MeshCore Remote Terminal 入门指南
本教程将介绍 Remote Terminal for MeshCore(RemoteTerm),为 MeshCore 设备提供传输消息的接口。本文将演示在 Raspberry Pi 上运行 RemoteTerm 的基础配置,使用 Seeed XIAO ESP32S3 & SX1262 Kit 作为配套射频模块,以及 Raspberry Pi Zero 2W 打造一套紧凑的一体化 MeshCore 解决方案,适合高级用户使用!
RemoteTerm 简介
RemoteTerm 是一个开源应用程序,运行在连接了 MeshCore 设备的服务器上。
它为本地 MeshCore 网络提供接口,使同一局域网中的任何设备(即使离网运行)都可以通过无线电发送和接收消息。RemoteTerm 对移动端非常友好,并提供以下扩展能力:
- 缓存所有接收到的数据包
- 运行多个 Python 机器人
- 监控无限数量的联系人和频道
- 通过网络或 VPN 远程访问你的无线电
- 将数据包转发到 MQTT、SQS、Apprise 等
- 可视化网状节点地图
安装与准备
硬件
| XIAO ESP32S3 & Wio-SX1262 Kit | Raspberry Pi Zero 2W |
|---|---|
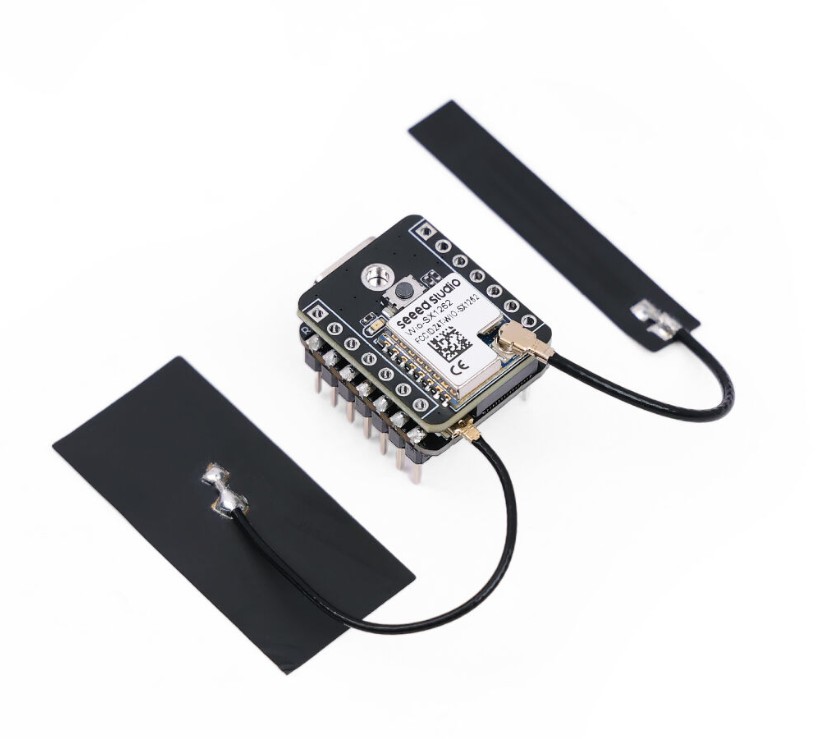 | 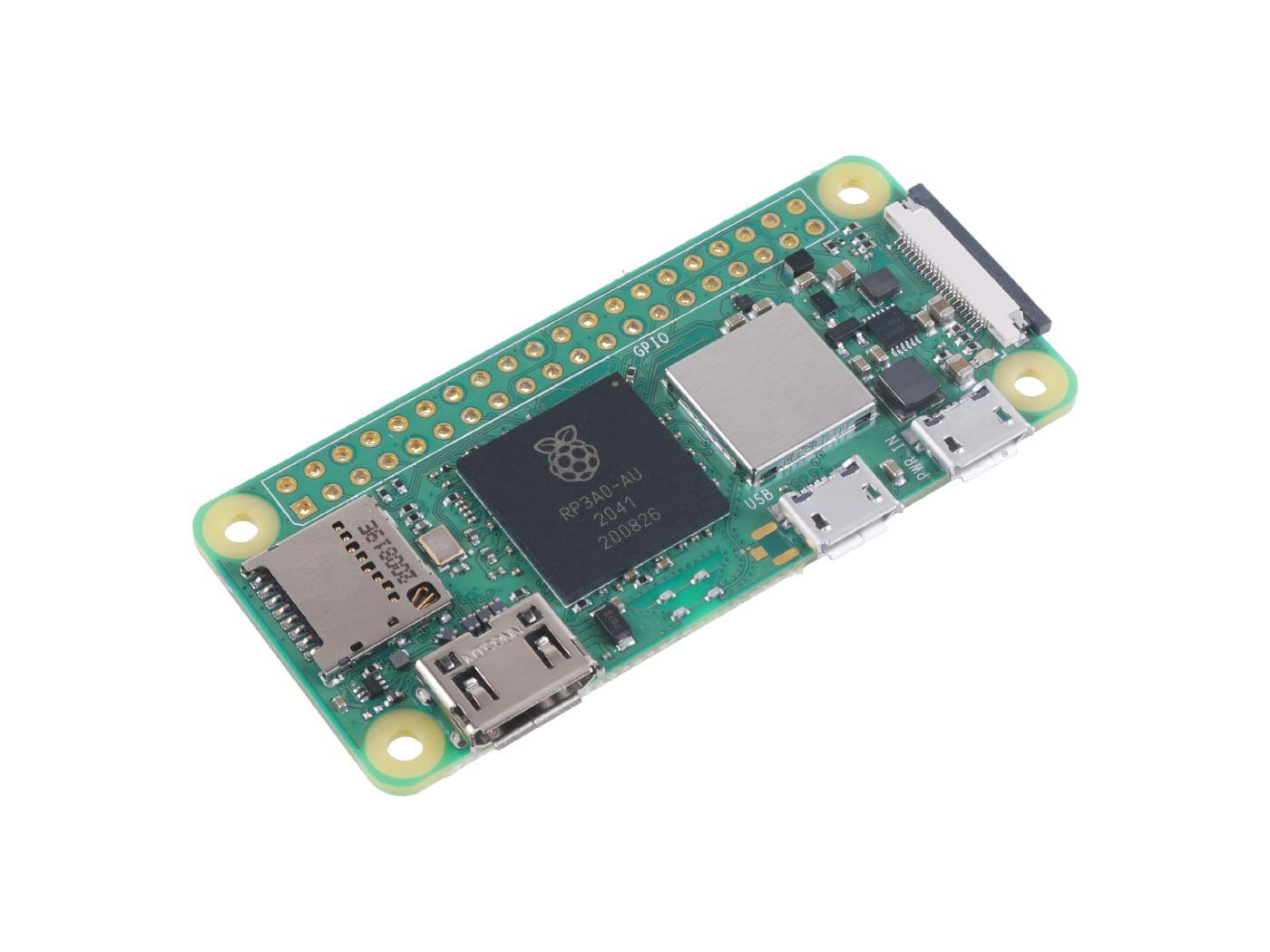 |
除了主要硬件外,还需要以下配件:
- 16GB 或更大容量的 MicroSD 卡
- USB Micro 转 USB-C 线缆(用于连接射频模块)
- USB Micro 转 USB-A 或 USB-C 线缆(用于为 Raspberry Pi 供电)
- 为 Raspberry Pi 提供稳定电源(推荐 5V 2.5A)
射频模块设置
- 使用 B2B 连接器将 Seeed XIAO ESP32S3 开发板 与 SX1262 模组连接在一起。
- 将 LoRa 天线连接到 SX1262。
- 插入电脑,并通过 web flasher 将固件烧录为 "Seeed Studio Xiao S3 WIO"(Serial Companion)。
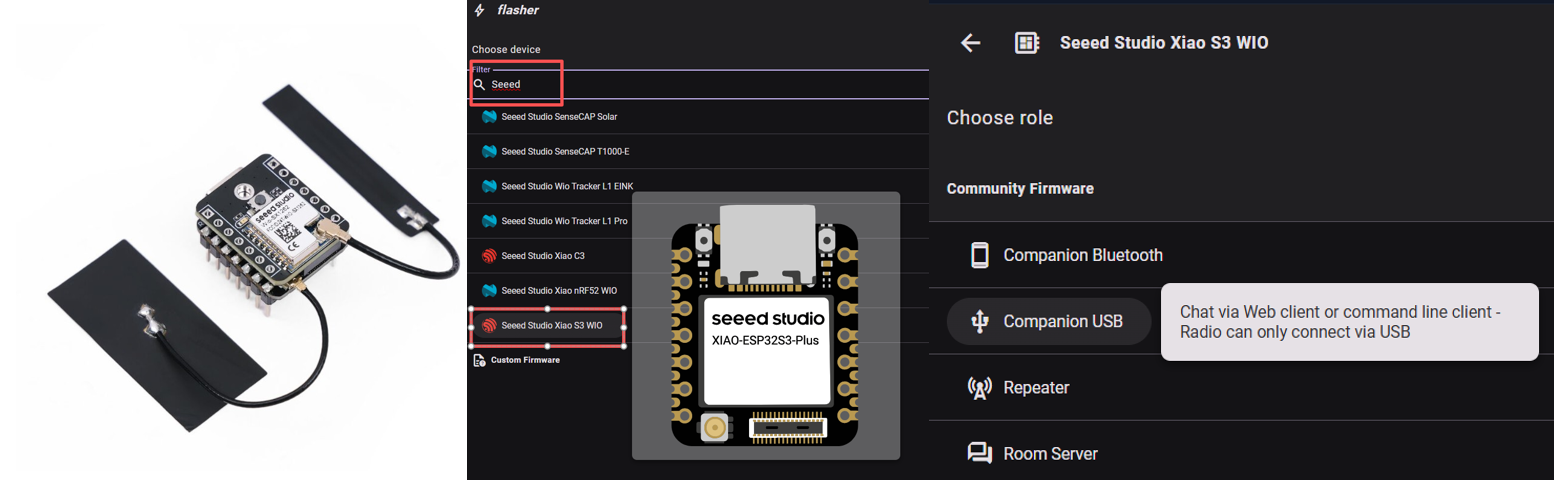
本教程指导你设置串口 companion。RemoteTerm 也支持 TCP 和 Bluetooth companion,但配置会稍微复杂一些。
Pi 设置
- 点击这里 下载 Raspberry Pi Imager
