Grove Vision AI 模块 V2
简介
Grove - Vision AI V2 是一款拇指大小的人工智能视觉模块,配备了 WiseEye2 HX6538 处理器,采用 Arm Cortex-M55 双核架构。它具有标准的 CSI 接口,与树莓派摄像头兼容。它具有一个板载数字麦克风和一个 SD 卡槽。非常适合各种嵌入式人工智能视觉项目。通过 SenseCraft AI 算法平台,训练好的机器学习模型可以部署到传感器上,无需编码。它与 XIAO 系列和 Arduino 生态系统兼容,是各种目标检测应用的理想选择。
特点
- 基于 WiseEye2 HX6538 处理器的首款板,具有双核 Arm Cortex-M55 架构。
- 配备集成的 Arm Ethos-U55 微型神经网络加速单元,非常适合 AI 图像视觉应用。
- 兼容广泛的树莓派摄像头。
- 板载 PDM 麦克风、SD 卡槽、Type-C、Grove 接口以及丰富的外围设备,有助于原型开发。
- 与 Seeed Studio XIAO 板的扩展性。
- 来自 SenseCraft AI 的现成 AI 模型,支持无代码部署。
- 支持各种高效的 AI 模型,包括 MobilenetV1、MobilenetV2、Efficientnet-lite、Yolov5 和 Yolov8。
应用
- 工业自动化:质量检测、预测性维护、语音控制等。
- 智能城市:设备监控、能源管理等。
- 交通:状态监测、位置跟踪等。
- 智能农业:环境监测等。
- 移动物联网设备:可穿戴设备、手持设备等。
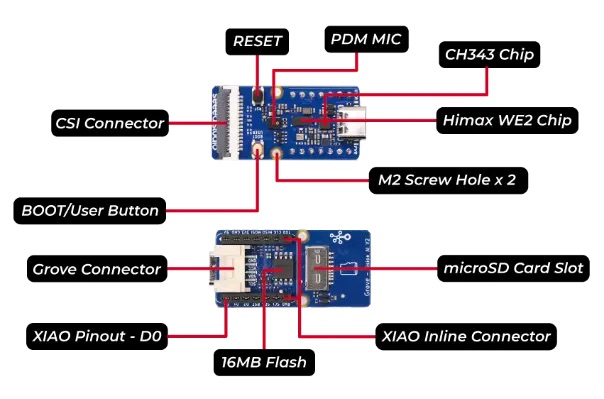
硬件概述
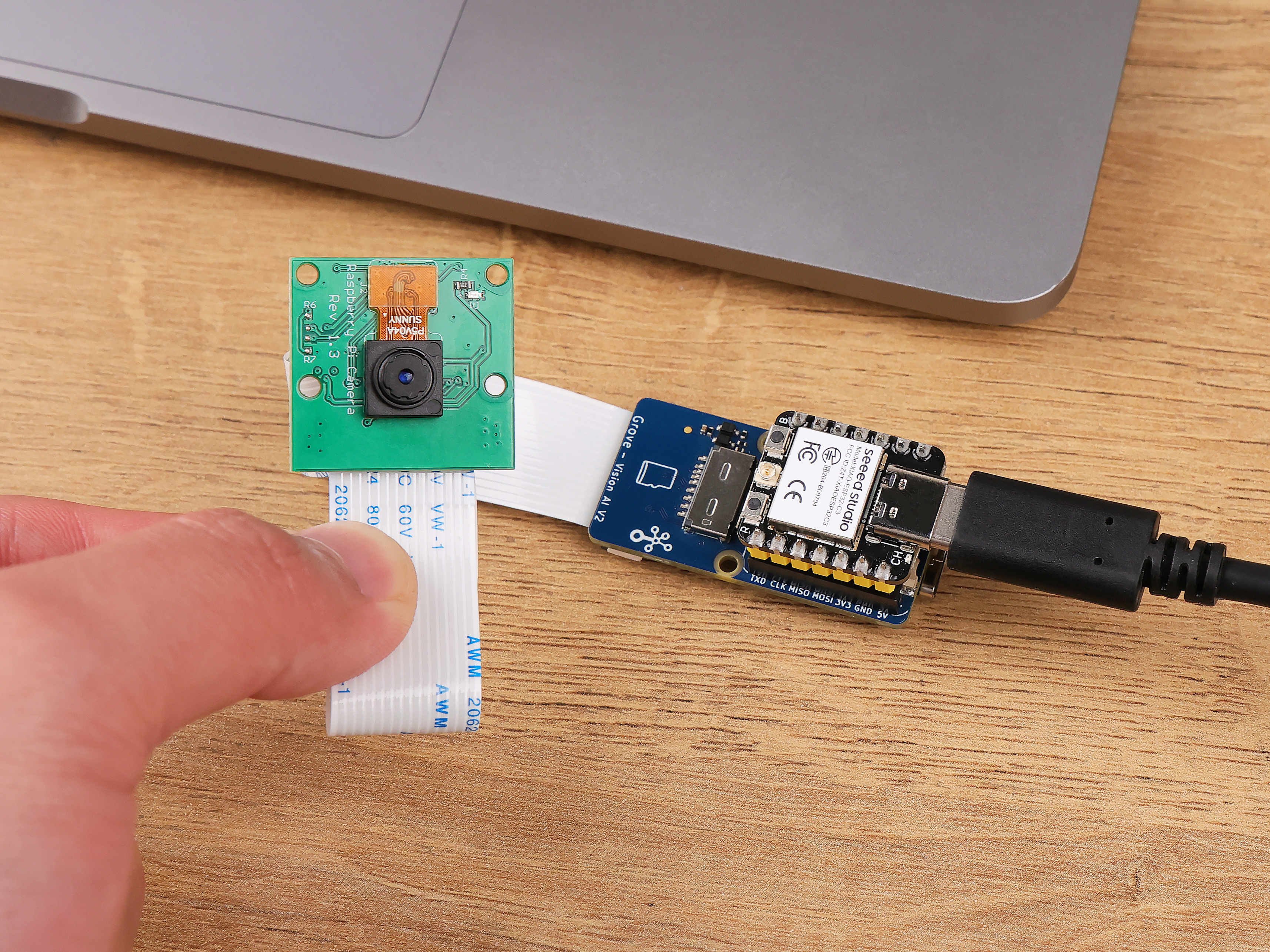
为了充分利用 Grove Vision AI V2 的全部功能,您可能需要单独购买一个 CSI 摄像头,我们推荐使用 OV5647-62 FOV 树莓派摄像头模块。
当您准备好 Grove Vision AI V2 和摄像头后,您可以通过 CSI 连接电缆将它们连接起来。连接时,请注意排针的方向,不要插反。
入门指南
启动
如果您使用了一些不寻常的方法,导致 Grove Vision AI 完全无法正常工作(在软件层面上),那么您可能需要将设备置于 BootLoader 模式以恢复设备。以下是如何进入 BootLoader 模式的方法。
方法 1
请断开 Grove Vision AI 与计算机之间的连接电缆,然后按住设备上的 Boot 按钮不放。此时,请使用 Type-C 类型的数据电缆将 Grove Vision AI 连接到计算机上,然后再释放按钮。此时设备将进入 BootLoader 模式。
方法 2
