开始使用 60GHz 毫米波跌倒检测传感器套件与 XIAO ESP32C6 (MR60FDA2)

介绍我们先进的 毫米波传感器模块 for XIAO,旨在为跌倒检测和心跳监测提供前沿的监控解决方案。由强大的 XIAO ESP32 微控制器驱动,内置 Wi-Fi 和蓝牙连接功能,这些模块提供精确可靠的检测能力。无论您需要实时监测跌倒还是以敏感精度跟踪心跳,我们的模块都配备了最先进的技术,包括可定制的 RGB LED 和环境光感应。通过 Grove GPIO 端口的简易扩展选项,这些多功能模块非常适合广泛的应用,从智能家居集成到医疗保健监测。
特性
- Wi-Fi 和蓝牙功能:两个模块都由 XIAO ESP32 驱动,预刷入 ESPHome 固件,确保快速设置和定制。
- 跌倒检测模块:
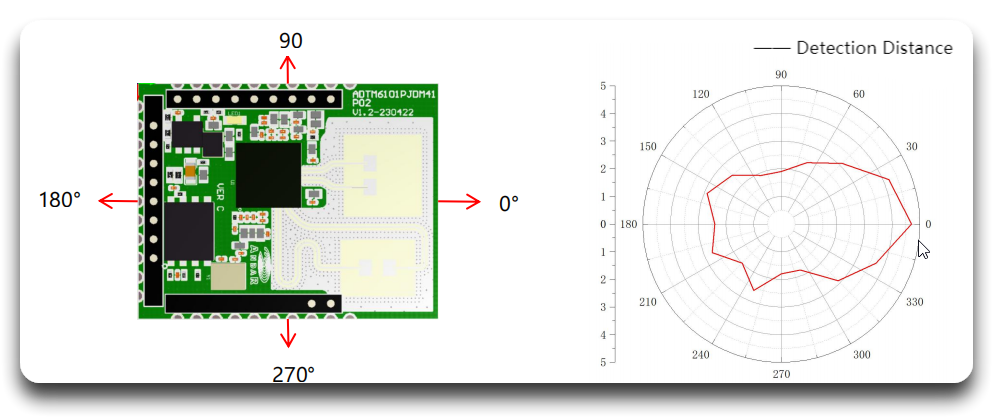
- 精确跌倒检测:覆盖 3x3x3 米区域,检测角度为 100° x 40°。
- 静态存在检测:监测最远 6 米的静止个体。
- 环境感应:
- BH1750 光传感器:测量 1 到 65,535 勒克斯的环境光。
- WS2812 RGB LED:可定制 LED,用于视觉反馈和 DIY 项目。
- 可扩展连接:包含 Grove GPIO 端口,用于添加额外的传感器和模块。
规格
| 通用参数 | |
|---|---|
| 毫米波固件 | 跌倒检测监测 |
| 检测范围 | 人体静态存在检测:最远 6 米 跌倒检测: - 3x3x3 米范围 - 水平视场角 (FoV) 120° - 垂直视场角 100° |
| MCU | Seeed Studio XIAO ESP32C6 |
| LED | WS2812 RGB LED |
| 按钮 | 复位 |
| 光传感器 | BH1750 范围:1 到 65,535 勒克斯,可调测量高达 100,000 勒克斯 |
| 连接性 | 1 个 GPIO 端口 (D0, D10) |
| 引脚间距 | 2.54mm |
| 电源供应 | 5V/1A 输入 |
| 功耗 | 0.5w:待机模式 0.8w:激活模式 1.4w:与 Grove 继电器状态一起工作 |
应用
- 安全系统
- 健康监测
- 智能家居自动化
- 老年人护理
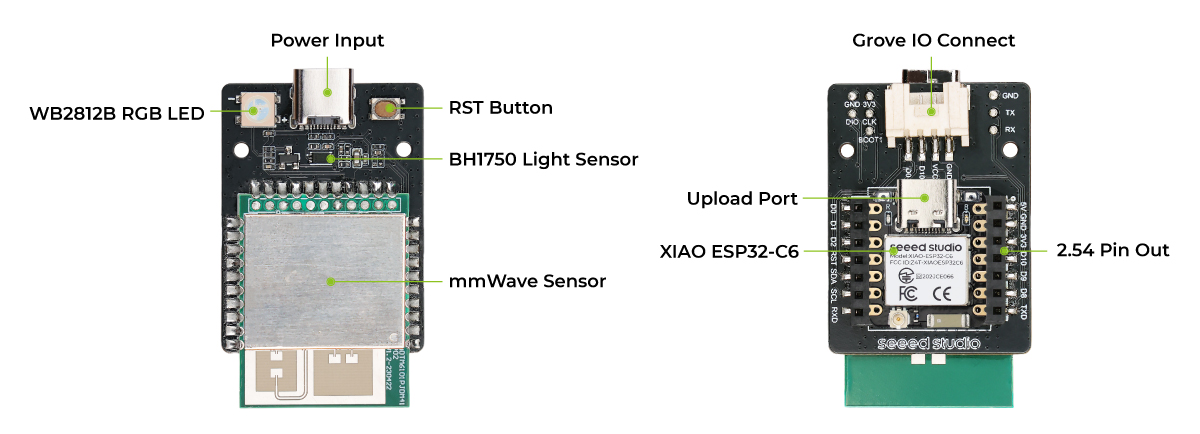
硬件概述
入门指南
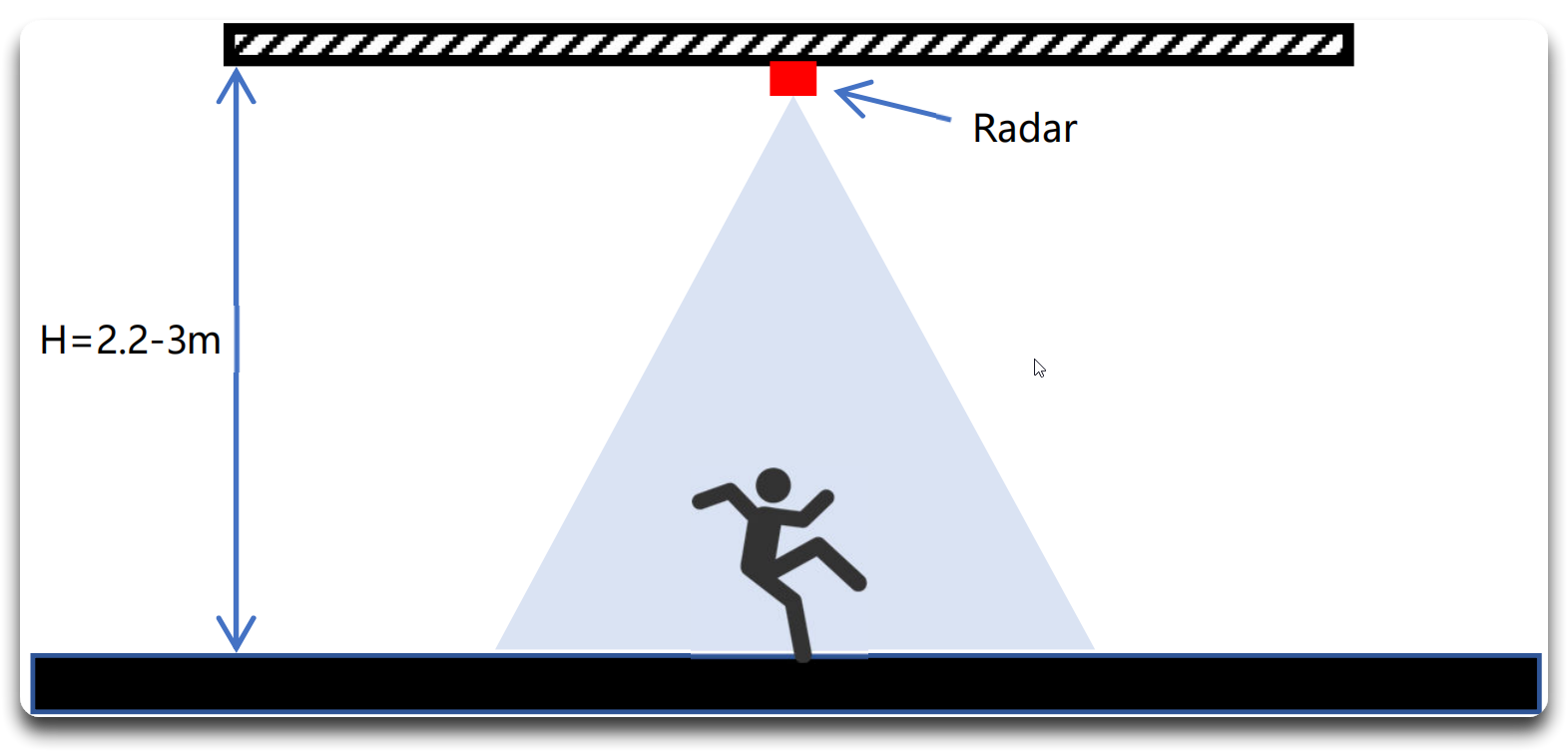
安装方法和感应范围
顶装悬挂高度2.2-3.0m,最大感应半径2m,毫米波传感器一侧需要对准检测方向。
请在开放空间中使用此模块,并避免在检测范围内出现以下情况,以防止对模块造成干扰:
- 多个雷达安装距离过近
- 风吹动窗帘和摇摆植物
- 水流和水膜
- 大面积金属和镜面反射
- 透过玻璃和薄木板检测
- 安装位置容易产生振动
- 使用劣质电源
软件准备(Arduino)
默认情况下,MR60BHA2 预装了 XIAO ESP32C6,但它也兼容各种其他微控制器进行通信和集成。
如果这是您第一次在 XIAO 系列上使用 Arduino,请按照适合您开发板的设置指南进行操作:
- XIAO ESP32S3:参考 XIAO ESP32S3 入门指南。
- XIAO ESP32C3:按照 Seeed Studio XIAO ESP32C3 入门指南 进行操作。
- XIAO ESP32C6:按照 Seeed Studio XIAO ESP32C6 入门指南 进行操作。
设置好开发板后,请按照以下步骤操作:
- 下载 Seeed mmWave 库:
- 从 GitHub 下载 Seeed mmWave 库。
- 在 Arduino IDE 中安装库:
- 打开 Arduino IDE。
- 导航到 项目 > 加载库 > 添加 .ZIP 库...。
- 选择下载的
.zip文件来安装库。
- 连接您的 XIAO 开发板:
- 通过 USB 将您的 XIAO 开发板连接到计算机。
- 在 Arduino IDE 中,转到 工具 > 开发板 并选择您的 XIAO 开发板型号。
- 在 工具 > 端口 下选择正确的端口。
- 加载示例代码:
- 转到 文件 > 示例 > Seeed Arduino mmWave。
- 选择跌倒检测的相关示例。
- 查看代码并进行必要的调整。
- 上传代码:
- 点击 上传 将代码烧录到您的 XIAO 开发板。
- 在 Arduino IDE 中打开 串口监视器 查看实时传感器数据。
使用方法
本节提供示例代码片段,帮助您快速开始使用 Seeed Arduino mmWave 库的各种功能,包括跌倒检测、RGB LED 控制和光感应。
Fall Module
这个例子展示了如何使用 MR60FDA2 传感器进行跌倒检测。
#include <Adafruit_NeoPixel.h>
#include <Arduino.h>
#include <hp_BH1750.h> //inlude the library
#include "Seeed_Arduino_mmWave.h"
#ifdef ESP32
# include <HardwareSerial.h>
HardwareSerial mmwaveSerial(0);
#else
# define mmwaveSerial Serial1
#endif
#define LIGHT_GPIO D0
/****** instance ******/
hp_BH1750 BH1750; // create the sensor object
SEEED_MR60FDA2 mmWave;
Adafruit_NeoPixel pixels =
Adafruit_NeoPixel(1, /* pixelPin */ D1, NEO_GRB + NEO_KHZ800);
/****** funtions ******/
void relay_init();
void relay_on();
void relay_off();
/****** variables ******/
uint32_t sensitivity = 15;
float height = 2.8, threshold = 1.0;
float rect_XL, rect_XR, rect_ZF, rect_ZB;
const uint8_t dark_lux = 10;
void setup() {
bool result;
Serial.begin(115200);
mmWave.begin(&mmwaveSerial);
/* init relay device*/
relay_init();
/* init RGB LED */
pixels.begin();
pixels.clear();