- 打开 Imager,选择你的 Raspberry Pi 型号,并选择 "Raspberry Pi OS Lite (64 bit)"
- 配置 SSH(使用密码或密钥),并配置 Wi-Fi 连接
- 将 ESP32 MeshCore 连接到 Raspberry Pi
请确保 ESP32 LoRa Mesh 节点连接到 USB 接口,而不是 POWER 接口
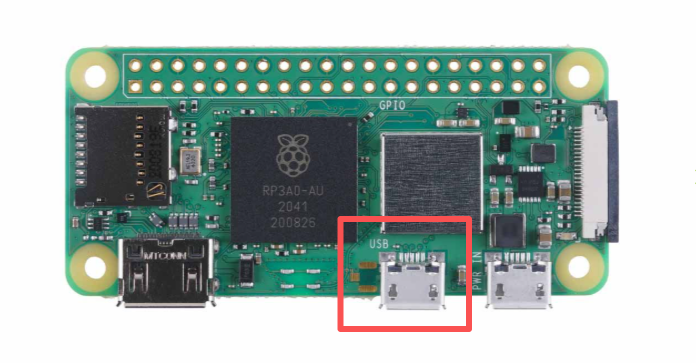
完整安装(带直角转接头)可能如下所示:
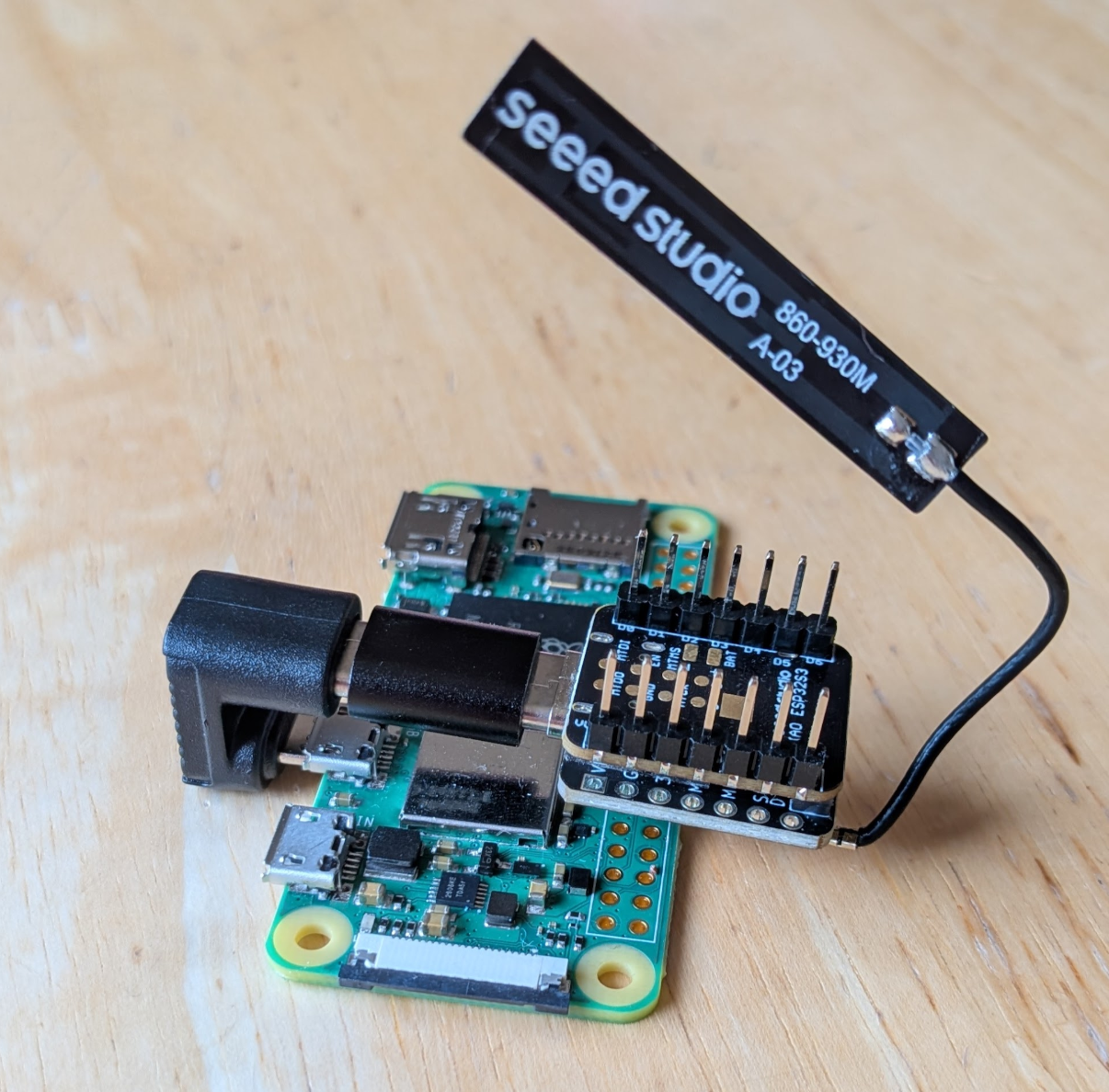
- 将电源连接到 Pi 的
POWER接口 - 使用家用路由器的管理界面查看分配给 Raspberry Pi 的地址。建议为其分配 DHCP 保留地址,以避免 IP 地址变化。
Pi 配置
- 通过 SSH 连接到 Raspberry Pi
- 确认射频设备已识别。
find /dev/serial/by-id -maxdepth 1 -type l -print | sort应该会显示类似/dev/serial/by-id/usb-Espressif_USB_JTAG_serial_debug_unit_XX:XX:XX:XX:XX:XX-if00的条目 - 更新与升级系统
sudo apt update # update package repositories
sudo apt upgrade -y # upgrade packages
sudo apt-get install -y git # install git
curl -fsSL https://get.docker.com | sh # install docker - 克隆并启动
git clone https://github.com/jkingsman/Remote-Terminal-for-MeshCore.git
cd Remote-Terminal-for-MeshCore/
# configure the docker setup
./scripts/setup/install_docker.sh
配置选项讲解
启动服务器
配置
在你通过安装脚本配置好 dockerfile 之后,运行
sudo docker compose up -d
以启动服务器。以下命令也可能会有帮助:
sudo docker compose up -d # start RemoteTerm in the background
sudo docker compose logs -f # follow the container logs live
