Grove 智能红外手势传感器 (PAJ7660)
简介
Grove 智能红外手势传感器是一款智能手势识别模块,配备红外摄像头传感器并应用 AI 算法。它可以检测超过 15 种手势,具有广泛的检测范围,同时支持 IIC 和 SPI 通信。该模块还支持 Grove、Type-C 和 Seeed Studio XIAO 直接连接。
特性
- 紧凑型 AI 手势传感器:配备红外摄像头传感器并应用 AI 算法实现手势检测,尺寸紧凑,仅为 4.3cm x 2.1cm
- 超过 15 种手势,检测范围广:支持多种手势,如 N 指推、捏合、点击、抓取、旋转、大拇指上下、静态等,检测范围为 5-40cm
- 高兼容性:通过 I2C 通信兼容 XIAO 系列接口和 Grove 连接器,同时支持通过 SPI 通信在 PC 上显示图像
- 灵活的电压选择:Grove 接口兼容 3.3V 和 5V 系统
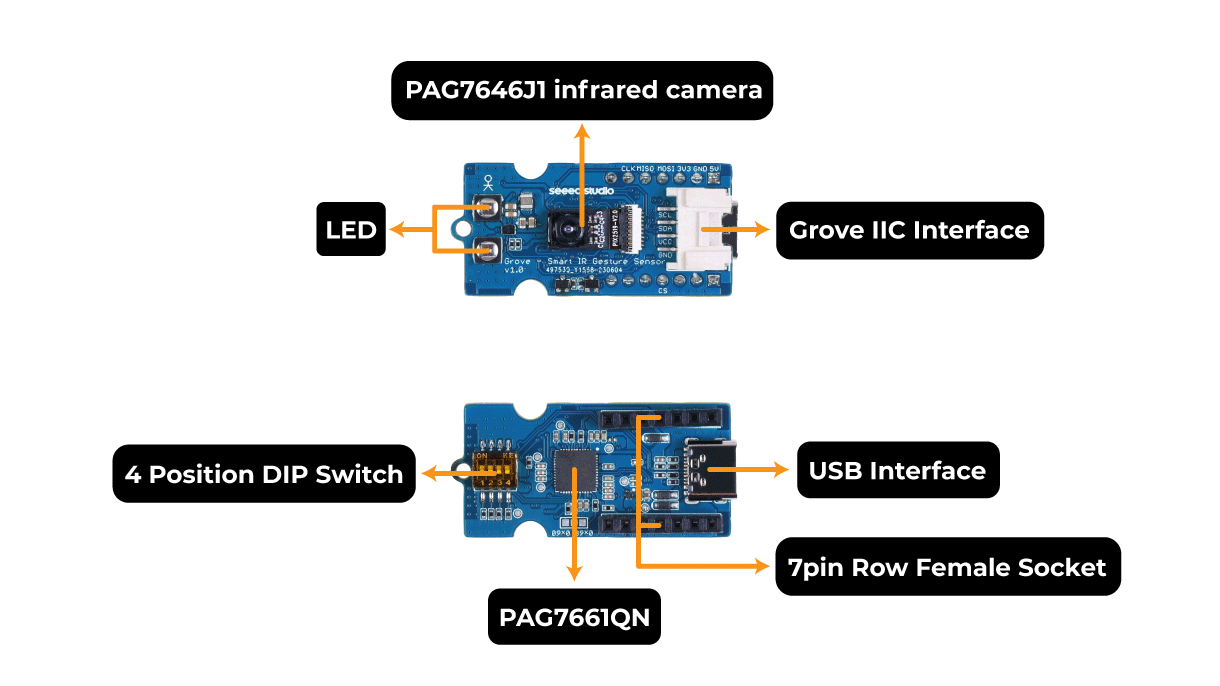
硬件概览
入门指南
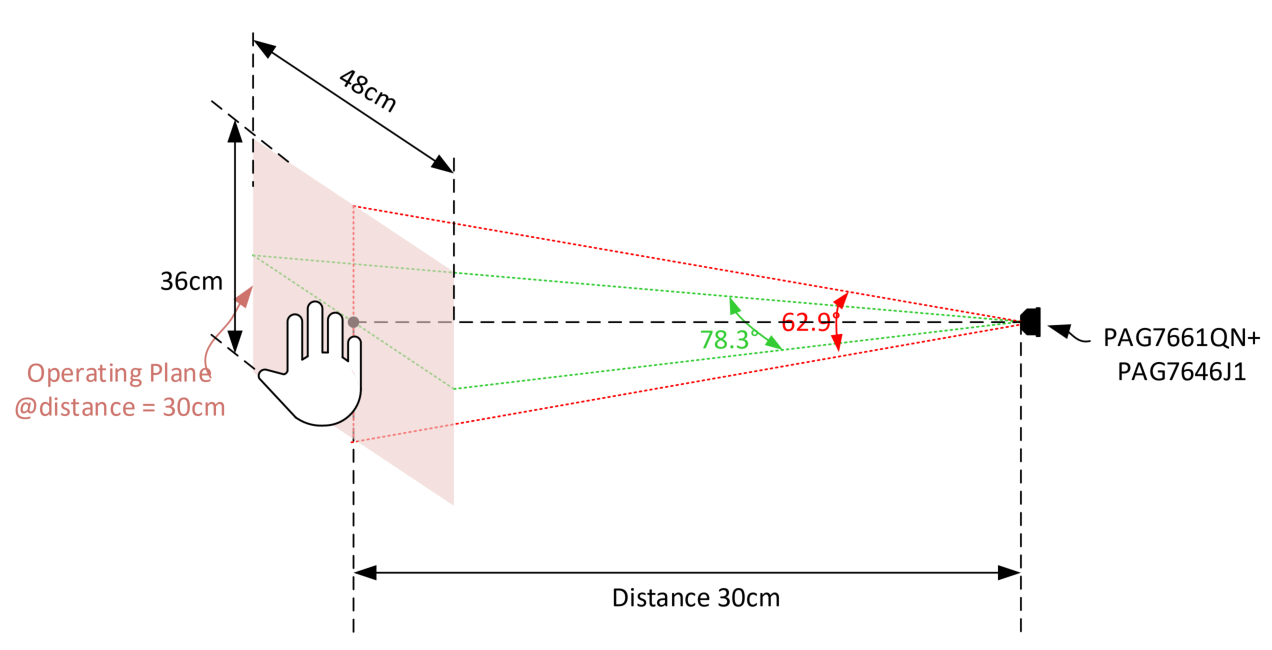
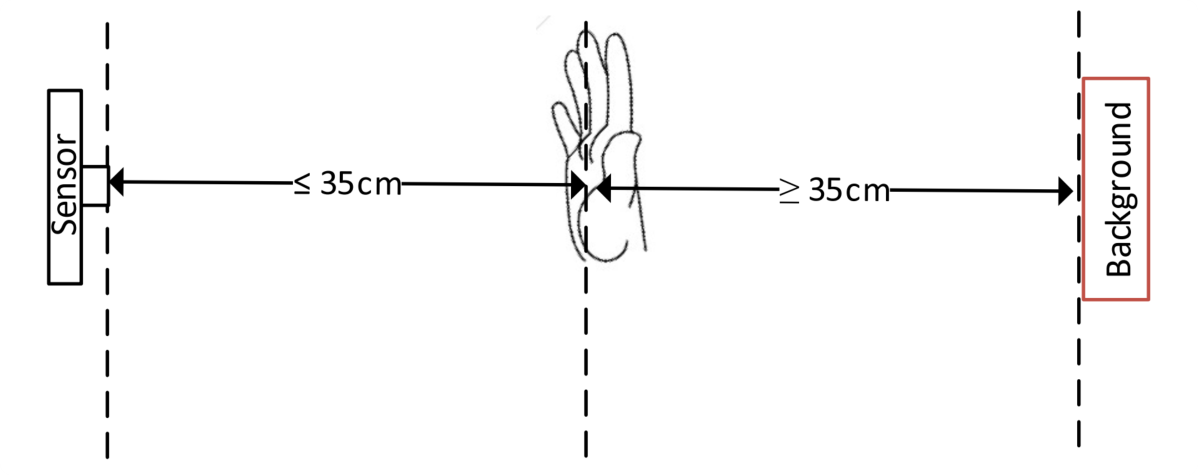
操作平面
手势操作距离为 15 至 30 cm,最远不能超过 35 cm。基于传感器 FOV 78.3°(水平)和 62.9°(垂直),操作区域在 30 cm 处为 48 x 36 cm²。
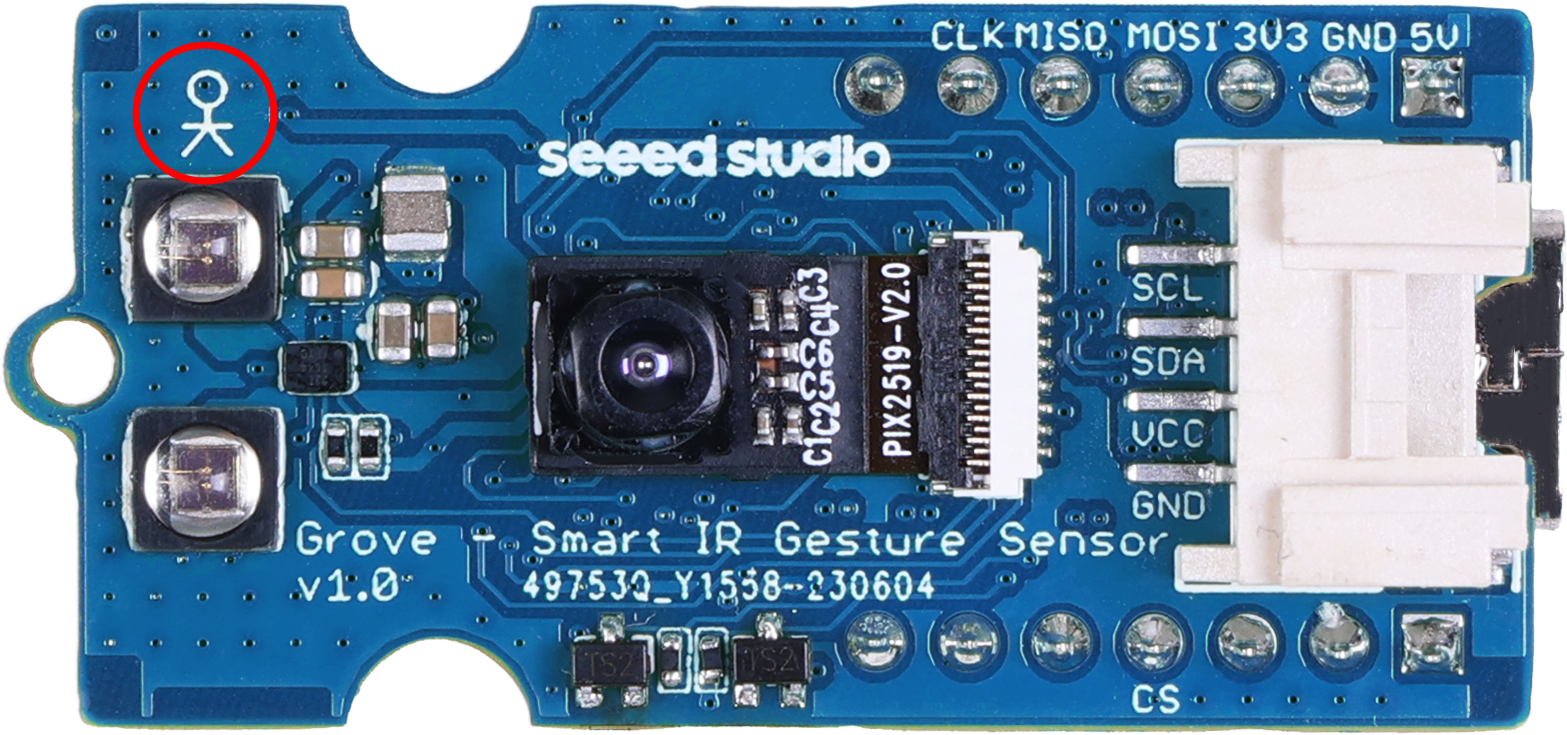
除了传感器的距离外,还需要注意传感器的放置位置。在传感器的正面左上角有一个小人形标志。如果看到人形直立,则表示放置正确。如果是倒置的,则可能无法获得准确的识别结果。
背景干扰
由于背景噪声可能影响手势识别的准确性,建议避免手掌后方存在反射较高的背景物体。在正常手势识别条件下,建议手掌与背景之间至少保持 35cm 的距离。
手势类型
以下部分描述了所有支持的手势类型。
手势定义
| 手势 | 描述 | 备注 |
|---|---|---|
| N 指 (N=0~5) | 拳头顶部的 0 ~ 5 根手指  | 操作距离 15 至 30 cm 静态 |
