0 /opt/venv/lib/python3.12/site-packages pip
jaraco.classes 3.4.0 /opt/venv/lib/python3.12/site-packages pip
jaraco.context 6.0.1 /opt/venv/lib/python3.12/site-packages pip
jaraco.functools 4.3.0 /opt/venv/lib/python3.12/site-packages pip
jedi 0.19.2 /opt/venv/lib/python3.12/site-packages pip
jeepney 0.9.0 /opt/venv/lib/python3.12/site-packages pip
Jinja2 3.1.6 /opt/venv/lib/python3.12/site-packages pip
json5 0.12.1 /opt/venv/lib/python3.12/site-packages pip
jsonlines 4.0.0 /opt/venv/lib/python3.12/site-packages pip
jsonpointer 3.0.0 /opt/venv/lib/python3.12/site-packages pip
jsonschema 4.25.1 /opt/venv/lib/python3.12/site-packages pip
jsonschema-specifications 2025.9.1 /opt/venv/lib/python3.12/site-packages pip
jupyter 1.1.1 /opt/venv/lib/python3.12/site-packages pip
jupyter_client 8.6.3 /opt/venv/lib/python3.12/site-packages pip
jupyter-console 6.6.3 /opt/venv/lib/python3.12/site-packages pip
jupyter_core 5.8.1 /opt/venv/lib/python3.12/site-packages pip
jupyter-events 0.12.0 /opt/venv/lib/python3.12/site-packages pip
jupyter-lsp 2.3.0 /opt/venv/lib/python3.12/site-packages pip
jupyter_server 2.17.0 /opt/venv/lib/python3.12/site-packages pip
jupyter_server_terminals 0.5.3 /opt/venv/lib/python3.12/site-packages pip
jupyterlab 4.4.7 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_myst 2.4.2 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_pygments 0.3.0 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_server 2.27.3 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_widgets 3.0.15 /opt/venv/lib/python3.12/site-packages pip
keras 3.11.3 /opt/venv/lib/python3.12/site-packages pip
keyring 25.6.0 /opt/venv/lib/python3.12/site-packages pip
kiwisolver 1.4.9 /opt/venv/lib/python3.12/site-packages pip
kornia 0.7.4 /opt/venv/lib/python3.12/site-packages pip
kornia_rs 0.1.9 /opt/venv/lib/python3.12/site-packages pip
lark 1.2.2 /opt/venv/lib/python3.12/site-packages pip
launchpadlib 1.11.0 /usr/lib/python3/dist-packages
lazr.restfulclient 0.14.6 /usr/lib/python3/dist-packages
lazr.uri 1.0.6 /usr/lib/python3/dist-packages
lazy_loader 0.4 /opt/venv/lib/python3.12/site-packages pip
lerobot 0.3.4 /opt/lerobot /opt/venv/lib/python3.12/site-packages pip
libclang 18.1.1 /opt/venv/lib/python3.12/site-packages pip
llvmlite 0.44.0 /opt/venv/lib/python3.12/site-packages pip
lockfile 0.12.2 /opt/venv/lib/python3.12/site-packages pip
Mako 1.3.10 /opt/venv/lib/python3.12/site-packages pip
Markdown 3.9 /opt/venv/lib/python3.12/site-packages pip
