为 reBot Arm 微调 GR00T N1.7 并部署到 Jetson Thor
介绍
本维基介绍如何为 reBot Arm B601 DM 微调 NVIDIA Isaac GR00T N1.7,并在 reComputer Robotics J601 上使用 TensorRT 加速进行部署。
NVIDIA GR00T N1.7 作为一款前沿的端到端视觉-语言-动作(Vision-Language-Action,VLA)基础模型,在具身智能的发展中迈出了重要一步。它无缝衔接感知与执行,使机器人能够将复杂的视觉输入和语言指令直接转化为现实世界中的物理动作。在全新的 Cosmos Reason2-2B 视觉语言模型的驱动下,GR00T N1.7 拥有前所未有的环境感知能力,而其最先进的 DiT(Diffusion Transformer)动作解码器则带来极其平滑的动作生成效果,并在真实环境干扰下依然保持极高的鲁棒性。

硬件需求
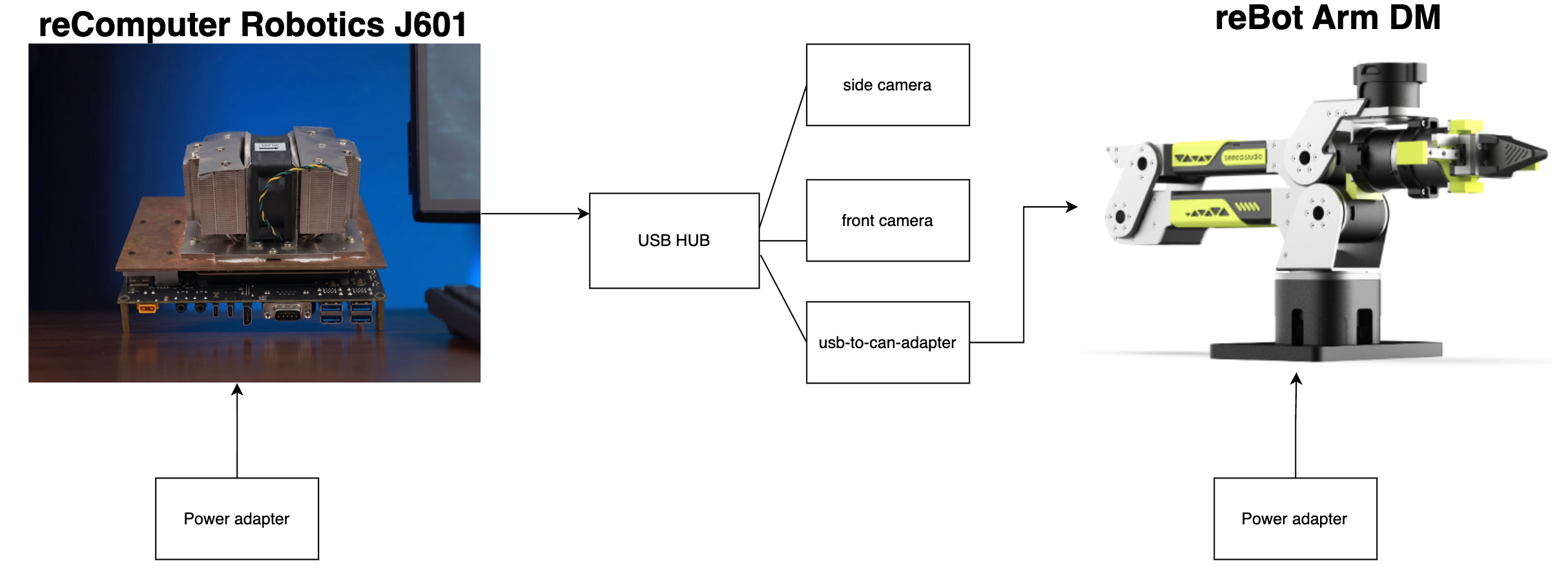
- 搭载 NVIDIA Jetson Thor 的 reComputer Robotics J601(已安装 JetPack 7.x)
- reBot Arm B601 DM
- Star Arm 102 for reBot Arm B601‑DM Leader
- USB-to-CAN 适配器
- USB 相机 x2
- 机械臂的电源和 USB 线缆
硬件连接
数据采集
如果你想部署自己的 VLA 模型,首先需要采集一份适合当前任务的数据集,用于对模型进行微调,使其能够适配我们的抓取任务。你可以参考这篇维基进行环境配置和数据采集。
模型微调
准备 Python 环境
在微调服务器(带 GPU 的 x86 机器)上克隆仓库并配置环境:
sudo apt install git-lfs && git lfs install
git clone --recurse-submodules https://github.com/NVIDIA/Isaac-GR00T
cd Isaac-GR00T
sudo apt-get update && sudo apt-get install -y ffmpeg
uv sync --python 3.10
cd /examples/SO100/
uv pip install -e .