pixels.setBrightness(8);
pixels.show();
pixels.setPixelColor(0, pixels.Color(125, 125, 125));
/* init built-in light ambient light sensor */
BH1750.begin(BH1750_TO_GROUND); // will be false no sensor found
// | already connected to I2C
BH1750.calibrateTiming();
BH1750.start(BH1750_QUALITY_HIGH2,
254); // start the first measurement in setup
/* set mmwave-fall parameters */
mmWave.setUserLog(0);
/** set the height of the installation **/
if (mmWave.setInstallationHeight(height)) {
Serial.printf("setInstallationHeight success: %.2f\n", height);
} else {
Serial.println("setInstallationHeight failed");
}
/** Set threshold **/
if (mmWave.setThreshold(threshold)) {
Serial.printf("setThreshold success: %.2f\n", threshold);
} else {
Serial.println("setThreshold failed");
}
/** Set sensitivity **/
if (mmWave.setSensitivity(sensitivity)) {
Serial.printf("setSensitivity success %d\n", sensitivity);
} else {
Serial.println("setSensitivity failed");
}
/** get new parameters of mmwave **/
if (mmWave.getRadarParameters(height, threshold, sensitivity, rect_XL,
rect_XR, rect_ZF, rect_ZB)) {
Serial.printf("height: %.2f\tthreshold: %.2f\tsensitivity: %d\n", height,
threshold, sensitivity);
Serial.printf(
"rect_XL: %.2f\trect_XR: %.2f\trect_ZF: %.2f\trect_ZB: %.2f\n", rect_XL,
rect_XR, rect_ZF, rect_ZB);
} else {
Serial.println("getRadarParameters failed");
}
}
typedef enum {
EXIST_PEOPLE,
NO_PEOPLE,
PEOPLE_FALL,
} MMWAVE_STATUS;
MMWAVE_STATUS status = NO_PEOPLE, last_status = NO_PEOPLE;
float lux = 100;
void loop() {
/* get status */
if (mmWave.update(100)) {
bool is_human, is_fall;
// Get the human detection status
if (mmWave.getHuman(is_human)) {
// Get the fall detection status
if (mmWave.getFall(is_fall)) {
// Determine the status based on human and fall detection
if (!is_human && !is_fall) {
status = NO_PEOPLE; // No human and no fall detected
} else if (is_fall) {
status = PEOPLE_FALL; // Fall detected
} else {
status = EXIST_PEOPLE; // Human detected without fall
}
}
}
// Get the human detection status
if (!mmWave.getHuman(is_human) && !mmWave.getFall(is_fall)) {
status = NO_PEOPLE; // No human and no fall detected
} else if (is_fall) {
status = PEOPLE_FALL; // Fall detected
} else {
status = EXIST_PEOPLE; // Human detected without fall
}
}
switch (status) {
case NO_PEOPLE:
Serial.printf("Waiting for people");
break;
case EXIST_PEOPLE:
Serial.printf("PEOPLE !!!");
break;
case PEOPLE_FALL:
Serial.printf("FALL !!!");
break;
default:
break;
}
Serial.print("\n");
/* change interactive Light*/
if (status != last_status) { // switching LED
switch (status) {
case NO_PEOPLE:
pixels.setPixelColor(0, pixels.Color(0, 0, 255)); // BLUE
break;
case EXIST_PEOPLE:
pixels.setPixelColor(0, pixels.Color(0, 255, 0)); // GREEN
break;
case PEOPLE_FALL:
pixels.setPixelColor(0, pixels.Color(255, 0, 0)); // RED
break;
default:
break;
}
pixels.show();
last_status = status;
}
/* update lux value */
if (BH1750.hasValue() == true) {
