使用 XIAO ESP32C6 (MR60BHA2) 的 60GHz 毫米波呼吸与心跳检测传感器套件入门指南

为 XIAO 推出我们先进的 mmWave Sensor Modules,专为 fall detection 和心跳监测提供前沿监控解决方案。模块由功能强大的 XIAO ESP32 微控制器驱动,内置 Wi-Fi 和 Bluetooth 连接,提供精确可靠的检测能力。无论是需要实时监测跌倒,还是以高灵敏度追踪心跳,我们的模块都配备了最先进的技术,包括可自定义的 RGB LED 和环境光感应。通过 Grove GPIO 端口轻松扩展,这些多功能模块非常适合从智能家居集成到医疗健康监测等广泛应用场景。
特性
- Wi-Fi & Bluetooth Enabled:两个模块均由预烧录 ESPHome 固件的 XIAO ESP32 驱动,确保快速设置和自定义。
- Heartbeat Detection Module:
- Sensitive Heartbeat Monitoring:可在最远 1.5 米处检测心跳。
- Static Presence Detection:可监测最远 6 米范围内的静止人员。
- 环境感知:
- BH1750 Light Sensor:测量 1 至 65,535 lux 的环境光。
- WS2812 RGB LED:可自定义的 LED,用于视觉反馈和 DIY 项目。
- 可扩展连接性:包含 Grove GPIO 端口,可添加额外传感器和模块。
规格参数
| 通用参数 | |
|---|---|
| mmWave Firmware | Breathing and Heartbeat Detection |
| Detection Range | Human Static Presence Detection: up to 6 Meters Breathing and Heartbeat Detection: 1.5 Meters |
| MCU | Seeed Studio XIAO ESP32C6 |
| LED | WS2812 RGB LED |
| Button | Rest |
| Light Sensor | BH1750 范围:1 至 65,535 lux,测量可调至 100,000 lux |
| Connectivity | 1 GPIO Port (D0, D10) |
| Pin Header Spacing | 2.54mm |
| Power Supply | 5V/1A Input |
| Power consumption | 0.5w:Standby Mode 0.8w:Activation Mode 1.4w:work with Grove Relay status |
应用场景
- 安防系统
- 医疗健康监测
- 智能家居自动化
- 老人看护
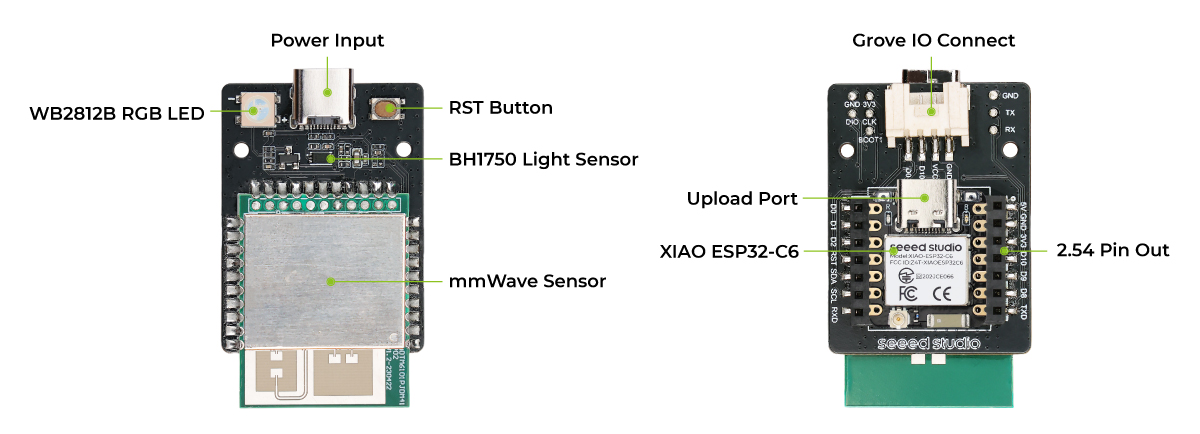
硬件概览
入门指南
安装方式与感应范围
最新的呼吸与心率雷达建议仅在睡眠场景中使用。请避免在办公桌前坐姿或运动过程中使用雷达的呼吸和心率功能,否则可能会导致较大误差。
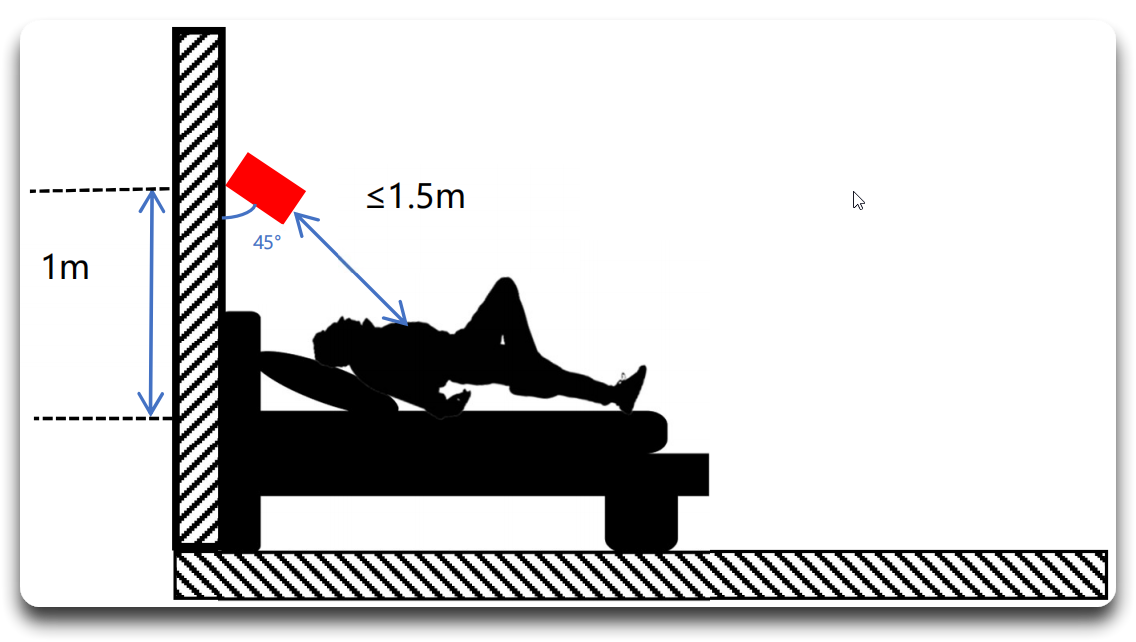
倾斜安装。对于睡眠呼吸和心率检测需求,可以采用倾斜安装方式。要求将雷达安装在床头正上方 1m 高度处,向下以 45° 角朝床中央倾斜,雷达与胸腔之间的距离控制在 1.5m 以内。雷达法线方向需对准主要检测位置,以确保雷达能够检测到呼吸和心跳数据。
请在开阔空间中使用本模块,并在探测范围内避免以下场景,以防干扰模块工作:
- 多个雷达安装得过于接近
- 风吹动窗帘、植物摇摆
- 水流和水膜
- 大面积金属和镜面反射
- 通过玻璃和薄木板进行检测
- 安装位置易产生振动
- 使用劣质电源
软件准备(Arduino)
默认情况下,MR60BHA2 已预装 XIAO ESP32C6,但它也兼容多种其他微控制器,用于通信与集成。
如果这是你第一次在 XIAO 系列上使用 Arduino,请根据你的开发板型号,参考相应的设置指南:
- XIAO ESP32S3:请参考 XIAO ESP32S3 Getting Started Guide。
- XIAO ESP32C3:请参考 Getting Started with Seeed Studio XIAO ESP32C3 指南。
- XIAO ESP32C6:请参考 Getting Started with Seeed Studio XIAO ESP32C6 指南。
在完成开发板设置后,继续执行以下步骤:
-
下载 Seeed mmWave 库:
- 从 GitHub 下载 Seeed mmWave library。
- 在 Arduino IDE 中安装库:
- 打开 Arduino IDE。
- 依次点击 Sketch > Include Library > Add .ZIP Library...。
- 选择下载好的
.zip文件以安装该库。
- 连接你的 XIAO 开发板:
- 通过 USB 将 XIAO 开发板连接到电脑。
- 在 Arduino IDE 中,前往 Tools > Board 并选择你的 XIAO 开发板型号。
- 在 Tools > Port 中选择正确的端口。
- 加载示例程序:
- 前往 File > Examples > Seeed Arduino mmWave。
- 选择与 Heartbeat Detection 相关的示例。
- 查看代码并根据需要进行修改。
- 上传示例程序:
- 点击 Upload 将代码烧录到 XIAO 开发板。
- 在 Arduino IDE 中打开 Serial Monitor 以查看实时传感器数据。
使用说明
本节提供示例代码片段,帮助你快速开始使用 Seeed Arduino mmWave Library 的多种功能,包括呼吸监测、RGB LED 控制和光照感应。
呼吸模块
此示例演示如何使用 MR60BHA2 传感器进行呼吸和心跳监测。
#include <Arduino.h>
#include "Seeed_Arduino_mmWave.h"
// Set up serial communication depending on the board type
#ifdef ESP32