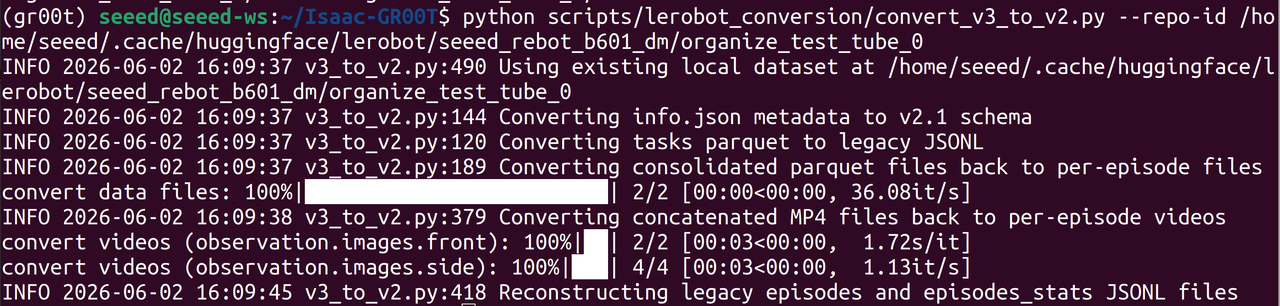
数据集转换
通过 LeRobot 框架采集的数据集为 v3.0 格式,而 GR00T 需要 v2.0 格式。运行 Isaac-GR00T 仓库中提供的转换脚本:
cd <path-to-isaac-gr00t>
uv run --project scripts/lerobot_conversion \
python scripts/lerobot_conversion/convert_v3_to_v2.py \
--repo-id /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/organize_test_tube
请将文件路径替换为你自己的数据集路径。
执行完成后,之前采集的 LeRobot 数据集将从 v3.0 降级为 v2.0 格式。
然后将下面的 modality.json 文件复制到已转换数据集的 meta 文件夹中:
modality.json(点击展开)
{
"state": {
"single_arm": {
"start": 0,
"end": 6
},
"gripper": {
"start": 6,
"end": 7
}
},
"action": {
"single_arm": {
"start": 0,
"end": 6
},
"gripper": {
"start": 6,
"end": 7
}
},
"video": {
"front": {
"original_key": "observation.images.front"
},
"side": {
"original_key": "observation.images.side"
}
},
"annotation": {
"human.task_description": {
"original_key": "task_index"
}
}
}
微调 GR00T N1.7
当数据集准备就绪后,运行微调脚本:
cd <path-to-isaac-gr00t>
uv pip uninstall deepspeed
export MAX_STEPS=10000
export SAVE_STEPS=5000
bash examples/finetune.sh \
--base-model-path nvidia/GR00T-N1.7-3B \
--dataset-path /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/organize_test_tube_0 \
--modality-config-path examples/SO100/so100_config.py \
--embodiment-tag NEW_EMBODIMENT \
--output-dir ~/output
请将文件路径替换为你自己的数据集路径和输出目录路径。
由于我们的训练数据集相对较小,你可以减少训练步数以节省算力资源。
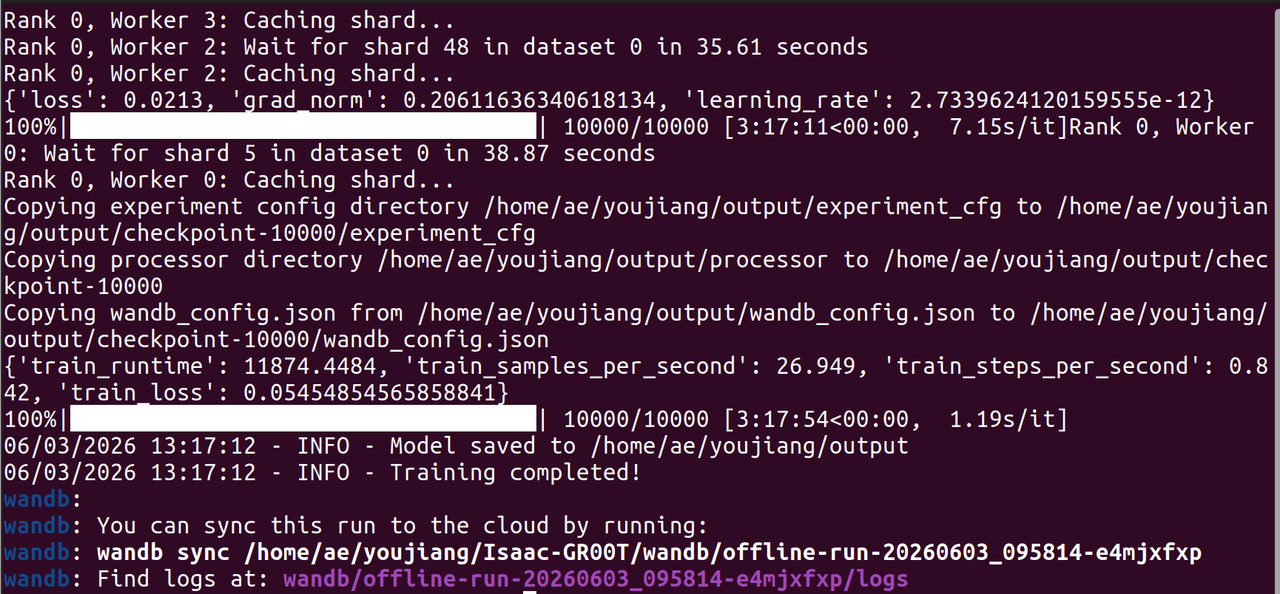
训练完成后,你可以在 --output-dir 目录中找到微调后的 GR00T N1.7 模型文件。

在 Jetson 上部署
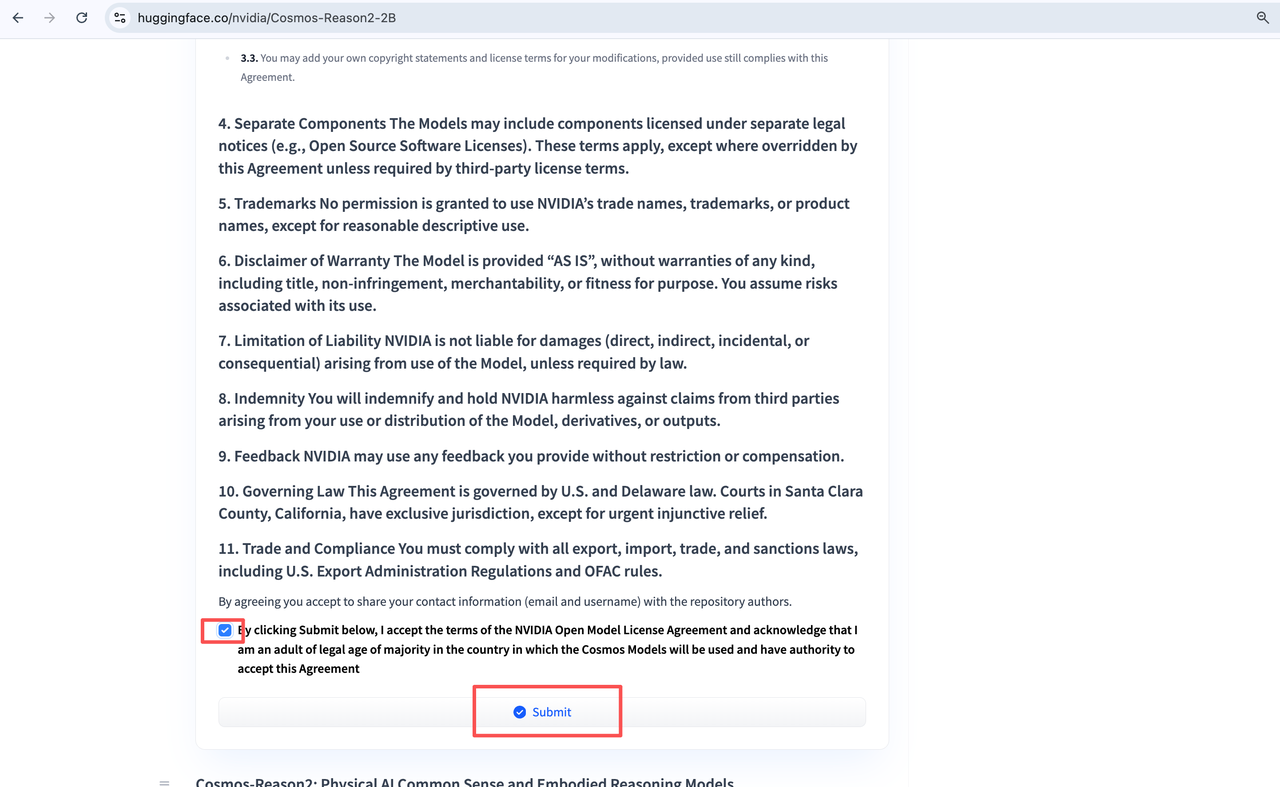
权限获取
要从 Hugging Face 下载模型和数据集,你需要先为所需的仓库授予访问权限。
安装 Hugging Face CLI 并登录:
uv tool install -U "huggingface_hub[cli]"
# Log in to your Hugging Face account and input your token
hf auth login
访问以下链接,为所需模型获取下载权限: 🔗 https://huggingface.co/nvidia/Cosmos-Reason2-2B
克隆仓库
# Install git-lfs
sudo apt install git-lfs && git lfs install
# Clone the repository
git clone --recurse-submodules https://github.com/NVIDIA/Isaac-GR00T
cd Isaac-GR00T
git submodule update --init --recursive
Docker 环境配置(推荐)
Thor 使用 CUDA 13 和 Python 3.12,其依赖栈与 x86 或 Orin 不同。已在 JetPack 7.1 上测试。Thor 上有两种运行方式:Docker(推荐)或裸机。
在仓库根目录构建 Thor 容器:
cd docker && sudo bash build.sh --profile=thor
下载微调后的模型(在宿主机上运行一次即可):
uv run hf download nvidia/GR00T-N1.7-LIBERO \
--include "libero_10/config.json" \
"libero_10/embodiment_id.json" \
"libero_10/model-*.safetensors" \
"libero_10/model.safetensors.index.json" \