| N 指推 (N=1~5) | N 根手指向传感器方向移动  | 操作距离 15 至 30 cm 可编程阈值 |
| 捏合 | 两指靠近捏合,打开释放  | 操作距离 15 至 30 cm 可使用手掌中心坐标作为光标并报告捏合结果 |
| 顺时针/逆时针旋转 | 手腕以圆形模式移动  | 操作距离 15 至 30 cm 可设置手势检测角度,可报告角度值 |
| 手向右或向左滑动 | 双手向相反方向滑动一段距离  | 操作距离 15 至 30 cm 可编程阈值 |
| 点击 | 单指点击(手指消失)  | 操作距离 15 至 30 cm 可使用手掌中心坐标作为光标 |
| 抓取 | 5 指变为 0 指  | 操作距离 15 至 30 cm 可使用手掌中心坐标作为光标 报告抓取结果 |
| 大拇指向上 | 拳头顶部的大拇指  | 操作距离 15 至 25cm |
| 大拇指向下 | 拳头底部的大拇指  | 操作距离 15 至 25cm |
手势操作模式
共有 3 种手势模式:拇指模式、光标模式和手势模式。每种模式定义了特定的手势类型,以适应某些用户场景或应用。默认的组合模式包含除拇指手势外的所有手势。
| 模式 | 默认连接 | 手势类型 |
|---|---|---|
| 2 | 拇指模式 | 拇指向上/向下 |
| 4 | 光标模式 | 静态手指 推动 旋转 点击 捏合 抓取 |
| 5 | 手势模式(默认) | 静态手指 推动 滑动 旋转 点击(IS_SELECT 标志 = 1) 捏合(IS_SELECT 标志 = 1) 抓取(IS_SELECT 标志 = 1) |
硬件类型
Grove 智能红外手势传感器支持多种通信协议,包括 IIC、SPI 和 USB。不同模式可通过背面的 4 位 DIP 开关直接选择。
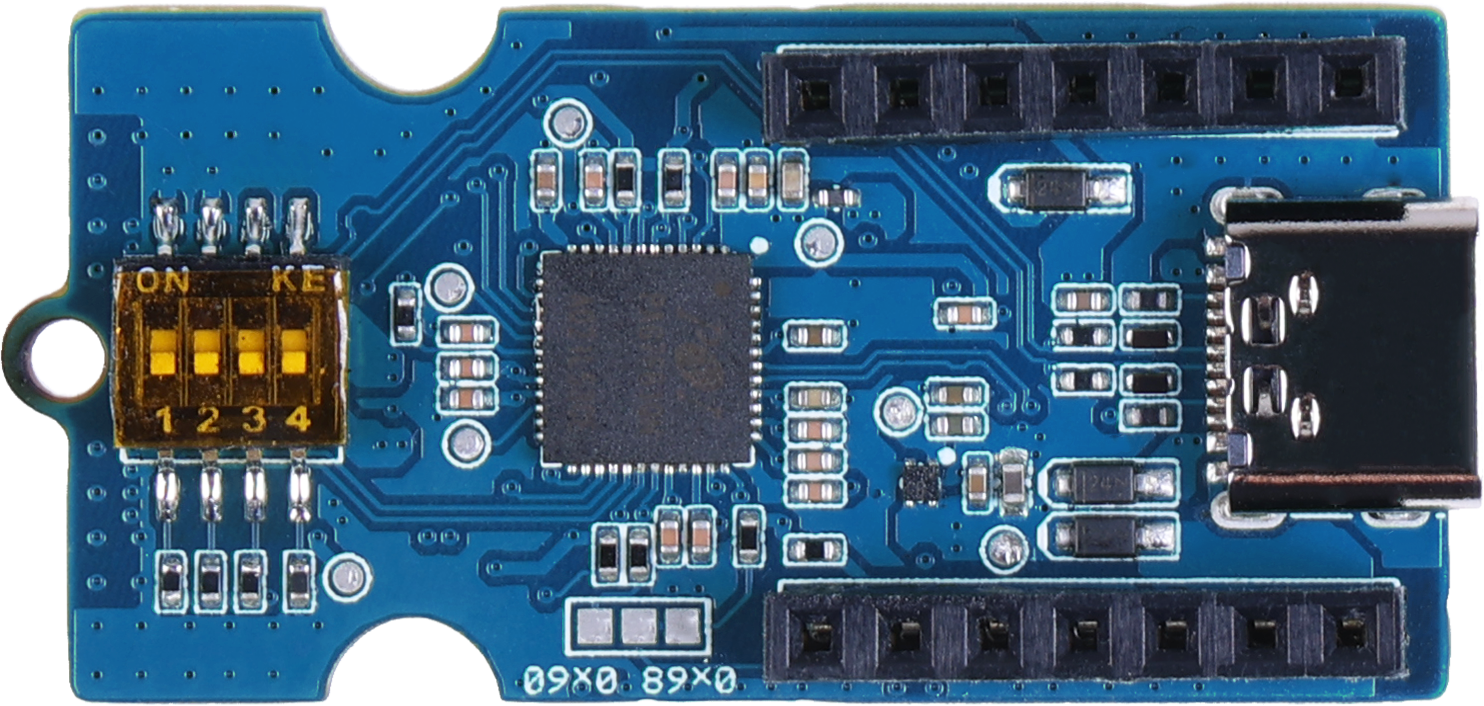
下图和表格将展示如何使用 4 位 DIP 开关选择您希望使用的模式。
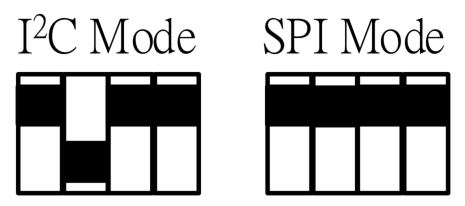
| 1 | 2 | 3 | 4 | |
|---|---|---|---|---|
| I2C 模式 | ON | OFF | ON | ON |
| SPI 模式 | ON | ON | ON | ON |