# include <HardwareSerial.h>
HardwareSerial mmWaveSerial(0);
#else
# define mmWaveSerial Serial1
#endif
SEEED_MR60BHA2 mmWave;
void setup() {
Serial.begin(115200);
mmWave.begin(&mmWaveSerial);
}
void loop() {
if (mmWave.update(100)) {
float total_phase, breath_phase, heart_phase;
if (mmWave.getHeartBreathPhases(total_phase, breath_phase, heart_phase)) {
Serial.printf("total_phase: %.2f\t", total_phase);
Serial.printf("breath_phase: %.2f\t", breath_phase);
Serial.printf("heart_phase: %.2f\n", heart_phase);
}
float breath_rate;
if (mmWave.getBreathRate(breath_rate)) {
Serial.printf("breath_rate: %.2f\n", breath_rate);
}
float heart_rate;
if (mmWave.getHeartRate(heart_rate)) {
Serial.printf("heart_rate: %.2f\n", heart_rate);
}
float distance;
if (mmWave.getDistance(distance)) {
Serial.printf("distance: %.2f\n", distance);
}
}
}
在 Arduino 串口监视器上的输出如下所示:
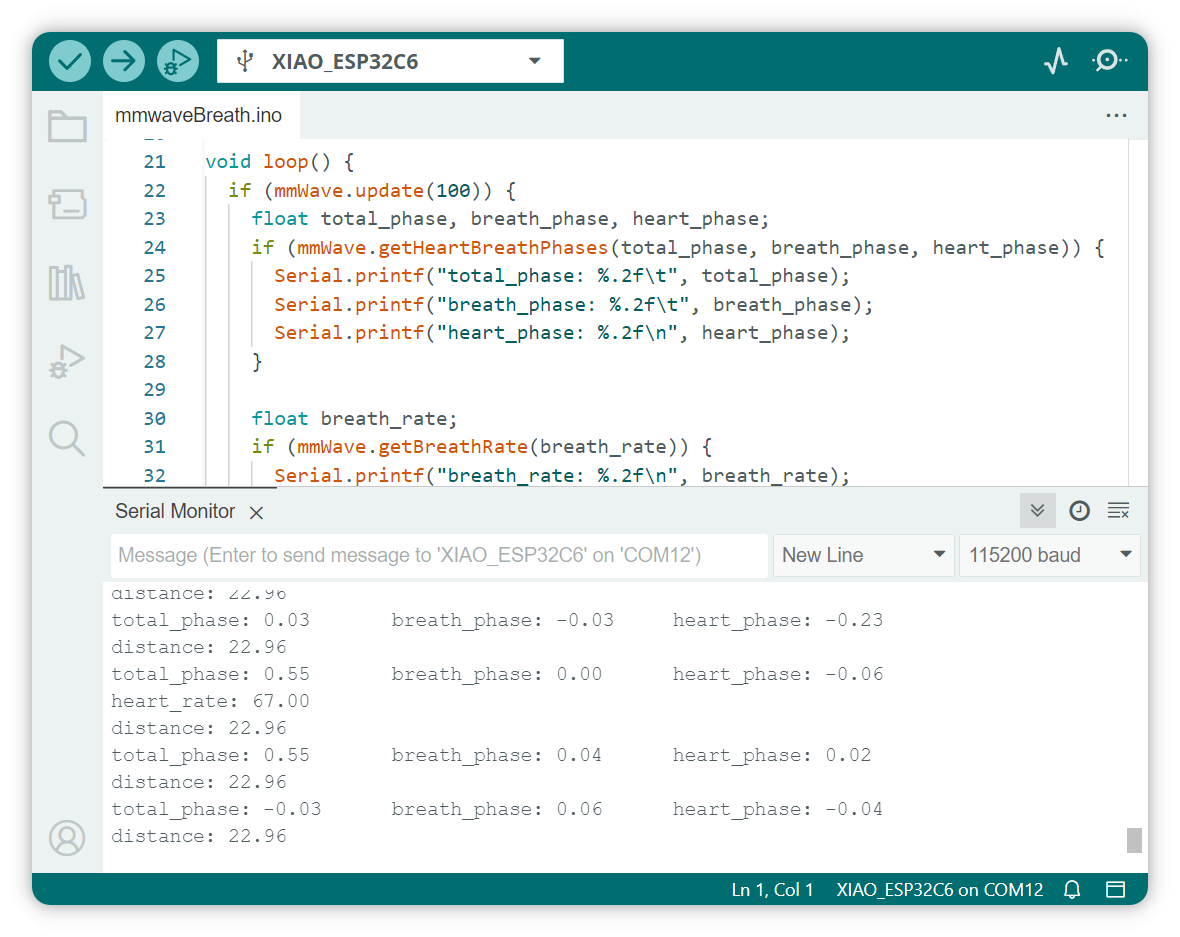
如果返回数据不是 0,则表示在检测范围内存在生命体。
人体检测
本示例演示如何使用 MR60BHA2 传感器进行人体检测。
请确保你已经将 MR60BHA2 模组的固件升级到最新版本。
最新固件增加了人体存在检测和人体目标相关功能。
#include <Arduino.h>
#include "Seeed_Arduino_mmWave.h"
// If the board is an ESP32, include the HardwareSerial library and create a
// HardwareSerial object for the mmWave serial communication
#ifdef ESP32
# include <HardwareSerial.h>
HardwareSerial mmWaveSerial(0);
#else
// Otherwise, define mmWaveSerial as Serial1
# define mmWaveSerial Serial1
#endif
SEEED_MR60BHA2 mmWave;
void setup() {
Serial.begin(115200);
mmWave.begin(&mmWaveSerial);
}
void loop() {
if (mmWave.update(100)) {
if (mmWave.isHumanDetected()) {
Serial.printf("-----Human Detected-----\n");
}
PeopleCounting target_info;
if (mmWave.getPeopleCountingTargetInfo(target_info)) {
Serial.printf("-----Got Target Info-----\n");
Serial.printf("Number of targets: %zu\n", target_info.targets.size());
for (size_t i = 0; i < target_info.targets.size(); i++) {
const auto& target = target_info.targets[i];
Serial.printf("Target %zu:\n", i + 1);
Serial.printf(" x_point: %.2f\n", target.x_point);
Serial.printf(" y_point: %.2f\n", target.y_point);
Serial.printf(" dop_index: %d\n", target.dop_index);
Serial.printf(" cluster_index: %d\n", target.cluster_index);
Serial.printf(" move_speed: %.2f cm/s\n", target.dop_index * RANGE_STEP);
}
}
// delay(500);
}
}
在 Arduino 串口监视器上的输出如下所示:
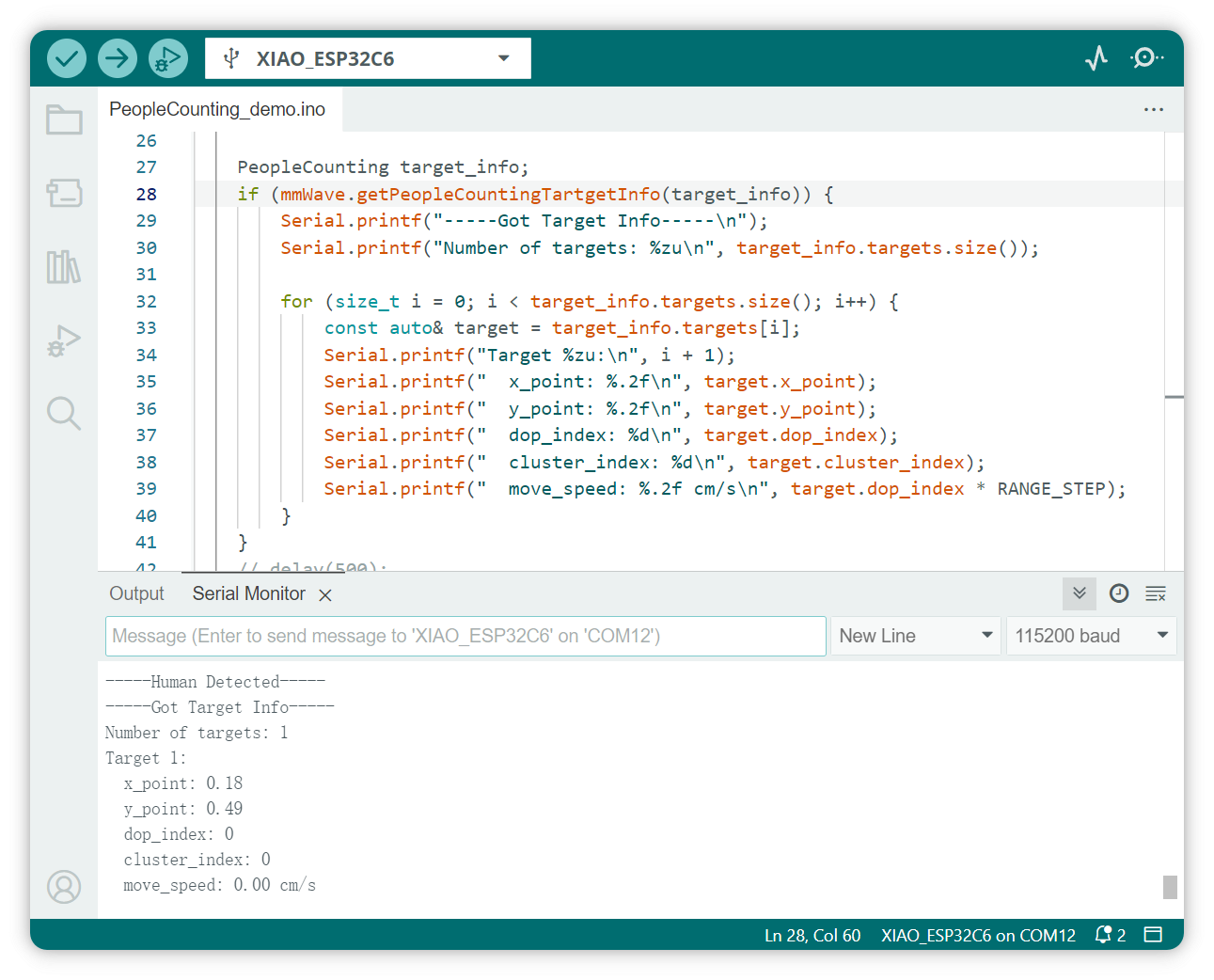
心率和呼吸可以在 1.5 米范围内检测到,而存在检测范围为 1.5 到 6 米。
当有人处于 1.5 米范围内时,模组将进入心跳和呼吸检测模式。
在此模式下,人体检测功能的灵敏度可能会降低。
让 RGB LED 闪烁
本示例演示如何使用 NeoPixel 库控制 RGB LED。
- 步骤 1. 下载
Adafruit_NeoPixel库
进入 Sketch > Include Liarbry > Manage Libraries...,搜索 Adafruit_NeoPixel,安装最新版本。
- 步骤 2. 将以下代码复制到一个新的草稿中:
#include <Adafruit_NeoPixel.h>
#include <Arduino.h>
const int pixelPin = D1;
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(1, pixelPin, NEO_GRB + NEO_KHZ800);