"libero_10/processor_config.json" \
"libero_10/statistics.json" \
--local-dir checkpoints/GR00T-N1.7-LIBERO
启动交互式 Docker 会话(推荐用于多步骤 TRT 工作):
# Add Docker to the user group
sudo usermod -aG docker $USER
docker run -it --rm --runtime nvidia --gpus all \
--ipc=host \
--ulimit memlock=-1 \
--ulimit stack=67108864 \
--network host \
-v "$(pwd)":/workspace/repo \
-v "${HF_HOME:-${HOME}/.cache/huggingface}":/root/.cache/huggingface \
-w /workspace/repo \
-e HF_TOKEN="${HF_TOKEN:-}" \
gr00t-thor \
bash
裸机环境配置
如果你不想使用 Docker,也可以直接安装依赖:
bash scripts/deployment/thor/install_deps.sh
# In each new shell
source .venv/bin/activate
source scripts/activate_thor.sh
环境验证
你可以运行一次 PyTorch 推理来验证环境是否配置正确。
在运行脚本之前,你需要提前登录 Hugging Face 账号并输入你的 token。
# Run inference on demo trajectories using PyTorch (no TRT setup needed):
uv run python scripts/deployment/standalone_inference_script.py \
--model-path checkpoints/GR00T-N1.7-LIBERO/libero_10 \
--dataset-path demo_data/libero_demo \
--embodiment-tag LIBERO_PANDA \
--traj-ids 0 1 2 3 4 \
--inference-mode pytorch \
--action-horizon 8
数据集格式转换
GR00T 仅支持 LeRobot v2.1 格式的数据集。然而,使用 LeRobot 框架采集数据时所使用的数据集格式为 v3.0。要在 Jetson 上导出加速的 TensorRT 引擎模型,需要将数据集格式转换为与 GR00T 训练时相同的格式。
将下面的转换脚本保存为 scripts/convert_v3_to_v2.py,放在 Isaac-GR00T 仓库中:
convert_v3_to_v2.py(点击展开)
#!/usr/bin/env python3
"""
LeRobot v3.0 to v2.1 Format Converter for Seeed REBOT-B601-DM Dataset
Converts a LeRobot v3.0 dataset to v2.1 format compatible with GR00T's
LeRobotEpisodeLoader.
Usage:
python convert_v3_to_v2.py \
--input /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/test \
--output /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/test_v2
The converter:
1. Reads episodes from meta/episodes/chunk-*/file-*.parquet
2. Splits data parquet into per-episode parquet files (v2.1 naming)
3. Extracts video clips per episode from v3.0 continuous MP4 files
4. Generates meta/modality.json, meta/tasks.jsonl, meta/episodes.jsonl
"""
import argparse
import json
import os
import shutil
import subprocess
from pathlib import Path
import pandas as pd
def _val(x):
"""Convert pyarrow/pandas scalar to native Python value."""
if hasattr(x, "item"):
return x.item()
elif hasattr(x, "tolist"):
return x.tolist()
return x