| USB 模式 | OFF | OFF | OFF | OFF |
使用不同模式时,接线和代码可能会略有不同。我们将在后续示例中详细说明。
使用上位机软件
如果您希望通过 USB 数据线将 Grove 手势传感器连接到计算机,并实时查看识别结果,那么使用上位机软件是您的最佳选择。
步骤 1. 下载并打开软件
您可以通过点击 这里 下载软件的 zip 文件。然后,请解压下载的 zip 文件,打开解压后的 GestureDemo_220620_Customer 文件夹,并双击运行 GestureDemo_220620_Customer.exe 文件。
此时可能会弹出一个错误窗口,提示未找到手势传感器。我们可以直接关闭错误消息。
步骤 2. 将 Grove 手势传感器连接到 PC
接下来,请确保 Grove 手势传感器处于 USB 模式,将 4 位 DIP 开关全部调至 OFF。
然后使用高质量的数据线,将 Grove 手势传感器的 USB-C 接口连接到计算机的 USB 接口。
步骤 3. 在软件中查看结果
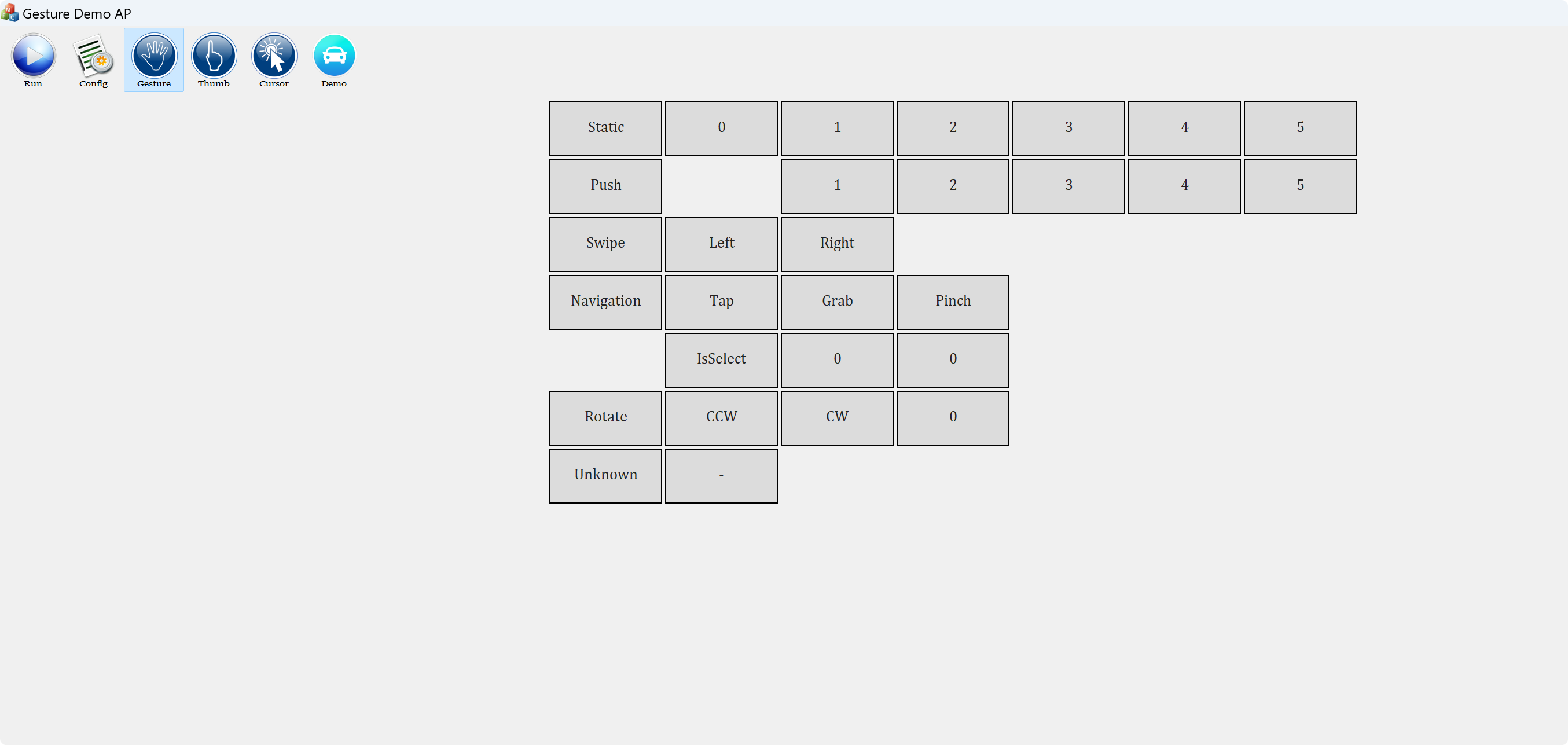
连接到计算机后,我们点击软件左上角的 Run 按钮,然后选择 Gesture 模式以实时查看结果。
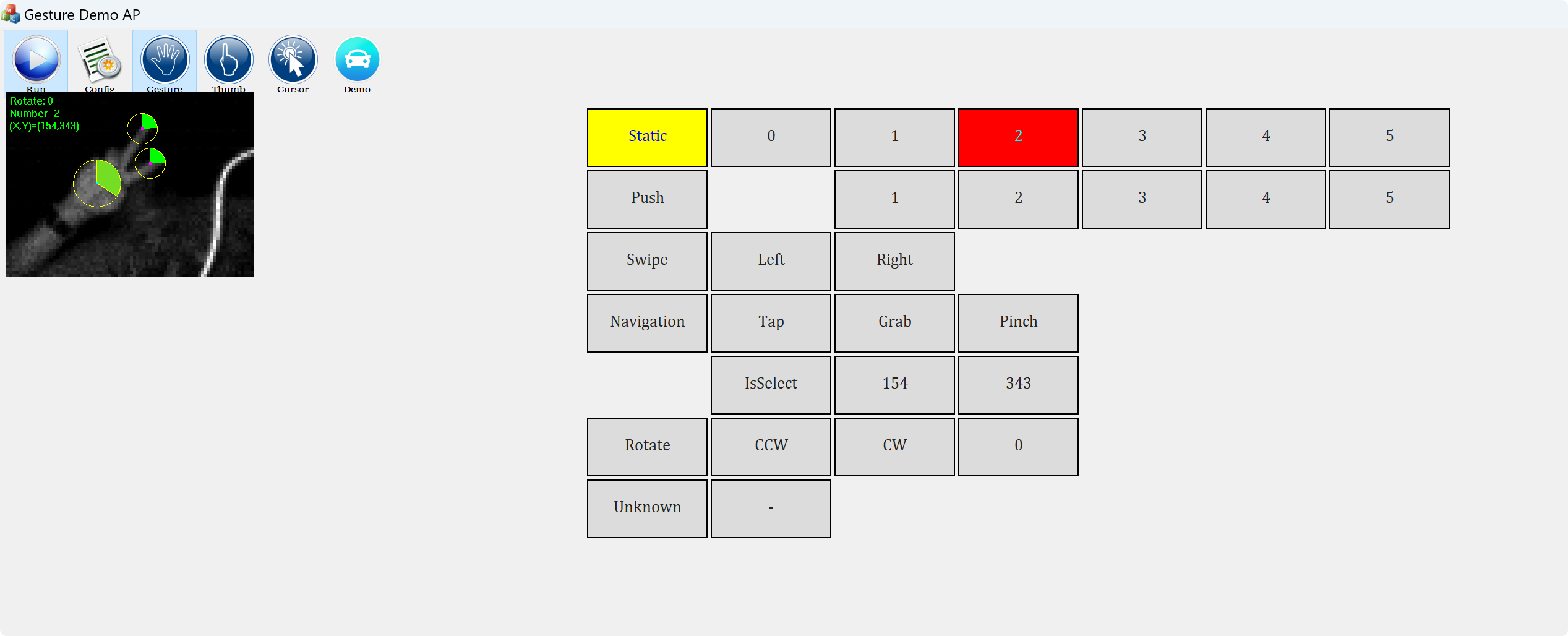
手势类型及其介绍可以在 前面的部分 中找到。
Arduino 库概述
如果这是您第一次使用 Arduino,我们强烈建议您参考 Arduino 入门指南。
功能
在开始开发代码之前,让我们先了解一下该库的可用功能。
-
bool init()—— 此函数用于初始化 Grove 手势传感器。如果初始化成功,返回 True;如果失败,返回 False。 -
bool getResult(paj7620_gesture_t& res)—— 此函数用于获取传感器识别手势的结果。
安装
下载 ZIP 库文件后,打开 Arduino IDE,点击 Sketch > Include Library > Add .ZIP Library。选择刚刚下载的 ZIP 文件,如果库安装成功,您会在通知窗口中看到 Library added to your libraries,这表示库已成功安装。