lux = BH1750.getLux();
BH1750.start(BH1750_QUALITY_HIGH2, 254);
}
Serial.print("LUX: ");
Serial.print(lux);
Serial.print("\t");
if ((status == EXIST_PEOPLE || status == PEOPLE_FALL) && lux < dark_lux) {
relay_on();
} else {
relay_off();
}
}
void relay_init() {
pinMode(LIGHT_GPIO, OUTPUT);
}
void relay_on() {
digitalWrite(LIGHT_GPIO, HIGH);
}
void relay_off() {
digitalWrite(LIGHT_GPIO, LOW);
}
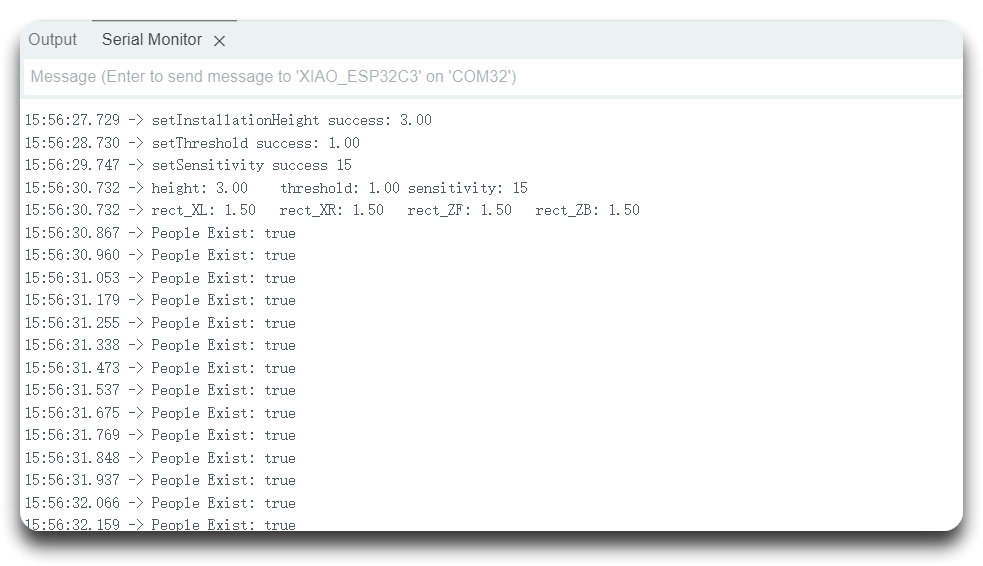
Arduino 串口监视器的输出如下:
闪烁 RGB LED
此示例演示如何使用 NeoPixel 库控制 RGB LED。
- 步骤 1. 下载
Adafruit_NeoPixel库
导航到 Sketch > Include Library > Manage Libraries...,搜索 Adafruit_NeoPixel,安装最新版本。
- 步骤 2. 将以下代码复制到新的草图中:
#include <Adafruit_NeoPixel.h>
#include <Arduino.h>
const int pixelPin = D1;
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(1, pixelPin, NEO_GRB + NEO_KHZ800);
void setup() {
Serial.begin(115200);
pixels.begin();
pixels.clear();
pixels.show();
}
void loop() {
for (int i = 0; i < 10; i++) {
pixels.setPixelColor(0, pixels.Color(255, 0, 0));
pixels.show();
delay(100);
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();
delay(100);
}
for (int i = 255; i >= 0; i--) {
pixels.setPixelColor(0, pixels.Color(i, 0, 0));
pixels.show();
delay(10);
}
}
- 步骤 3. 选择正确的开发板和端口号来上传程序。
程序成功上传后,您将看到毫米波传感器模块右侧的RGB LED开始闪烁。
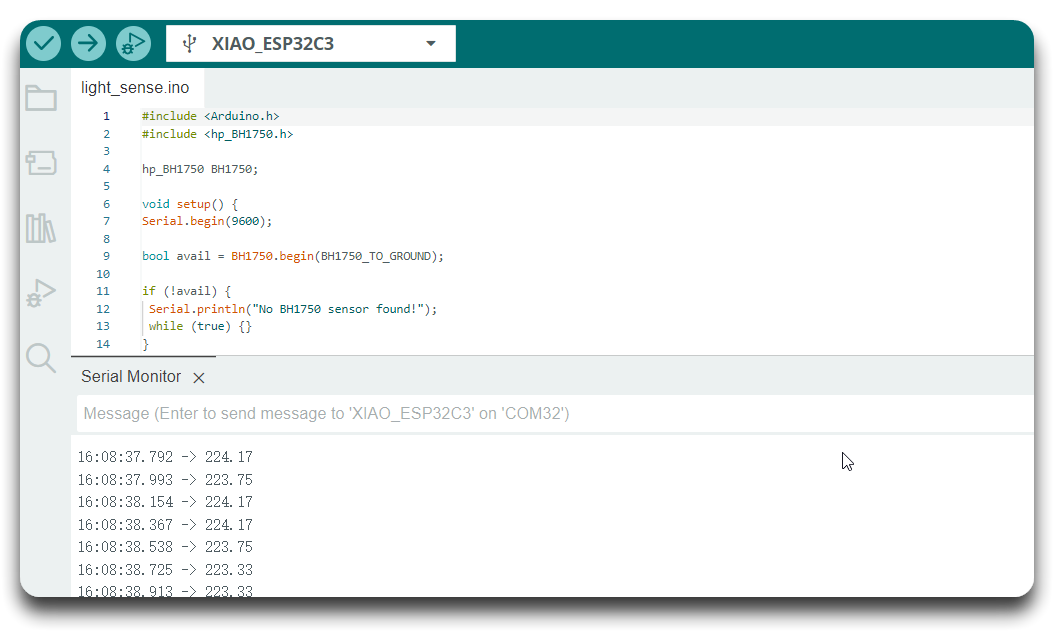
光传感器 (BH1750)
此示例展示如何使用BH1750传感器读取光强度值。
- 步骤 1. 下载
hp_BH1750库
导航到 Sketch > Include Library > Manage Libraries...,搜索 hp_BH1750,安装最新版本。
- 步骤 2. 将以下代码复制到新的草图中:
#include <Arduino.h>
#include <hp_BH1750.h>
hp_BH1750 BH1750;
void setup() {
Serial.begin(9600);
bool avail = BH1750.begin(BH1750_TO_GROUND);
if (!avail) {
Serial.println("No BH1750 sensor found!");
while (true) {}
}
Serial.printf("conversion time: %dms\n", BH1750.getMtregTime());
BH1750.start();
}
void loop() {
if (BH1750.hasValue()) {
float lux = BH1750.getLux();
Serial.println(lux);
BH1750.start();
}
}
- 步骤 3. 选择正确的开发板和端口号来上传程序。
Arduino 串口监视器的输出如下:
跌倒模块 API
此示例使用 SEEED_MR60FDA2 类与 MR60FDA2 传感器接口进行跌倒检测。以下是每个关键函数的功能:
-
mmWave.begin(&mmWaveSerial):- 初始化传感器进行通信,建立 XIAO 开发板与 MR60FDA2 传感器之间的串口连接。
-
mmWave.setInstallationHeight(float height):- 设置雷达的安装高度,这对准确的跌倒检测至关重要。
height参数指定传感器安装的高度(以米为单位),初始化设置参数为2.2 m,有效范围通常在 1 到 5 米之间。
- 设置雷达的安装高度,这对准确的跌倒检测至关重要。
-
mmWave.setThreshold(float threshold):- 设置跌倒检测阈值。雷达的默认跌倒阈值为
0.6 m。此值根据距离传感器的高度和距离确定雷达检测跌倒的灵敏度。
- 设置跌倒检测阈值。雷达的默认跌倒阈值为
-
mmWave.setSensitivity(uint32_t sensitivity):- 调整雷达跌倒检测的灵敏度。灵敏度初始值为
3,表示 3 帧数据的平均值。典型值范围从 3 到 10,数值越高使传感器对潜在跌倒的响应越敏感。
- 调整雷达跌倒检测的灵敏度。灵敏度初始值为
-
mmWave.getRadarParameters(float &height, float &threshold, uint32_t &sensitivity):- 检索雷达的当前配置参数,包括安装高度、跌倒检测阈值和灵敏度设置。这些参数通过引用变量返回。
-
mmWave.getHuman():- 检查雷达是否检测到人体存在。如果检测到人体则返回
true,否则返回false。
- 检查雷达是否检测到人体存在。如果检测到人体则返回
-
mmWave.getFall():- 确定是否检测到跌倒。如果检测到跌倒,此函数返回
true,如果没有则返回false。
- 确定是否检测到跌倒。如果检测到跌倒,此函数返回
模块固件升级
修改雷达固件是一项有风险的操作,因此请务必仔细阅读本节内容,然后仔细按照每个步骤进行操作。请注意,如果某个步骤执行不正确,雷达可能会变砖或无法使用。
特别注意,如果您购买的是雷达 MR60BHA2,请不要通过以下方式非法刷写固件,这肯定会使您的设备变砖!!!!