# ============================================================================
# 1. meta/modality.json
# ============================================================================
MODALITY_JSON = {
"video": {
"down_size": {
"type": "video",
"original_key": "observation.images.down_size"
},
"up_side": {
"type": "video",
"original_key": "observation.images.up_side"
}
},
"state": {
"single_arm": {
"start": 0,
"end": 6,
"original_key": "observation.state"
},
"gripper": {
"start": 6,
"end": 7,
"original_key": "observation.state"
}
},
"action": {
"single_arm": {
"start": 0,
"end": 6,
"original_key": "action"
},
"gripper": {
"start": 6,
"end": 7,
"original_key": "action"
}
},
"annotation": {
"language.language_instruction": {
"original_key": "task_index"
}
}
}
# ============================================================================
# 2. Convert tasks.parquet -> tasks.jsonl
# ============================================================================
def convert_tasks(input_dir: Path, output_dir: Path):
"""Convert tasks.parquet to tasks.jsonl."""
eps_dir = input_dir / "meta" / "episodes"
task_text = "unknown"
for chunk_dir in sorted(eps_dir.iterdir()):
if chunk_dir.is_dir():
for pf in sorted(chunk_dir.glob("*.parquet")):
df_eps = pd.read_parquet(pf, engine="pyarrow")
for _, row in df_eps.iterrows():
tasks_val = row.get("tasks", None)
if tasks_val is not None:
if hasattr(tasks_val, "tolist"):
tasks_val = tasks_val.tolist()
if isinstance(tasks_val, (list, tuple)) and len(tasks_val) > 0:
task_text = str(tasks_val[0])
break
if task_text != "unknown":
break
if task_text != "unknown":
break
tasks_path = input_dir / "meta" / "tasks.parquet"
df_tasks = pd.read_parquet(tasks_path, engine="pyarrow")
tasks = []
for _, row in df_tasks.iterrows():
ti_val = row["task_index"]
ti = int(ti_val.item()) if hasattr(ti_val, "item") else int(ti_val)
tasks.append({"task_index": ti, "task": task_text})
tasks_path_out = output_dir / "meta" / "tasks.jsonl"
with open(tasks_path_out, "w") as f:
for t in tasks:
f.write(json.dumps(t) + "\n")
print(f" Created tasks.jsonl ({len(tasks)} tasks)")
# ============================================================================
# 3. Convert episodes -> episodes.jsonl
# ============================================================================
def convert_episodes(input_dir: Path, output_dir: Path):
"""Convert episodes parquet files to episodes.jsonl."""
