支持的软件概述
有两种方法可以启用 Grove Vision AI 模块 V2:
使用 SenseCraft AI 无代码入门
在本节中,我们将引导您使用 SenseCraft AI 模型助手快速部署和观察结果,无需代码且无需其他开发板:
什么是 SenseCraft AI?
SenseCraft AI 使用户能够轻松地将大量公开可用的 AI 模型部署到他们的边缘设备上:
- reComputer (NVIDIA Jetson)
- Seeed Studio XIAO S3 开发板
- Vision AI 模块等
它提供了无缝且用户友好的体验,让您只需点击几下即可将公共 AI 模型直接部署到您的边缘设备上。
它包括:
- 模型助手软件服务
- 设备工作区软件服务
在本节中,我们将使用"模型助手"来启用模块。结合 SenseCraft AI 模型助手的赋能,您可以轻松上传各种协作创建的模型并直接观察结果。
SenseCraft AI 模型助手入门指南
现在我们将使用 SenseCraft AI 快速启动模块,这只需要模块本身。
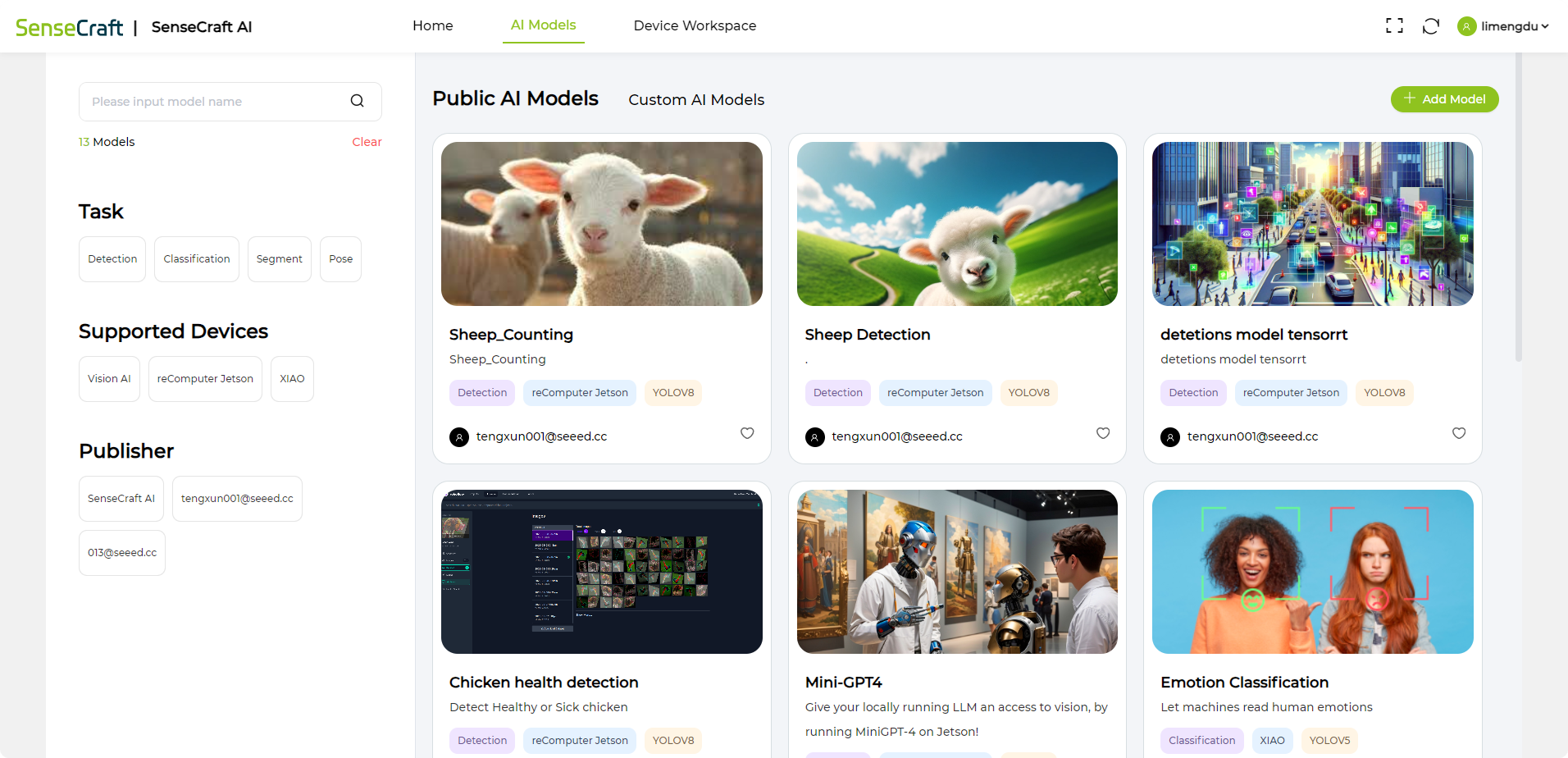
步骤 1. 选择模型
首先,我们需要打开 SenseCraft AI 模型助手主页面。
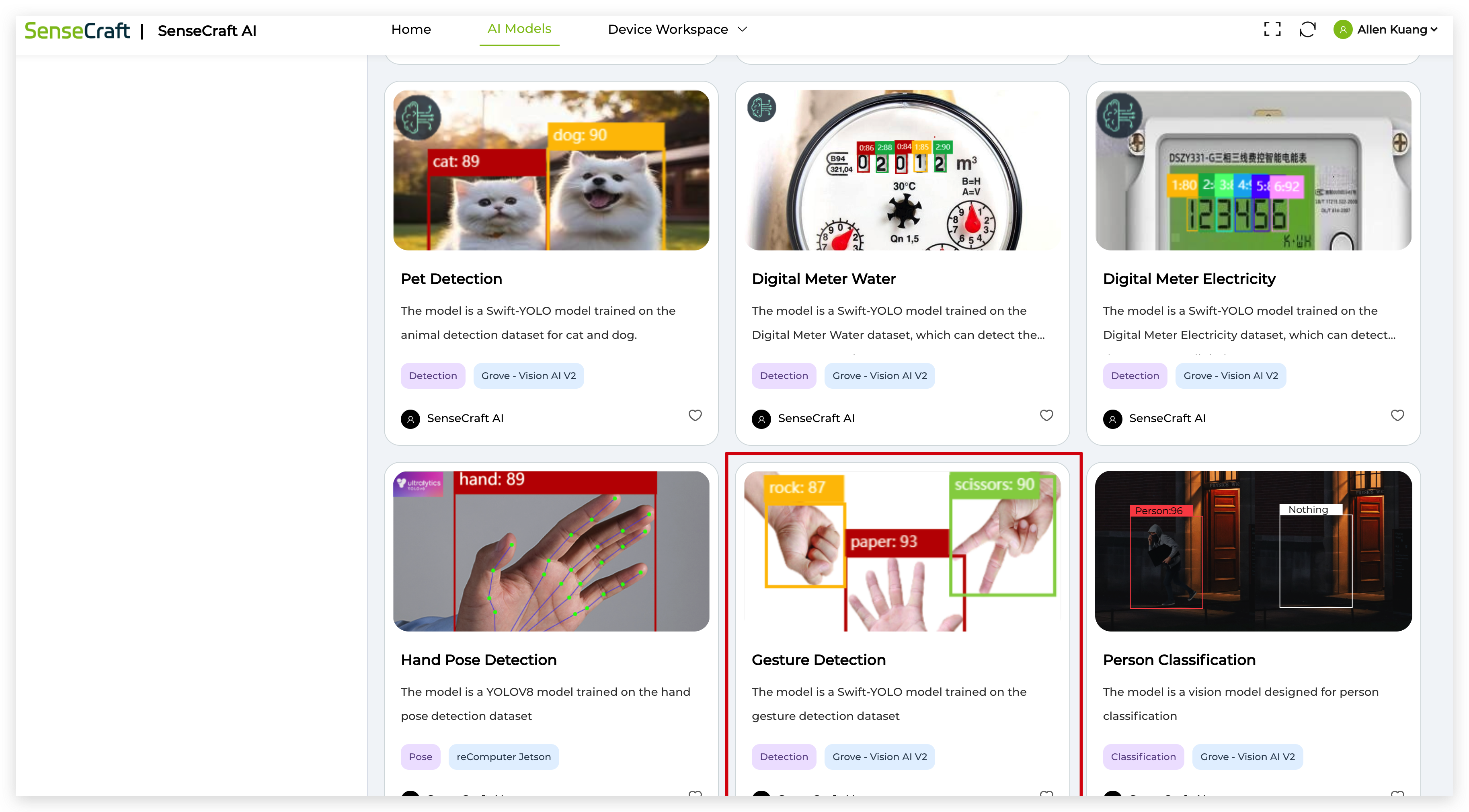
选择您想要部署的模型并点击进入。
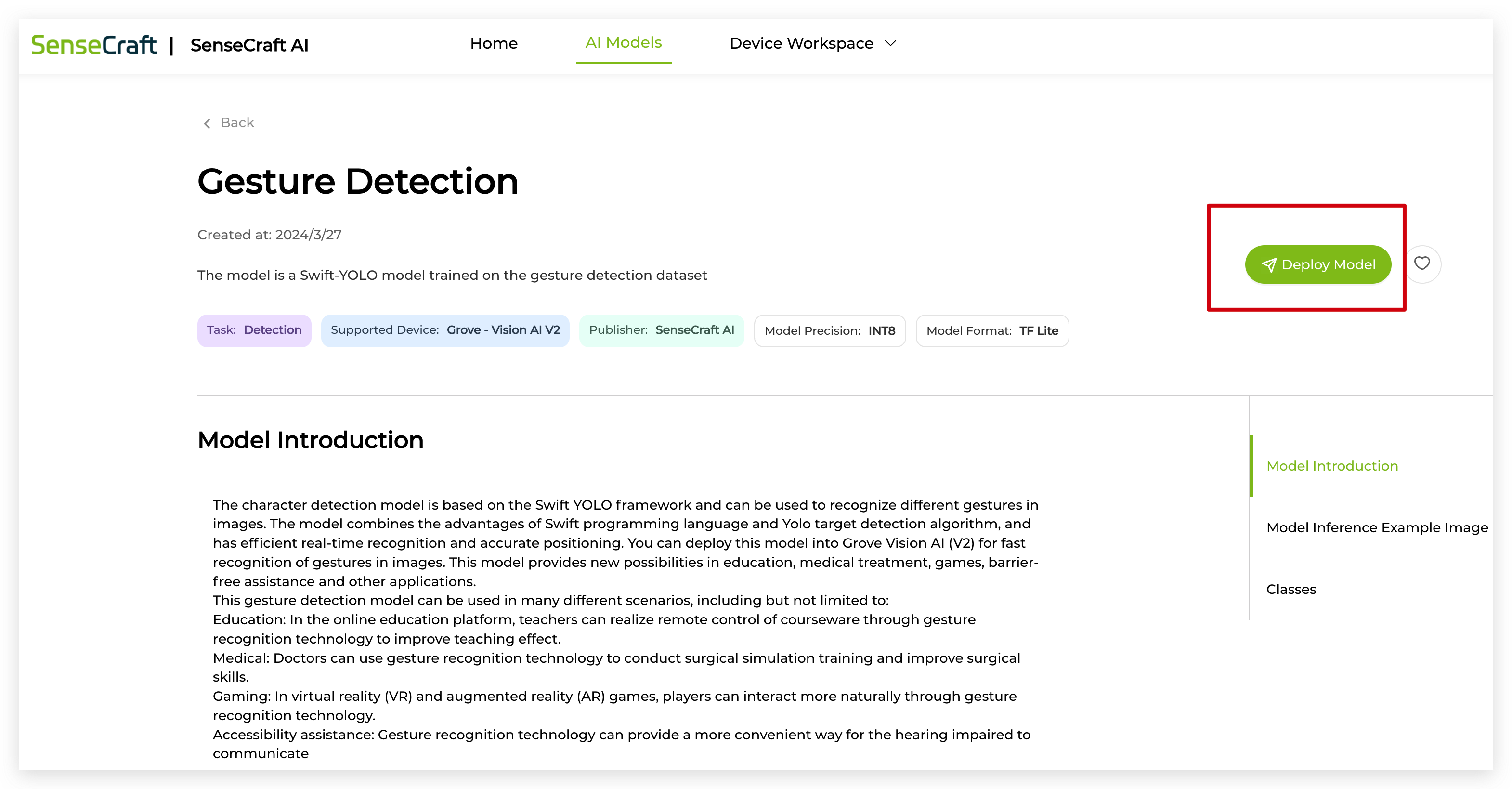
您可以在这里看到此模型的描述,如果适合您,请点击右侧的 Deploy Model 按钮。
步骤 2. 连接模块并上传合适的模型
请使用 Type-C 类型的线缆将 Grove Vision AI V2 连接到您的计算机,然后点击 Connect 按钮。
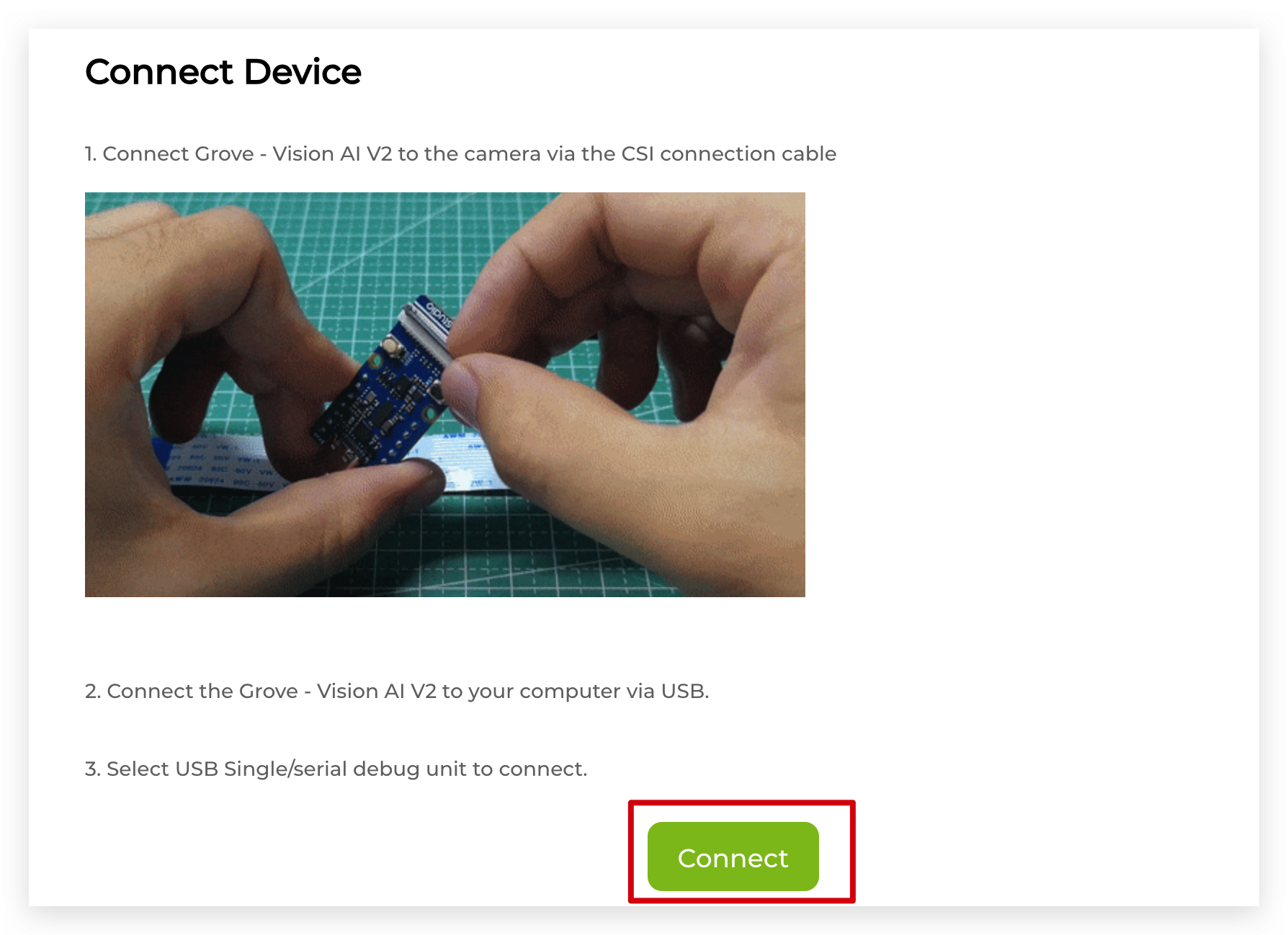
点击 Confirm 按钮。在此页面的左上角,您可以选择 USB Single Serial。然后点击 Connect 按钮。
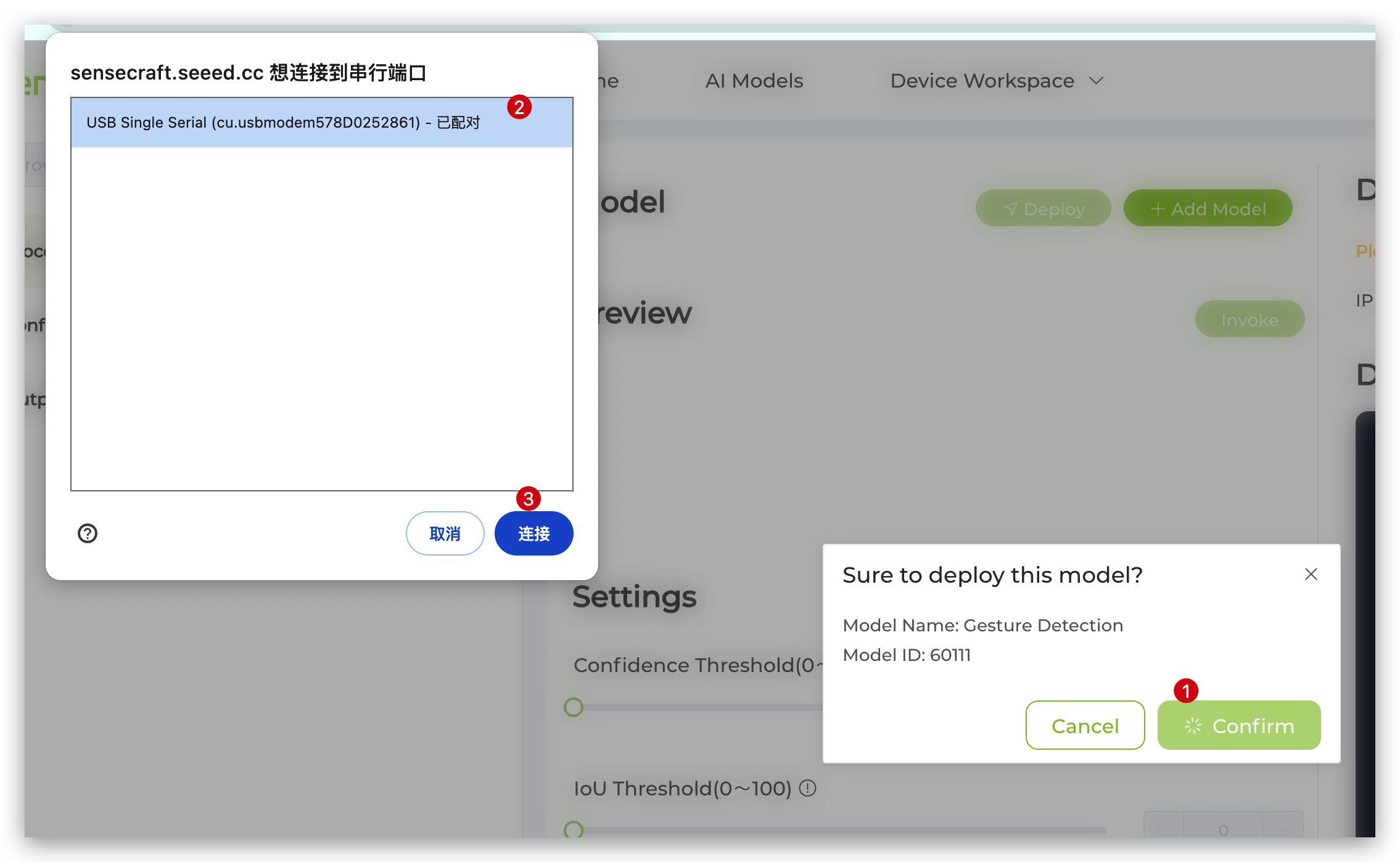
请在此页面停留 1-2 分钟,直到模型成功上传。请注意,在此过程中切换到另一个页面标签可能会导致上传失败(我们的团队正在积极解决此问题,很快就会修复)。
步骤 3. 观察结果
模型成功上传后,您将能够在左侧的预览中看到来自 Grove Vision AI V2 摄像头的实时画面。
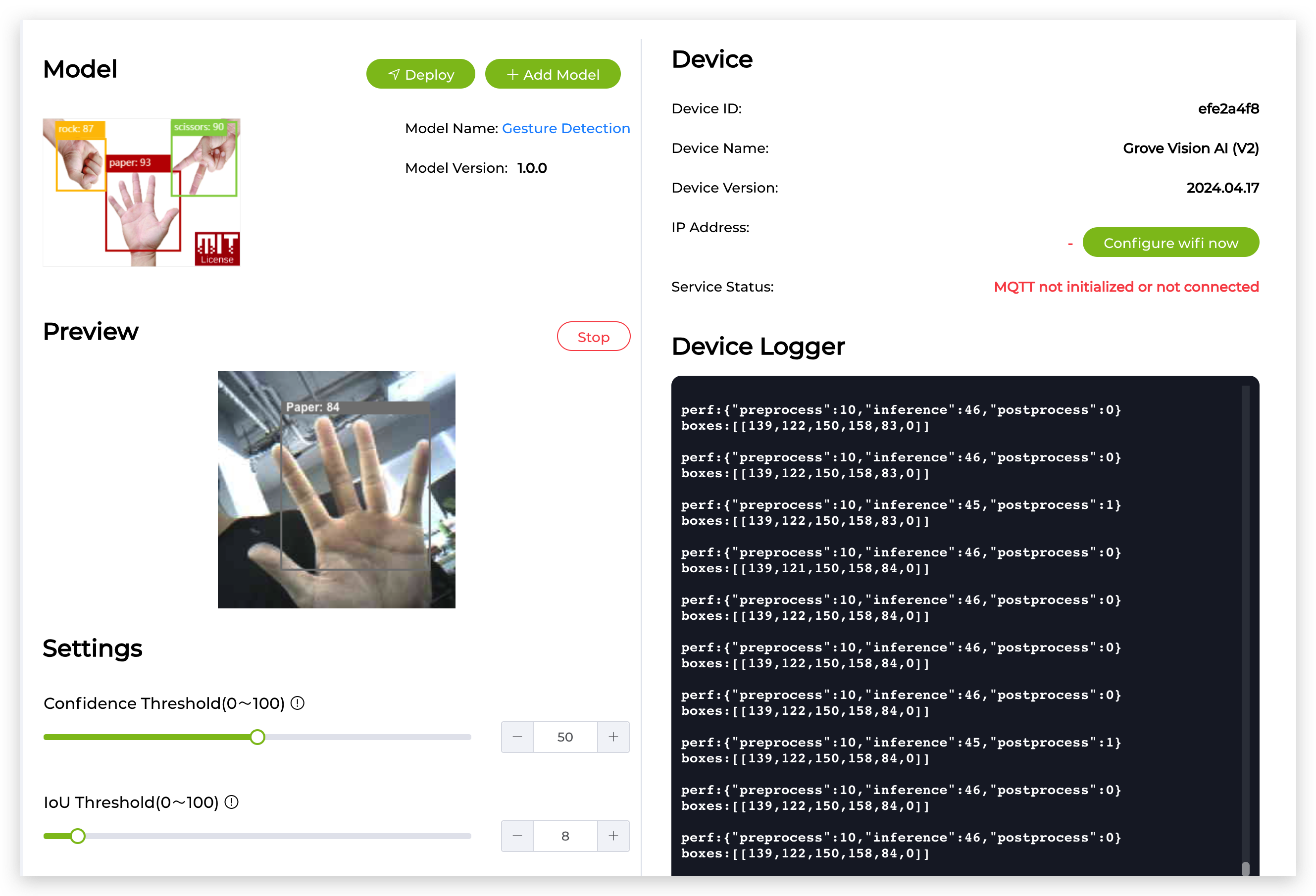