将 Grove Vision AI 连接到计算机上,您可以通过按下 Boot 按钮然后快速按下 Reset 按钮来进入 BootLoader 模式。
复位
如果您的设备突然无法上传数据或图像卡住,您可以尝试使用复位按钮重启设备。
驱动程序
如果连接Grove Vision AI V2后发现计算机无法识别设备,则可能需要在计算机上安装CH343驱动程序。以下是下载和安装CH343驱动程序的链接。
- Windows供应商VCP驱动程序一键安装程序:CH343SER.EXE
- Windows供应商VCP驱动程序:CH343SER.ZIP
- Windows CDC驱动程序一键安装程序:CH343CDC.EXE
- Windows CDC驱动程序:CH343CDC.ZIP
- macOS供应商VCP驱动程序:CH34xSER_MAC.ZIP
Arduino库概述
Grove Vision AI使用WiseEye2 HX6538芯片,图像处理和模型推理在Grove Vision AI本地进行处理,然后结果通过IIC或UART输出到XIAO,因此该库的主要目的是处理Grove Vision AI的数据流,不涉及模型推理或图像处理。因此,该库的主要目的是处理Grove Vision AI的数据流,而不涉及模型推理或图像处理。
Grove Vision AI通过IIC与XIAO通信,设备的IIC地址为0x62。图像信息传输通过USB串行端口进行
-
功能
在开始开发草图之前,让我们看看库中提供的可用函数。
-
bool begin(TwoWire *wire = &Wire, uint16_t address = I2C_ADDRESS, uint32_t wait_delay = 2, uint32_t clock = 400000)—— 初始化Grove Vision AI V2。输入参数:
TwoWire *wire—— 此指针指向一个TwoWire对象,通常用于与I2C设备通信。uint16_t address—— 这是标识连接到I2C总线的特定设备的I2C设备的地址。uint32_t wait_delay—— 在发送命令之前等待响应的延迟时间(以毫秒为单位)。uint32_t clock—— 这是I2C总线的时钟速率(以Hz为单位)。
返回:
True或False。初始化成功为true,初始化失败为false。 -
int invoke(int times = 1, bool filter = 0, bool show = 0)—— 用于向Grove Vision AI V2发送INVOKE命令,以允许Grove Vision AI开始调用模型、推理和识别。输入参数:
int times—— Invoke的次数。fileter—— 意味着只有在最后一个结果与上一个结果不同时才会发送事件回复(通过几何和分数进行比较)。bool show—— 意味着只有在最后一个结果与上一个结果不同时才会发送事件回复(通过几何和分数进行比较)。
返回:
CMD_OK或CMD_ETIMEDOUT。如果模型成功启用,则返回CMD_OK,否则返回CMD_ETIMEDOUT。 -
int available()—— 检查通过IIC连接的设备中有多少字节的数据可供读取。输入参数: 无。
返回: 可从设备中读取的数据字节数。
-
int read(char *data, int length)—— 通过IIC接口从Grove Vision AI读取数据。该函数的目的是使用提供的数据指针指向的数组填充读取的数据。输入参数:
char *data—— 用于存储数据的数组。int length—— 要读取的数据长度。
返回: 要读取的数据长度。
-
int write(const char *data, int length)—— 通过I2C接口向指定设备写入数据。输入参数:
const char *data—— 要写入的数据内容。int length—— 要写入的数据长度。
返回: 要写入的数据长度。
-
std::vector<boxes_t> &boxes() { return _boxes; }—— 以框的形式输出结果。
-
typedef struct
{
uint8_t target; // Target
uint8_t score; // Confidence in identifying as target
} classes_t;
std::vector<point_t> &points() { return _points; }—— 将结果以点的形式输出。
typedef struct
{
uint16_t x; // Horizontal coordinates of the identification point
uint16_t y; // Vertical coordinates of identification point
uint16_t z; // Relative depth coordinates of the identification point
uint8_t score; // Confidence in identifying as target
uint8_t target; // Target
} point_t;
:::注意 这里的深度坐标是相对的,这并不意味着 Grove Vision AI 启用了深度摄像头,而是算法计算出一个相对深度坐标,在某些模型(例如 face-3d 模型)中是有效的。 :::
perf_t &perf() { return _perf; }—— 图像处理和推断时间。
typedef struct
{