eps_dir = input_dir / "meta" / "episodes"
all_eps = []
for chunk_dir in sorted(eps_dir.iterdir()):
if chunk_dir.is_dir():
for pf in sorted(chunk_dir.glob("*.parquet")):
df = pd.read_parquet(pf, engine="pyarrow")
for _, row in df.iterrows():
def get(v):
val = row[v]
if hasattr(val, "tolist"):
val = val.tolist()
return val
tasks_val = get("tasks")
if isinstance(tasks_val, (list, tuple)) and len(tasks_val) > 0:
tasks_str = [str(tasks_val[0])]
else:
tasks_str = ["unknown"]
ep = {
"episode_index": int(get("episode_index")),
"length": int(get("length")),
"tasks": tasks_str,
}
all_eps.append(ep)
all_eps.sort(key=lambda x: x["episode_index"])
eps_path_out = output_dir / "meta" / "episodes.jsonl"
with open(eps_path_out, "w") as f:
for ep in all_eps:
f.write(json.dumps(ep) + "\n")
print(f" Created episodes.jsonl ({len(all_eps)} episodes)")
# ============================================================================
# 4. Split data parquet -> per-episode parquet files (v2.1 naming)
# ============================================================================
def convert_data_parquet(input_dir: Path, output_dir: Path):
"""
Split combined data parquet files into per-episode parquet files.
v3.0: data/chunk-000/file-000.parquet contains ALL episodes' data
v2.1: data/chunk-000/episode_000000.parquet (one per episode)
"""
data_dir = input_dir / "data"
output_data = output_dir / "data"
eps_dir = input_dir / "meta" / "episodes"
ep_data_map = {}
for chunk_dir in sorted(eps_dir.iterdir()):
if chunk_dir.is_dir():
for pf in sorted(chunk_dir.glob("*.parquet")):
df_eps = pd.read_parquet(pf, engine="pyarrow")
for _, erow in df_eps.iterrows():
ei = int(_val(erow["episode_index"]))
dci = int(_val(erow["data/chunk_index"]))
dfi = int(_val(erow["data/file_index"]))
ep_data_map[ei] = (dci, dfi)
chunk_files = {}
for chunk_dir in sorted(data_dir.iterdir()):
if not chunk_dir.is_dir():
continue
chunk_idx = int(chunk_dir.name.split("-")[1])
files = {}
for pf in sorted(chunk_dir.glob("*.parquet")):
file_idx = int(pf.stem.split("-")[1])
files[file_idx] = pf
chunk_files[chunk_idx] = files
for chunk_idx, files in sorted(chunk_files.items()):
output_chunk = output_data / f"chunk-{chunk_idx:03d}"
output_chunk.mkdir(parents=True, exist_ok=True)
ep_chunks = {}
for ep_idx, (dci, dfi) in sorted(ep_data_map.items()):
if dci == chunk_idx:
ep_chunks[ep_idx] = files[dfi]
for ep_idx, parquet_path in sorted(ep_chunks.items()):
df = pd.read_parquet(parquet_path, engine="pyarrow")
ep_rows = df[df["episode_index"] == ep_idx]
cols_to_keep = [c for c in ep_rows.columns if c in ("action", "observation.state", "task_index")]
ep_rows = ep_rows[cols_to_keep].reset_index(drop=True)
out_name = f"episode_{ep_idx:06d}.parquet"
out_path = output_chunk / out_name
ep_rows.to_parquet(out_path, engine="pyarrow", index=False)
total_eps = len(list(output_data.glob("chunk-*/episode_*.parquet")))
print(f" Converted data: {total_eps} episode parquet files")
# ============================================================================
# 5. Extract video clips per episode
# ============================================================================
def convert_videos(input_dir: Path, output_dir: Path):
"""
Extract per-episode video clips from v3.0 continuous MP4 files.
v3.0: videos/{cam}/chunk-{chunk:03d}/file-{file:03d}.mp4 (continuous, multi-episode)
v2.1: videos/{cam}/chunk-{chunk:03d}/episode_{ep:06d}.mp4 (one per episode)
"""
videos_dir = input_dir / "videos"
output_videos = output_dir / "videos"
camera_keys = [
"observation.images.down_size",
"observation.images.up_side",
]
eps_dir = input_dir / "meta" / "episodes"
ep_video_map = {}
for chunk_dir in sorted(eps_dir.iterdir()):
if chunk_dir.is_dir():
for pf in sorted(chunk_dir.glob("*.parquet")):
df_eps = pd.read_parquet(pf, engine="pyarrow")
for _, row in df_eps.iterrows():
ei = int(_val(row["episode_index"]))
ep_video_map[ei] = {}
for cam in camera_keys:
ep_video_map[ei][cam] = {
"chunk": int(_val(row[f"videos/{cam}/chunk_index"])),
"file": int(_val(row[f"videos/{cam}/file_index"])),
"from_ts": float(_val(row[f"videos/{cam}/from_timestamp"])),
"to_ts": float(_val(row[f"videos/{cam}/to_timestamp"])),
}
all_tasks = [(ep_idx, cam) for ep_idx, cam_data in sorted(ep_video_map.items()) for cam in camera_keys]
total = len(all_tasks)
done = 0
errors = 0
for ep_idx, cam in all_tasks:
vinfo = ep_video_map[ep_idx][cam]
src_name = f"file-{vinfo['file']:03d}.mp4"
src = videos_dir / cam / f"chunk-{vinfo['chunk']:03d}" / src_name
dest = output_videos / cam / f"chunk-{vinfo['chunk']:03d}" / f"episode_{ep_idx:06d}.mp4"
dest.parent.mkdir(parents=True, exist_ok=True)
if dest.exists():
done += 1
print(f"\r Extracting clips: {done}/{total} (errors: {errors})", end="", flush=True)
continue
duration = vinfo["to_ts"] - vinfo["from_ts"]
start = vinfo["from_ts"]
cmd = [
"ffmpeg", "-y",
"-ss", str(start),
"-i", str(src),
"-t", str(duration),
"-c:v", "libx264",
"-crf", "18",
"-preset", "fast",
"-an",
str(dest),
]
result = subprocess.run(cmd, capture_output=True, text=True)
done += 1
if result.returncode != 0:
errors += 1
print(f"\n ERROR ep{ep_idx} {cam}: {result.stderr[-300:]}")
print(f"\r Extracting clips: {done}/{total} (errors: {errors})", end="", flush=True)
print()
print(f" Extracted {total - errors} video clips ({len(ep_video_map)} episodes x {len(camera_keys)} cameras)")
# ============================================================================
# 6. Generate v2.1 info.json
# ============================================================================
def convert_info_json(input_dir: Path, output_dir: Path):
"""Update info.json for v2.1 format."""