markdown-it-py 4.0.0 /opt/venv/lib/python3.12/site-packages pip
MarkupSafe 3.0.2 /opt/venv/lib/python3.12/site-packages pip
matplotlib 3.10.0 /opt/venv/lib/python3.12/site-packages pip
matplotlib-inline 0.1.7 /opt/venv/lib/python3.12/site-packages pip
mdurl 0.1.2 /opt/venv/lib/python3.12/site-packages pip
mergedeep 1.3.4 /opt/venv/lib/python3.12/site-packages pip
mistune 3.1.4 /opt/venv/lib/python3.12/site-packages pip
ml_dtypes 0.5.3 /opt/venv/lib/python3.12/site-packages pip
more-itertools 10.8.0 /opt/venv/lib/python3.12/site-packages pip
mpmath 1.3.0 /opt/venv/lib/python3.12/site-packages pip
msgpack 1.1.1 /opt/venv/lib/python3.12/site-packages pip
multidict 6.6.4 /opt/venv/lib/python3.12/site-packages pip
multiprocess 0.70.16 /opt/venv/lib/python3.12/site-packages pip
mypy_extensions 1.1.0 /opt/venv/lib/python3.12/site-packages pip
namex 0.1.0 /opt/venv/lib/python3.12/site-packages pip
nbclient 0.10.2 /opt/venv/lib/python3.12/site-packages pip
nbconvert 7.16.6 /opt/venv/lib/python3.12/site-packages pip
nbformat 5.10.4 /opt/venv/lib/python3.12/site-packages pip
nest-asyncio 1.6.0 /opt/venv/lib/python3.12/site-packages pip
networkx 3.5 /opt/venv/lib/python3.12/site-packages pip
nh3 0.3.0 /opt/venv/lib/python3.12/site-packages pip
ninja 1.13.0 /opt/venv/lib/python3.12/site-packages pip
notebook 7.4.5 /opt/venv/lib/python3.12/site-packages pip
notebook_shim 0.2.4 /opt/venv/lib/python3.12/site-packages pip
numba 0.61.2 /opt/venv/lib/python3.12/site-packages pip
numpy 2.3.3 /opt/venv/lib/python3.12/site-packages pip
numpydantic 1.6.7 /opt/venv/lib/python3.12/site-packages pip
nvtx 0.2.13 /opt/venv/lib/python3.12/site-packages pip
oauthlib 3.2.2 /usr/lib/python3/dist-packages
omegaconf 2.3.0 /opt/venv/lib/python3.12/site-packages pip
onnx 1.17.0 /opt/venv/lib/python3.12/site-packages pip
opencv-contrib-python 4.13.0 /opt/venv/lib/python3.12/site-packages pip
opencv-python 4.11.0.86 /opt/venv/lib/python3.12/site-packages pip
opencv-python-headless 4.11.0.86 /opt/venv/lib/python3.12/site-packages pip
opt_einsum 3.4.0 /opt/venv/lib/python3.12/site-packages pip
optimum 1.27.0 /opt/venv/lib/python3.12/site-packages pip
optree 0.17.0 /opt/venv/lib/python3.12/site-packages pip
orderly-set 5.5.0 /opt/venv/lib/python3.12/site-packages pip
packaging 25.0 /opt/venv/lib/python3.12/site-packages pip
pandas 2.2.3 /opt/venv/lib/python3.12/site-packages pip
pandocfilters 1.5.1 /opt/venv/lib/python3.12/site-packages pip
parso 0.8.5 /opt/venv/lib/python3.12/site-packages pip