示例 1:通过 IIC 连接传感器到 MCU
第 1 步:将 4 位 DIP 开关拨到 IIC 位置
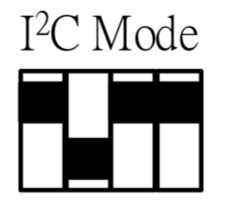
从左到右的第二个开关需要设置为 OFF,其他开关设置为 ON。
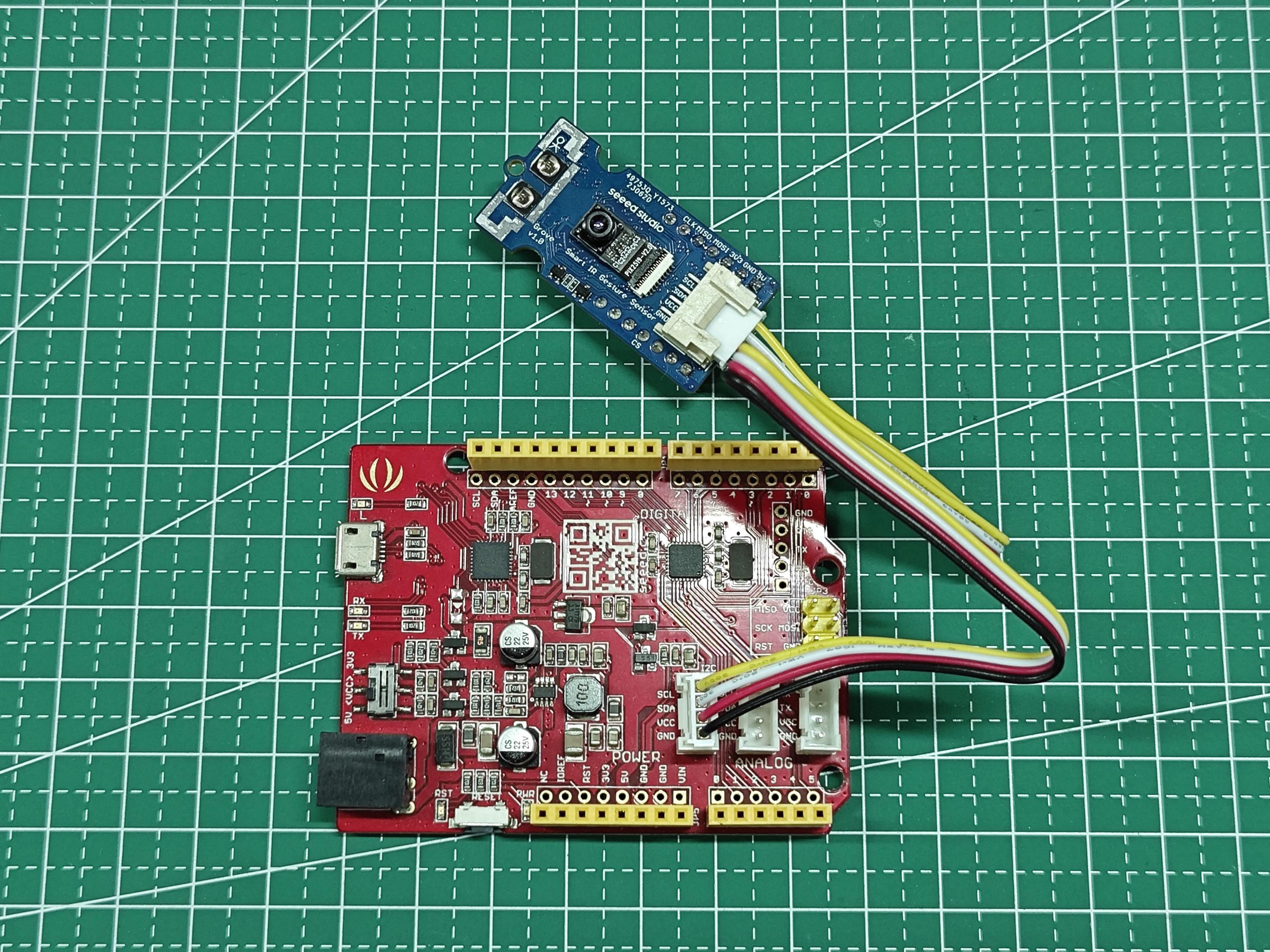
第 2 步:通过 Grove 电缆将 MCU 连接到 Grove 手势传感器
IIC 接口兼容 XIAO 系列和 Arduino/Seeeduino 系列。如果您使用的是 Arduino/Seeeduino,则可能需要使用 Grove 电缆连接到它们的 IIC 接口。
如果您使用的是 XIAO,那么操作非常简单,您只需直接将其插入 Grove 手势传感器的母接口即可使用。请注意,USB-C 接口始终朝外。
第 3 步:上传程序
将以下程序复制到 Arduino IDE 中,选择您使用的 XIAO 开发板,编译并上传程序。
代码 1:手势模式(默认)
#include "Gesture.h"
pag7660 Gesture; // 默认使用组合模式
void setup() {
Serial.begin(9600);
while(!Serial) {
delay(100);
}
Serial.println("\nPAG7660 测试示例:手势组合模式。");
if(Gesture.init()) {
Serial.println("PAG7660 初始化成功");
} else {
Serial.println("PAG7660 初始化失败");
}
Serial.println("请输入您的手势:\n");
}
void loop() {
pag7660_gesture_t result;
if (Gesture.getResult(result)) {
printResultCombinedMode(result);
}
delay(100);
}
void printResultCombinedMode(const pag7660_gesture_t& result) {
const char *cursor_str[] = {
NULL,
"点击",