void setup() {
Serial.begin(115200);
pixels.begin();
pixels.clear();
pixels.show();
}
void loop() {
for (int i = 0; i < 10; i++) {
pixels.setPixelColor(0, pixels.Color(255, 0, 0));
pixels.show();
delay(100);
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();
delay(100);
}
for (int i = 255; i >= 0; i--) {
pixels.setPixelColor(0, pixels.Color(i, 0, 0));
pixels.show();
delay(10);
}
}
- 步骤 3. 选择正确的开发板和端口号并上传程序。
程序成功上传后,你会看到 mmWave Sensor Modules 右侧的 RGB LED 在闪烁。
光照传感器(BH1750)
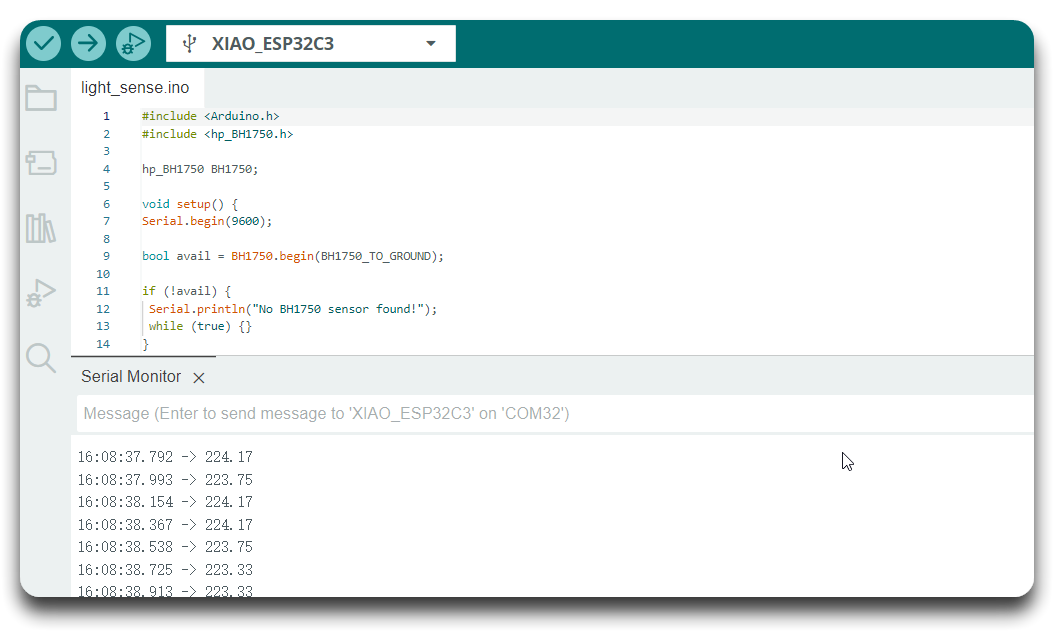
本示例演示如何使用 BH1750 传感器读取光照强度数值。
- 步骤 1. 下载
hp_BH1750库
进入 Sketch > Include Liarbry > Manage Libraries...,搜索 hp_BH1750,安装最新版本。
- 步骤 2. 将以下代码复制到一个新的草稿中:
#include <Arduino.h>
#include <hp_BH1750.h>
hp_BH1750 BH1750;
void setup() {
Serial.begin(9600);
bool avail = BH1750.begin(BH1750_TO_GROUND);
if (!avail) {
Serial.println("No BH1750 sensor found!");
while (true) {}
}
Serial.printf("conversion time: %dms\n", BH1750.getMtregTime());
BH1750.start();
}
void loop() {
if (BH1750.hasValue()) {
float lux = BH1750.getLux();
Serial.println(lux);
BH1750.start();
}
}
- 步骤 3. 选择正确的开发板和端口号并上传程序。
在 Arduino 串口监视器上的输出如下所示:
呼吸模组 API
本示例使用 SEEED_MR60BHA2 类与 MR60BHA2 传感器进行心率和呼吸监测的通信。下面是每个关键函数的作用说明:
-
mmWave.begin(&mmWaveSerial):- 使用指定的串口接口初始化传感器通信。它建立 XIAO 开发板与 MR60BHA2 传感器之间的连接。
-
mmWave.update(100):- 更新传感器数据。参数
100是以毫秒为单位的超时时间,用于指定等待传感器提供新数据的时长。如果在该时间内有新数据可用,函数将返回true。
- 更新传感器数据。参数
-
mmWave.getHeartBreathPhases(float &total_phase, float &breath_phase, float &heart_phase):- 获取与心率和呼吸活动相关的相位信息。
total_phase表示整体相位变化,而breath_phase和heart_phase分别对应呼吸和心跳活动的相位。
-
mmWave.getBreathRate(float &rate):- 获取传感器检测到的当前呼吸频率。频率通过引用变量
rate返回。
- 获取传感器检测到的当前呼吸频率。频率通过引用变量
-
mmWave.getHeartRate(float &rate):- 获取传感器检测到的当前心率。心率通过引用变量
rate返回。
- 获取传感器检测到的当前心率。心率通过引用变量
-
mmWave.getDistance(float &distance):- 获取从传感器到被检测物体(例如人体)的距离。该函数有助于了解检测信号的作用范围。
-
mmWave.getPeopleCountingPointCloud(PeopleCounting& point_cloud):- 获取点云相关信息。它仅实现消息类型的接收,即使没有数据也是正常的。
PeopleCounting结构体包含一个已检测目标的向量。每个目标包括以下属性:x_point: 目标的 X 坐标(单位:米)。y_point: 目标的 Y 坐标(单位:米)。dop_index: 多普勒索引,表示目标的速度。- 实际运动速度(单位:cm/s)可按如下方式计算:
dop_index * RANGE_STEP,其中RANGE_STEP为速度分辨率。
- 实际运动速度(单位:cm/s)可按如下方式计算:
cluster_index: 目标的聚类 ID,用于在场景中区分不同的目标。
-
mmWave.getPeopleCountingTartgetInfo(PeopleCounting& target_info):- 获取已检测目标的相关信息。
PeopleCounting结构体包含一个已检测目标的向量。每个目标包括以下属性:x_point: 目标的 X 坐标(单位:米)。y_point: 目标的 Y 坐标(单位:米)。dop_index: 多普勒索引,表示目标的速度。- 实际运动速度(单位:cm/s)可按如下方式计算:
dop_index * RANGE_STEP,其中RANGE_STEP为速度分辨率。
- 实际运动速度(单位:cm/s)可按如下方式计算:
cluster_index: 目标的聚类 ID,用于在场景中区分不同的目标。
-
mmWave.isHumanDetected():- 返回是否检测到人体。
模组固件升级
修改雷达固件是一个有风险的操作,因此在执行每一步之前,请务必仔细阅读本节内容并严格按照步骤操作。请注意,如果某一步操作不正确,雷达可能会变砖或无法使用。
特别说明,如果你购买的是 Fall Radar MR60FDA2,请不要通过以下方式非法烧录固件,否则一定会导致设备变砖!!!!