peft 0.17.0 /opt/venv/lib/python3.12/site-packages pip
pettingzoo 1.25.0 /opt/venv/lib/python3.12/site-packages pip
pexpect 4.9.0 /opt/venv/lib/python3.12/site-packages pip
pfzy 0.3.4 /opt/venv/lib/python3.12/site-packages pip
pid 3.0.4 /opt/venv/lib/python3.12/site-packages pip
pillow 11.3.0 /opt/venv/lib/python3.12/site-packages pip
pip 25.2 /opt/venv/lib/python3.12/site-packages pip
pkginfo 1.12.1.2 /opt/venv/lib/python3.12/site-packages pip
platformdirs 4.4.0 /opt/venv/lib/python3.12/site-packages pip
pluggy 1.6.0 /opt/venv/lib/python3.12/site-packages pip
portalocker 3.2.0 /opt/venv/lib/python3.12/site-packages pip
prometheus_client 0.22.1 /opt/venv/lib/python3.12/site-packages pip
prompt_toolkit 3.0.52 /opt/venv/lib/python3.12/site-packages pip
propcache 0.3.2 /opt/venv/lib/python3.12/site-packages pip
protobuf 6.32.0 /opt/venv/lib/python3.12/site-packages pip
psutil 7.0.0 /opt/venv/lib/python3.12/site-packages pip
ptyprocess 0.7.0 /opt/venv/lib/python3.12/site-packages pip
pure_eval 0.2.3 /opt/venv/lib/python3.12/site-packages pip
pyarrow 21.0.0 /opt/venv/lib/python3.12/site-packages pip
pycparser 2.23 /opt/venv/lib/python3.12/site-packages pip
pycuda 2025.1.1 /opt/venv/lib/python3.12/site-packages pip
pydantic 2.10.6 /opt/venv/lib/python3.12/site-packages pip
pydantic_core 2.27.2 /opt/venv/lib/python3.12/site-packages pip
Pygments 2.19.2 /opt/venv/lib/python3.12/site-packages pip
PyGObject 3.48.2 /usr/lib/python3/dist-packages
PyJWT 2.7.0 /usr/lib/python3/dist-packages debian
pynput 1.8.1 /opt/venv/lib/python3.12/site-packages pip
pyparsing 3.1.1 /usr/lib/python3/dist-packages debian
pyrsistent 0.20.0 /usr/lib/python3/dist-packages
pyserial 3.5 /opt/venv/lib/python3.12/site-packages pip
pytest 8.4.2 /opt/venv/lib/python3.12/site-packages pip
python-apt 2.7.7+ubuntu5 /usr/lib/python3/dist-packages
python-daemon 3.1.2 /opt/venv/lib/python3.12/site-packages pip
python-dateutil 2.9.0.post0 /opt/venv/lib/python3.12/site-packages pip
python-json-logger 3.3.0 /opt/venv/lib/python3.12/site-packages pip
python-xlib 0.33 /opt/venv/lib/python3.12/site-packages pip
pytools 2025.2.4 /opt/venv/lib/python3.12/site-packages pip
pytorch3d 0.7.8 /opt/venv/lib/python3.12/site-packages pip
pytz 2025.2 /opt/venv/lib/python3.12/site-packages pip
PyYAML 6.0.2 /opt/venv/lib/python3.12/site-packages pip
pyyaml-include 1.4.1 /opt/venv/lib/python3.12/site-packages pip
pyzmq 27.1.0 /opt/venv/lib/python3.12/site-packages pip
ray 2.40.0 /opt/venv/lib/python3.12/site-packages pip