uint16_t prepocess; // Pre-processing time
uint16_t inference; // inference time
uint16_t postprocess; // Post-processing time
} perf_t;
:::注意 输出并不总是包含识别框和点的信息,这取决于模型。 :::
安装
由于您已经下载了 zip 库,请打开 Arduino IDE,单击 Sketch > Include Library > Add .ZIP Library。选择您刚下载的 zip 文件,如果库安装正确,您将在通知窗口中看到 Library added to your libraries。这意味着库已成功安装。

SenseCraft AI

SenseCraft是Seeed Studio开发的一系列软件服务,旨在为用户提供更快速、更简单的软件服务和应用程序。SenseCraft拥有三个产品线,包括数据线、边缘线和人工智能线,能够满足用户在数据服务、设备管理和人工智能应用方面的需求。无论您需要什么解决方案,SenseCraft都能为您提供高效可靠的解决方案和定制服务。
结合SenseCraft AI模型助手的赋能,您可以轻松上传各种共创模型,并直接观察结果。
在这一部分,我们将指导您如何使用SenseCraft AI模型助手快速部署和观察结果。
步骤 1:将 Grove Vision AI V2 连接到 SenseCraft AI 模型助手
首先,我们需要打开主 SenseCraft AI 模型助手页面。
请使用Type-C类型的电缆将Grove Vision AI V2连接到您的计算机。
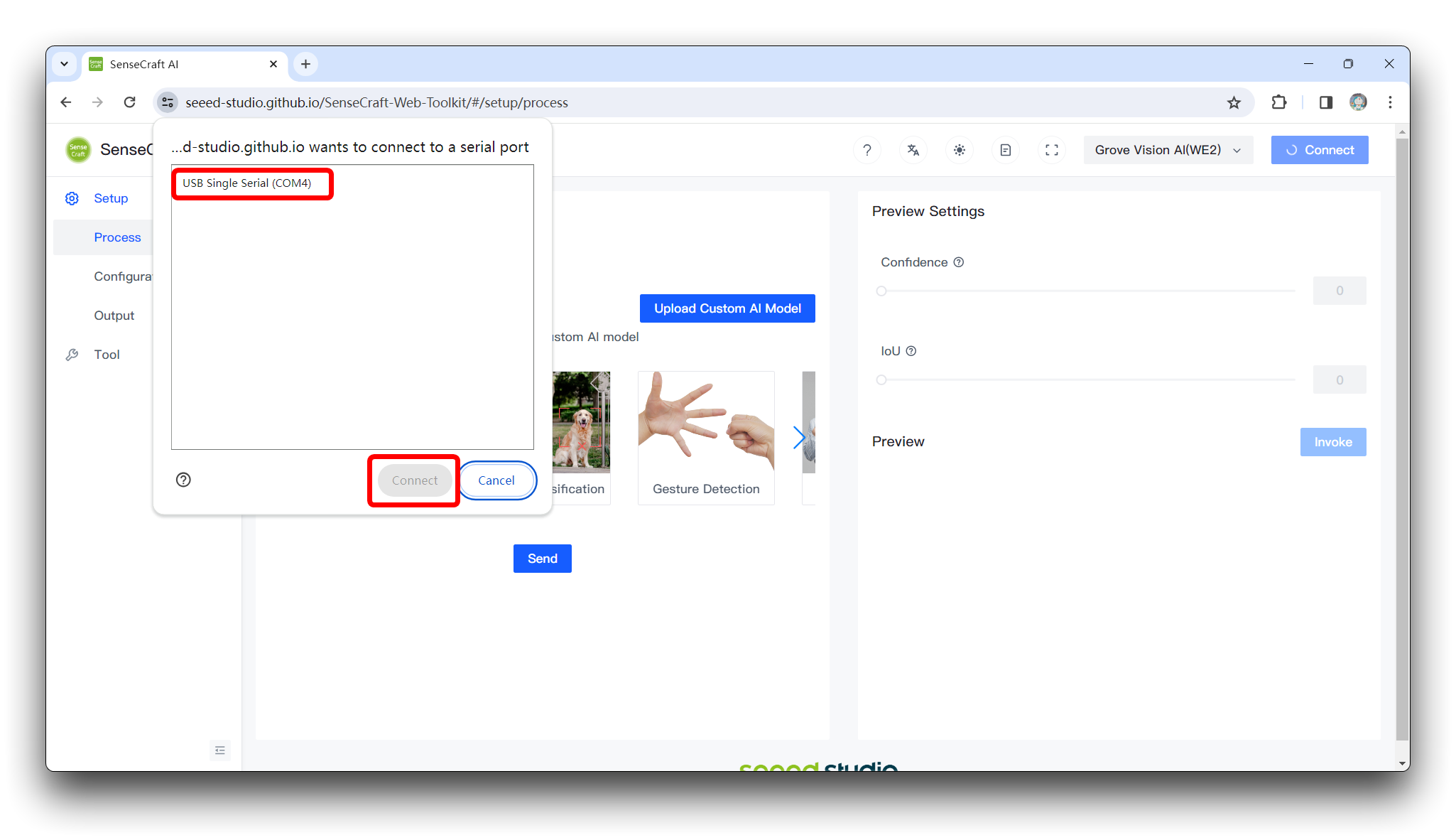
在SenseCraft AI模型助手页面的右上角,您可以选择Grove Vision AI (WE2)。然后点击右侧的连接按钮。
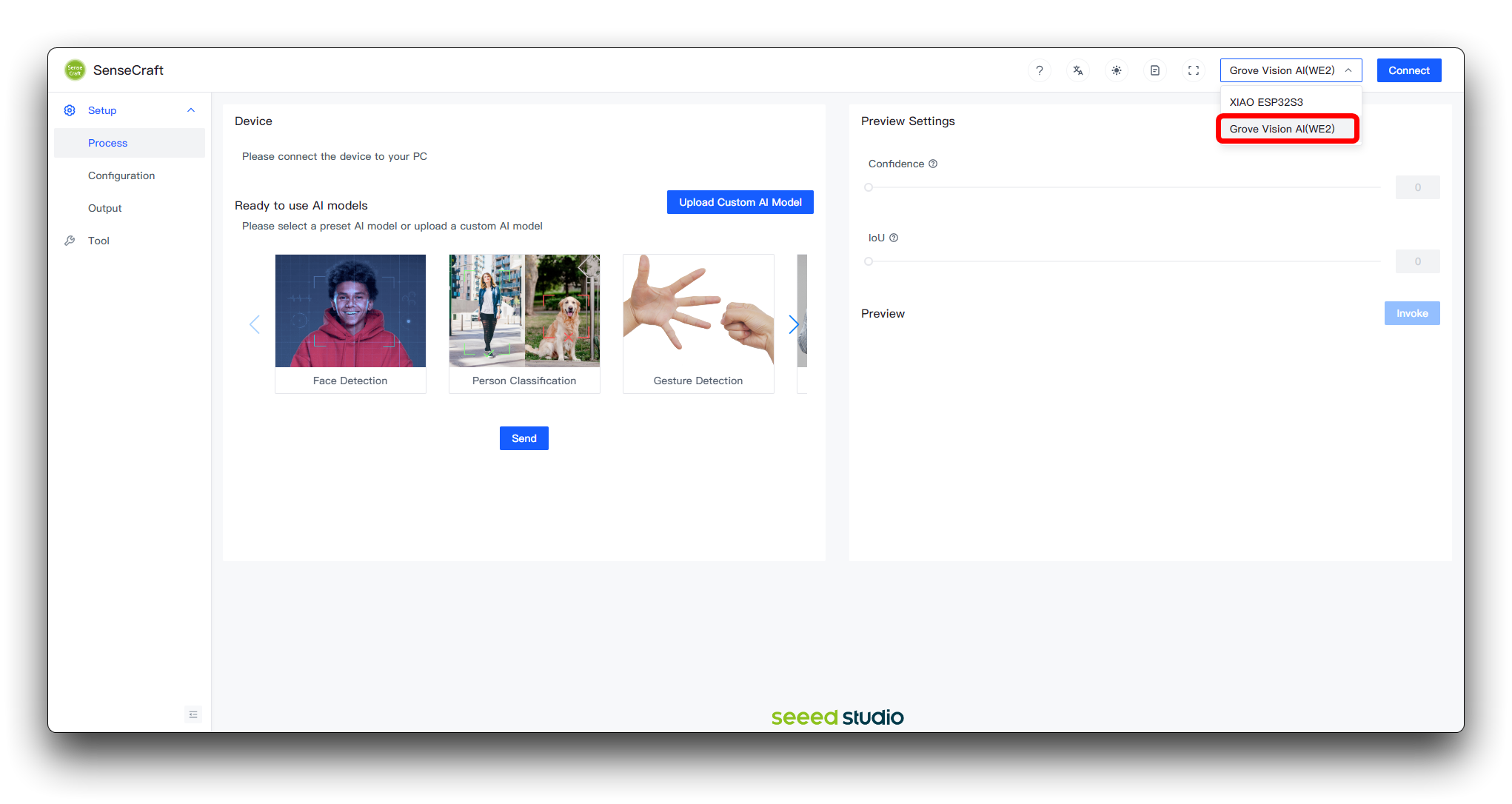
在弹出的新窗口中,选择设备的正确COM端口,然后点击连接按钮。
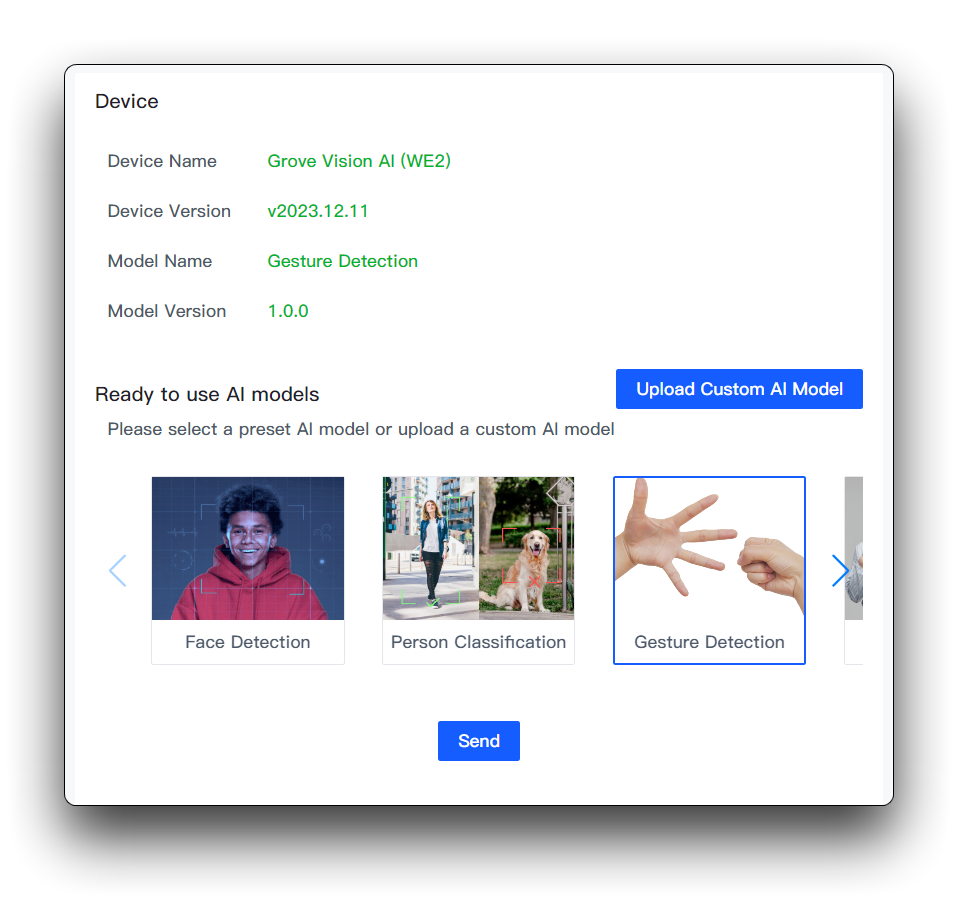
然后,只需选择您想要使用的模型,然后点击下方的“发送”按钮。这里以手势检测为例。
等待1到2分钟以上传模型。
步骤3:观察
一旦模型成功上传,您将能够在右侧的预览中看到来自Grove Vision AI V2摄像头的实时视频。
- 我们可以看到在右侧的预览设置中,有两个设置选项可以更改,以优化模型的识别准确性。
- 置信度: 置信度是指模型对其预测所赋予的确定性或概率水平。
- IoU: IoU is used to assess the accuracy of predicted bounding boxes compared to truth bounding boxes.