我们可以看到在左侧的预览设置中,有两个设置选项可以更改以优化模型的识别准确性。
- Confidence: 置信度是指模型对其预测分配的确定性或概率水平。
- IoU: IoU 用于评估预测边界框与真实边界框相比的准确性。
- Confidence: 这告诉您计算机视觉模型对其猜测的确定程度。可以将其视为百分比:置信度越高意味着模型越确定。
- IoU(交并比): 这衡量两个框之间的重叠程度。想象您在图片中的对象周围画了一个框,模型也画了一个框。IoU 告诉您框的匹配程度。IoU 越高意味着框越接近。
至此,您已经完成了模型上传和结果观察。
在 Arduino 上编程连接 Seeed Studio XIAO 开发板
Arduino 库介绍
如果这是您第一次使用 Arduino,我们强烈建议您参考 Arduino 入门指南。
Grove Vision AI 使用 WiseEye2 HX6538 芯片,图像处理和模型推理在 Grove Vision AI 本地处理,然后结果通过 IIC 或 UART 输出到 XIAO,因此该库的主要目的是处理 Grove Vision AI 的数据流,不涉及模型推理或图像处理。
Grove Vision AI 通过 IIC 与 XIAO 通信,设备的 IIC 地址是 0x62。图像信息传输通过 USB 串口进行。
功能
在我们开始开发草图之前,让我们看看库的可用功能。
-
bool begin(TwoWire *wire = &Wire, uint16_t address = I2C_ADDRESS, uint32_t wait_delay = 2, uint32_t clock = 400000)—— 初始化 Grove Vision AI V2。输入参数:
TwoWire *wire—— 此指针指向 TwoWire 对象,通常用于与 I2C 设备通信。uint16_t address—— 这是 I2C 设备的地址,用于标识连接到 I2C 总线的特定设备。uint32_t wait_delay—— 发送命令前等待响应的延迟(以毫秒为单位)。uint32_t clock—— 这是 I2C 总线的时钟频率(以 Hz 为单位)。
返回值:
True或False。初始化成功为 true,初始化失败为 false。 -
int invoke(int times = 1, bool filter = 0, bool show = 0)—— 用于向 Grove Vision AI V2 发送 INVOKE 命令,以允许 Grove Vision AI 开始调用模型、推理和识别。输入参数:
int times—— 调用次数。fileter—— 意味着只有当最后结果与之前结果不同时才会发送事件回复(通过几何形状和分数进行比较)。bool show—— 意味着只有当最后结果与之前结果不同时才会发送事件回复(通过几何形状和分数进行比较)。
有关 Grove Vision AI 协议定义的更多信息,您可以阅读 协议文档。
返回值: CMD_OK 或 CMD_ETIMEDOUT。如果模型成功启用则返回 CMD_OK,否则返回 CMD_ETIMEDOUT。
-
int available()—— 检查通过 IIC 从连接的设备可读取多少字节的数据。输入参数: 无。
返回值: 可以从设备读取的数据字节数。
-
int read(char *data, int length)—— 通过 IIC 接口从 Grove Vision AI 读取数据。该函数的目的是用读取的数据填充由提供的数据指针指向的数组。输入参数:
char *data—— 用于存储数据的数组。int length—— 要读取的数据长度。
返回值: 要读取的数据长度。
-
int write(const char *data, int length)—— 通过 I2C 接口向指定设备写入数据。输入参数:
const char *data—— 要写入的数据内容。int length—— 要写入的数据长度。
返回值: 要写入的数据长度。
-
std::vector<boxes_t> &boxes() { return _boxes; }—— 以框的形式输出结果。
typedef struct
{
uint16_t x; // Horizontal coordinates of the centre of the box
uint16_t y; // Vertical coordinates of the centre of the box
uint16_t w; // Width of the identification box
uint16_t h; // Height of the identification box
uint8_t score; // Confidence in identifying as target
uint8_t target; // Target
} boxes_t;
std::vector<classes_t> &classes() { return _classes; }—— 以类别的形式输出结果。
typedef struct
{
uint8_t target; // Target
uint8_t score; // Confidence in identifying as target