sudo docker compose down # stop and remove the running container
sudo docker compose restart # restart the container without changing the image
sudo docker compose pull && sudo docker compose up -d # upgrade to the latest published image and restart
RemoteTerm 会对无线电进行完整管理,这意味着一旦无线电连接到 RemoteTerm,所有联系人/频道都会被导入并交由 RemoteTerm 管理,而实际同步到设备上的联系人将由 RemoteTerm 控制。
热点配置(可选)
此步骤为可选,仅推荐用于将远离家庭环境使用的无线电设备。该配置会让无线电断开家庭 Wi-Fi 连接,但会让其开始广播自己的 Wi-Fi,从而在没有互联网连接时也能访问。
-
设置热点
sudo nmcli device wifi hotspot ssid <hotspot name> password <hotspot password> ifname wlan0 -
你很可能需要连接到新的 Wi-Fi 网络并再次通过 SSH 登录 Pi。连接到新网络后,在 Wi-Fi 配置中,“默认网关” 即为你的 Pi 的 URL。
-
配置热点在开机时自动广播
nmcli connection
# grab the UUID of the Hotspot connection
sudo nmcli connection modify <hotspot UUID> connection.autoconnect yes connection.autoconnect-priority 100
RemoteTerm 使用入门
主界面
RemoteTerm 主界面会显示已知频道、中继和房间服务器的列表,顶部预留了收藏夹区域。点击任意联系人或频道即可开始消息收发,点击中继则可以登录并查看管理界面。你可以通过顶部的绿色按钮添加频道或联系人。
在联系人列表上方有一组工具:
| General Item | Function |
|---|---|
| Packet Feed | 显示接收时到达的原始数据包 |
| Node Map | 可视化节点位置 |
| Mesh Visualizer | 以可自定义的 3D 形式实时展示节点和流量 |
| Trace | 在中继之间运行多跳追踪,以获取信号强度信息 |