此时,您已经完成了上传模型并观察结果的过程。
XIAO示例
如果您想要获得具有机器视觉功能的传感器原型,那么您可能希望考虑添加一个XIAO。 使用XIAO和Grove Vision AI V2,您可以使用您想要的模型,并快速部署到您的应用领域中。
在此之前,您仍然需要按照SenseCraft AI的步骤和内容先上传您想要使用的模型。
步骤 1. 所需材料
在本教程中,我们将以XIAO ESP32S3为例介绍使用Arduino程序的方法。 因此,我们建议您准备以下硬件。
| Seeed Studio XIAO ESP32S3 | Grove Vision AI V2 | OV5647-62 FOV Camera Module for Raspberry Pi 3B+4B |
|---|---|---|
 |  |  |
You then need to connect the XIAO and Grove Vision AI V2 via the row of pins (or use the expansion board and Grove interface).
然后,您需要通过引脚排(或使用扩展板和Grove接口)将XIAO和Grove Vision AI V2连接起来。 :::
步骤 2. 启动Arduino应用程序。
步骤 3. 选择您的开发板型号并将其添加到Arduino IDE中。
- 如果您要在后续步骤中使用Seeed Studio XIAO SAMD21,请参考**此教程**进行设置。
- 如果您要在后续步骤中使用Seeed Studio XIAO RP2040,请参考**此教程**进行设置。
- 如果您要在后续步骤中使用Seeed Studio XIAO nRF52840,请参考**此教程**进行设置。
- 如果您要在后续步骤中使用Seeed Studio XIAO ESP32C3,请参考**此教程**进行设置。
- 如果您要在后续步骤中使用Seeed Studio XIAO ESP32S3,请参考**此教程**进行设置。
- 如果您要在后续步骤中使用Seeeduino V4.3,请参考**此教程**进行设置。
示例 1. 使用XIAO获取由Grove Vision AI V2报告的识别结果
以下步骤是一个简单的示例,可帮助您获取并解析由Grove Vision AI V2报告的识别信息。
#include <Seeed_Arduino_SSCMA.h>
SSCMA AI;
void setup()
{
AI.begin();
Serial.begin(9600);
}
void loop()
{
if (!AI.invoke())
{