info_path = input_dir / "meta" / "info.json"
with open(info_path) as f:
info = json.load(f)
info["data_path"] = "data/chunk-{episode_chunk:03d}/episode_{episode_index:06d}.parquet"
info["video_path"] = "videos/{video_key}/chunk-{episode_chunk:03d}/episode_{episode_index:06d}.mp4"
for key in ["data_files_size_in_mb", "video_files_size_in_mb", "splits"]:
info.pop(key, None)
info_path_out = output_dir / "meta" / "info.json"
with open(info_path_out, "w") as f:
json.dump(info, f, indent=2)
print(f" Created info.json")
# ============================================================================
# Main
# ============================================================================
def main():
parser = argparse.ArgumentParser(description="Convert LeRobot v3.0 dataset to v2.1 format")
parser.add_argument("--input", type=str, required=True, help="Input v3.0 dataset path")
parser.add_argument("--output", type=str, required=True, help="Output v2.1 dataset path")
args = parser.parse_args()
input_dir = Path(args.input)
output_dir = Path(args.output)
print(f"\nConverting LeRobot v3.0 -> v2.1")
print(f" Input: {input_dir}")
print(f" Output: {output_dir}")
(output_dir / "meta").mkdir(parents=True, exist_ok=True)
print("\n[1/6] Creating meta/modality.json...")
with open(output_dir / "meta" / "modality.json", "w") as f:
json.dump(MODALITY_JSON, f, indent=2)
print(" Created modality.json")
print("\n[2/6] Creating meta/tasks.jsonl...")
convert_tasks(input_dir, output_dir)
print("\n[3/6] Creating meta/episodes.jsonl...")
convert_episodes(input_dir, output_dir)
print("\n[4/6] Converting data parquet files...")
convert_data_parquet(input_dir, output_dir)
print("\n[5/6] Extracting video clips...")
convert_videos(input_dir, output_dir)
print("\n[6/6] Creating meta/info.json...")
convert_info_json(input_dir, output_dir)
print("\n[Done] Copying meta/stats.json...")
shutil.copy(input_dir / "meta" / "stats.json", output_dir / "meta" / "stats.json")
print(" Copied stats.json")
print(f"\nConversion complete: {output_dir}")
if __name__ == "__main__":
main()
运行转换脚本,例如:
python3 scripts/convert_v3_to_v2.py \
--input /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/test \
--output /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/test_v2
将模型导出为 TensorRT 引擎
在验证环境并准备好数据集之后,你可以将微调后的模型导出为 TensorRT 引擎,以在 Jetson Thor 上进行加速推理。
cd Isaac-GR00T/
source .venv/bin/activate
source scripts/activate_thor.sh
python3 scripts/deployment/build_trt_pipeline.py \
--model-path /path/to/your/finetuned_model \