readme_renderer 44.0 /opt/venv/lib/python3.12/site-packages pip
referencing 0.36.2 /opt/venv/lib/python3.12/site-packages pip
regex 2025.9.1 /opt/venv/lib/python3.12/site-packages pip
requests 2.32.3 /opt/venv/lib/python3.12/site-packages pip
requests-toolbelt 1.0.0 /opt/venv/lib/python3.12/site-packages pip
rerun-sdk 0.24.1 /opt/venv/lib/python3.12/site-packages pip
rfc3339-validator 0.1.4 /opt/venv/lib/python3.12/site-packages pip
rfc3986 2.0.0 /opt/venv/lib/python3.12/site-packages pip
rfc3986-validator 0.1.1 /opt/venv/lib/python3.12/site-packages pip
rfc3987-syntax 1.1.0 /opt/venv/lib/python3.12/site-packages pip
rich 14.1.0 /opt/venv/lib/python3.12/site-packages pip
rpds-py 0.27.1 /opt/venv/lib/python3.12/site-packages pip
safetensors 0.6.2 /opt/venv/lib/python3.12/site-packages pip
scikit-build 0.18.1 /opt/venv/lib/python3.12/site-packages pip
scikit-image 0.25.2 /opt/venv/lib/python3.12/site-packages pip
scipy 1.16.1 /opt/venv/lib/python3.12/site-packages pip
SecretStorage 3.4.0 /opt/venv/lib/python3.12/site-packages pip
semantic-version 2.10.0 /opt/venv/lib/python3.12/site-packages pip
Send2Trash 1.8.3 /opt/venv/lib/python3.12/site-packages pip
sentencepiece 0.2.1 /opt/venv/lib/python3.12/site-packages pip
sentry-sdk 2.37.1 /opt/venv/lib/python3.12/site-packages pip
service 0.6.0 /opt/venv/lib/python3.12/site-packages pip
setproctitle 1.3.7 /opt/venv/lib/python3.12/site-packages pip
setuptools 80.9.0 /opt/venv/lib/python3.12/site-packages pip
setuptools-rust 1.12.0 /opt/venv/lib/python3.12/site-packages pip
shtab 1.7.2 /opt/venv/lib/python3.12/site-packages pip
siphash24 1.8 /opt/venv/lib/python3.12/site-packages pip
six 1.16.0 /usr/lib/python3/dist-packages
smmap 5.0.2 /opt/venv/lib/python3.12/site-packages pip
sniffio 1.3.1 /opt/venv/lib/python3.12/site-packages pip
soupsieve 2.8 /opt/venv/lib/python3.12/site-packages pip
stack-data 0.6.3 /opt/venv/lib/python3.12/site-packages pip
sympy 1.14.0 /opt/venv/lib/python3.12/site-packages pip
tensorboard 2.20.0 /opt/venv/lib/python3.12/site-packages pip
tensorboard-data-server 0.7.2 /opt/venv/lib/python3.12/site-packages pip
tensorflow 2.20.0 /opt/venv/lib/python3.12/site-packages pip
tensorrt 10.13.2.6 /opt/venv/lib/python3.12/site-packages pip
termcolor 3.1.0 /opt/venv/lib/python3.12/site-packages pip
terminado 0.18.1 /opt/venv/lib/python3.12/site-packages pip
tf_keras 2.20.1 /opt/venv/lib/python3.12/site-packages pip
tianshou 0.5.1 /opt/venv/lib/python3.12/site-packages pip