Serial.println("invoke success");
Serial.print("perf: prepocess=");
Serial.print(AI.perf().prepocess);
Serial.print(", inference=");
Serial.print(AI.perf().inference);
Serial.print(", postpocess=");
Serial.println(AI.perf().postprocess);
for (int i = 0; i < AI.boxes().size(); i++)
{
Serial.print("Box[");
Serial.print(i);
Serial.print("] target=");
Serial.print(AI.boxes()[i].target);
Serial.print(", score=");
Serial.print(AI.boxes()[i].score);
Serial.print(", x=");
Serial.print(AI.boxes()[i].x);
Serial.print(", y=");
Serial.print(AI.boxes()[i].y);
Serial.print(", w=");
Serial.print(AI.boxes()[i].w);
Serial.print(", h=");
Serial.println(AI.boxes()[i].h);
}
for (int i = 0; i < AI.classes().size(); i++)
{
Serial.print("Class[");
Serial.print(i);
Serial.print("] target=");
Serial.print(AI.classes()[i].target);
Serial.print(", score=");
Serial.println(AI.classes()[i].score);
}
for (int i = 0; i < AI.points().size(); i++)
{
Serial.print("Point[");
Serial.print(i);
Serial.print("] target=");
Serial.print(AI.points()[i].target);
Serial.print(", score=");
Serial.print(AI.points()[i].score);
Serial.print(", x=");
Serial.print(AI.points()[i].x);
Serial.print(", y=");
Serial.println(AI.points()[i].y);
}
}