} classes_t;
std::vector<point_t> &points() { return _points; }—— 以点的形式输出结果。
typedef struct
{
uint16_t x; // Horizontal coordinates of the identification point
uint16_t y; // Vertical coordinates of identification point
uint16_t z; // Relative depth coordinates of the identification point
uint8_t score; // Confidence in identifying as target
uint8_t target; // Target
} point_t;
这里的深度坐标是相对的,这并不意味着 Grove Vision AI 具备深度相机功能,而是算法计算出的相对深度坐标,在某些模型中有效(例如,face-3d 模型)。
perf_t &perf() { return _perf; }—— 图像处理和推理时间。
typedef struct
{
uint16_t prepocess; // Pre-processing time
uint16_t inference; // inference time
uint16_t postprocess; // Post-processing time
} perf_t;
输出并不总是输出识别框和点的信息,这取决于模型。
安装
由于您已经下载了 zip 库文件,请打开您的 Arduino IDE,点击 Sketch > Include Library > Add .ZIP Library。选择您刚刚下载的 zip 文件,如果库安装正确,您将在通知窗口中看到 Library added to your libraries。这意味着库已成功安装。

Seeed Studio XIAO 入门指南
如果您想获得一个具有机器视觉功能的传感器原型,那么您可能需要考虑添加一个 XIAO。使用 XIAO 和 Grove Vision AI V2,您可以使用想要的模型并快速将其部署到您的应用领域。
准备工作
步骤 1. 所需材料
在本教程中,我们将以 XIAO ESP32S3 为例介绍 Arduino 程序的使用。因此,我们建议您准备以下硬件。
| Seeed Studio XIAO ESP32S3 | Grove Vision AI V2 | OV5647-62 FOV 相机模块 适用于 Raspberry Pi 3B+4B |