tifffile 2025.9.9 /opt/venv/lib/python3.12/site-packages pip
timm 1.0.14 /opt/venv/lib/python3.12/site-packages pip
tinycss2 1.4.0 /opt/venv/lib/python3.12/site-packages pip
tokenizers 0.21.4 /opt/venv/lib/python3.12/site-packages pip
toml 0.10.2 /opt/venv/lib/python3.12/site-packages pip
torch 2.9.0 /opt/venv/lib/python3.12/site-packages pip
torchvision 0.24.0 /opt/venv/lib/python3.12/site-packages pip
tornado 6.5.2 /opt/venv/lib/python3.12/site-packages pip
tqdm 4.67.1 /opt/venv/lib/python3.12/site-packages pip
traitlets 5.14.3 /opt/venv/lib/python3.12/site-packages pip
transformers 4.51.3 /opt/venv/lib/python3.12/site-packages pip
triton 3.5.0+gite3b8f77a /opt/venv/lib/python3.12/site-packages pip
twine 6.2.0 /opt/venv/lib/python3.12/site-packages pip
typeguard 4.4.2 /opt/venv/lib/python3.12/site-packages pip
types-python-dateutil 2.9.0.20250822 /opt/venv/lib/python3.12/site-packages pip
typing_extensions 4.12.2 /opt/venv/lib/python3.12/site-packages pip
typing-inspect 0.9.0 /opt/venv/lib/python3.12/site-packages pip
tyro 0.9.17 /opt/venv/lib/python3.12/site-packages pip
tzdata 2025.2 /opt/venv/lib/python3.12/site-packages pip
uri-template 1.3.0 /opt/venv/lib/python3.12/site-packages pip
urllib3 2.5.0 /opt/venv/lib/python3.12/site-packages pip
uv 0.8.16 /opt/venv/lib/python3.12/site-packages pip
wadllib 1.3.6 /usr/lib/python3/dist-packages
wandb 0.18.0 /opt/venv/lib/python3.12/site-packages pip
wcwidth 0.2.13 /opt/venv/lib/python3.12/site-packages pip
webcolors 24.11.1 /opt/venv/lib/python3.12/site-packages pip
webencodings 0.5.1 /opt/venv/lib/python3.12/site-packages pip
websocket-client 1.8.0 /opt/venv/lib/python3.12/site-packages pip
Werkzeug 3.1.3 /opt/venv/lib/python3.12/site-packages pip
wheel 0.45.1 /opt/venv/lib/python3.12/site-packages pip
widgetsnbextension 4.0.14 /opt/venv/lib/python3.12/site-packages pip
wrapt 1.17.3 /opt/venv/lib/python3.12/site-packages pip
xxhash 3.5.0 /opt/venv/lib/python3.12/site-packages pip
yarl 1.20.1 /opt/venv/lib/python3.12/site-packages pip
zipp 3.23.0 /opt/venv/lib/python3.12/site-packages pip
该镜像可以直接从 Docker Hub 拉取,包含常用的依赖项,如 PyTorch、TensorRT 和 FlashAttention:
docker pull johnnync/isaac-gr00t:r38.2.arm64-sbsa-cu130-24.04
此 Docker 镜像不支持调用 LeRobot 脚本进行 ACT 模型推理。如果您需要运行完整的 LeRobot 脚本套件,请使用此镜像之外的环境。
要在 Thor 上运行 Docker,请参考以下命令。将 your_docker_img:tag 替换为您的 Docker 镜像名称和标签,或使用镜像 ID:
sudo docker run --rm -it \
--network=host \
-e NVIDIA_DRIVER_CAPABILITIES=compute,utility,video,graphics \
--runtime nvidia \