| Message Search | 在频道和消息历史中搜索单词或短语 |
| Channel Finder | 频道查找器,用于为已接收但未解密的数据包查找频道名称 |
消息收发(频道)
要创建或加入频道,请点击应用主菜单左上角的 “Add Channel/Contact” 按钮。仅通过密钥标识的私有频道,或通过名称以 #hashtag 标识的 Hashtag 频道,都可以在弹出的菜单中加入。
Public 频道会自动添加到所有新的 RemoteTerm 实例中。你的本地 Mesh 通常会有一些活跃频道:Public、#test 或 #testing,以及 #bots 或 #bot 都是不错的起点,也方便你找到能引导新手进入本地优质房间的用户。
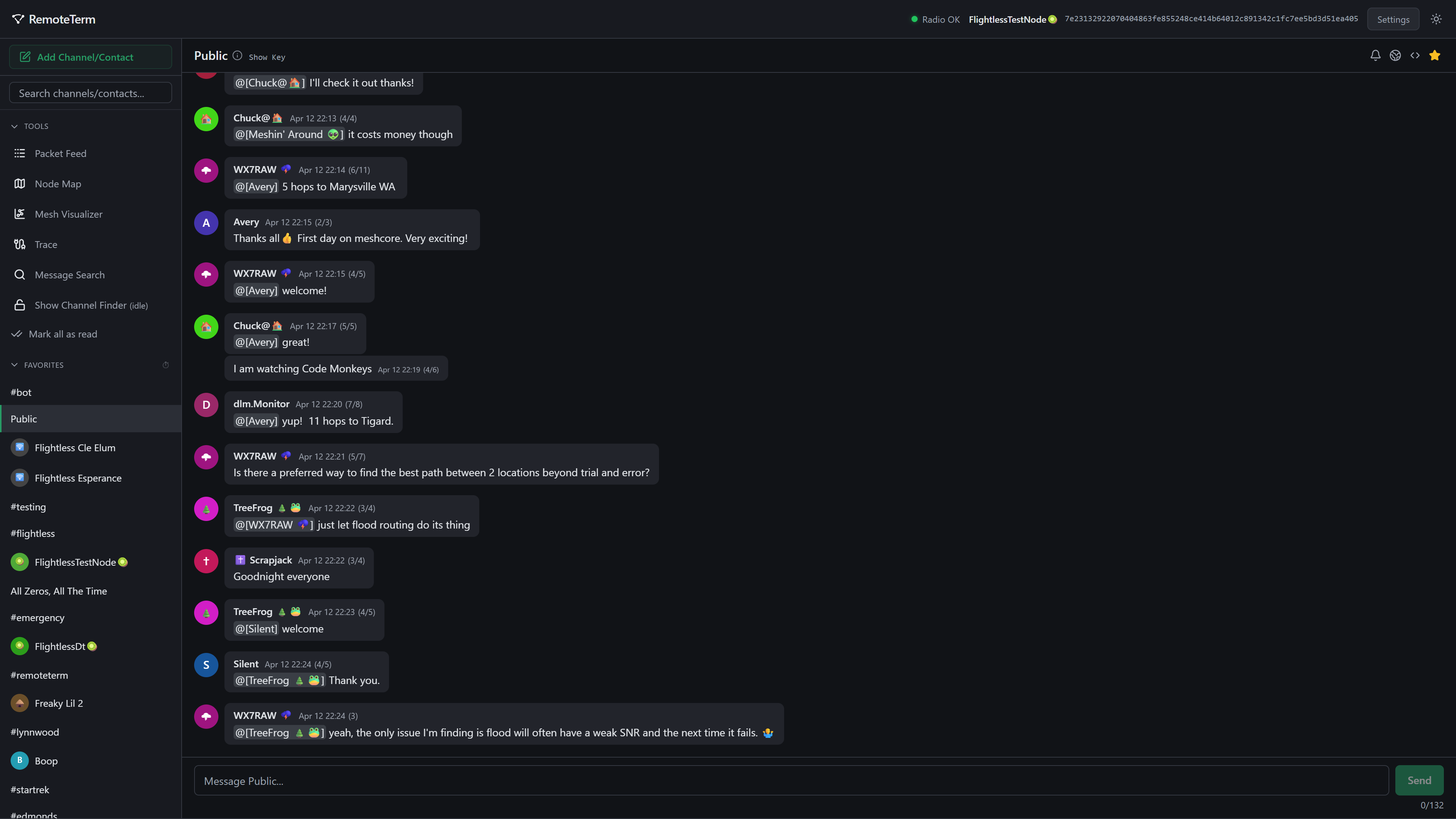
当选中某个频道时,界面大致如下所示:

在状态栏中:
| Icon | Function |
|---|---|
 | 配置通知方式,可以是桌面通知(需要浏览器保持打开)或 Web Push(即使浏览器关闭也能接收)。这些功能需要受信任的 HTTPS 环境(安装程序提供的 snakeoil 证书是否足以启用通知,取决于你的操作系统和浏览器) |
 | 启用区域路由覆盖,仅在此频道中限制无线电发送消息的区域范围。具有相同或不同区域设置的用户将分别能够看到或自动忽略你的消息 |
| 允许为每个频道单独设置跳数宽度,与无线电的默认设置相互独立 | |
 | 将频道添加到收藏夹或从收藏夹中移除 |
 | 删除频道,但如果你之后重新添加该频道,历史消息仍会保留 |
| Room Key | 提供当前房间对应的 MeshCore 密钥 |
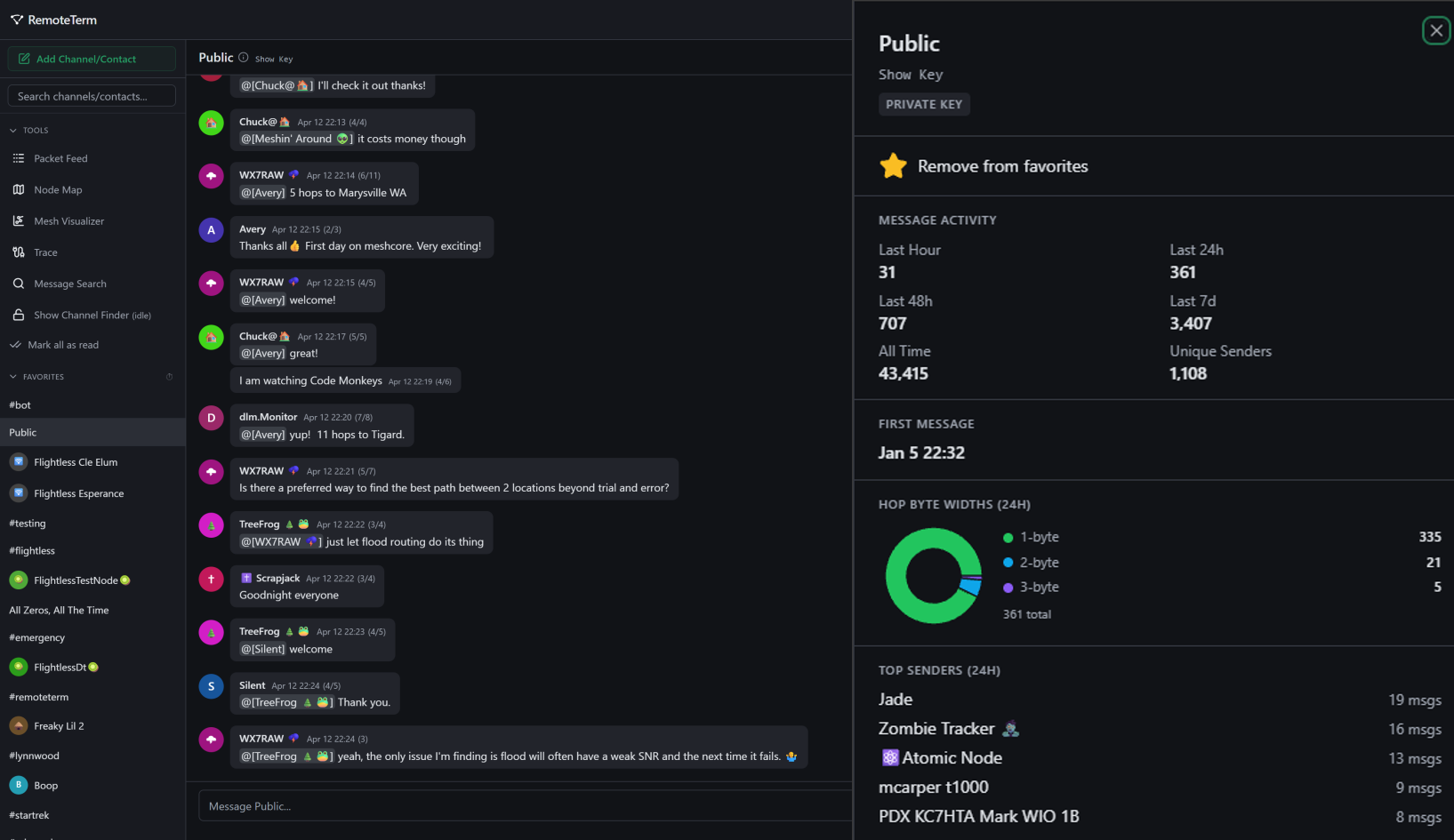
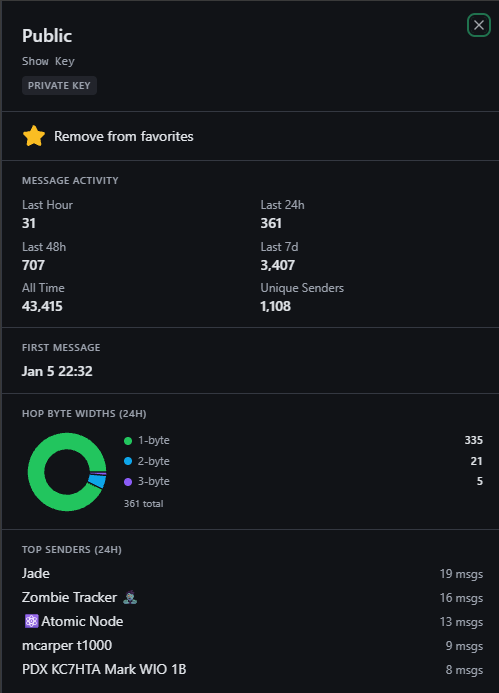
在左上角是带有信息图标的频道名称;你可以点击它来查看有关该频道的信息,例如它的活跃程度、谁在发送消息以及它的密钥(你也可以通过点击顶部状态栏中的 "Show key" 文本来查看密钥):
消息(私信)
发送私信与频道消息的工作方式类似,但有一些不同的选项。
| 图标 | 功能 |
|---|---|
 | 向联系人发送路由探测,以发现更理想的消息路由路径 |
 | 向联系人发送直接跟踪,包含远端和本地的 SNR 数据 |
| 配置通知,可以是桌面通知(需要浏览器保持打开)或 Web Push(即使浏览器关闭也能投递)。这些需要受信任的 HTTPS 环境(安装程序提供的 snakeoil 证书是否足以允许通知,取决于你的操作系统和浏览器) |
| 将联系人添加到收藏或从收藏中移除 |