|---|---|---|
 |  |  |
然后您需要通过排针将 XIAO 和 Grove Vision AI V2 连接起来(或使用扩展板和 Grove 接口)。
请注意连接方向,Grove Vision AI 的 Type-C 连接器应与 XIAO 的 Type-C 连接器方向相同。
步骤 2. 启动 Arduino 应用程序。
步骤 3. 选择您的开发板型号并将其添加到 Arduino IDE。
以下是 Grove Vision AI V2 示例支持的开发板列表,您可以选择想要使用的开发板来完成下一个示例。在本教程中,将以 XIAO ESP32S3 为例。
-
如果您想在后续例程中使用 Seeed Studio XIAO SAMD21,请参考 此教程 完成添加。
-
如果您想在后续例程中使用 Seeed Studio XIAO RP2040,请参考 此教程 完成添加。
-
如果您想在后续例程中使用 Seeed Studio XIAO nRF52840,请参考 此教程 完成添加。
-
如果您想在后续例程中使用 Seeed Studio XIAO ESP32C3,请参考 此教程 完成添加。
-
如果您想在后续例程中使用 Seeed Studio XIAO ESP32S3,请参考 此教程 完成添加。
-
如果您想在后续例程中使用 Seeeduino V4.3,请参考 此教程 完成添加。
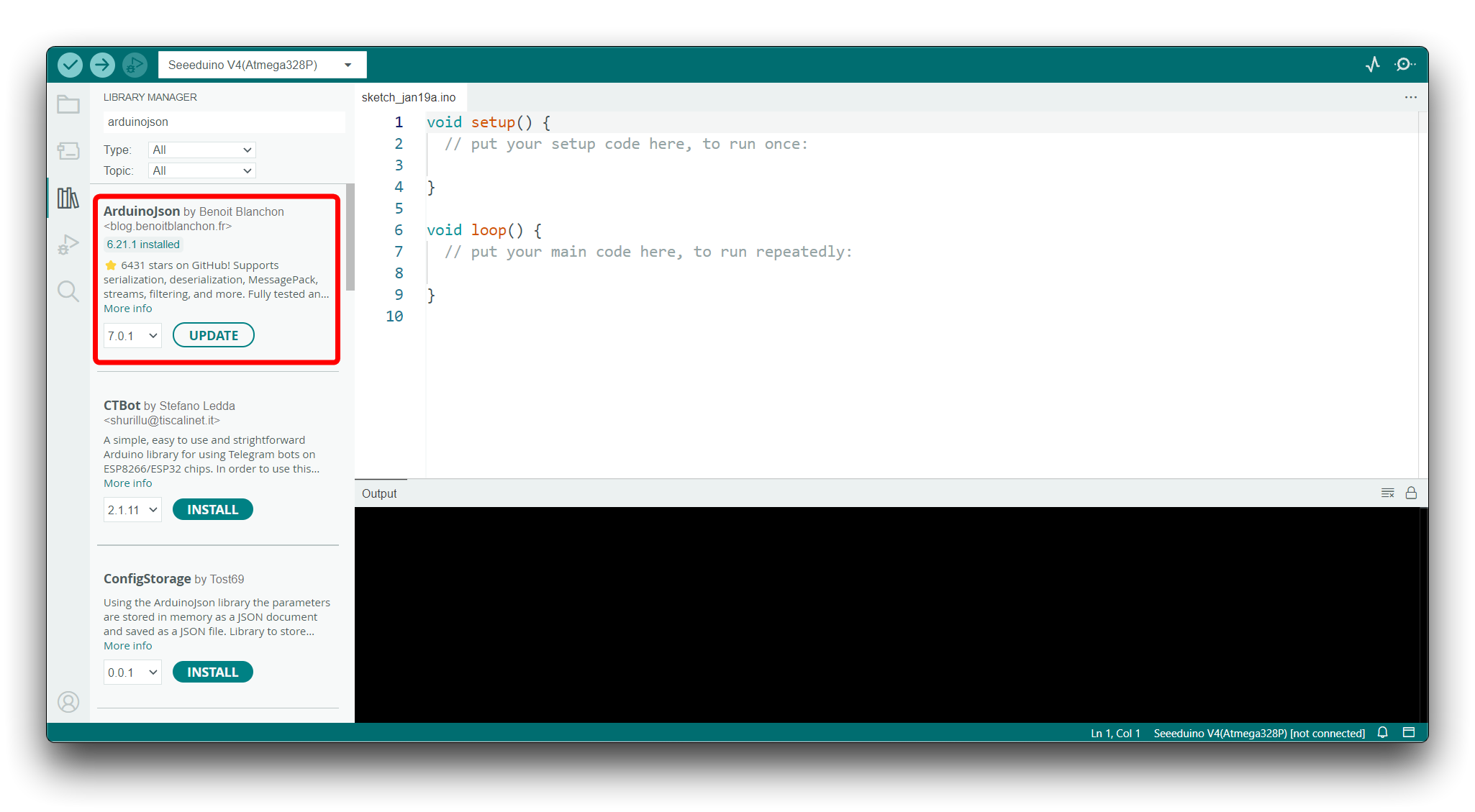
步骤 4. 安装 ArduinoJSON 库。
转到 Sketch 菜单,然后选择 Include Library > Manage Libraries...。这将打开库管理器。在库管理器顶部的搜索栏中,输入 ArduinoJSON。搜索结果将列出 ArduinoJSON 库。库旁边会有一个 Install 按钮。点击 Install 按钮。Arduino IDE 将自动下载并安装库到您的 Arduino 开发环境中。
演示 1. 使用 XIAO 获取识别结果
以下程序是一个简单的示例,帮助您获取和解析 Grove Vision AI V2 报告的识别信息。
#include <Seeed_Arduino_SSCMA.h>
SSCMA AI;
void setup()
{
AI.begin();
Serial.begin(9600);
}
void loop()
{
if (!AI.invoke())
{
Serial.println("invoke success");