首先,将 XIAO ESP32C6 和 MR60FDA2 模块连接在一起。然后使用以下代码对 XIAO 进行编程。
#include <Arduino.h>
#include "Seeed_Arduino_mmWave.h"
// If the board is an ESP32, include the HardwareSerial library and create a
// HardwareSerial object for the mmWave serial communication
#ifdef ESP32
# include <HardwareSerial.h>
HardwareSerial mmWaveSerial(0);
#else
// Otherwise, define mmWaveSerial as Serial1
# define mmWaveSerial Serial1
#endif
void setup() {
// Initialize the serial communication for debugging
Serial.begin(115200);
while (!Serial) {
; // Wait for Serial to initialize
}
// Initialize the mmWaveSerial communication
mmWaveSerial.begin(115200);
}
void loop() {
// Check if there is data available from mmWaveSerial
while (mmWaveSerial.available() > 0) {
char receivedChar = mmWaveSerial.read();
Serial.write(receivedChar); // Forward data to Serial
}
// Check if there is data available from Serial
while (Serial.available() > 0) {
char receivedChar = Serial.read();
mmWaveSerial.write(receivedChar); // Forward data to mmWaveSerial
}
}
上述代码的功能是将模块的串口透明传输到 XIAO 的 USB 串口,从而通过 XIAO 升级模块的固件。