| 删除会话,但如果你之后选择重新添加,将保留历史消息 |
| 联系人密钥 | 提供给定联系人的 MeshCore 密钥,以及他们上次被听到的时间(广播、消息等)和方式(直接,或数据包经过的路径) |
与频道类似,你可以点击所选联系人的顶部栏中的信息图标或名称来查看该联系人的分析数据。
MQTT 与自动化
RemoteTerm 在为自动化系统提供丰富集成方面表现出色。集成会在听到某些类型的数据包时执行操作(例如,当在频道中发送消息或收到私信时)。这些包括:
- MQTT,通过 MQTT 转发数据包到:
- 私有代理
- 社区聚合器
- Home Assistant
- Webhooks,将带有消息数据的 GET 或 POST 请求发送到特定 URL
- Apprise,一种灵活的通知扇出工具,可以转发到 Discord、Telegram、短信、电子邮件等
- 将数据包或消息排队到 Amazon SQS 队列中
- Python 机器人
为社区 Mesh 地图进行设置
显示 MeshCore 节点位置、消息流动模式和连接中断情况等,有助于社区构建 MeshCore 网络。为了提供这种调试视图,社区聚合器会从观察者那里摄取原始数据包流。
RemoteTerm 让你可以轻松地使用同一台用于收发消息的无线电,作为观察者节点参与这些社区映射和可视化工作。
MeshCore 不允许消息通过 MQTT 节点进入 mesh;社区可观测性工作是只读的。
有许多社区观察者平台,但 LetsMesh 是其中较为流行的一个,我们将以它为例进行设置。
- 点击这里访问 LetsMesh,登录 LetsMesh 分析器。
- 在 RemoteTerm 中,进入 "Settings",然后点击 "MQTT & Automation"。
- 点击 "Add Integration",并从左侧列表中选择 "LetsMesh (US)"。
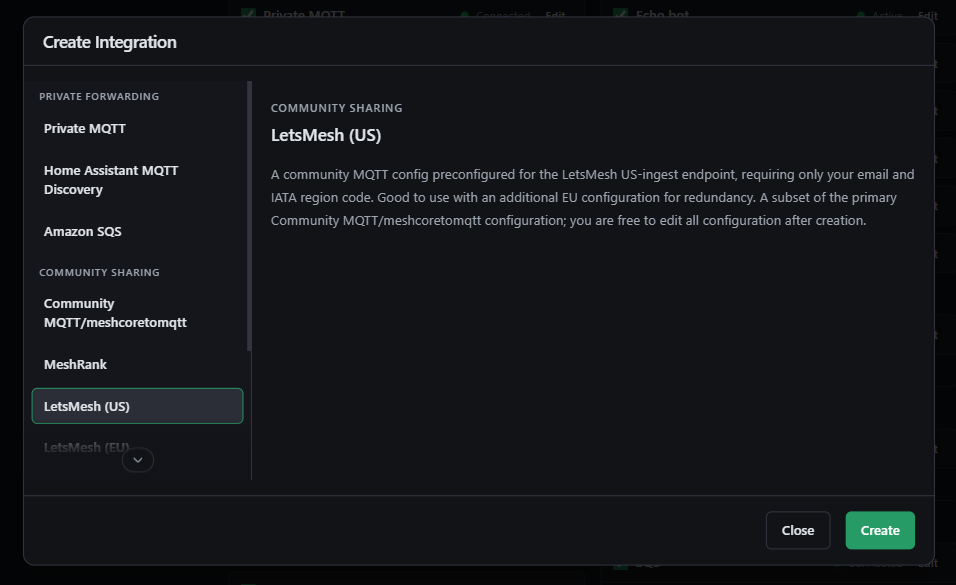
- 点击 "Create"。
- 填写你用于注册 LetsMesh 的相同电子邮件地址,并输入最近机场的 IATA 代码。
- 点击 "Save as Enabled"。
你应该会看到一个绿色圆点和 "Connected" 状态;一个健康的集成应如下所示:
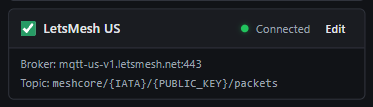
如果你看到的是琥珀色圆点,请点击 Edit 按钮旁边的 "ⓘ" 符号查看错误信息。
现在,访问这个链接。大约 15 分钟内,你应该会看到你的无线电在那边显示为绿色,你自己的遥测和数据包会被转发到 LetsMesh!