"抓取",
"捏合",
};
switch (result.type) {
case 0:
switch (result.cursor.type) {
case 1:
case 2:
case 3:
if (result.cursor.select)
Serial.println(cursor_str[result.cursor.type]);
break;
default:
break;
}
break;
case 1:
case 2:
case 3:
case 4:
case 5:
Serial.print(result.type);
Serial.println("-指");
break;
case 6:
Serial.print("右旋 ");
Serial.println(result.rotate);
break;
case 7:
Serial.print("左旋 ");
Serial.println(result.rotate);
break;
case 8:
Serial.println("左滑");
break;
case 9:
Serial.println("右滑");
break;
case 19:
case 20:
case 21:
case 22:
case 23:
Serial.print(result.type - 19 + 1);
Serial.println("-指推");
break;
default:
break;
}
}
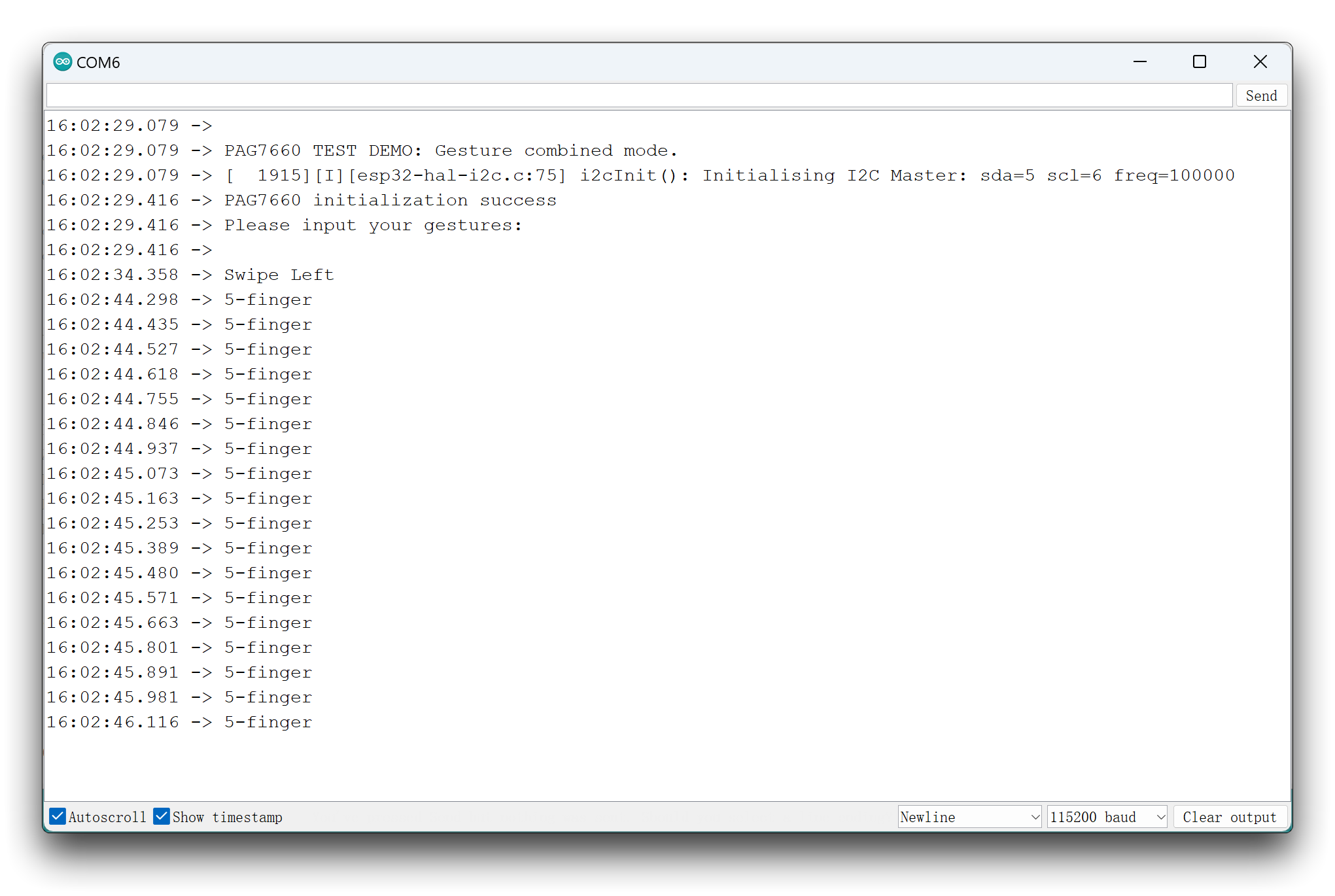
如果一切正常,直接对着 Grove 手势传感器做手势,它将在串口监视器中输出结果。
代码 2:拇指模式
#include "Gesture.h"
pag7660 Gesture(GESTURE_THUMB_MODE); // 使用拇指模式
void setup() {
Serial.begin(9600);
while(!Serial) {
delay(100);
}
Serial.println("\nPAG7660 测试示例:手势拇指模式。");
// 使用 SPI 初始化时需提供芯片选择引脚号
if(Gesture.init()) {