请在升级过程中将 XIAO 连接到您的 PC。
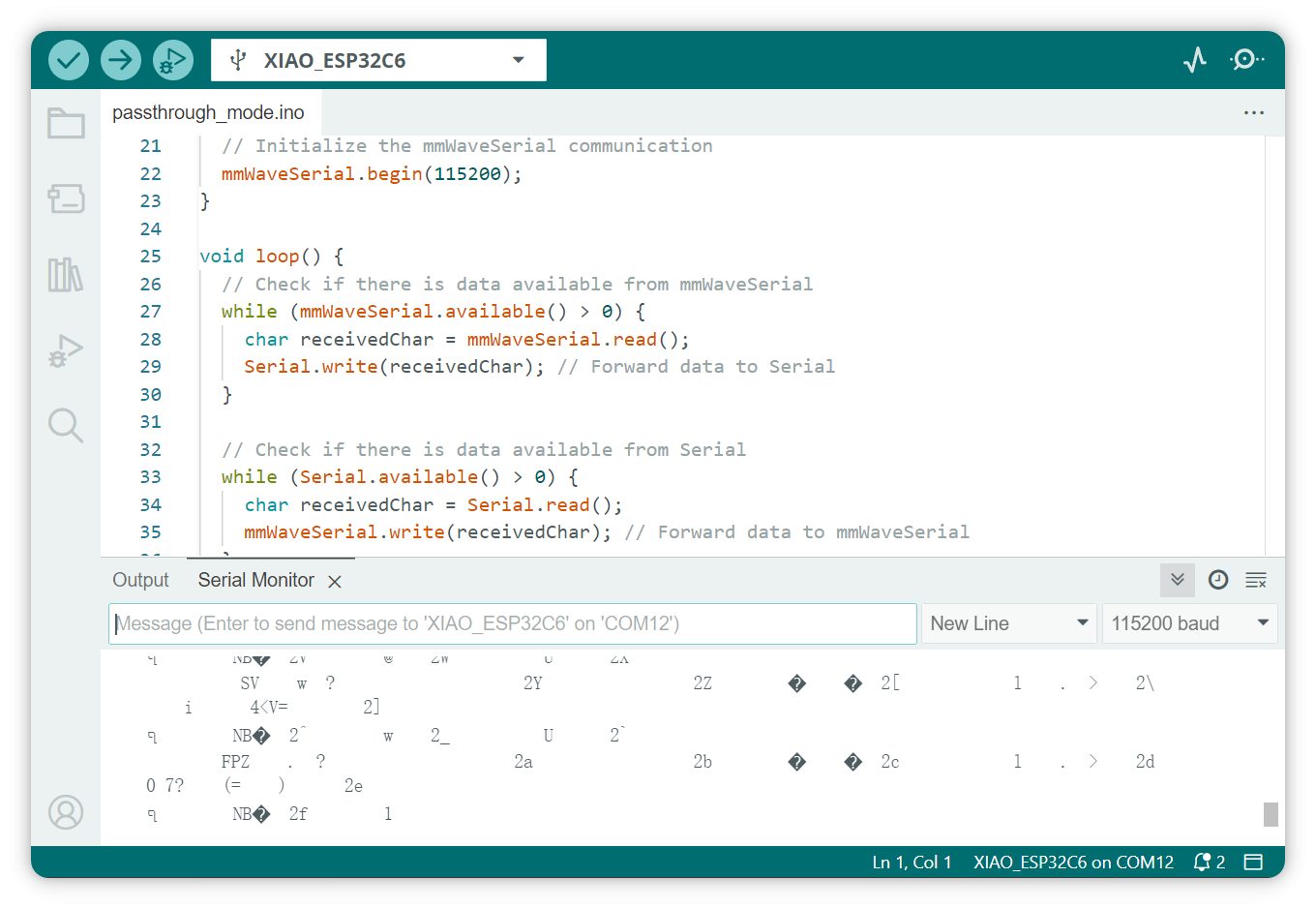
您将看到模块发送的原始数据。
然后您需要在此处下载并解压 OTA 工具和固件。
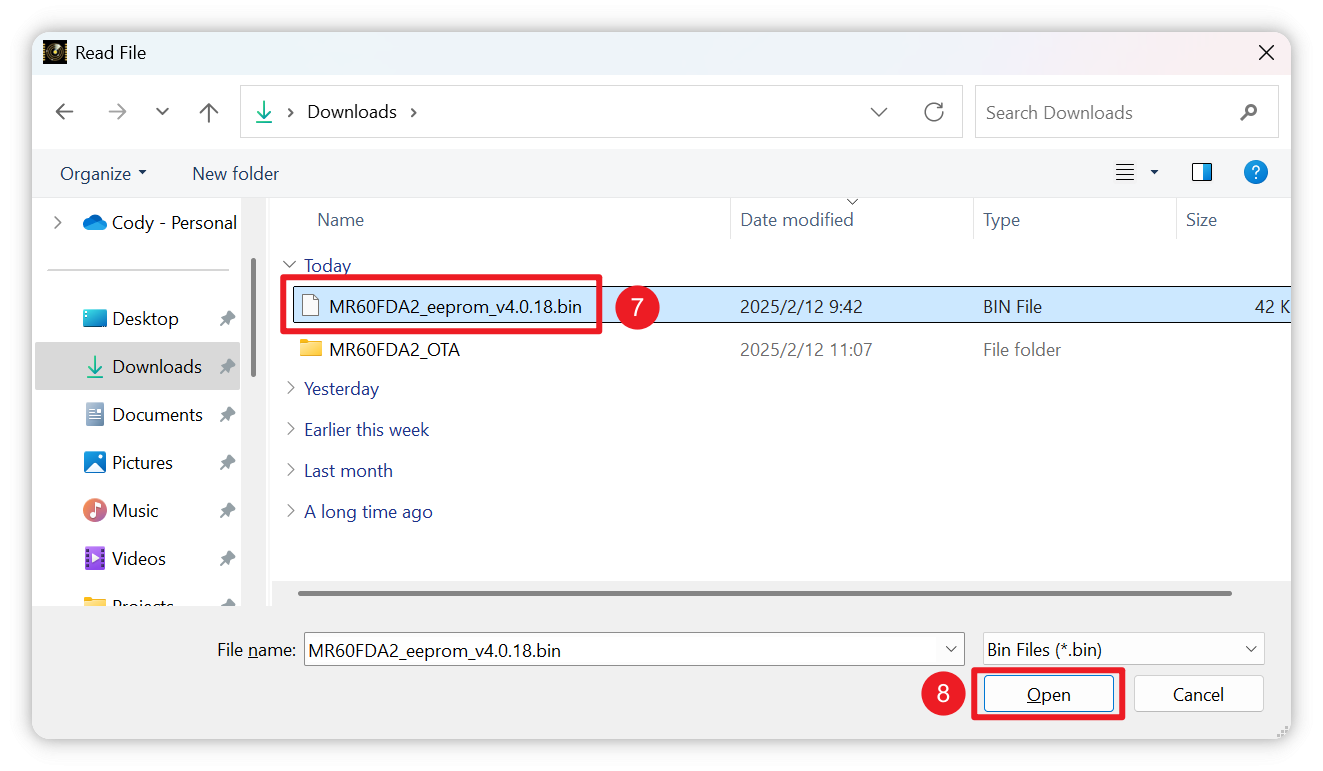
- MR60FDA2 固件升级工具: MR60FDA2_OTA.zip
- MR60FDA2 固件 v4.0.18: MR60FDA2_eeprom_v4.0.18.bin
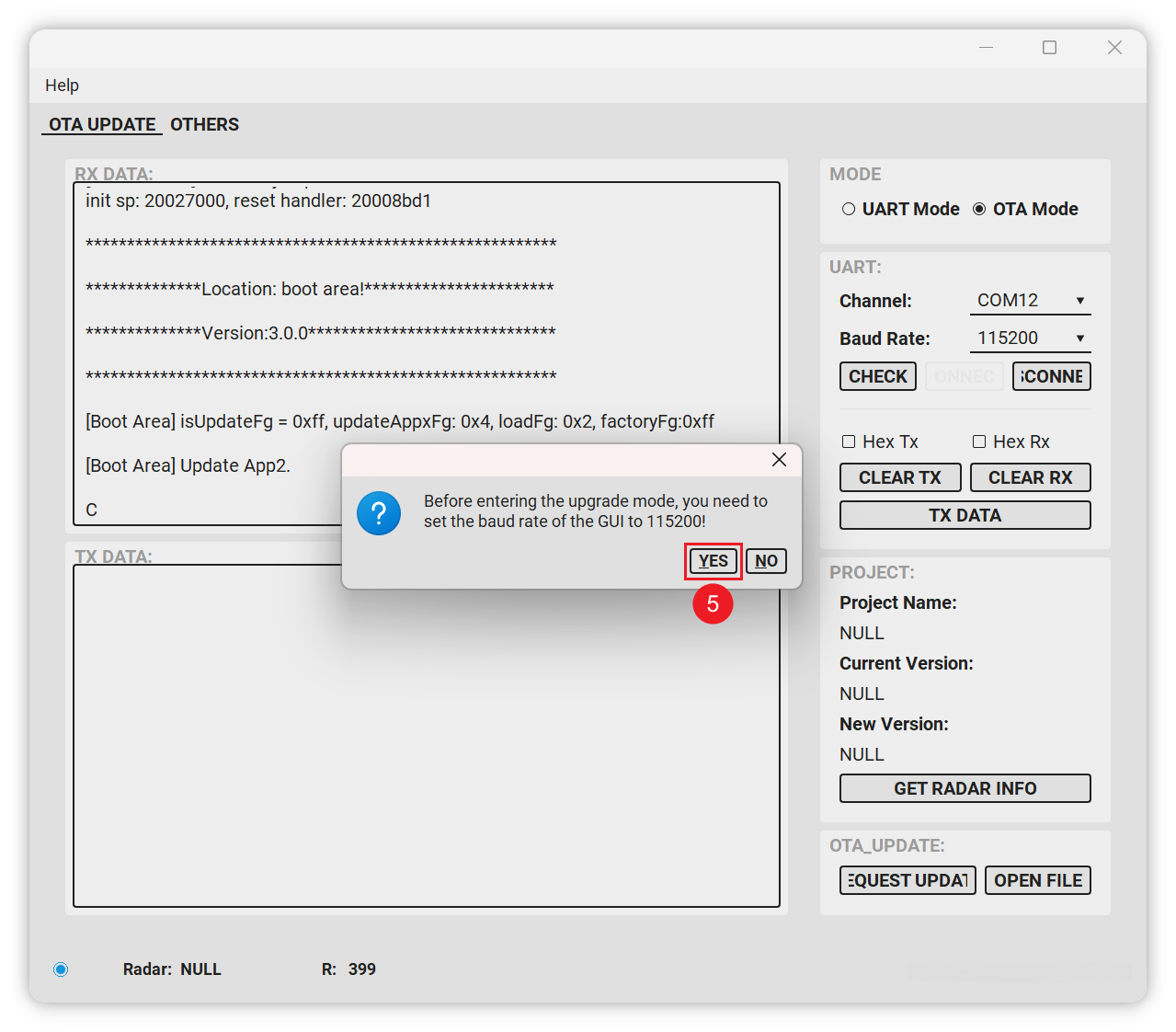
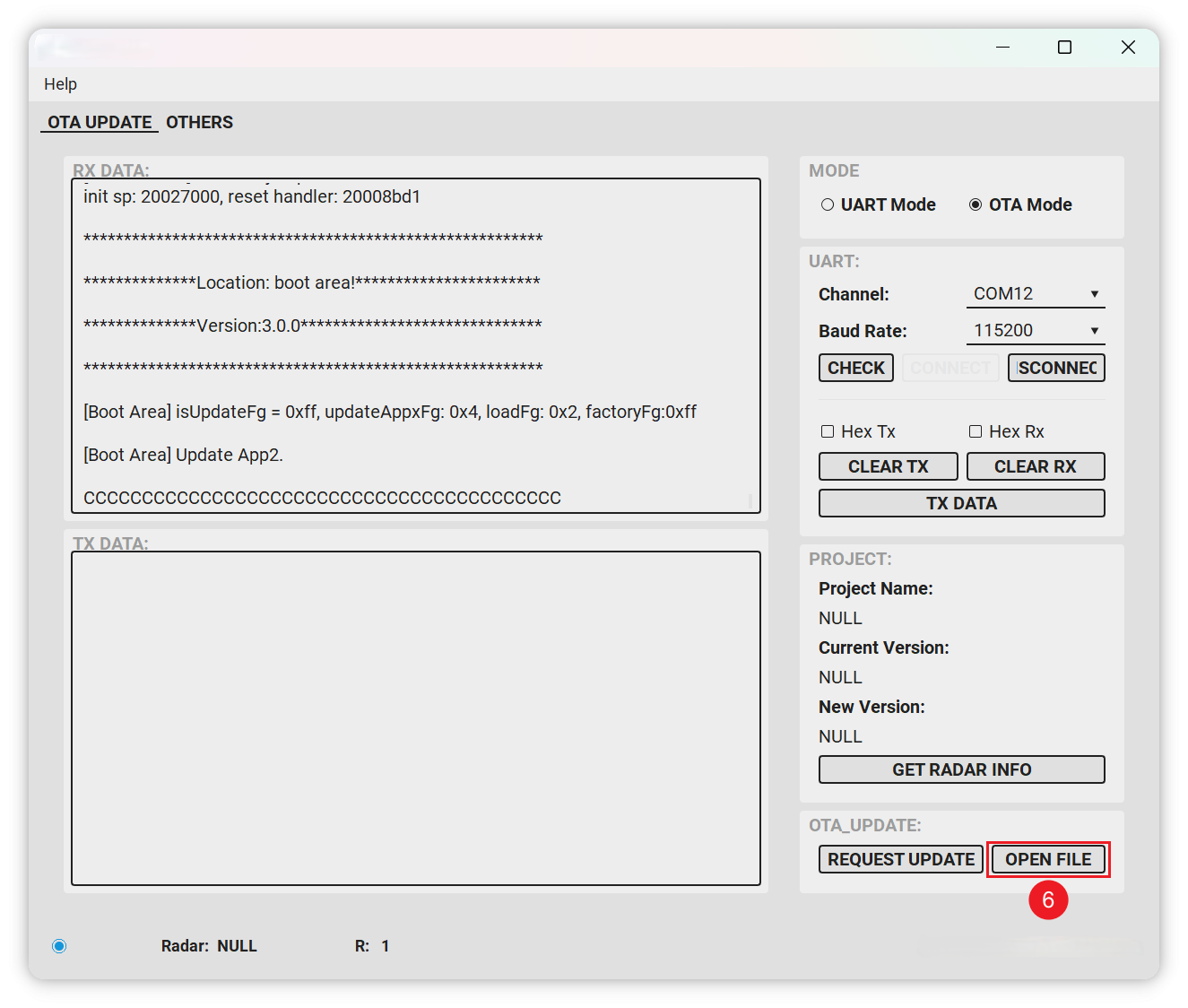
- 检查并连接到串口(将波特率设置为 115200)
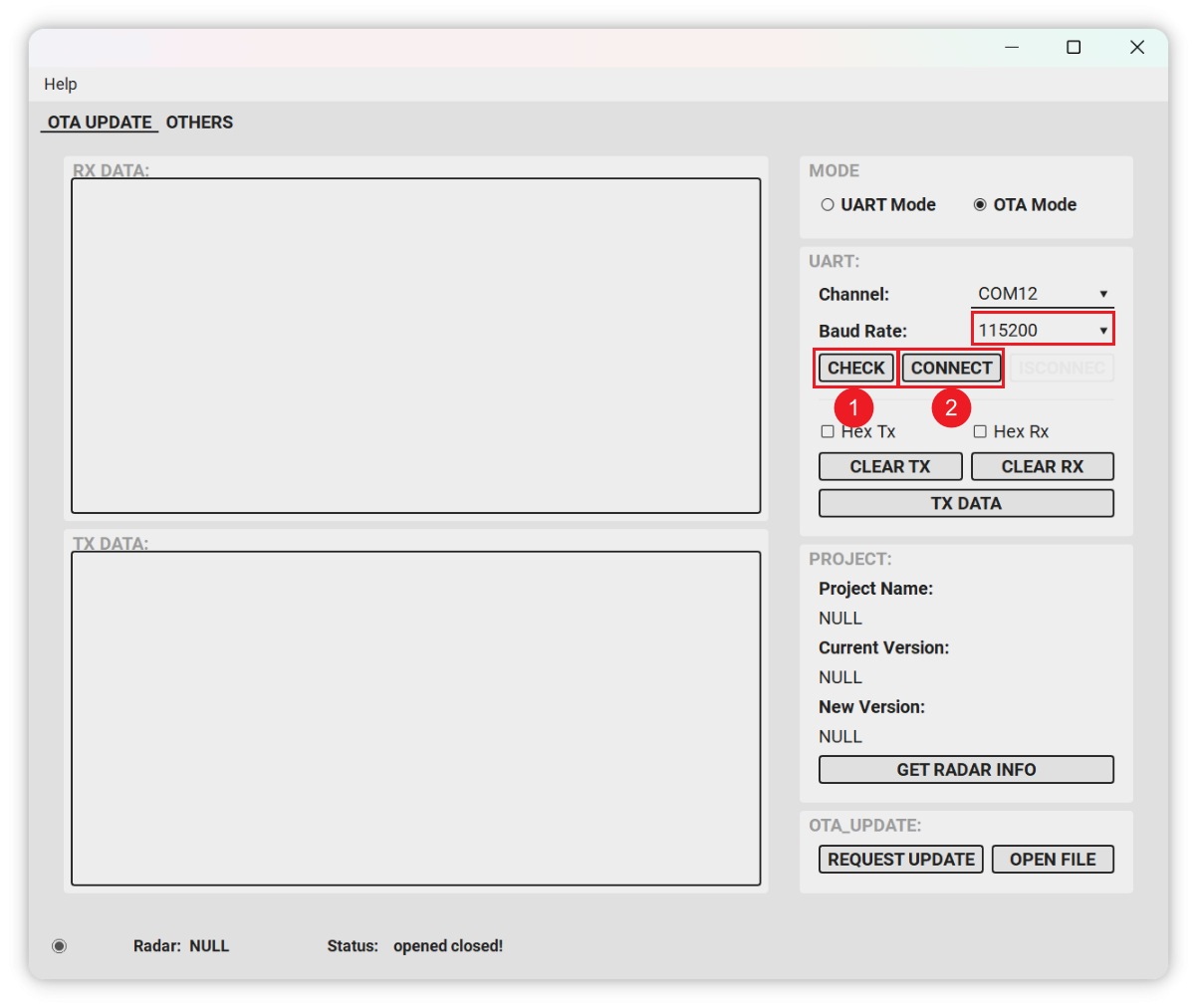
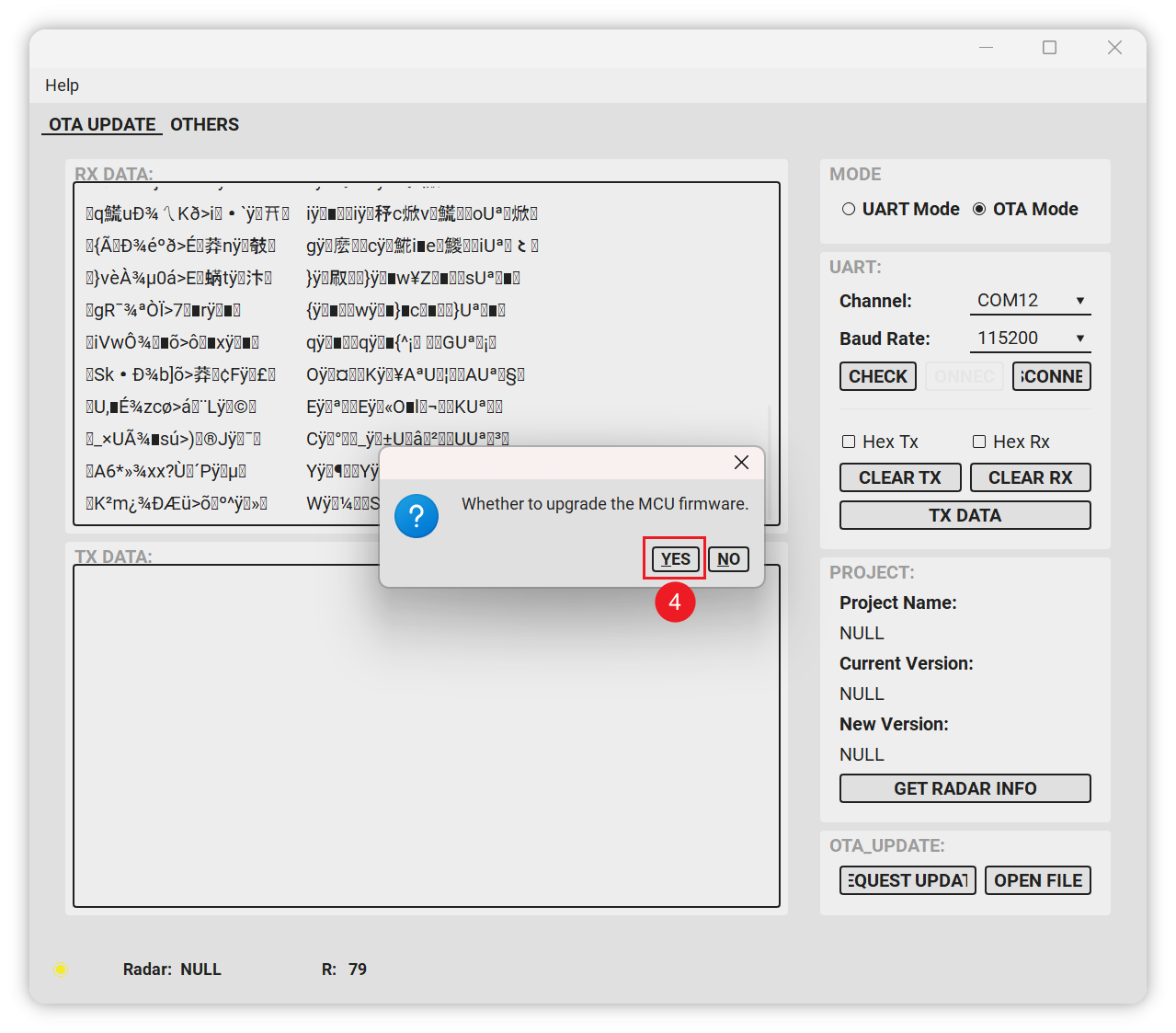
- 点击 "REQUEST UPDATE" 进入升级模式:
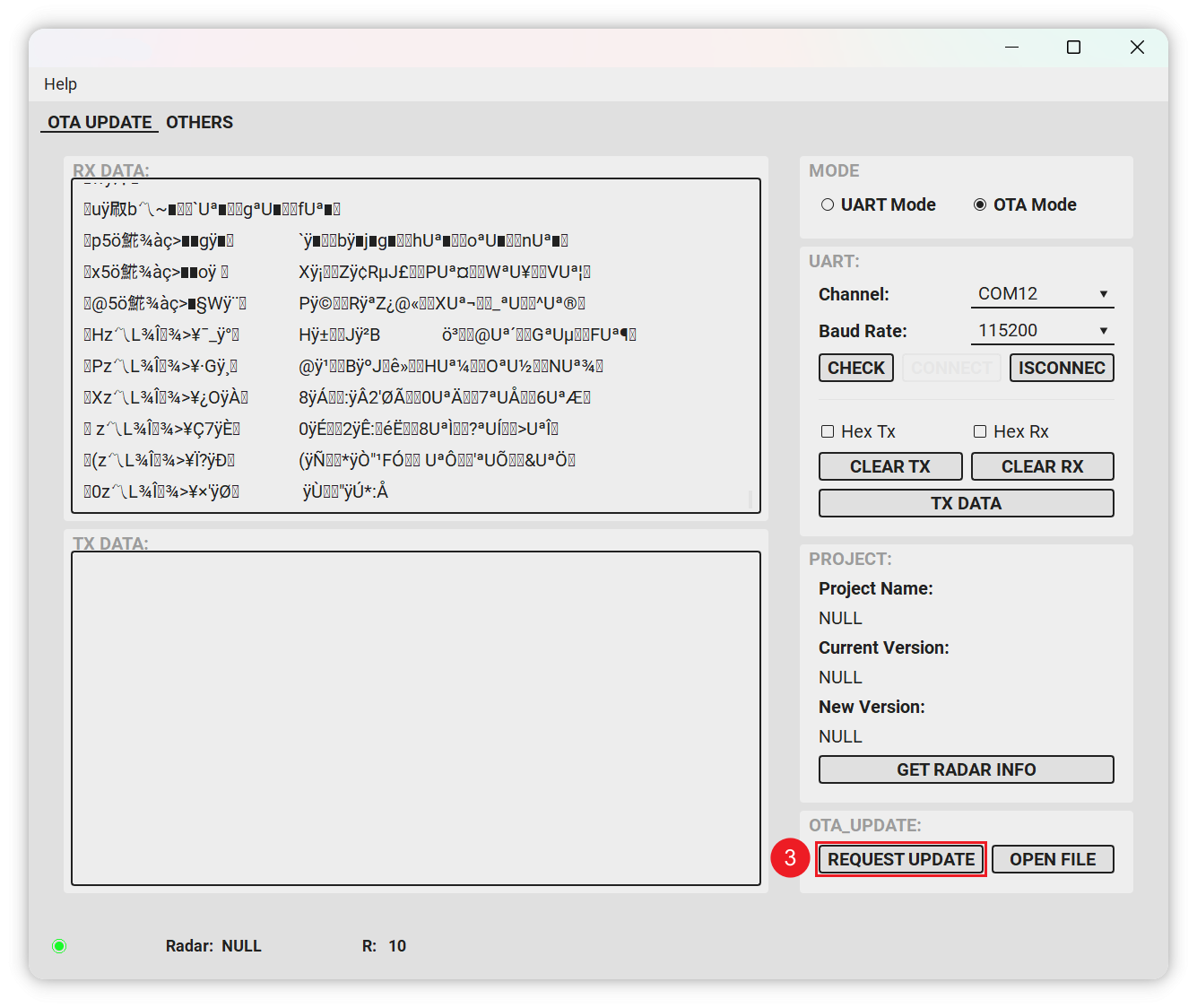
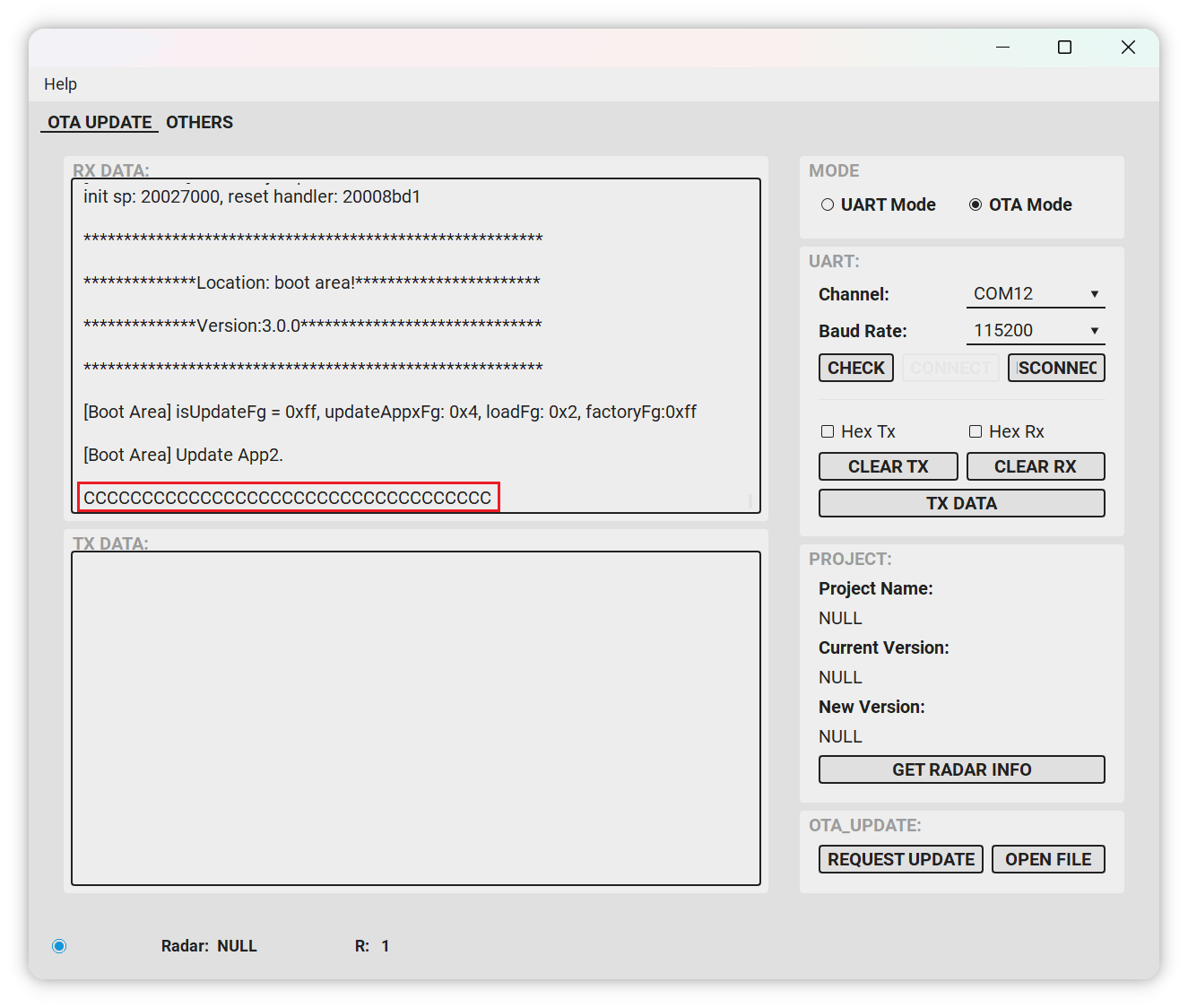