机器人
RemoteTerm 提供了一个接口,用于编写你自己的机器人。机器人由简单的 Python 代码组成,每当从联系人或频道收到消息时就会运行。
机器人会在响应其他消息时生成自动流量。这意味着你有责任确保机器人被谨慎编写,以防止淹没 mesh 或产生无限循环。
设置一个简单的掷骰子机器人
下面是一个教程,引导你构建一个具有简单掷骰功能的机器人,以标准形式请求(例如,“3d6”表示掷 3 个六面骰)。步骤如下:
- 在 RemoteTerm 中,进入 "Settings",然后点击 "MQTT & Automation"。
- 点击 "Add Integration",并从左侧列表中选择 "Python Bot"。
- 点击 "Create"。
- 给机器人起一个有描述性的名字,例如 "Dice Bot"。
- 清空编辑器中的代码,并粘贴以下代码:
import random
import re
def bot(**kwargs) -> str | list[str] | None:
"""Dice roller — responds to !dice NdS in #bot only."""
sender_name = kwargs.get("sender_name")
message_text = kwargs.get("message_text", "")
channel_name = kwargs.get("channel_name")
is_outgoing = kwargs.get("is_outgoing", False)
if is_outgoing or channel_name != "#bot":
return None
match = re.match(r"^!dice\s+(\d+)d(\d+)$", message_text.strip())
if not match:
return None
count, sides = int(match.group(1)), int(match.group(2))
if count < 1 or count > 20 or sides < 2 or sides > 100:
return "I don't know how to roll that! [1-20]d[2-100]"
rolls = [random.randint(1, sides) for _ in range(count)]
parts = " + ".join(str(r) for r in rolls)
name = sender_name or "Someone"
return f"@[{name}] rolled {parts} = {sum(rolls)}"
- 点击 "Save as Enabled"。
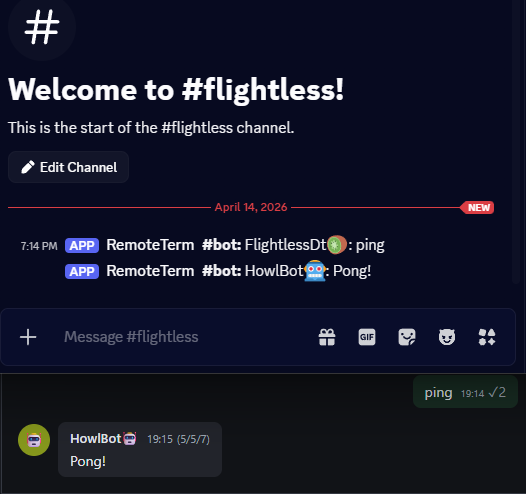
使用另一台无线电,进入 #bot 房间并请求一次掷骰(例如 "3d6")。输出应类似如下:
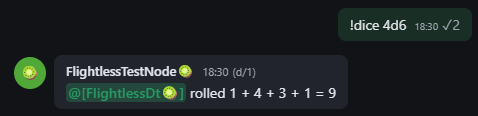
如果你没有看到预期的响应,可以从 Docker 容器中查看服务器日志,以确认在执行 Python 代码时是否报告了错误。
设置一个路径宽度机器人
MeshCore 固件 v1.14+ 对消息如何穿越 mesh 带来了重大变化;穿越兼容路由器的数据包现在可以携带多字节跳数标识符。
我们可以编写一个机器人,帮助人们确定他们的消息是否关联了多字节路径。该脚本通过提供一个跳数宽度消息以及数据包跳数数据本身,利用了在响应中发送多条消息的能力。
def bot(**kwargs) -> str | list[str] | None:
"""Report the sender's path hop width in #bot."""
sender_name = kwargs.get("sender_name")