--privileged \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /etc/X11:/etc/X11 \
--device /dev/nvhost-vic \
-v /dev:/dev \
your_docker_img:tag
使用 SO-ARM 进行数据收集
有关数据收集的详细教程,请参考以下链接:
https://wiki.seeedstudio.com/cn/lerobot_so100m_new/#record-the-dataset
此链接包含 SO-ARM 的完整教程,涵盖配置、组装、校准、数据收集、训练和推理。
lerobot 机械臂的数据收集可以在 PC 上执行,也可以直接在 Jetson 设备上执行。
- 方法 1:使用 Jetson 收集数据
- 方法 2:使用 Ubuntu PC 收集数据
两种方法的数据收集程序基本相同。
Jetson 可能无法同时流式传输两个具有相同带宽要求的 USB 摄像头。如果您连接两个 USB 摄像头,它们必须连接到不同的 USB 集线器芯片!
要在 Thor 上同时流式传输两个 USB 摄像头,在将一个摄像头连接到 USB-A 端口后,您还需要使用通过 USB Type-C 端口连接的外部 USB 集线器。这确保第二个 USB 摄像头挂载到 Thor 内的不同 USB 集线器控制器。 兼容的 USB Type-C 集线器示例如下所示:

USB Type-C 扩展坞必须连接到 Thor 上的特定端口,以确保外设正常工作,如下所示:

Lerobot 环境设置(可选)
Lerobot 的开发环境设置过程可以在以下链接的子章节中找到:
https://wiki.seeedstudio.com/cn/lerobot_so100m_new/#install-lerobot
配置电机
SO-ARM 各关节上的电机需要在组装前进行配置。配置步骤可以在以下链接的子章节中找到:
https://wiki.seeedstudio.com/cn/lerobot_so100m_new/#configure-the-motors
组装
SO-ARM 主臂和从臂的安装过程可以在以下链接的子章节中找到:
https://wiki.seeedstudio.com/cn/lerobot_so100m_new/#assembly
SO-ARM 校准
SO-ARM 完全组装后,需要进行校准。校准程序请参考以下链接的子章节:
https://wiki.seeedstudio.com/cn/lerobot_so100m_new/#calibrate
校准机械臂时,请不要连接任何 USB 摄像头,因为这可能导致端口冲突或端口分配错误。
运行校准脚本后,手动移动机械臂的每个关节,确保其达到完整的运动范围!否则可能导致遥操作期间主臂和从臂姿态不匹配。
摄像头添加
通常建议在机械臂的腕部/夹爪上安装一个摄像头,在桌面表面安装另一个摄像头,以确保对机械臂姿态的适当覆盖。 具体的安装方法取决于您的应用场景;下面显示的示例仅供参考。
详细信息请参考以下链接的子章节:
https://wiki.seeedstudio.com/cn/lerobot_so100m_new/#add-cameras
数据收集
完成摄像头安装和机械臂校准后,数据集收集程序可以在以下链接的子章节中找到:
https://wiki.seeedstudio.com/cn/lerobot_so100m_new/#record-the-dataset
可视化收集的数据
要可视化在 SO-ARM 上收集的数据,请参考以下链接的子章节:
https://wiki.seeedstudio.com/cn/lerobot_so100m_new/#visualize-the-dataset
策略训练
基于收集的数据,训练策略的程序可以在以下链接的子章节中找到:
https://wiki.seeedstudio.com/cn/lerobot_so100m_new/#train-a-policy
在以下章节中,我们将介绍基于云的训练平台并演示基本用法。您可以选择在远程服务器上更高效地完成训练。
如果您选择在云端训练策略,请确保您的数据集提前上传到云服务器,或从 Hugging Face Hub 下载。但是,由于直接从 Hugging Face Hub 下载时可能出现网络问题,强烈建议手动将数据集上传到您的云服务器。
使用 NVIDIA Brev 训练策略
NVIDIA Brev 提供对流行云平台上 NVIDIA GPU 实例的简化访问、自动环境设置和灵活的部署选项,使开发者能够立即开始实验。
平台访问 URL: https://login.brev.nvidia.com/signin
您需要注册一个账户来使用该平台。本节介绍训练平台的基本用法。
启用基于云的训练平台
分步说明
- 创建云服务器实例 - 步骤 1
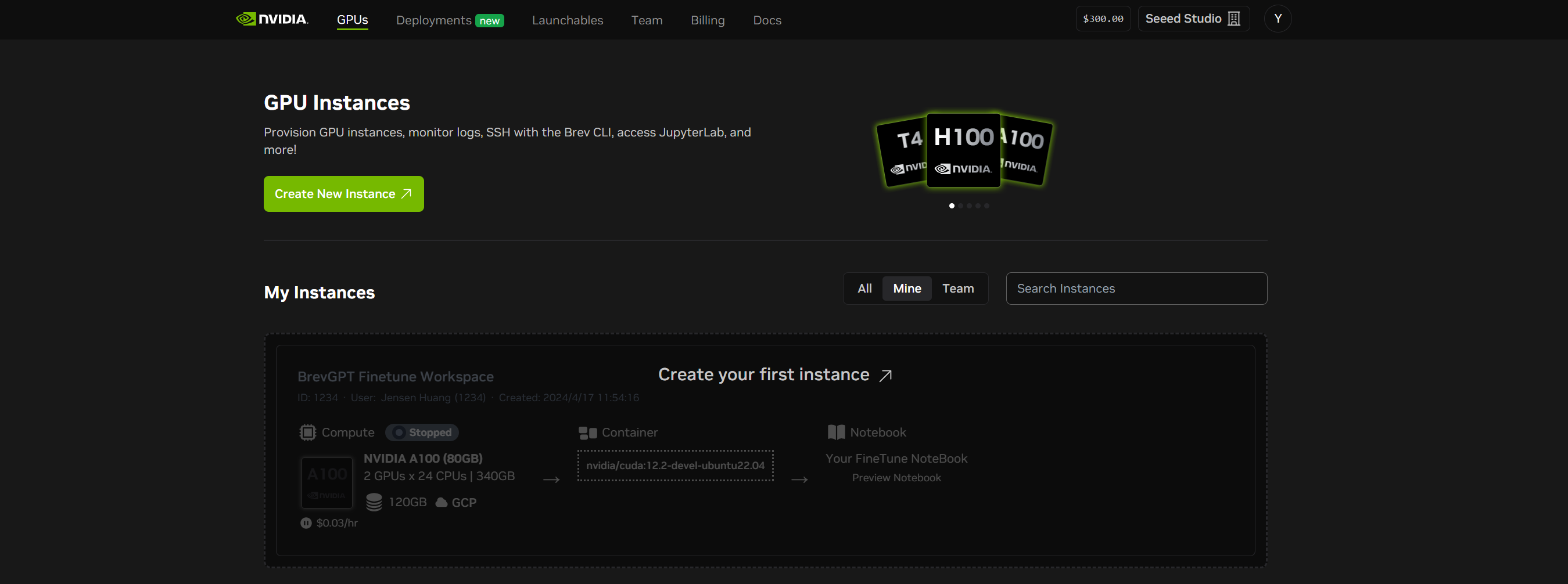
- 创建云服务器实例 - 步骤 2
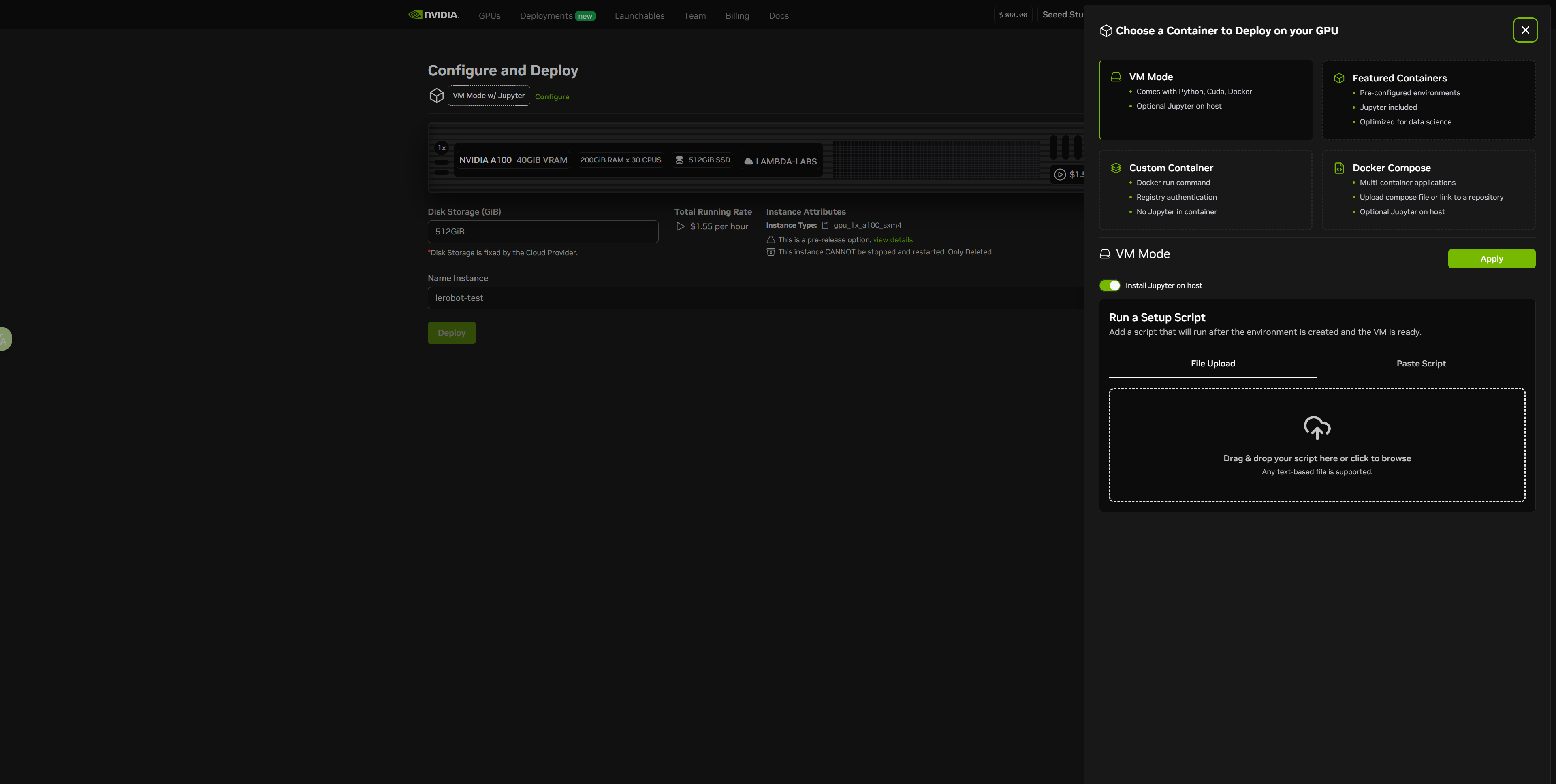
- 创建云服务器实例 - 步骤 3
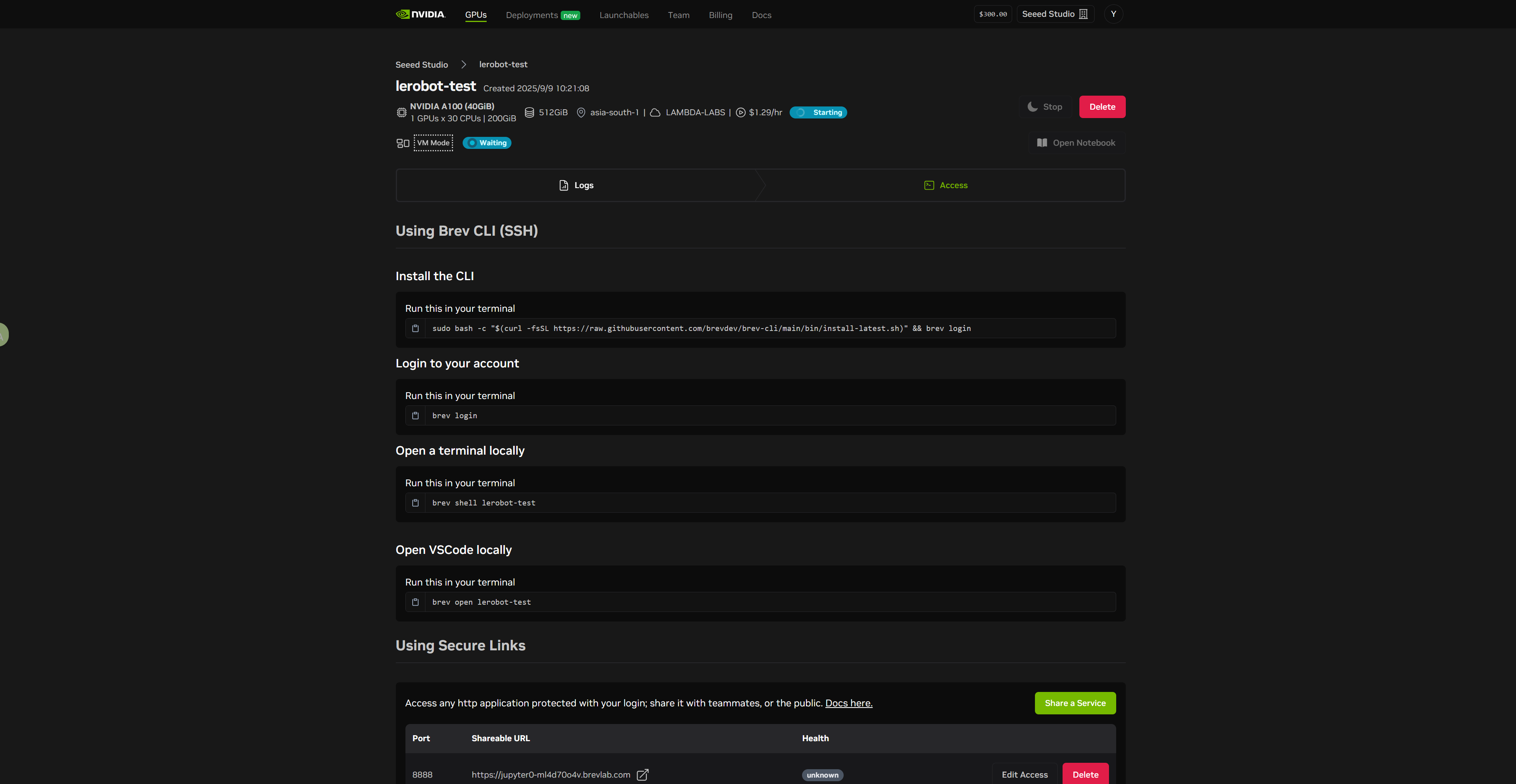
启动基于 Web 的 Jupyter Notebook:

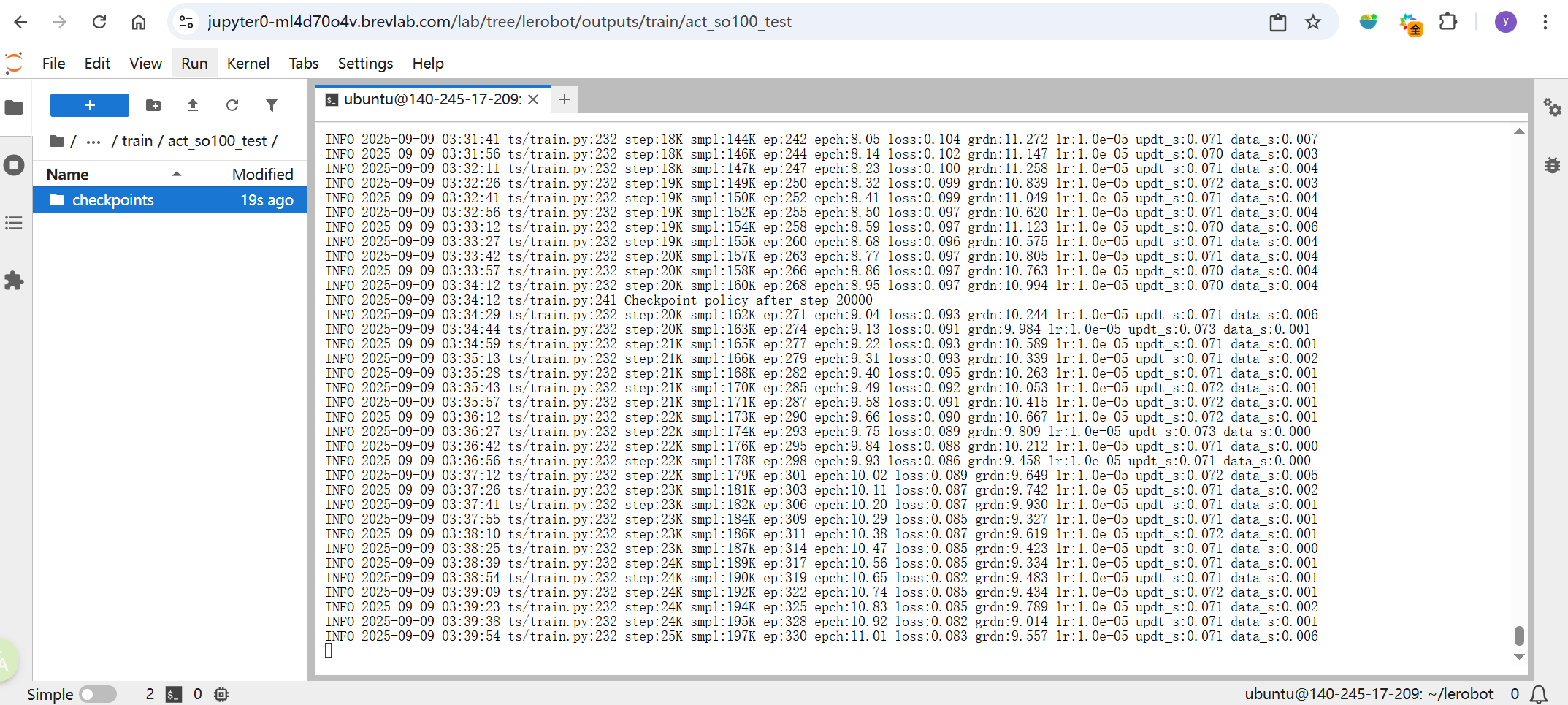
训练模型并从服务器导出
开发者可以直接在 notebook 终端中训练模型。以下是训练 GR00T N1.5 并随后从服务器导出的示例。
在服务器上安装 Conda:
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
source ~/miniconda3/bin/activate