Serial.println("PAG7660 初始化成功");
} else {
Serial.println("PAG7660 初始化失败");
}
Serial.println("请输入您的手势:\n");
}
void loop() {
pag7660_gesture_t result;
if (Gesture.getResult(result)) {
if (result.thumb.up)
Serial.println("拇指向上");
else if (result.thumb.down)
Serial.println("拇指向下");
}
delay(100);
}
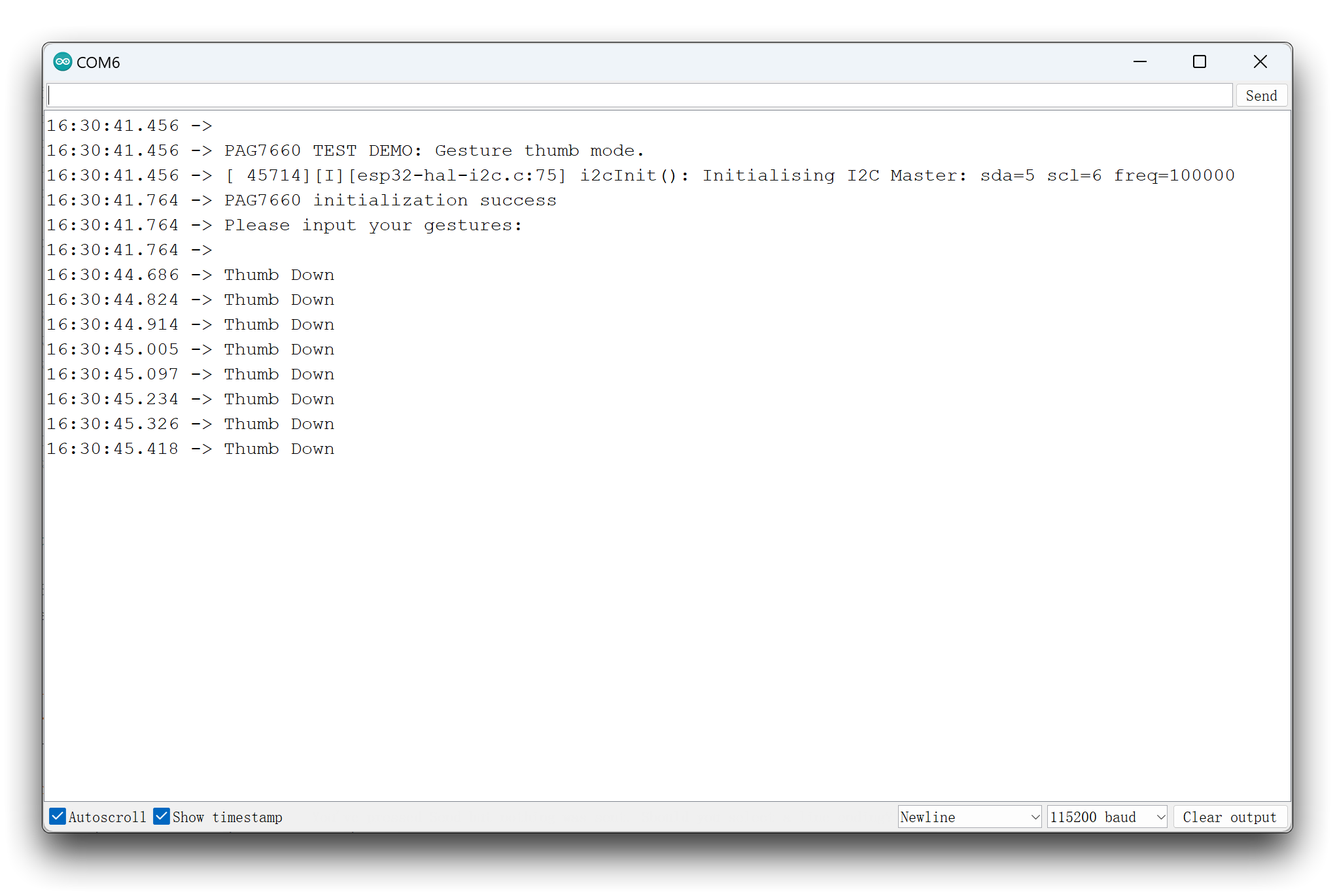
如果一切正常,直接对着 Grove 手势传感器做手势,它将在串行监视器中输出结果。
:::提示 Grove 手势传感器有三种不同的模式。我们已经完成了两种独立模式的程序开发,并在此提供,请参考 手势操作模式 了解不同模式之间的差异。 :::
演示 2:通过 SPI 将传感器连接到 XIAO
如果您希望使用 SPI 方法而不是 IIC,可以参考以下步骤完成您的项目。
步骤 1. 将 4 位 DIP 开关切换到 SPI 位置。

所有开关都需要切换到 ON 位置。
步骤 2. 将 XIAO 连接到 Grove 手势传感器。
将 XIAO 直接插入 Grove 手势传感器的母连接器并使用它。请注意,USB-C 端口始终面向外侧。
步骤 3. 上传程序
将以下程序复制到 Arduino IDE 中,选择您正在使用的 XIAO 开发板,编译并上传程序。
代码 1:手势模式(默认)
#include "Gesture.h"
#define PAG7660_CS D3
pag7660 Gesture; // 默认使用组合模式
void setup() {
Serial.begin(9600);
while(!Serial) {
delay(100);
}
Serial.println("\nPAG7660 测试演示:手势组合模式。");
if(Gesture.init(PAG7660_CS)) {
Serial.println("PAG7660 初始化成功");
} else {