message_text = kwargs.get("message_text", "")
channel_name = kwargs.get("channel_name")
is_outgoing = kwargs.get("is_outgoing", False)
path = kwargs.get("path")
path_bytes_per_hop = kwargs.get("path_bytes_per_hop")
if is_outgoing or channel_name != "#bot":
return None
if "!hopwidth" not in message_text.lower():
return None
name = sender_name or "Someone"
if path_bytes_per_hop is None or not path:
return f"@[{name}]'s hop width is unknown (no path data)"
hop_count = (len(path) // 2) // path_bytes_per_hop
if path_bytes_per_hop == 1:
msg = f"@[{name}]'s hops are 1 byte wide; they might not be on 1.14+ or there may be incompatible repeaters in the path."
else:
msg = f"@[{name}]'s hops are {path_bytes_per_hop} bytes wide; they are using firmware v1.14+!"
return [msg, f"Heard via {hop_count} hop{'s' if hop_count != 1 else ''}"]
将 MeshCore 频道消息转发到 Discord
Apprise 是 RemoteTerm 支持的一种灵活通知服务。Apprise 允许你选择一个或多个上百种通知服务,将频道或私信发送到这些服务,从 Discord 到 Telegram、短信、电子邮件等。

作为示例,我们将使用 Apprise,通过 RemoteTerm 将某个 MeshCore 频道中的所有消息转发到 Discord。
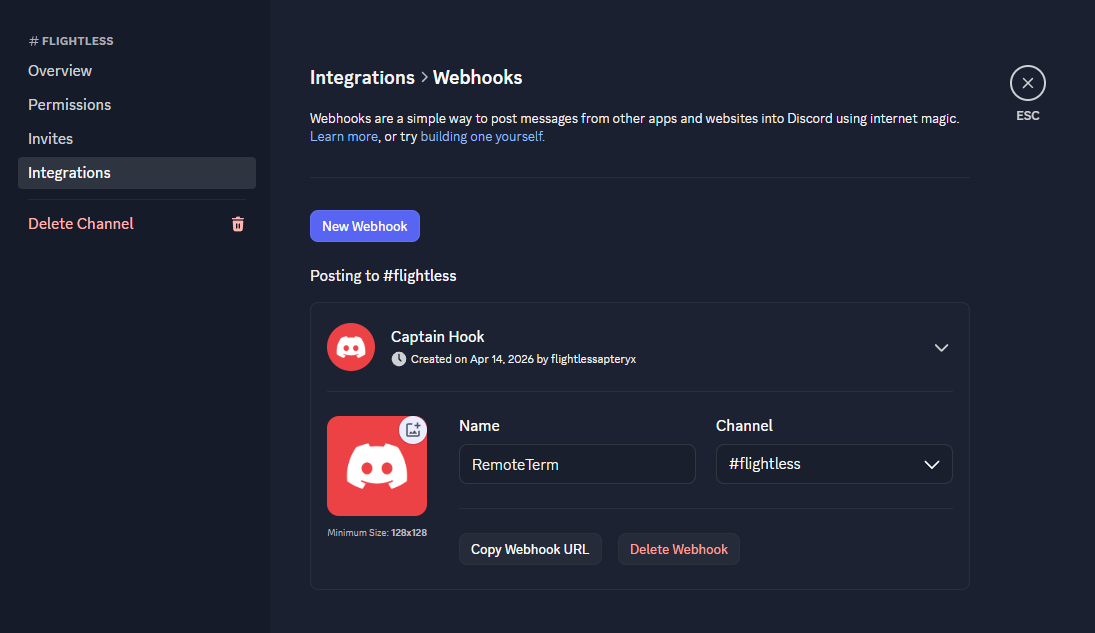
- 打开 Discord,进入一个你拥有管理员权限的频道。
- 右键点击频道名称并选择 "Edit Channel"。
- 在左侧菜单中点击 "Integrations",然后点击 "Create Webhook"。
- 为 webhook 取一个合适的名称,并复制 webhook URL。webhook 的形式应为
https://discord.com/api/webhooks/<WebhookID>/<WebhookToken>
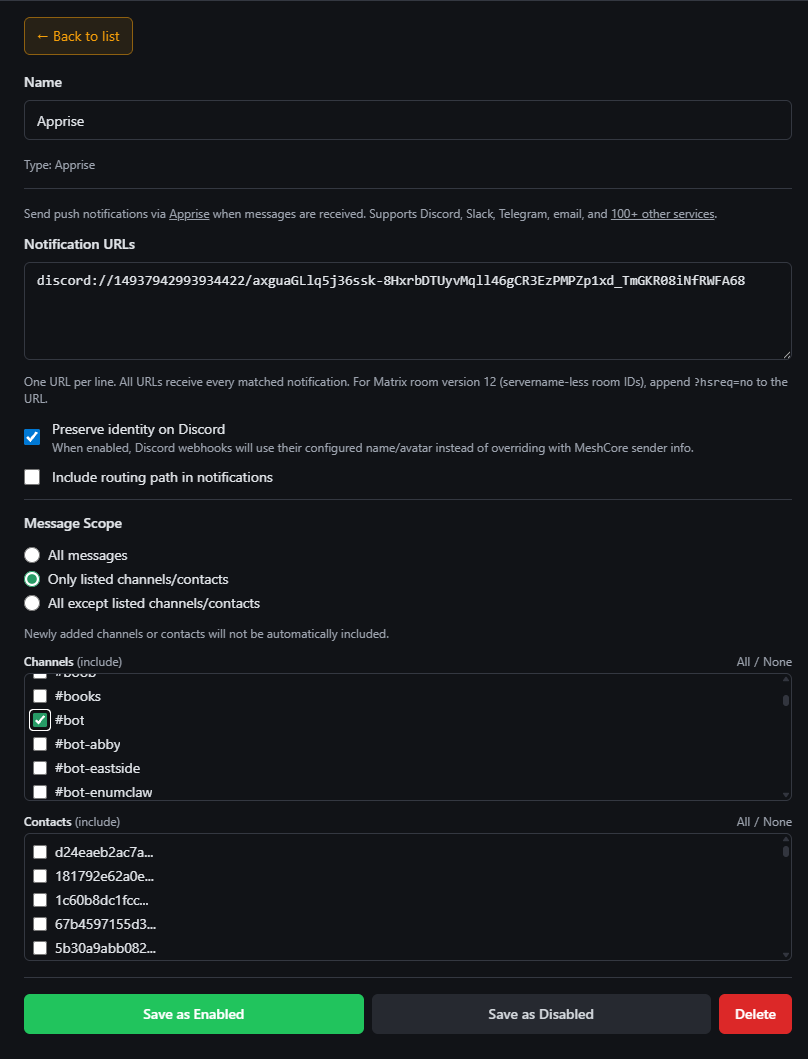
- 在 RemoteTerm 中,进入 "Settings",然后点击 "MQTT & Automation"。
- 点击 "Add Integration",然后在左侧列表中选择 "Apprise"。
- 点击 "Create"。
- 在输入框中添加通知 URL。根据 Apprise 的 Discord 文档,其格式应为
discord://{WebhookID}/{WebhookToken}/。使用从复制的 URL 中获得的 WebhookID 和 WebhookToken。 - 选择是否在可用时使用用户配置的名称和头像来保留用户身份。
- 选择是否在消息中包含路由路径数据(建议禁用)。
- 选择你希望转发到 Discord 的联系人/频道,并点击 "Save as Enabled"。