--dataset-path /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/test_v2 \
--embodiment-tag NEW_EMBODIMENT \
--output-dir ./seeed_rebot_b601_dm_deployment \
--precision bf16 \
--batch-size 1 \
--steps export,build
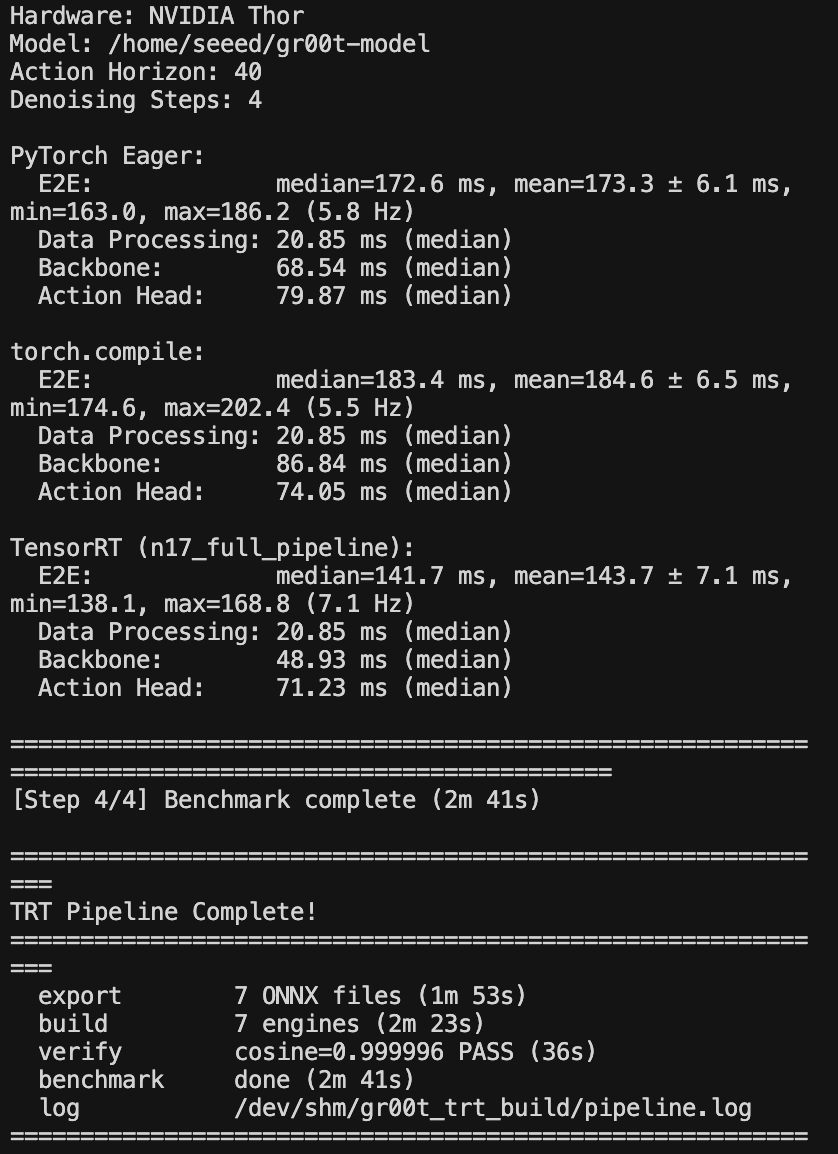
在等待过程中,你将会得到一个加速且优化后的引擎格式模型文件,以及中间转换得到的 ONNX 文件。
在 Jetson Thor 上进行推理
本章节说明如何在 Jetson 上使用已经通过 TensorRT 微调并加速的 GR00T N1.7 模型进行推理。
启动推理服务
使用以下脚本启动模型服务。我们对原始脚本做了少量修改,以支持 TensorRT 引擎模型的推理。
run_gr00t_server.py(点击展开)
# SPDX-FileCopyrightText: Copyright (c) 2026 NVIDIA CORPORATION & AFFILIATES. All rights reserved.
# SPDX-License-Identifier: Apache-2.0
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from dataclasses import dataclass
import importlib
import json
import os
from pathlib import Path
import sys
from gr00t.data.embodiment_tags import EmbodimentTag
from gr00t.data.types import ModalityConfig
from gr00t.policy.gr00t_policy import Gr00tPolicy
from gr00t.policy.replay_policy import ReplayPolicy
from gr00t.policy.server_client import PolicyServer
import tyro
DEFAULT_MODEL_SERVER_PORT = 5555
@dataclass
class ServerConfig:
"""Configuration for running the GR00T inference server."""
# Gr00t policy configs
model_path: str | None = None
"""Path to the model checkpoint directory"""
embodiment_tag: str = "new_embodiment"
"""Embodiment tag (name or value, case-insensitive). Run with --help to see known tags."""
device: str = "cuda"
"""Device to run the model on"""
# Replay policy configs
dataset_path: str | None = None
"""Path to the dataset for replay trajectory"""
modality_config_path: str | None = None
"""Path to the modality configuration file"""
execution_horizon: int | None = None
"""Policy execution horizon during inference. Required when --dataset-path is set (ReplayPolicy)."""
# Server configs
host: str = "0.0.0.0"
"""Host address for the server"""
port: int = DEFAULT_MODEL_SERVER_PORT
"""Port number for the server"""
strict: bool = True
"""Whether to enforce strict input and output validation"""
use_sim_policy_wrapper: bool = False
"""Whether to use the sim policy wrapper"""
# TensorRT inference configs
trt_engine_path: str = ""
"""Path to directory containing TensorRT engine files. If set, uses TRT inference instead of PyTorch."""
trt_mode: str = "n17_full_pipeline"
"""TRT mode: 'n17_full_pipeline', 'vit_llm_only', 'action_head', or 'dit_only'."""
def main(config: ServerConfig):
config.embodiment_tag = EmbodimentTag.resolve(config.embodiment_tag)
print("Starting GR00T inference server...")