首先,将 XIAO ESP32C6 和 MR60BHA2 模组连接在一起。然后使用以下代码为 XIAO 烧录程序。
#include <Arduino.h>
#include "Seeed_Arduino_mmWave.h"
// If the board is an ESP32, include the HardwareSerial library and create a
// HardwareSerial object for the mmWave serial communication
#ifdef ESP32
# include <HardwareSerial.h>
HardwareSerial mmWaveSerial(0);
#else
// Otherwise, define mmWaveSerial as Serial1
# define mmWaveSerial Serial1
#endif
void setup() {
// Initialize the serial communication for debugging
Serial.begin(115200);
while (!Serial) {
; // Wait for Serial to initialize
}
// Initialize the mmWaveSerial communication
mmWaveSerial.begin(115200);
}
void loop() {
// Check if there is data available from mmWaveSerial
while (mmWaveSerial.available() > 0) {
char receivedChar = mmWaveSerial.read();
Serial.write(receivedChar); // Forward data to Serial
}
// Check if there is data available from Serial
while (Serial.available() > 0) {
char receivedChar = Serial.read();
mmWaveSerial.write(receivedChar); // Forward data to mmWaveSerial
}
}
上述代码的作用是将模组的串口透传到 XIAO 的 USB 串口,从而通过 XIAO 来升级模组的固件。
请在升级过程中将 XIAO 连接到你的电脑。
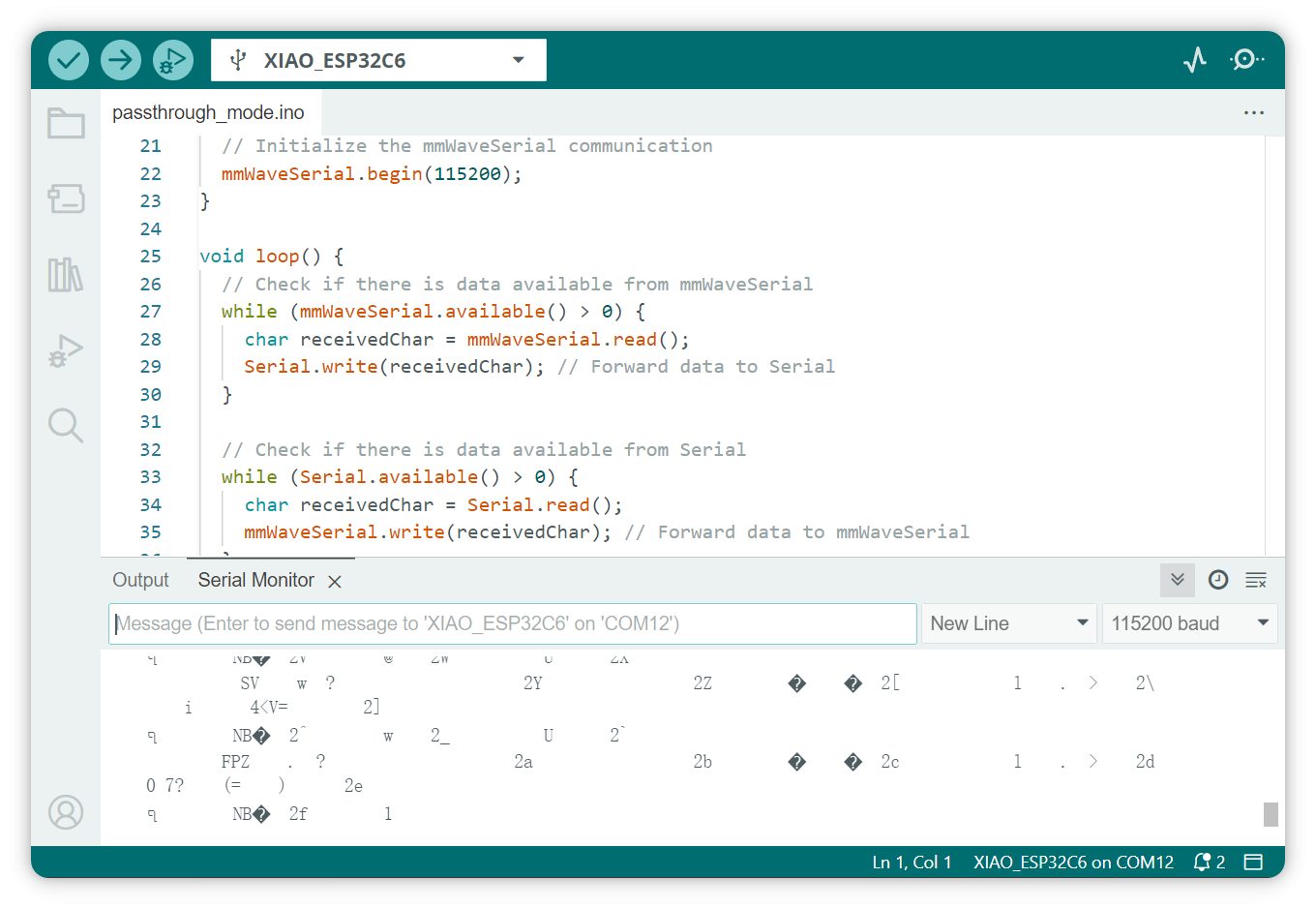
你将会看到模组发送的原始数据。
然后你需要在此处下载并解压 OTA 工具和固件。
固件 1.6.12 的更新内容如下:
-
修复了在 1.5 米范围内静止时目标丢失的问题。
-
优化了 0–3 米范围内移动目标的跟踪稳定性,解决了之前目标坐标不准确的问题。但上报刷新率有所下降。
-
呼吸和心率精度——本次版本无更新。相关机器学习训练仍在持续优化中,预计在月底左右发布提升呼吸和心率精度的固件更新。此前的呼吸和心率算法存在根本性问题,这些问题已得到解决。
- MR60BHA2 Firmware upgrade tool: MR60BHA2_OTA.zip