Serial.print("perf: prepocess=");
Serial.print(AI.perf().prepocess);
Serial.print(", inference=");
Serial.print(AI.perf().inference);
Serial.print(", postpocess=");
Serial.println(AI.perf().postprocess);
for (int i = 0; i < AI.boxes().size(); i++)
{
Serial.print("Box[");
Serial.print(i);
Serial.print("] target=");
Serial.print(AI.boxes()[i].target);
Serial.print(", score=");
Serial.print(AI.boxes()[i].score);
Serial.print(", x=");
Serial.print(AI.boxes()[i].x);
Serial.print(", y=");
Serial.print(AI.boxes()[i].y);
Serial.print(", w=");
Serial.print(AI.boxes()[i].w);
Serial.print(", h=");
Serial.println(AI.boxes()[i].h);
}
for (int i = 0; i < AI.classes().size(); i++)
{
Serial.print("Class[");
Serial.print(i);
Serial.print("] target=");
Serial.print(AI.classes()[i].target);
Serial.print(", score=");
Serial.println(AI.classes()[i].score);
}
for (int i = 0; i < AI.points().size(); i++)
{
Serial.print("Point[");
Serial.print(i);
Serial.print("] target=");
Serial.print(AI.points()[i].target);
Serial.print(", score=");
Serial.print(AI.points()[i].score);
Serial.print(", x=");
Serial.print(AI.points()[i].x);