print(f" Embodiment tag: {config.embodiment_tag}")
print(f" Model path: {config.model_path}")
print(f" Device: {config.device}")
print(f" Host: {config.host}")
print(f" Port: {config.port}")
if config.trt_engine_path:
print(f" TRT engines: {config.trt_engine_path}")
print(f" TRT mode: {config.trt_mode}")
# Create and start the server
if config.model_path is not None:
if config.model_path.startswith("/") and not os.path.exists(config.model_path):
raise FileNotFoundError(f"Model path {config.model_path} does not exist")
policy = Gr00tPolicy(
embodiment_tag=config.embodiment_tag,
model_path=config.model_path,
device=config.device,
strict=config.strict,
)
# Replace PyTorch modules with TensorRT engines if requested
if config.trt_engine_path:
deploy_dir = str(Path(__file__).resolve().parents[2] / "scripts" / "deployment")
if deploy_dir not in sys.path:
sys.path.insert(0, deploy_dir)
from trt_model_forward import setup_tensorrt_engines
setup_tensorrt_engines(policy, config.trt_engine_path, mode=config.trt_mode)
print(f" TensorRT engines loaded in '{config.trt_mode}' mode")
elif config.dataset_path is not None:
if config.execution_horizon is None:
raise ValueError(
"--execution-horizon is required when --dataset-path is set "
"(ReplayPolicy needs a positive integer to advance episodes)."
)
if config.execution_horizon <= 0:
raise ValueError(
f"--execution-horizon must be positive; got {config.execution_horizon}."
)
modality_configs: dict[str, ModalityConfig] | None = None
if config.modality_config_path is not None:
config_path = Path(config.modality_config_path)
if config_path.suffix == ".py":
sys.path.append(str(config_path.parent))
importlib.import_module(config_path.stem)
print(f"Loaded modality config: {config_path}")
elif config_path.suffix == ".json":
with open(config.modality_config_path, "r") as f:
raw = json.load(f)
modality_configs = {k: ModalityConfig(**v) for k, v in raw.items()}
else:
raise ValueError(
f"Unsupported modality config format: {config_path.suffix}. Use .py or .json"
)
if modality_configs is None:
from gr00t.configs.data.embodiment_configs import MODALITY_CONFIGS
modality_configs = MODALITY_CONFIGS.get(config.embodiment_tag.value)
if modality_configs is None:
raise ValueError(
f"No built-in modality config for embodiment tag "
f"'{config.embodiment_tag.name}' (value='{config.embodiment_tag.value}'). "
f"Available tags: {sorted(MODALITY_CONFIGS.keys())}. "
f"Please provide --modality-config-path (JSON or .py) "
f"when using this tag with ReplayPolicy."
)
policy = ReplayPolicy(
dataset_path=config.dataset_path,
modality_configs=modality_configs,
execution_horizon=config.execution_horizon,
strict=config.strict,
)
else:
raise ValueError("Either model_path or dataset_path must be provided")
# Apply sim policy wrapper if needed
if config.use_sim_policy_wrapper:
from gr00t.policy.gr00t_policy import Gr00tSimPolicyWrapper
policy = Gr00tSimPolicyWrapper(policy)
server = PolicyServer(
policy=policy,
host=config.host,
port=config.port,
)
print(f"\n✓ Server ready — listening on {config.host}:{config.port}\n")
try:
server.run()
except KeyboardInterrupt:
print("\nShutting down server...")
if __name__ == "__main__":
config = tyro.cli(ServerConfig)
main(config)
使用 TensorRT 引擎运行推理服务器:
python gr00t/eval/run_gr00t_server.py \
--model-path /home/seeed/checkpoint-10000/ \
--embodiment-tag NEW_EMBODIMENT \
--trt-engine-path /dev/shm/gr00t_trt_build/engines \
--trt-mode n17_full_pipeline
请确保将模型路径替换为你自己的微调模型 checkpoint 路径。
真实机器人执行
这里使用 LeRobot 环境来启动机械臂并执行任务。
cd /path/to/lerobot
source .venv/bin/activate
cd Isaac-GR00T/gr00t/eval/real_robot
git clone https://github.com/zibochen6/rebot-arm-dm.git
uv pip install -e .
uv pip install --no-deps -e ../../../../
启动机械臂:
python eval_rebot_arm_dm.py \
--robot.type=seeed_b601_dm_follower \
--robot.id=b601_dm_follower \
--robot.port=/dev/ttyACM0 \
--robot.can_adapter=damiao \
--robot.cameras='{ front: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30}, side: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30}}' \
--policy_host=localhost \
--policy_port=5555 \
--lang_instruction="Grab markers and place into pen holder." \
--action_smoothing_alpha=0.05 \
--action_smoothing_max_delta=20.0 \
--action_smoothing_gripper_alpha=0.1
首次执行时可能会报告找不到机械臂标定文件的错误。这是因为使用 LeRobot 验证 reBot Arm 时生成的标定文件名为 follower1.json,而程序正在查找的是 b601_dm_follower.json。重命名标定文件即可解决该问题:
mv ~/.cache/huggingface/lerobot/calibration/robots/seeed_b601_dm_follower/follower1.json \
~/.cache/huggingface/lerobot/calibration/robots/seeed_b601_dm_follower/b601_dm_follower.json
参考资料
- 🔗 https://developer.nvidia.com/embedded/jetpack
- 🔗 https://github.com/NVIDIA/Isaac-GR00T/tree/main
- 🔗 https://huggingface.co/nvidia/GR00T-N1.7-LIBERO
技术支持与产品讨论
感谢您选择我们的产品!我们将为您提供多种支持,确保您在使用我们产品的过程中尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。