Serial.println("PAG7660 初始化失败");
}
Serial.println("请输入您的手势:\n");
}
void loop() {
pag7660_gesture_t result;
if (Gesture.getResult(result)) {
printResultCombinedMode(result);
}
delay(100);
}
void printResultCombinedMode(const pag7660_gesture_t& result) {
const char *cursor_str[] = {
NULL,
"点击",
"抓取",
"捏合",
};
switch (result.type) {
case 0:
switch (result.cursor.type) {
case 1:
case 2:
case 3:
if (result.cursor.select)
Serial.println(cursor_str[result.cursor.type]);
break;
default:
break;
}
break;
case 1:
case 2:
case 3:
case 4:
case 5:
Serial.print(result.type);
Serial.println("-指");
break;
case 6:
Serial.print("向右旋转 ");
Serial.println(result.rotate);
break;
case 7:
Serial.print("向左旋转 ");
Serial.println(result.rotate);
break;
case 8:
Serial.println("向左滑动");
break;
case 9:
Serial.println("向右滑动");
break;
case 19:
case 20:
case 21:
case 22:
case 23:
Serial.print(result.type - 19 + 1);
Serial.println("-指推");
break;
default:
break;
}
}
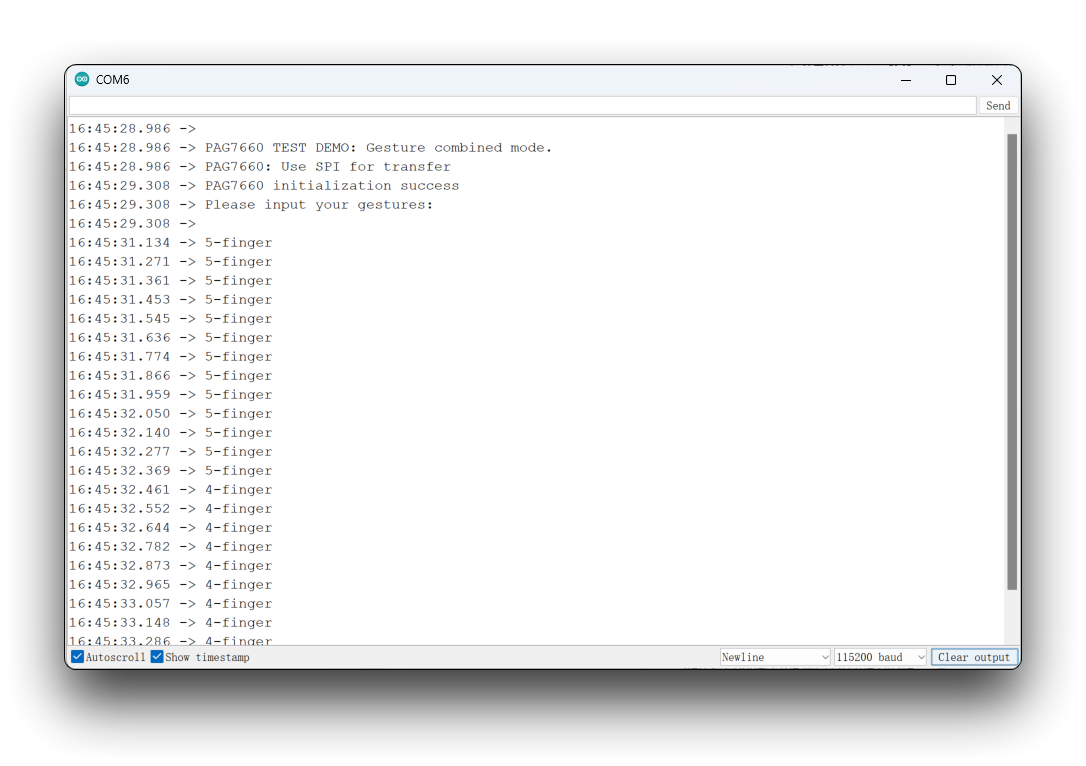