Serial.print(", y=");
Serial.println(AI.points()[i].y);
}
}
}
程序说明
这个 Arduino 程序使用 Seeed_Arduino_SSCMA 库与 Grove Vision AI Module V2 进行接口通信。在 setup() 函数中,AI 模块被初始化,并启动串口通信。
loop() 函数重复调用 invoke() 方法,使用 Grove Vision AI Module V2 的内置算法执行推理。推理成功后,程序会将性能指标打印到串口监视器,包括预处理、推理和后处理时间。
程序处理并打印推理结果的详细信息,包括:
- 边界框(
boxes()),以 x 和 y 坐标、宽度和高度的形式识别检测到的物体的位置和尺寸。 - 分类(
classes()),识别检测到的物体类别及其置信度分数。 - 点(
points()),表示检测到的物体的特定特征或关键点,以及它们的 x 和 y 坐标和置信度分数。
这些结果提供了关于 AI 模块检测到的物体、它们的位置、大小以及每次检测或分类的置信度水平的见解。输出被打印到串口监视器以供进一步分析或调试。
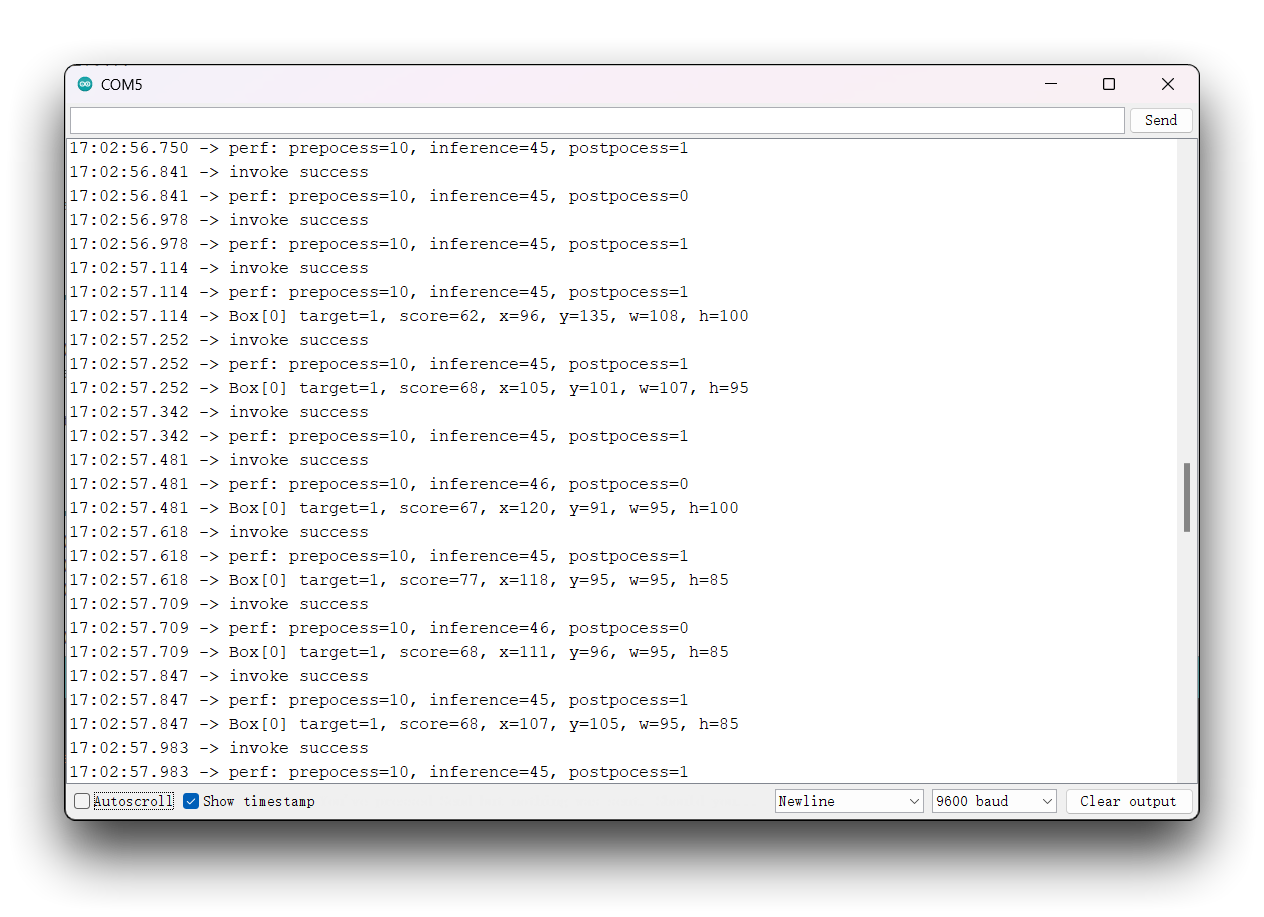
效果
我们仍然使用手势检测模型。上传应用程序后,请打开串口监视器并将串口监视器的波特率设置为 9600。请准备您的"石头剪刀布"并将其指向摄像头的识别区域,串口监视器将输出识别结果。
演示 2. 通过 XIAO 发送控制命令
Grove Vision AI V2 支持通过 UART 协议 进行通信,通过使用内置协议,可以操作 Grove Vision AI V2 的 Himax WE2 芯片。以下示例程序展示了如何使用 XIAO 通过串口与 Grove Vision AI V2 进行通信。
#include <Arduino.h>
#include <Wire.h>
#include <Seeed_Arduino_SSCMA.h>
SSCMA AI;
void setup()
{
// put your setup code here, to run once:
Wire.begin();
Serial.begin(115200);
while (!Serial)
delay(1000);
Serial.println("Proxy start");
}
char buf[512];
void loop()
{
int s_len = Serial.available();
if (s_len)
{