}
程序说明
此Arduino示例使用Seeed_Arduino_SSCMA库与Grove Vision AI模块V2进行通信。在setup()函数中,初始化了AI模块,并启动了串行通信。
loop()函数反复调用invoke()方法,使用Grove Vision AI模块V2的内置算法进行推理。在成功推理后,Sketch会将性能指标打印到串行监视器中,包括预处理、推理和后处理时间。
Sketch会处理并打印推理结果的详细信息,包括:
- 边界框 (
boxes()),以x和y坐标、宽度和高度的形式标识检测到的对象的位置和尺寸。 - 分类 (
classes()),标识检测到的对象的类别以及它们的置信度分数。 - 点 (
points()),表示检测到的对象的特定特征或关键点,以及它们的x和y坐标和置信度分数。
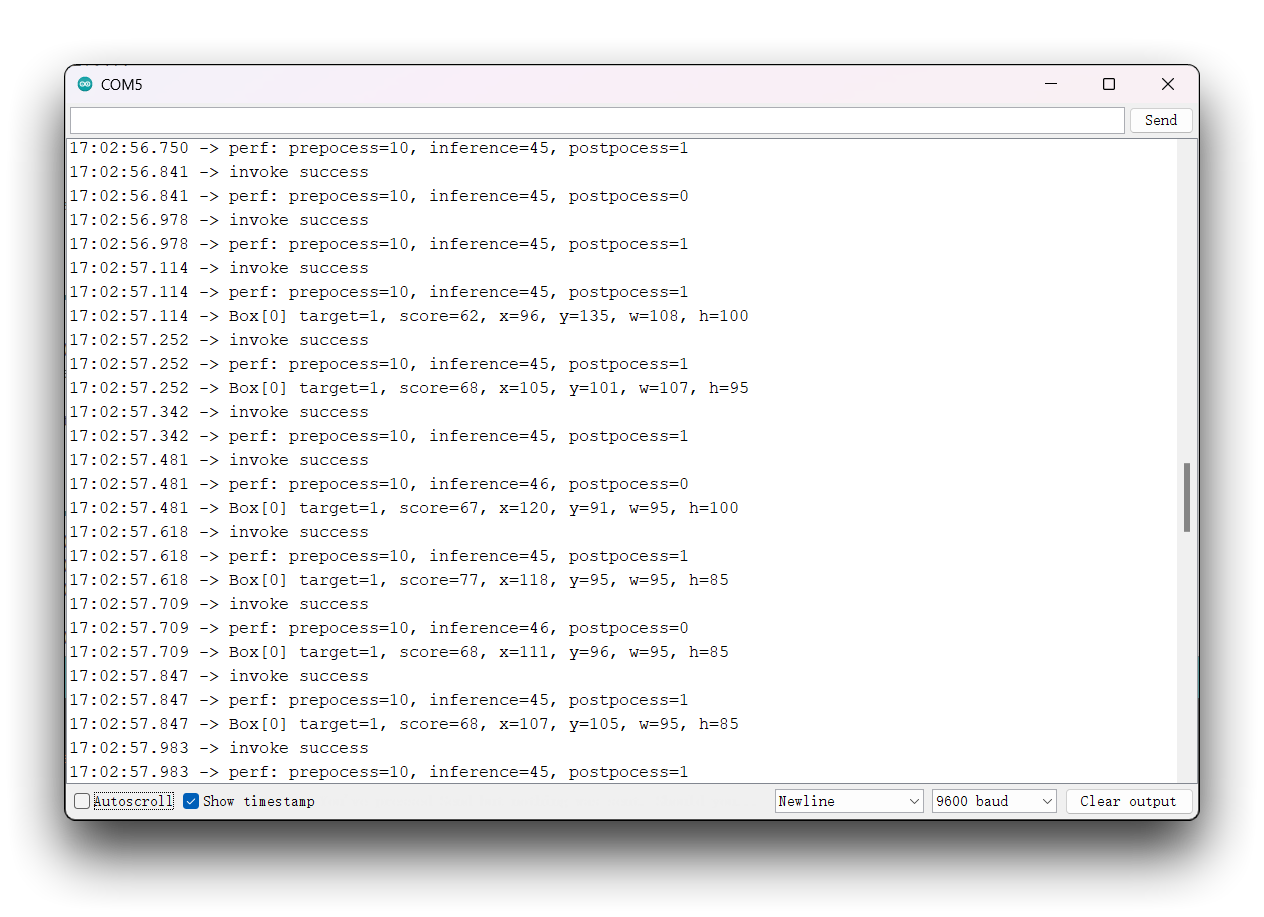
这些结果提供了关于AI模块检测到的对象、它们的位置、大小以及每个检测或分类的置信水平的见解。输出将打印到串行监视器中,以进行进一步的分析或调试。
效果
我们仍然使用手势检测模型。上传应用程序后,请打开串行监视器,并将串行监视器的波特率设置为 9600。准备好您的“剪刀-石头-布”,并将其对准摄像头的识别区域,串行监视器将输出识别结果。
演示 2. 使用XIAO与Grove Vision AI V2进行串行通信
Grove Vision AI V2支持通过UART协议进行通信,通过使用内置协议,可以操作Grove Vision AI V2的Himax WE2芯片。以下示例程序展示了如何使用XIAO通过串行端口与Grove Vision AI V2进行通信。
#include <Arduino.h>
#include <Wire.h>
#include <Seeed_Arduino_SSCMA.h>
SSCMA AI;
void setup()
{
// put your setup code here, to run once:
Wire.begin();
Serial.begin(115200);
while (!Serial)
delay(1000);
Serial.println("Proxy start");
}
char buf[512];
void loop()
{
int s_len = Serial.available();
if (s_len)
{
int len = Serial.readBytes((char *)buf, s_len);
AI.write(buf, len);
}
int t_len = AI.available();
if (t_len)
{
if (t_len > 512)
{
t_len = 512;
}
AI.read(buf, t_len);