- 如果打印出 "C" 或 "43",表示模块已进入升级模式。
- 选择要升级的固件。选择后,将自动进入升级状态。
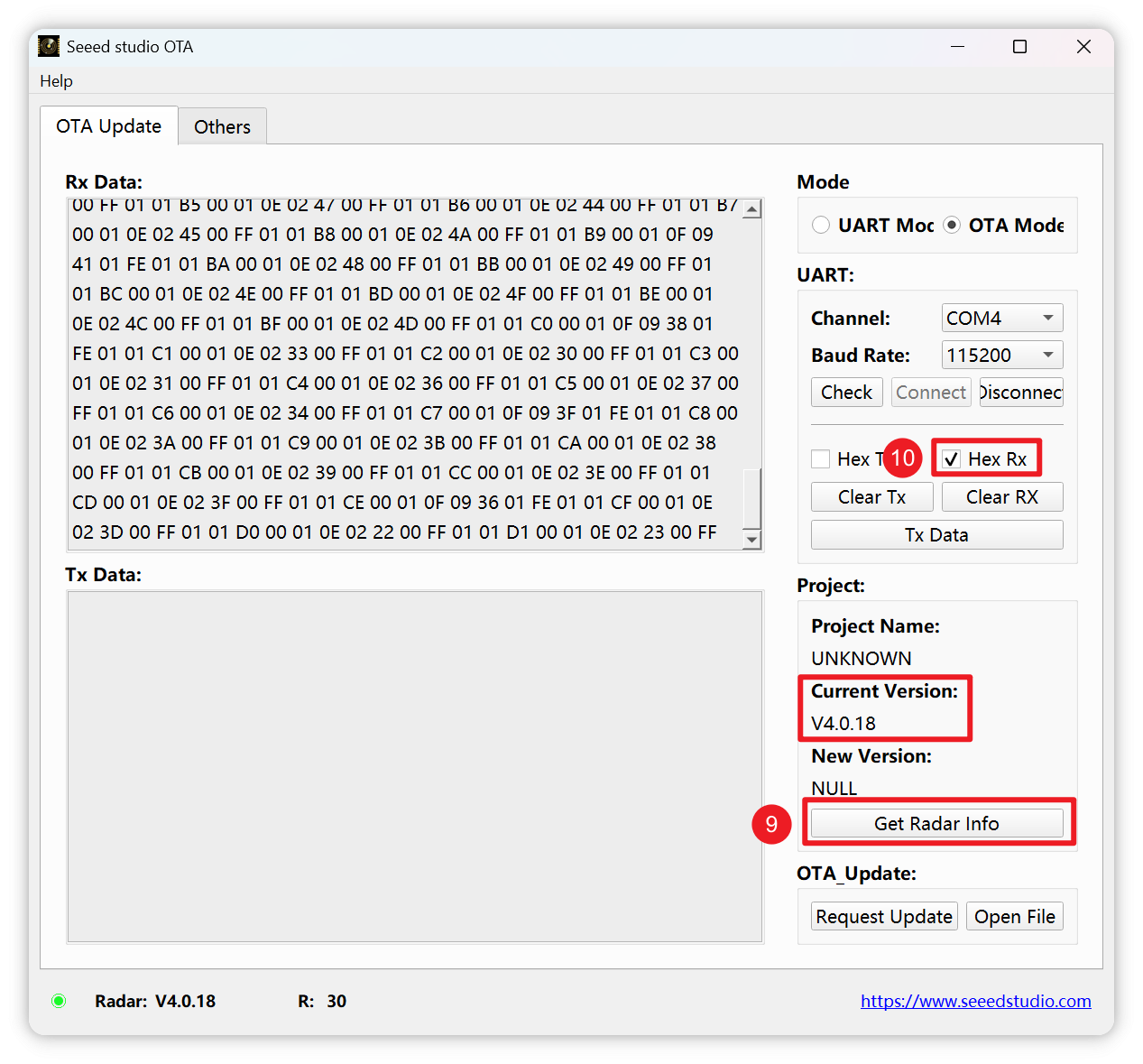
升级完成后,将自动跳转到正常模式。如果没有跳转,请断电重启,然后使用 OTA 工具查看串口数据。
- 升级完成后,您可以使用 OTA 工具读取版本和原始数据。
- 升级完成后,您需要重新刷写 XIAO ESP32C6 的固件。
如果在上述步骤中您操作不当导致异常发生,并且一直无法尝试重新烧录固件且雷达无法正常工作,那么雷达可能由于固件损坏而变砖。尝试恢复设备的唯一方法是参考**此处**的文件和文档。但是,请理解我们不为因操作不当而导致的设备变砖提供技术支持和协助。
开放定制化
想要定制套件以适应您的独特应用?
有关定制毫米波模块时的3D点云数据生成和干扰区域配置的更多信息。Seeed提供一站式研发定制和制造服务,助力从概念到生产的快速开发。请联系我们:[email protected] 了解更多信息。
雷达的固件和算法不开源,雷达的复杂参数如跌倒高度设置、安装位置设置等需要定制服务,这可能涉及额外的定制费用和最小起订量。
资源
- STL: 毫米波3D外壳
- GitHub仓库: 在Seeed毫米波库GitHub页面访问完整代码库和文档。
- ESPHome文档: 有关进一步定制和集成,请参考ESPHome文档。
- MR60FDA2固件升级工具: MR60FDA2_OTA.zip
- MR60FDA2固件v4.0.18: MR60FDA2_eeprom_v4.0.18.bin
- MR60FDA2 GUI软件: Seeed_Studio_mmWave_Sensor_MR60FDA2_GUI.zip
- 毫米波传感器原理图V1.0: mmWave_Sensor_SCH_V1.0.pdf
- MR60FDA2模块技术规格: MR60FDA2_Fall_Detection_Module_Datasheet.pdf
- MR60FDA2 Tiny Frame接口手册: Seeed_Studio_TinyFrame_Interface_Fall_detection_V1.1.pdf
- 通过Jlink的雷达固件恢复方法: Radar_Firmware_Recovery_Method-Jlink.zip
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。