- MR60BHA2 Firmware v1.6.12: MR60BHA2_eeprom_1.6.12.bin
点击此处预览旧版本
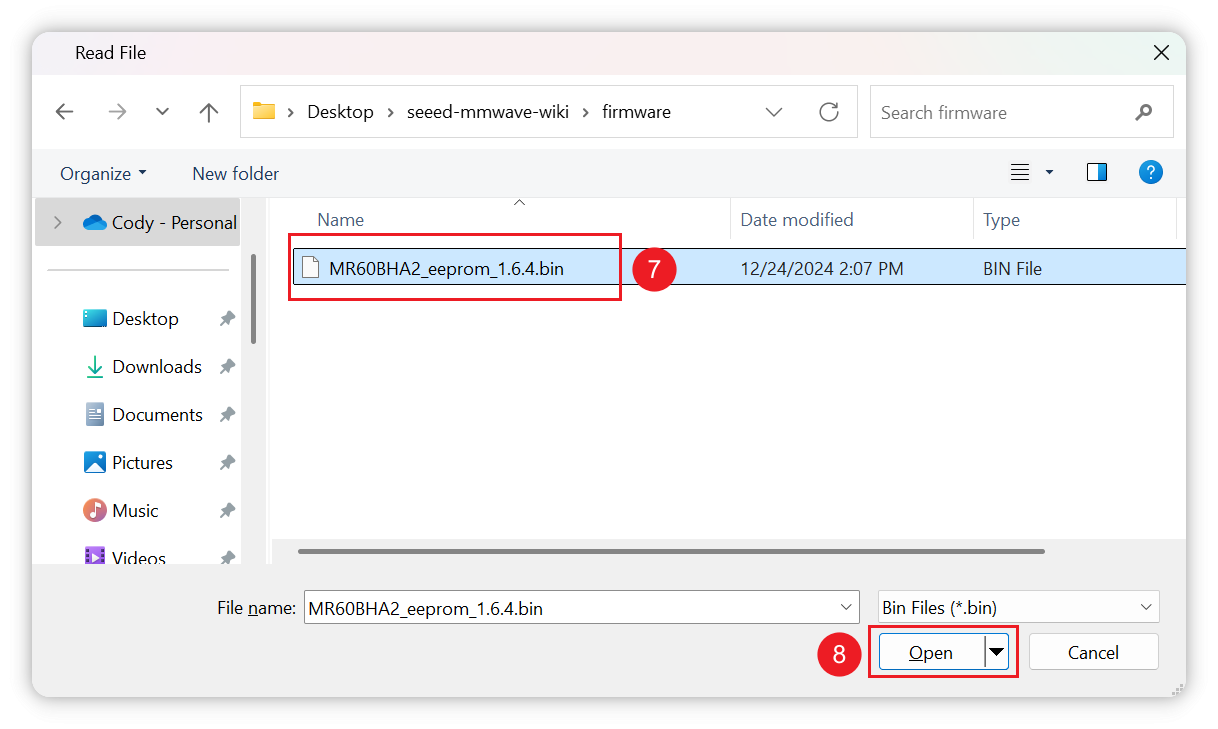
- MR60BHA2 Firmware v1.6.4: MR60BHA2_eeprom_1.6.4.bin
固件 1.6.4 的更新内容如下:
- 优化了呼吸和心率检测功能,修复了因身体轻微移动导致数据丢失的 bug。
- 增强了 3D 在席检测功能:在 1.5 米范围内可检测呼吸和心率,在 1.5–6 米范围内可检测在席状态。
- 新增人员检测功能,可在 6 米范围内检测最多 3 个人。
- MR60BHA2 Firmware v1.6.5: MR60BHA2_eeprom_1.6.5.bin
固件 1.6.5 的更新内容如下:
- 修复了人体静止时有时无法检测到呼吸和心率的问题。
- MR60BHA2 Firmware v1.6.10: MR60BHA2_eeprom_1.6.10.bin
固件 1.6.10 的更新内容如下:
- 优化了呼吸机制,解决了屏息时长不下降的问题。
- 新增数据采集功能。
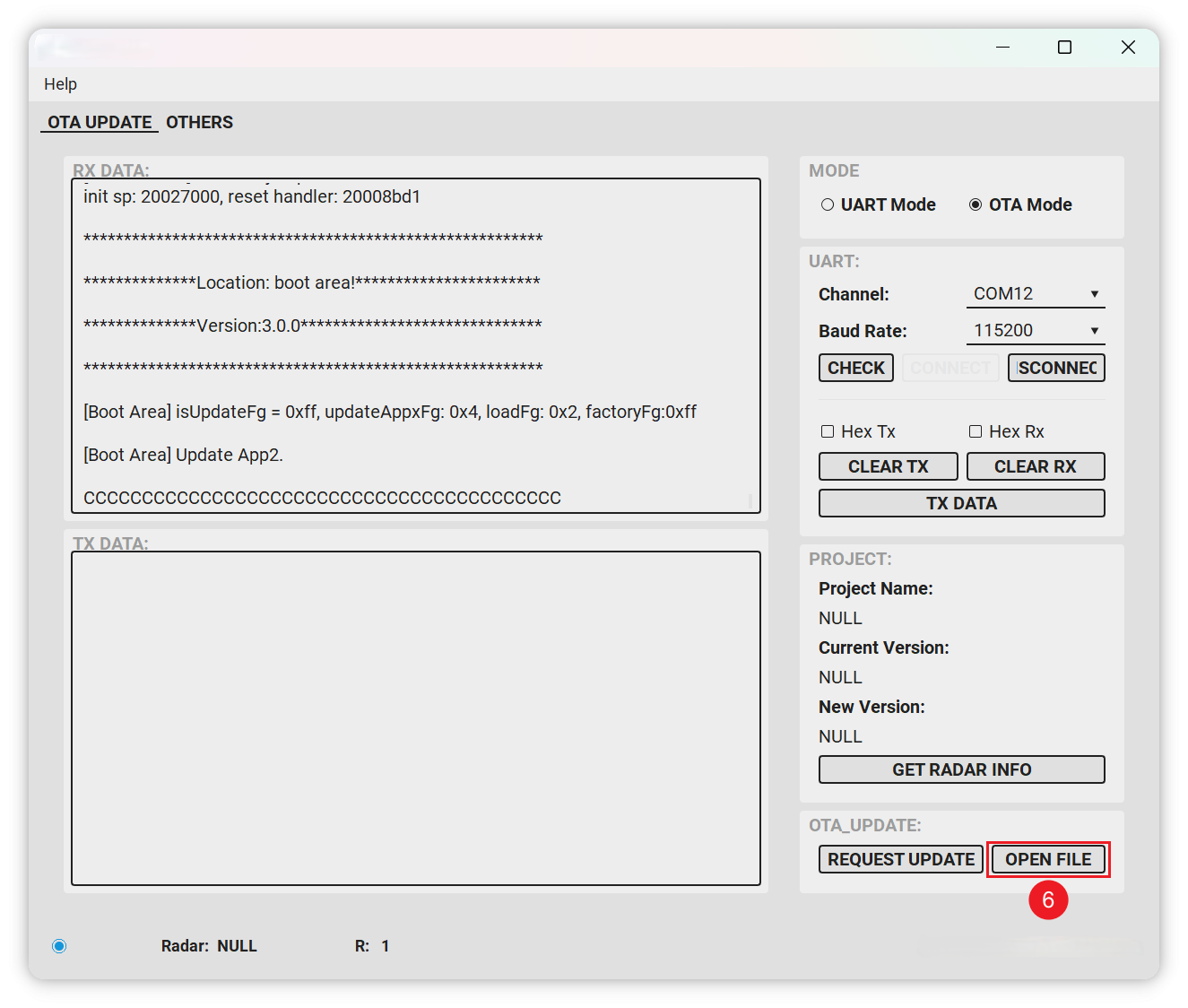
- 检查并连接串口(将波特率设置为 115200)
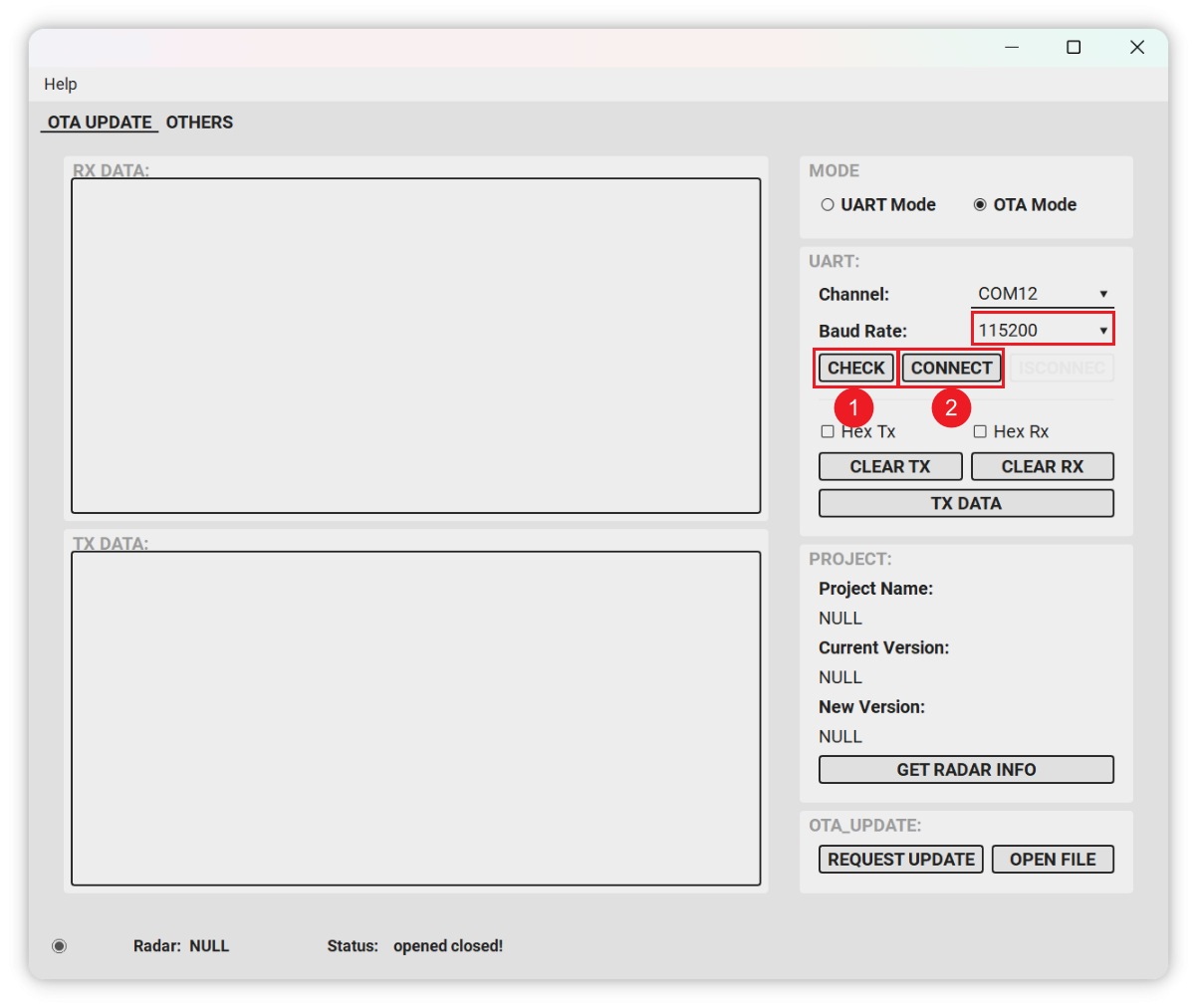
- 点击 "REQUEST UPDATE" 进入升级模式:
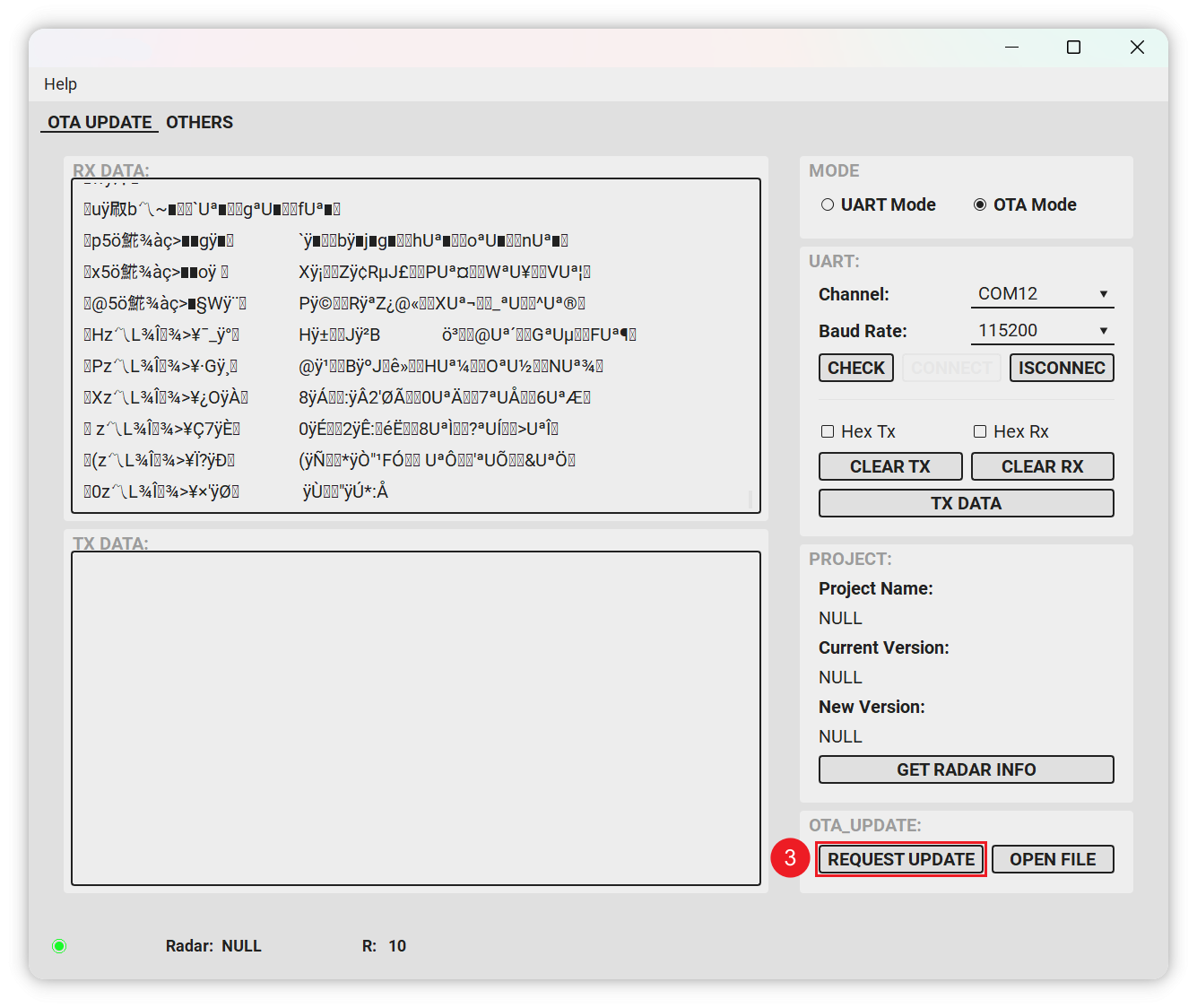