int len = Serial.readBytes((char *)buf, s_len);
AI.write(buf, len);
}
int t_len = AI.available();
if (t_len)
{
if (t_len > 512)
{
t_len = 512;
}
AI.read(buf, t_len);
Serial.write(buf, t_len);
}
}
程序说明
这个 Arduino 程序在串口控制台和 Grove Vision AI V2 模块之间建立通信接口,利用 Seeed Studio 机器学习框架 SSCMA。该程序旨在通过串口命令向 Grove Vision AI V2 模块传递数据和从中接收数据。
以下是程序的修改描述:
在 setup() 函数中:
- 使用
Wire.begin()初始化 I2C 通信协议,允许与 Grove Vision AI V2 模块进行通信。 - 以 115200 的波特率设置串口通信。
- 程序等待串口连接激活,然后向串口监视器输出 "Proxy start",表示代理通信通道已准备就绪。
在 loop() 函数中:
- 程序使用
Serial.available()检查传入的串口数据。如果有数据,它将其读取到名为buf的缓冲区中。 - 缓冲区中收集的数据然后使用
AI.write()方法发送到 Grove Vision AI V2 模块。 - 接下来,程序使用
AI.available()检查 Grove Vision AI V2 模块是否有数据要发送回来。 - 如果 Grove Vision AI V2 模块发送了数据,程序使用
AI.read()将此数据读取到缓冲区buf中,确保数据不超过 512 字节的缓冲区大小。 - 最后,从 Grove Vision AI V2 模块接收的数据使用
Serial.write()传输回串口控制台,完成串口接口和视觉 AI 模块之间的双向通信。
这种设置允许与 Grove Vision AI V2 模块进行交互式通信,使用户能够通过串口连接向模块发送指令并从模块接收数据。
资源
故障排除
Q1:为什么使用 XIAO ESP32C3 成功上传 Demo1 代码后,我在端口上看不到识别结果?
如果您使用的是 Arduino IDE 版本 1.xx,请在按下 C3 上的 Reset 按钮后重新打开串口监视器以查看结果。如果您使用的是 Arduino 版本 2.xx,按下 Reset 按钮后消息将在串口监视器中刷新。
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。