Serial.write(buf, t_len);
}
}
程序说明
这个Arduino示例利用了Seeed Studio的机器学习框架SSCMA,在串行控制台和Grove Vision AI V2模块之间建立了通信接口。该示例旨在通过串行命令与Grove Vision AI V2模块之间传递数据。
以下是修改后的示例程序说明:
在 setup() 函数中:
- 初始化了I2C通信协议,使用
Wire.begin()可以与Grove Vision AI V2模块进行通信。 - 设置串行通信速率为115200。
- 等待串行连接激活,然后将 "Proxy start" 输出到串行监视器,表示代理通信通道已准备就绪。
在 loop() 函数中:
- 使用
Serial.available()检查传入的串行数据。如果有数据,将其读入名为buf的缓冲区。 - 将缓冲区中收集的数据通过
AI.write()方法发送给Grove Vision AI V2模块。 - 接下来,检查Grove Vision AI V2模块是否有数据发送回来,使用
AI.available()。 - 如果Grove Vision AI V2模块发送了数据,则使用
AI.read()将这些数据读入缓冲区buf中,确保数据不超过512字节的缓冲区大小。 - 最后,使用
Serial.write()将从Grove Vision AI V2模块接收到的数据传输回串行控制台,完成串行接口和视觉AI模块之间的双向通信。
这个设置允许与Grove Vision AI V2模块进行交互式通信,使用户能够通过串行连接向模块发送指令并接收来自模块的数据。
故障排除
Q1:Grove Vision AI能否在输出实时屏幕的同时查看XIAO的结果信息?
不行。考虑到帧率或图像推理的速度,我们目前不支持同时执行两项工作。如果连接了XIAO,则只能接收报告的识别信息,而不能实时获取画面。
Q2:Grove Vision AI V2支持哪些摄像头?它只支持OV5647-62吗?
目前我们为OV5642系列摄像头编写了驱动程序,因此Grove Vision AI V2支持全系列的树莓派OV5647摄像头,例如OV5647-62、OV5647-67和OV5647-160。理论上支持其他CSI摄像头,但由于一些摄像头没有为其编写驱动程序,或者它们自身没有颜色处理单元,因此可能会出现颜色仅为绿色的问题,完整颜色的丢失可能会对识别的准确性产生影响。
资源
- [PDF] 数据手册
- [GitHub] Seeed Grove Vision AI 模块 V2 SDK
技术支持与产品讨论
感谢您选择我们的产品!我们在这里提供不同的支持,以确保您对我们的产品的体验尽可能顺利。我们提供多种沟通渠道,以满足不同的偏好和需求。