启用后,你应该会看到消息开始流动!如果遇到问题或没有看到预期的消息,请检查服务器日志中是否有任何错误报告,或者尝试启用所有频道,以确保至少 RemoteTerm ↔ Discord 的连接是正常工作的。
将 RemoteTerm 集成到 Home Assistant
Home Assistant 提供了一个简单易用且功能强大的家庭自动化框架。RemoteTerm 通过内置的 MQTT 集成与 Home Assistant 进行集成。通过该集成,你可以基于消息触发自动化、监控中继和本地无线电遥测,并通过广告中的 GPS 跟踪联系人。
为了利用中继遥测跟踪功能,你需要将目标中继加入自动遥测获取中。一旦加入,RemoteTerm 将按可配置的时间间隔请求遥测数据,保留历史数值,并在 Home Assistant 中显示最新的数值。
自动中继遥测获取具有可自定义的时间间隔;你可以选择从每小时一次到每天一次的频率,但限制是在 24 小时内自动获取次数不得超过 24 次。
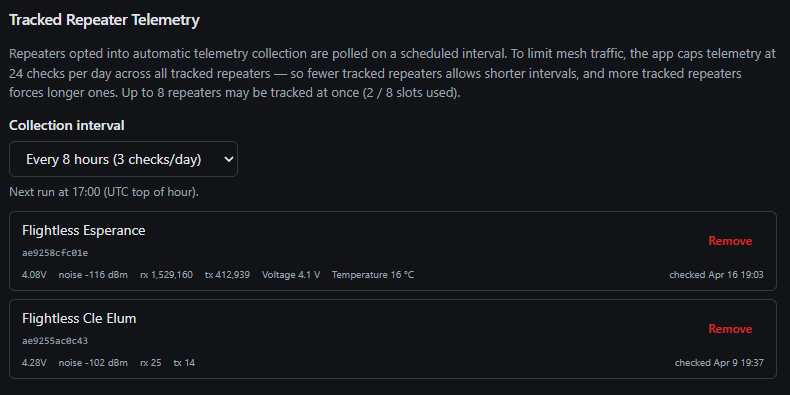
在你按需配置好要跟踪的中继并在 Home Assistant 中启用 MQTT Discovery 之后,你就可以在 RemoteTerm 中配置一个集成来启动数据流。
- 在 RemoteTerm 中,进入 "Settings",然后点击 "MQTT & Automation"。
- 点击 "Add Integration",然后在左侧列表中选择 "Home Assistant MQTT Discovery"。
- 点击 "Create"。
- 输入你的 MQTT broker 信息,包括主机和端口,以及用户名/密码/TLS 配置(如果适用)。
- 选择要在 Home Assistant 中通过广告 GPS 位置进行跟踪的联系人。
- 选择你希望在 Home Assistant 中查看的、已启用遥测跟踪的中继。
- 为 Home Assistant 中的触发器选择消息范围。
- 点击 "Save as Enabled"。
请注意,RemoteTerm 集成配置界面在下拉菜单 "What gets created in Home Assistant" 和 "Published Topic Summary" 中提供了精确创建的主题/实体信息。
被跟踪的联系人和中继会在 Home Assistant 中创建实体;你可能希望将选择限制为你真正关心的联系人,以避免在 Home Assistant 中造成混乱。
消息事件不会创建实体,仅用于触发器;通常允许所有消息流向 Home Assistant 不会有问题。
要查看新实体,请登录到你的 Home Assistant Web 界面。点击 Settings,然后点击 Devices & Services,再点击 MQTT。你应该会看到显示出的被跟踪实体。
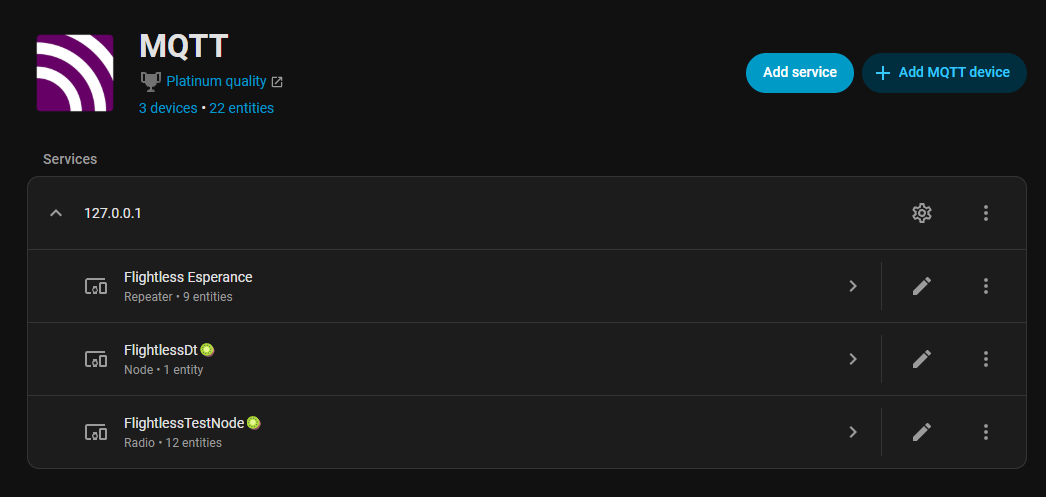
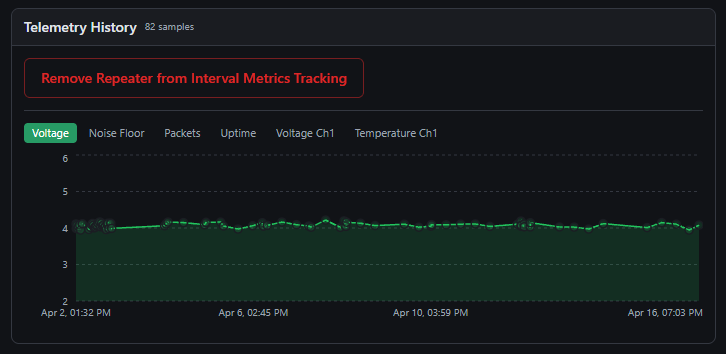
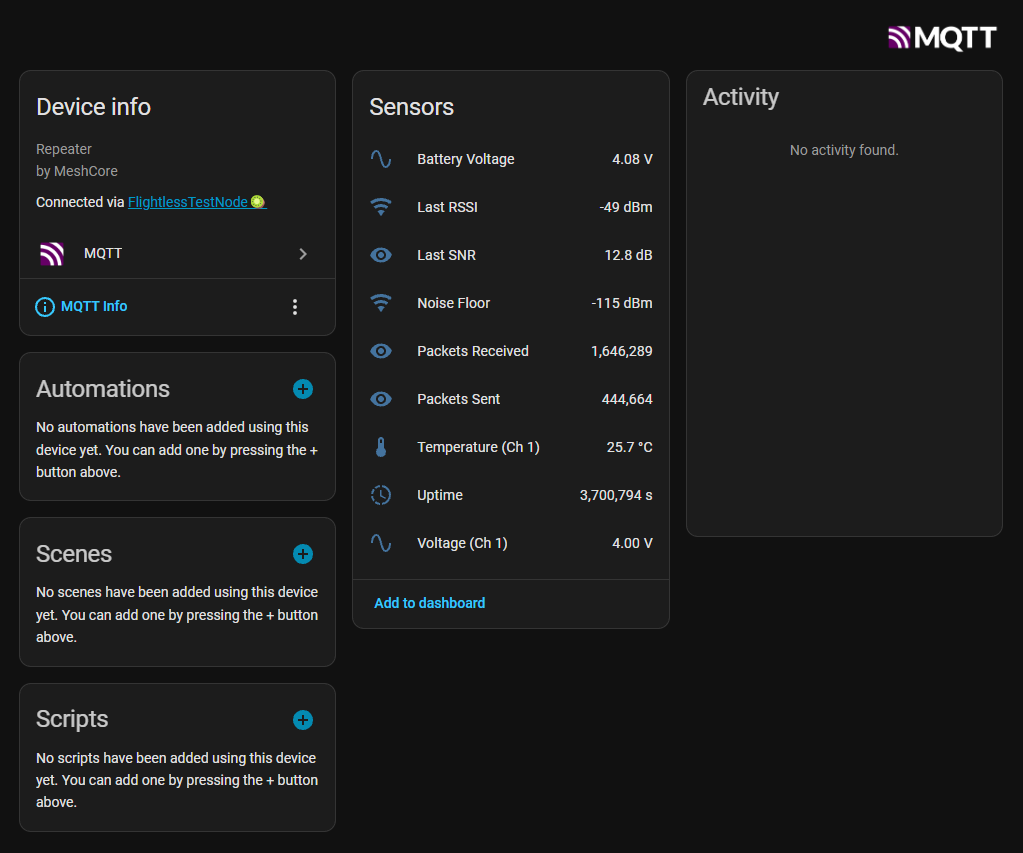
点击它们以查看可用的指标。对于中继,将显示最近可用且未过期的指标;如果你只是最近才启用自动遥测获取,你可能需要等待最长八小时,才能在 Home Assistant 中填充所有中继和无线电遥测字段。
如需更多配置指导,请查看 RemoteTerm 仓库中的 README_HA.md。例如,按照 "Full monitoring dashboard with message feed" 中的说明操作,将会得到如下所示的仪表板:

后续步骤
通过加入 官方 MeshCore Discord,并关注 RemoteTerm 的开发讨论串,随时了解 RemoteTerm 的最新开发进展或提出问题。代码库经常更新,你可以在 Changelog 中获取最新版本。当然,RemoteTerm 永远免费、无广告且开源——欢迎在 GitHub 上为它点亮一颗星。