如果一切正常,直接对着 Grove 手势传感器做手势,它将在串行监视器中输出结果。
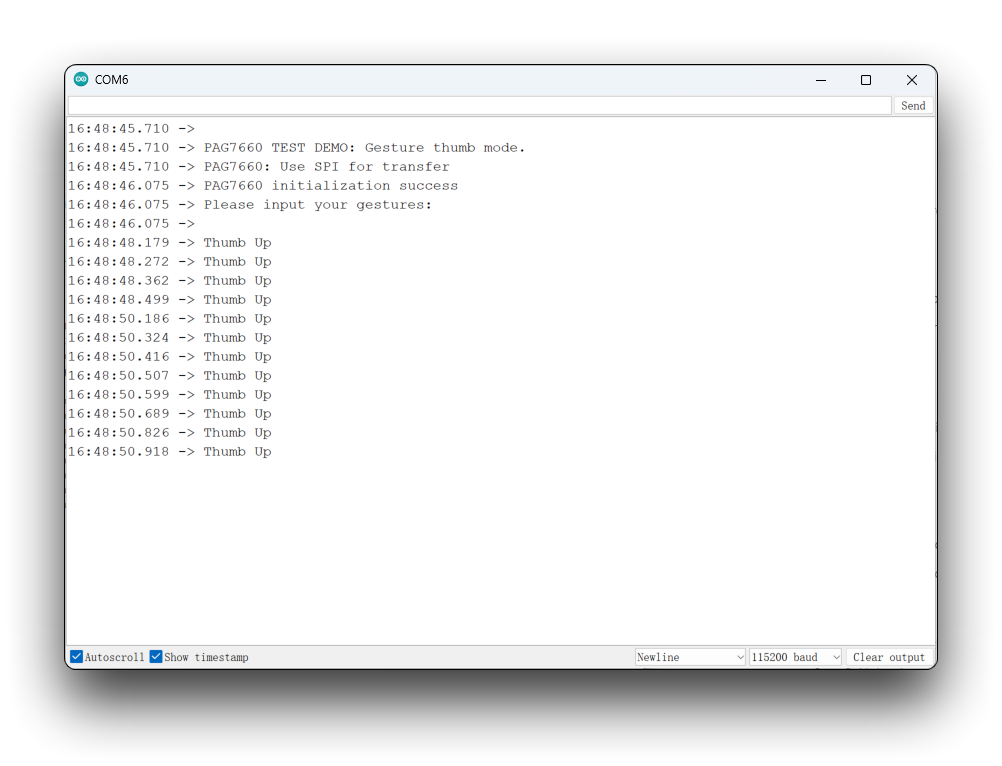
代码 2:拇指模式
#include "Gesture.h"
#define PAG7660_CS D3
pag7660 Gesture(GESTURE_THUMB_MODE); // 使用拇指模式
void setup() {
Serial.begin(9600);
while(!Serial) {
delay(100);
}
Serial.println("\nPAG7660 测试演示:手势拇指模式。");
// 使用 SPI 初始化,传入芯片选择引脚号
if(Gesture.init(PAG7660_CS)) {
Serial.println("PAG7660 初始化成功");
} else {
Serial.println("PAG7660 初始化失败");
}
Serial.println("请输入您的手势:\n");
}
void loop() {
pag7660_gesture_t result;
if (Gesture.getResult(result)) {
if (result.thumb.up)
Serial.println("拇指向上");
else if (result.thumb.down)
Serial.println("拇指向下");
}
delay(100);
}
如果一切正常,直接对着 Grove 手势传感器做手势,它将在串行监视器中输出结果。
:::提示 Grove 手势传感器有三种不同的模式。我们已经完成了两种独立模式的程序开发,并在此提供,请参考 手势操作模式 了解不同模式之间的差异。 :::
资源
- [ZIP] Grove 手势传感器原理图和PCB
- [PDF] Grove 手势传感器原理图
- [Datasheet] PAG7661QN_FW-DS_V0.8_05072022_Confidential.pdf
技术支持与产品讨论
感谢您选择我们的产品!我们致力于为您提供各种支持,确保您使用我们的产品时拥有流畅的体验。我们提供多种沟通渠道,以满足不同的偏好和需求。