conda init --all
克隆 Isaac-GR00T 仓库:
git clone https://github.com/NVIDIA/Isaac-GR00T
cd Isaac-GR00T
创建 gr00t 环境:
conda create -n gr00t python=3.10
conda activate gr00t
pip install --upgrade setuptools
pip install -e .[base]
pip install --no-build-isolation flash-attn==2.7.1.post4
如果您在云平台上训练或微调 GR00T,必须使用 Ampere 或更新架构的 GPU(例如 RTX A6000 或 GeForce RTX 4090)。V100(Volta)不支持 GR00T 训练或微调。
有关微调模型的更多详细信息,请参考: https://huggingface.co/blog/nvidia/gr00t-n1-5-so101-tuning#:~:text=1.2%20Configure%20Modality%20File
微调 GR00T N1.5 模型:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av
默认的微调设置需要约 25G 的显存。如果您没有那么多显存,请尝试在 gr00t_finetune.py 脚本中添加 --no-tune_diffusion_model 标志。
如果您想在服务器上训练或微调 Gr00t,可以参考此链接。
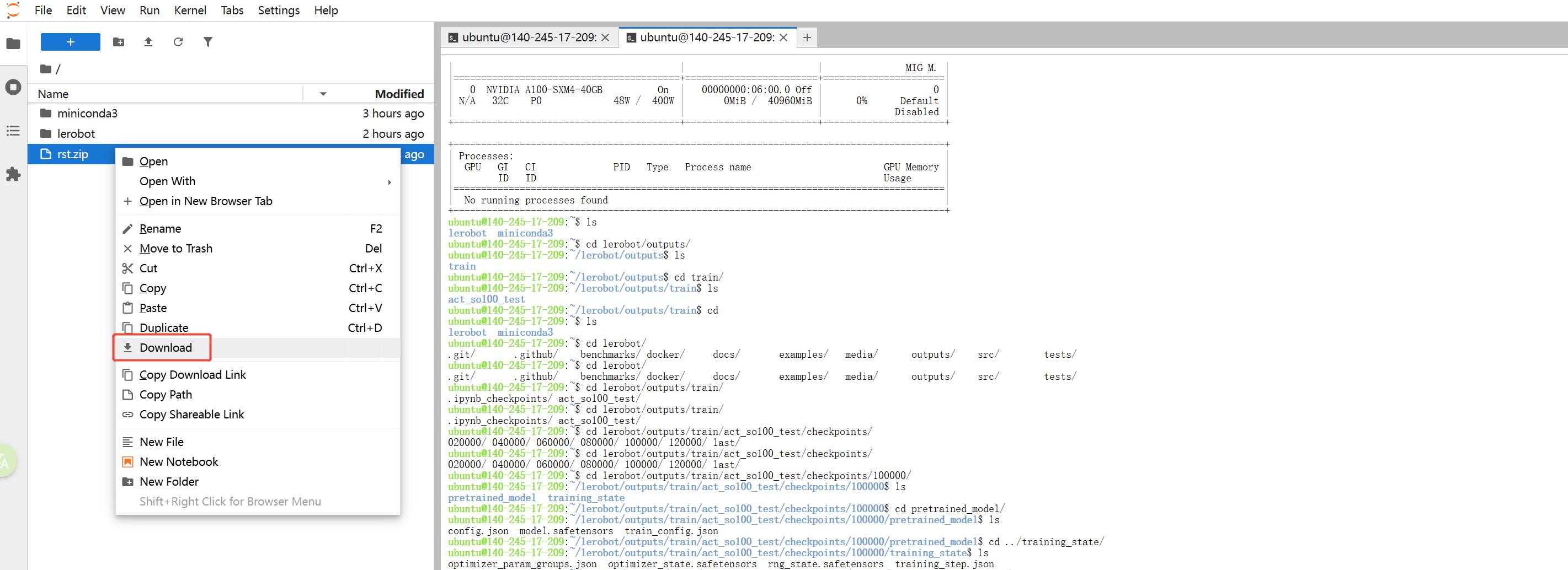
训练完成后,您可能希望将模型下载到本地机器。但 Jupyter Notebook 侧边栏不支持直接导航到模型训练文件夹。
解决方案是:首先将目标文件夹压缩为 .zip 或 .tar.gz 归档文件,然后通过 notebook 界面下载归档文件。参考下图示例。
在 Thor 上进行 Isaac GR00T N1.5 推理
Jetson AGX Thor 作为强大的边缘计算和部署平台,提供了足够的资源来支持大规模模型推理。在本节中,基于之前介绍的内容,我们演示如何在 Thor 上运行 GR00T N1.5 的推理。
GR00T N1.5 是 NVIDIA Research 在机器人学习领域发布的开源基线系统。它旨在为具身 AI 训练和推理提供统一框架,特别专注于模仿学习和大规模模型驱动的策略学习。
准备工作
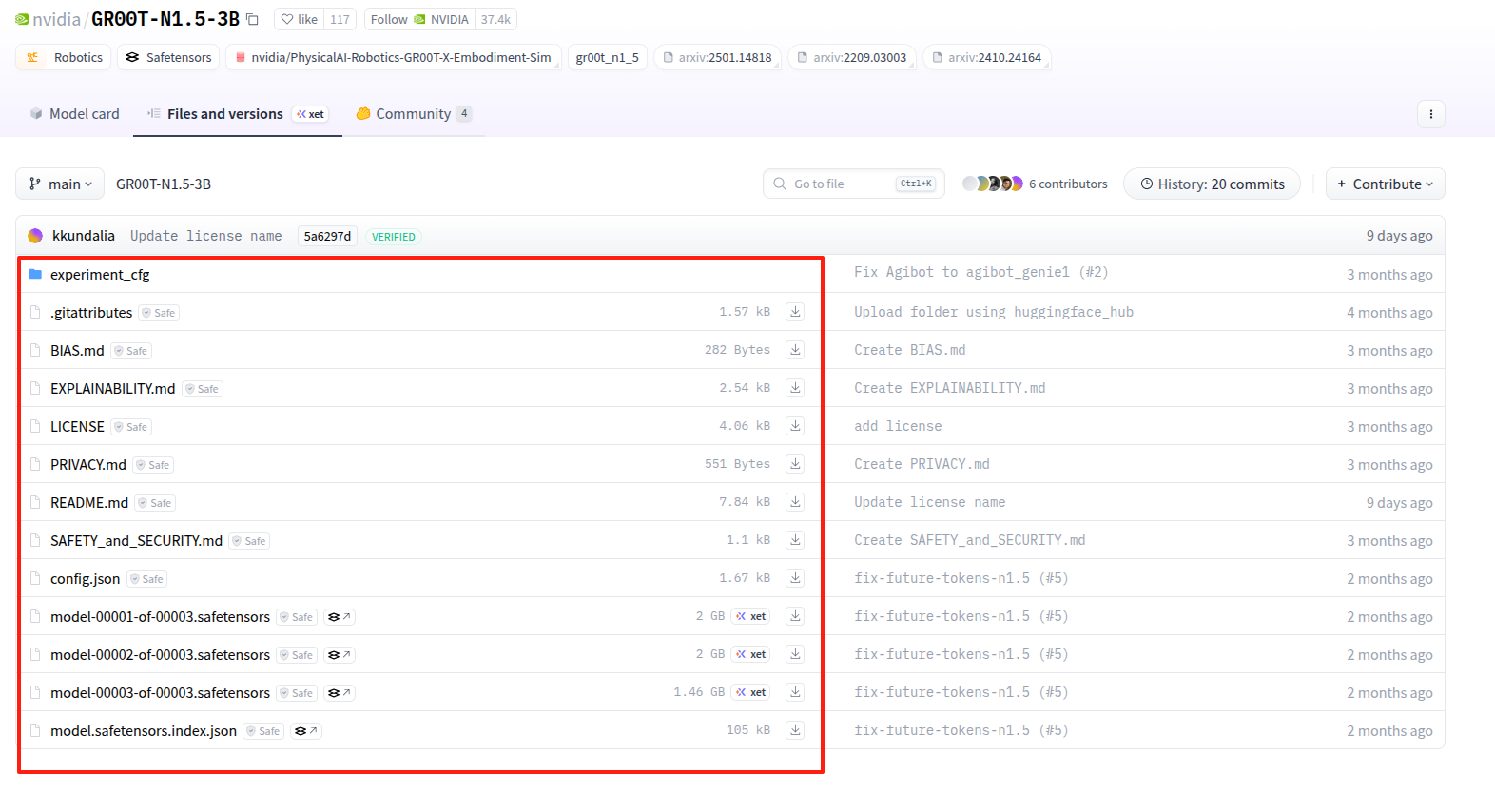
GR00T N1.5 的预训练模型可通过 Hugging Faces 获取。您可以从以下链接下载:
https://huggingface.co/nvidia/GR00T-N1.5-3B/tree/main
GR00T 推理所需的所有依赖项都已在专用 Docker 镜像中预配置。
使用以下命令启动容器:
sudo docker run --rm -it \
--network=host \
-e NVIDIA_DRIVER_CAPABILITIES=compute,utility,video,graphics \
--runtime nvidia \
--privileged \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /etc/X11:/etc/X11 \
--device /dev/nvhost-vic \
-v /dev:/dev \
lerobot:r38.2.aarch64-cu130-24.04
Git 克隆 Gr00t 的源代码并安装:
git clone https://github.com/NVIDIA/Isaac-GR00T.git
cd Isaac-GR00T
pip install --upgrade setuptools
pip install -e .[thor]
Gr00t 完全兼容使用 lerobot 框架收集的数据集。请参考前面的"数据收集"部分来准备您的数据集,以便对 Gr00t 模型进行微调。
模型微调(可选)
如果您已经在 NVIDIA Brev 中微调了 GR00T N1.5,可以跳过 Thor 上的这一步。
微调过程可以在提供的云训练平台上执行,也可以直接在 Thor 的 Docker 容器内执行。
如果您尚未下载任何预训练的 GR00T 模型且不打算使用自定义版本,可以使用以下命令基于 Hugging Face 权重进行微调:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av
此脚本将自动从 Hugging Face 下载预训练的 GR00T 模型并开始微调过程。
如果您希望使用本地存储的预训练 GR00T 模型,请按如下方式修改命令:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av \
--base-model-path ./pretrained/GR00T-N1.5-3
--dataset-path 是来自 SO-ARM 的收集数据的文件路径。
默认微调设置需要约 25G 显存。如果您没有那么多显存,请尝试在 gr00t_finetune.py 脚本中添加 --no-tune_diffusion_model 标志。
使用 GR00T N1.5 运行推理
为了获得最佳性能,建议在部署微调后的 GR00T 模型时尽可能复制数据收集期间使用的真实世界设置。这是因为模型的泛化能力有限。

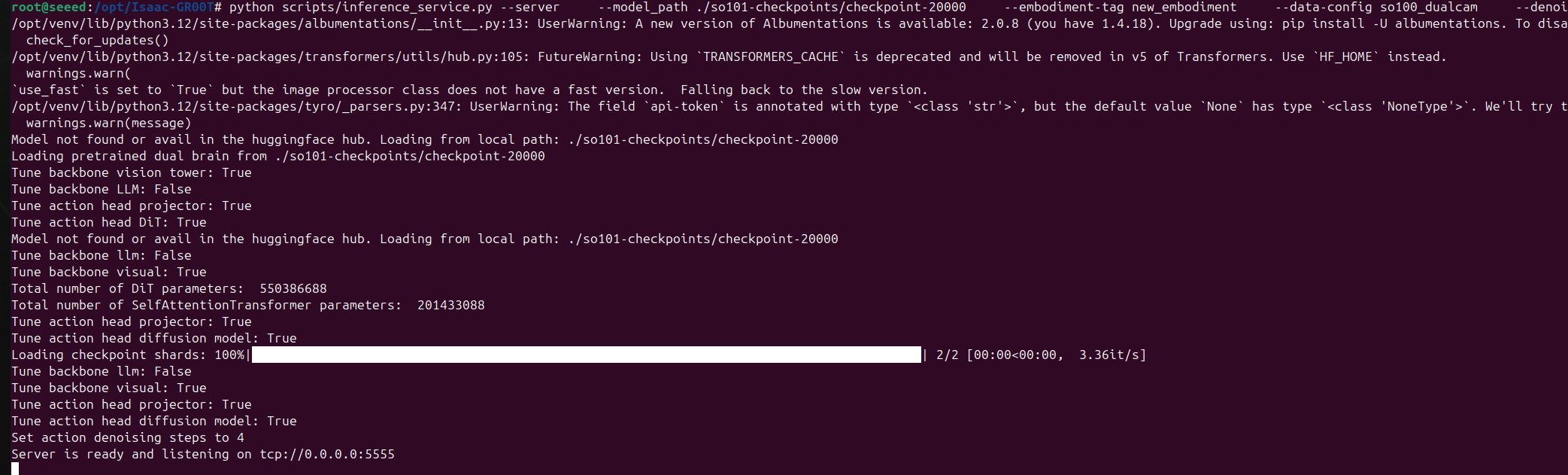
在 Docker 容器内,打开终端并启动 GR00T 推理服务:
python scripts/inference_service.py --server \
--model_path ./so101-checkpoints \
--embodiment-tag new_embodiment \
--data-config so100_dualcam \
--denoising-steps 4
成功启动后,终端应显示类似以下的日志:
打开另一个终端,使用以下命令从不同的 shell 进入同一个容器:
sudo docker exec -it <container id> /bin/bahs
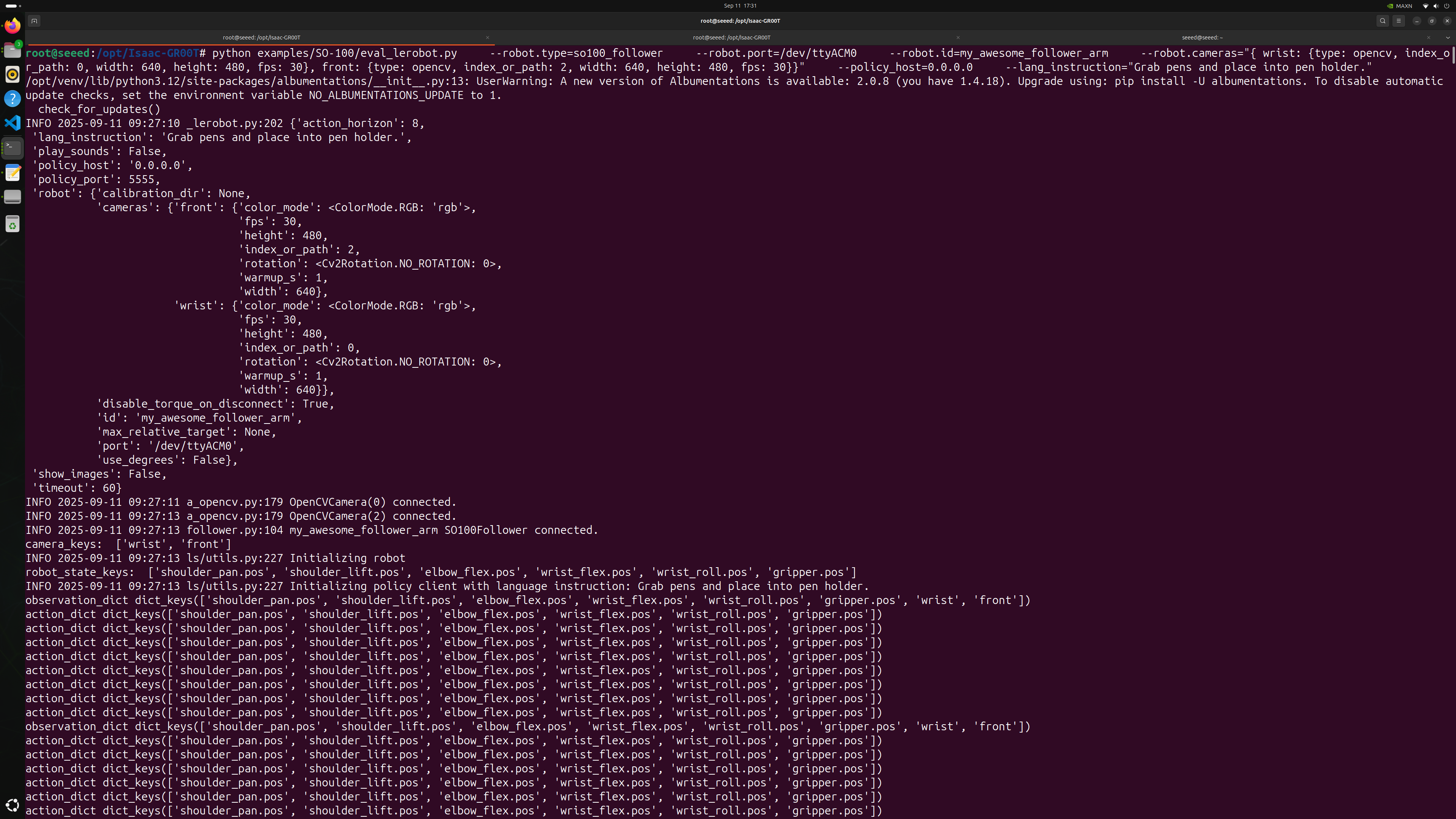
然后,在第二个 shell 中启动推理客户端:
python examples/SO-100/eval_lerobot.py \
--robot.type=so100_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ wrist: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30}, front: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30}}" \
--policy_host=0.0.0.0 \
--lang_instruction="Grab pens and place into pen holder."
将 index_or_path 替换为您相机的索引号;您可以通过运行 ls /dev/video* 来找到它。
当客户端进程成功启动时,应出现以下输出:
在首次运行客户端进程时,您必须校准机械臂的舵机。校准过程与前面描述的相同。
确保每个关节都移动到其完整的运动范围,以确保正确的遥操作和推理行为。
一旦一切设置完成,GR00T N1.5 就可以成功部署在 Jetson AGX Thor 上。系统和硬件环境现已验证支持完整推理:
常见问题
Q1:Brev CLI 工具在云训练平台上不工作?
这通常是由于网络问题。
您可以在本地 Ubuntu 主机上安装并登录 Brev CLI,然后尝试从本地终端使用 SSH 连接到您的云实例。
Q2:如何将数据上传到训练平台?
使用以下命令:scp <local-file-path> <brev-instance-name>:<remote-file-path>,例如 scp -r ./record_2_cameras/ gr00t-trainer:/home/ubuntu/Datasets
Q3:Thor 的屏幕在安装开始后变黑
如果您在之前使用过或设置过的 Jetson AGX Thor 开发套件上使用 Jetson 安装 USB 棒,您需要在 UEFI 设置菜单 中启用 SoC Display Hand-Off。
实际上,在此期间刷写在后台继续进行;过一段时间后,Ubuntu 桌面将出现。
Q4:我在显示器上没有视频输出(通过 KVM 连接)
已知某些 KVM 切换器/设备无法很好地处理来自 Jetson AGX Thor 开发套件的视频输出。请将显示器直接连接到 Jetson AGX Thor 开发套件。
Q5:刷写 Thor 后,HDMI 在后续启动时有时显示无信号
一个已证明有效的解决方法是切换到 DisplayPort (DP) 连接器进行显示输出。
Q6:Thor 镜像刷写期间未检测到键盘输入
我们建议在刷写期间使用有线键盘。无线键盘在 Thor 刷写过程中可能兼容性有限。
Q7:GR00T 的云微调报告"GPU 不支持"
不要使用比 Ampere 架构 更旧的 GPU 进行 GR00T 的云微调。(例如,RTX A6000 或 GeForce RTX 4090)。V100 (Volta) 不支持 GR00T 训练或微调。
Q8:机械臂控制器板的串行设备名称未出现在 /dev 下
原装 Thor 系统不包含 CH34x 驱动程序。如果缺少,请从以下位置安装:
https://github.com/juliagoda/CH341SER
Q9:Thor 上的 Type-C 端口无法识别外部集线器
要通过 Thor 的 Type-C 使用外部集线器,请将其插入最靠近 QSFP28 连接器的 Type-C 端口。(两个 Type-C 端口都提供电源,但只有指定的端口能可靠支持集线器。)
Q10:使用采集卡刷写时,系统后来说用户密码不正确
在刷写期间使用采集卡桌面时,可能会出现键盘输入错误(输入与键入的内容不匹配)。请在设置时仔细检查用户密码。
Q11:Thor 的调试端口在哪里?
Thor 的 Type-C 调试端口隐藏在磁性盖下。可能会创建多个串行设备节点;使用索引最小的那个通过串行登录到 Thor。
Q12:无法在 GR00T 镜像中运行 LeRobot 脚本来推理 ACT
我们不建议在 Python 3.12 环境中调用 LeRobot API 进行 ACT 推理。校准 和 查找端口 脚本是可以的。请注意,Ubuntu 24 本地默认使用 Python 3.12。
Q13:如何检查 Thor 上的 GPU SM 利用率?
运行:
nvidia-smi dmon -s puc
检查输出中的 sm 列。
Q14:无法从机械臂驱动器的串行端口读取数据
不要在 SO-ARM 驱动板之前插入摄像头;这样做可能导致串行设备映射错误。同时确保已授予串行端口权限。
参考资料
- https://developer.nvidia.com/embedded/jetpack
- https://huggingface.co/blog/nvidia/gr00t-n1-5-so101-tuning
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。