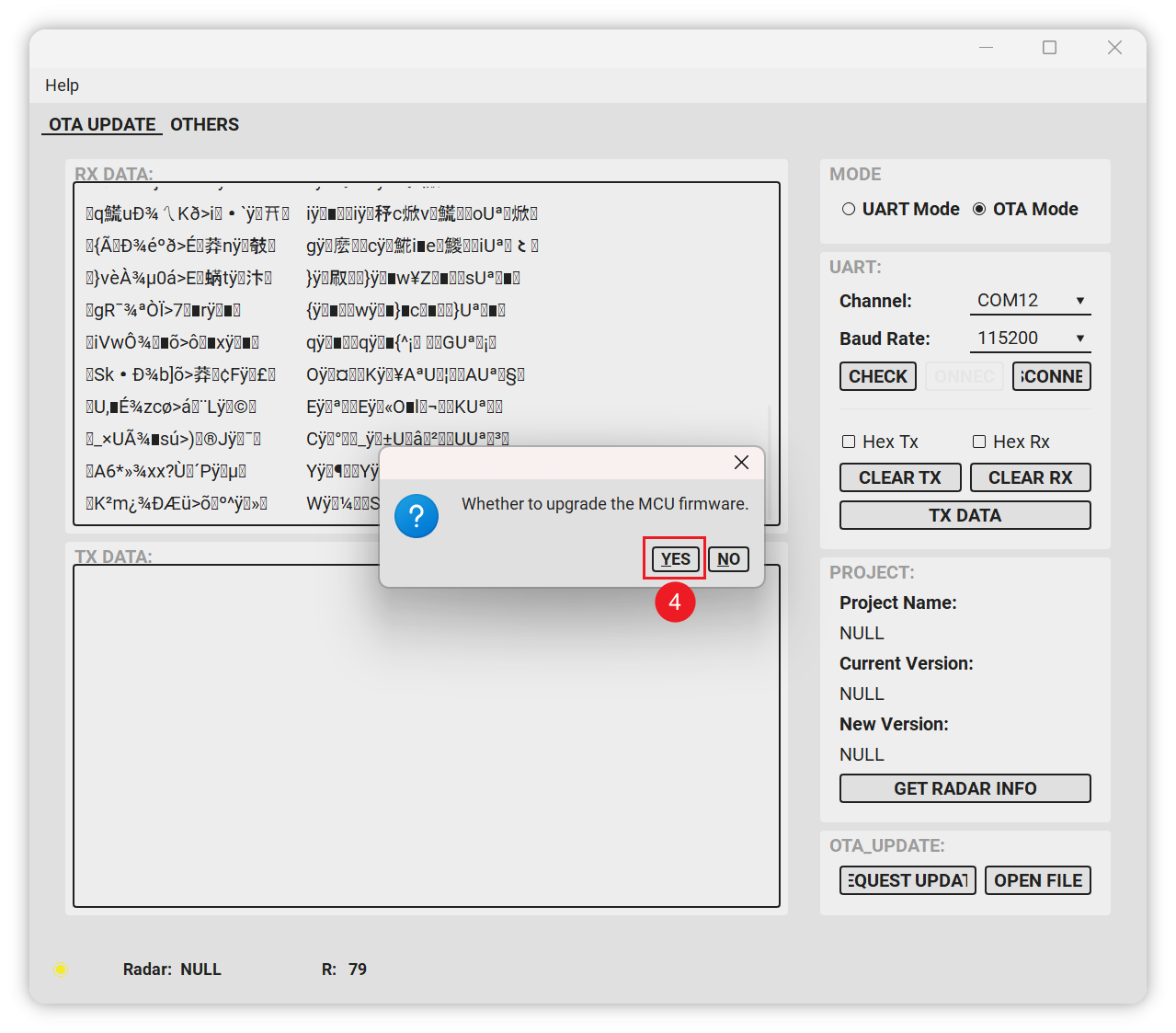
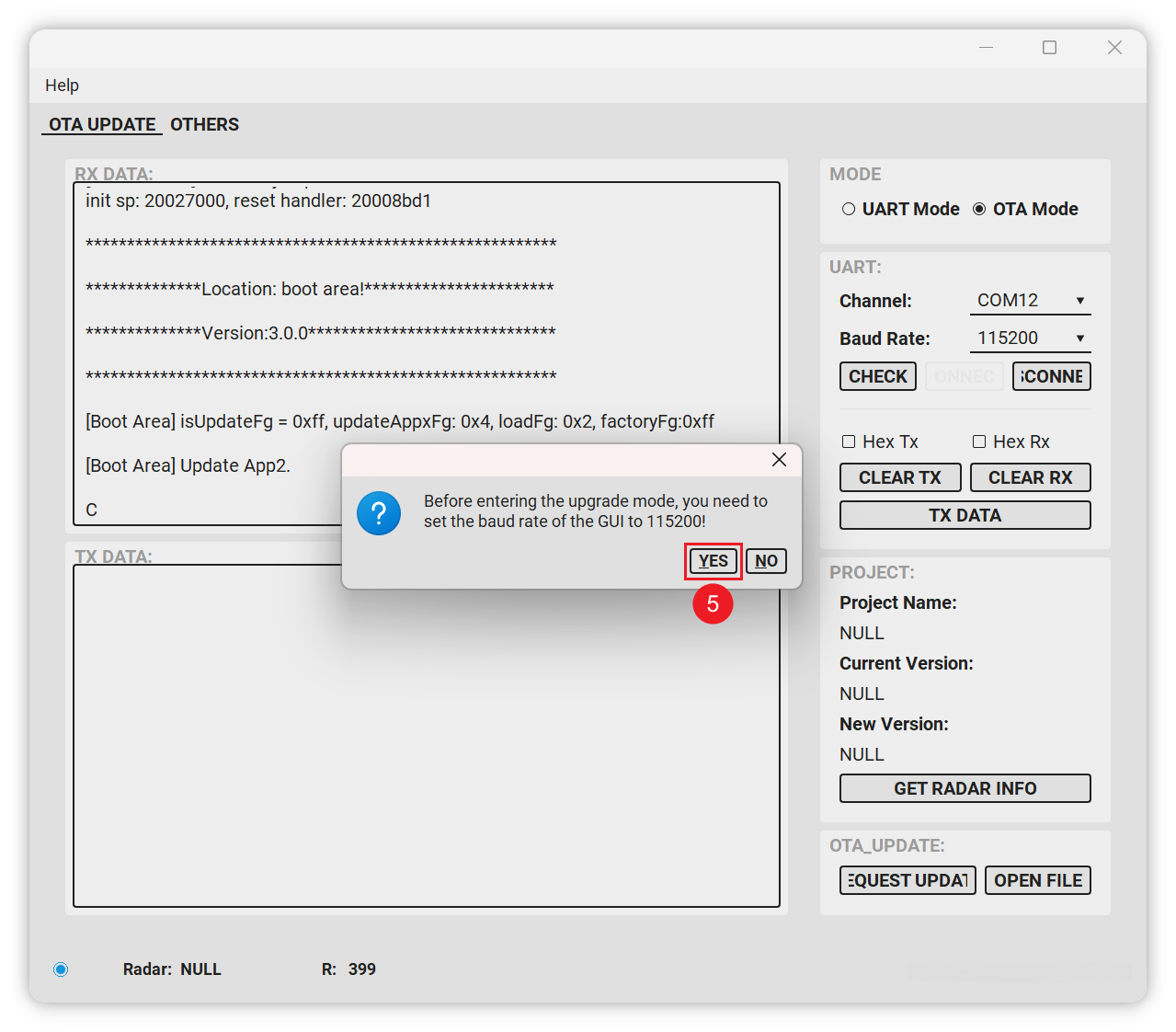
- 如果打印出 "C" 或 "43",则表示模组已进入升级模式。
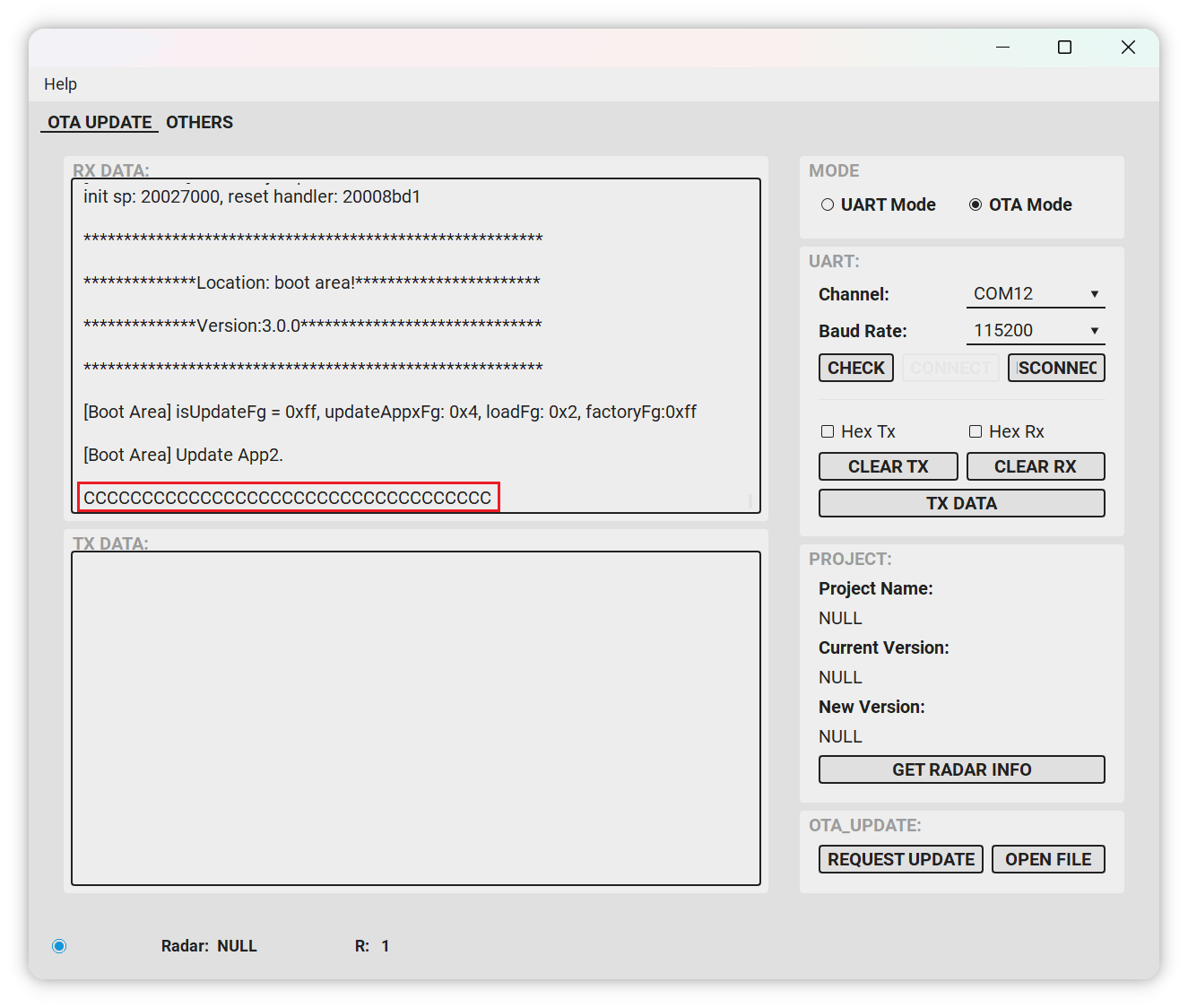
- 选择需要升级的固件。选择后会自动进入升级状态。
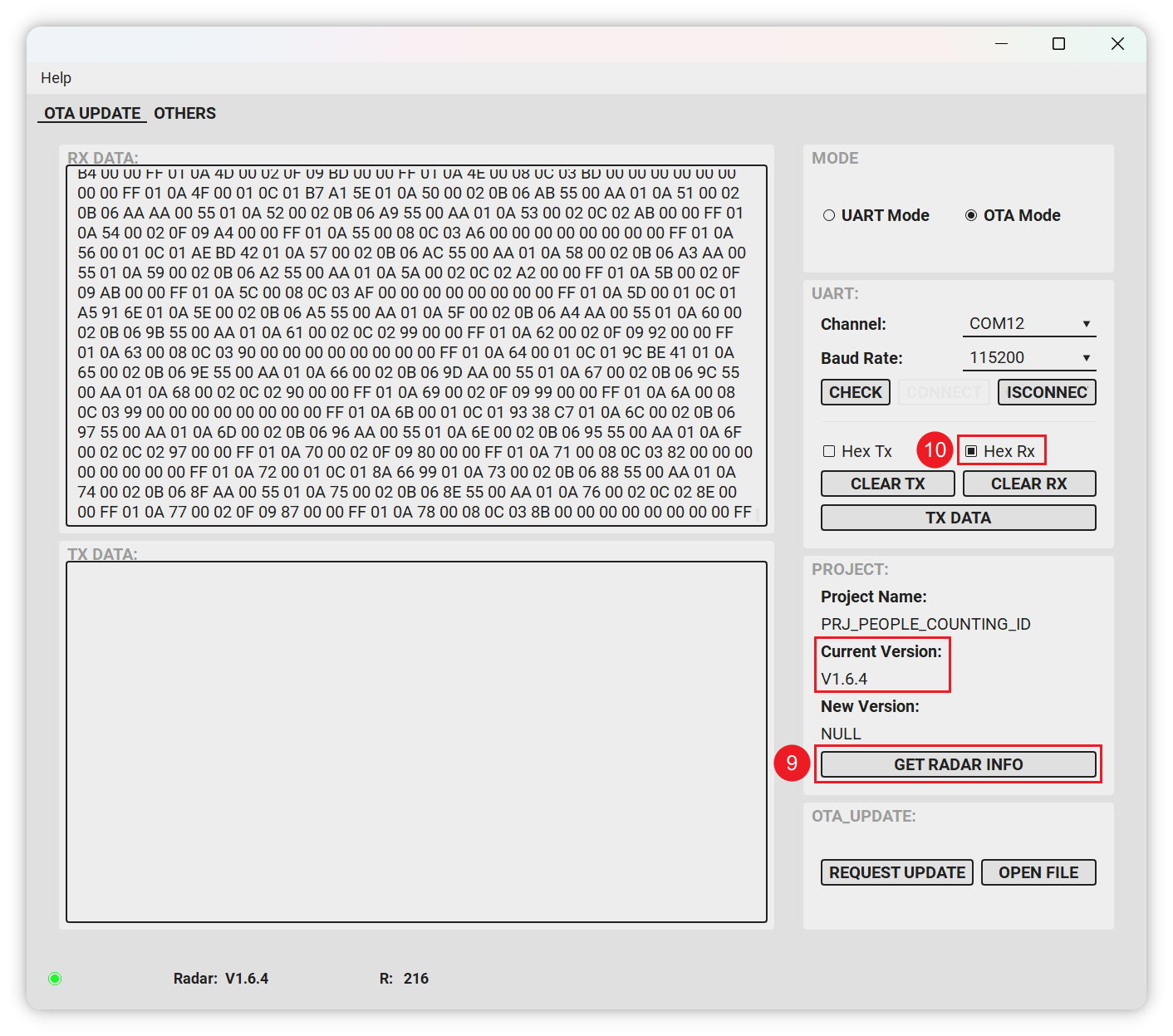
升级完成后会自动跳转到正常模式。如果没有跳转,请断电重启,然后使用 OTA 工具查看串口数据。
- 升级完成后,你可以使用 OTA 工具读取版本信息和原始数据。
- 升级完成后,你需要重新为 XIAO ESP32C6 烧录固件。
如果在上述步骤中操作不当导致出现异常,无法再次尝试烧录固件且雷达无法正常工作,那么雷达可能因固件损坏而变砖。尝试恢复设备的唯一方法是参考 here 中的文件和文档。不过请理解,对于因错误操作导致设备变砖的情况,我们不提供技术支持和协助。
开放定制
想要为你的独特应用量身定制这套套件吗?
如果你在定制 mmWave 模组时,需要了解更多关于 3D 点云数据生成和干扰区域配置的信息,Seeed 提供从概念到量产的一站式研发定制与制造服务。请通过 [email protected] 联系我们以了解更多信息。
雷达的固件和算法并非开源,且雷达的复杂参数(如 3D 点云、检测距离、量程等)需要定制化服务,这可能会涉及额外的定制费用和最小起订量(MOQ)要求。
资源
- STL: mmWave 3D Case
- GitHub Repository: 在 Seeed mmWave Library GitHub page 获取完整代码库和文档。
- ESPHome Documentation: 如需进一步定制和集成,请参考 ESPHome documentation。
- MR60BHA2 Firmware upgrade tool: MR60BHA2_OTA.zip
- MR60BHA2 Firmware v1.6.12: MR60BHA2_eeprom_1.6.12.bin
- MR60BHA2 GUI Software: Seeed_Studio_mmWave_Sensor_MR60BHA2_GUI.zip
- mmWave Sensor SCH V1.0: mmWave_Sensor_SCH_V1.0.pdf
- MR60BHA2 Module Technical Specification: MR60BHA2_Breathing_and_Heartbeat_Module.pdf
- MR60BHA2 Tiny Frame Interface Manual: Seeed_Studio_Tiny_Frame_Interface_Breathing_and_Heartbeat.pdf
- 通过 Jlink 的雷达固件恢复方法: Radar_Firmware_Recovery_Method-Jlink.zip
技术支持与产品讨论
感谢您选择我们的产品!我们将为您提供多种支持,以确保您在使用我们产品时拥有尽可能顺畅的体验。我们提供多种沟通渠道,以满足不同的偏好和需求。