高扭矩电机入门指南
本手册适用于 高扭矩调试助手 v0.11.1 及以上版本。 高扭矩调试助手适用于电机固件 v3.1.0 及以上版本。
1. 电机使用指南
🔌 电机硬件接线
在进行任何连接之前,请务必确保电源已断开。
| 规格 | 数值 |
|---|---|
| 额定电压 | 24VDC |
| 通信方式 | FDCAN(通过 USB-C 模块) |
| 电机型号 | 5047、4438 等 |
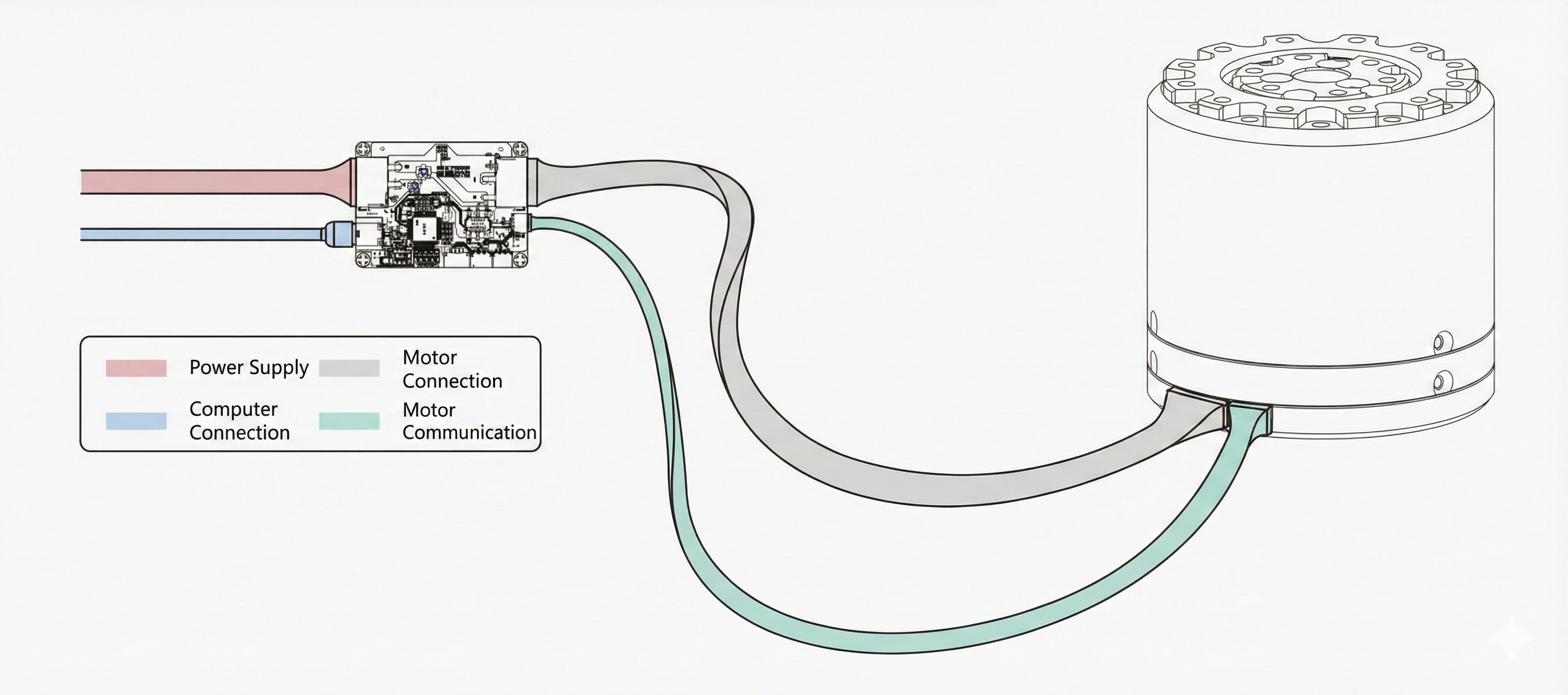
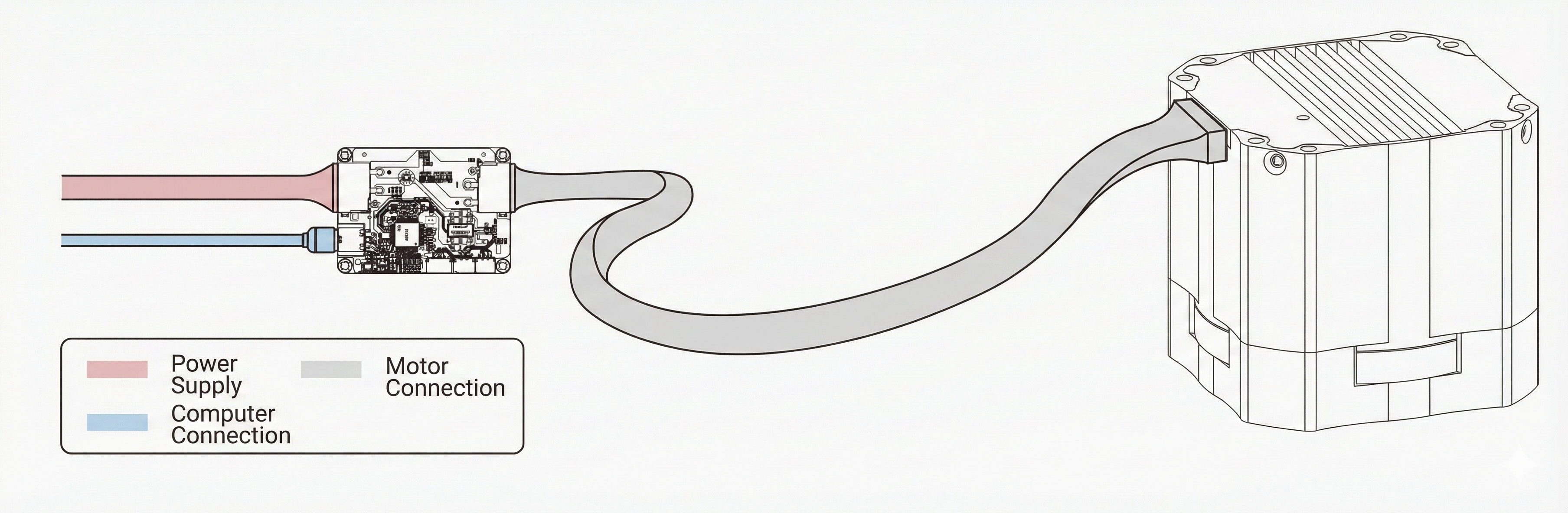
连接步骤
-
电源连接 🔌 将 24V 电源连接到 FDCAN 模块
-
电机接口 🔌 使用 GH1.25-3P 线缆将电机 XT30(2+2)接口连接到 FDCAN 模块
-
PC 连接 💻 通过 USB-C 将 FDCAN 模块连接到计算机
2. 高扭矩电机调试助手使用说明
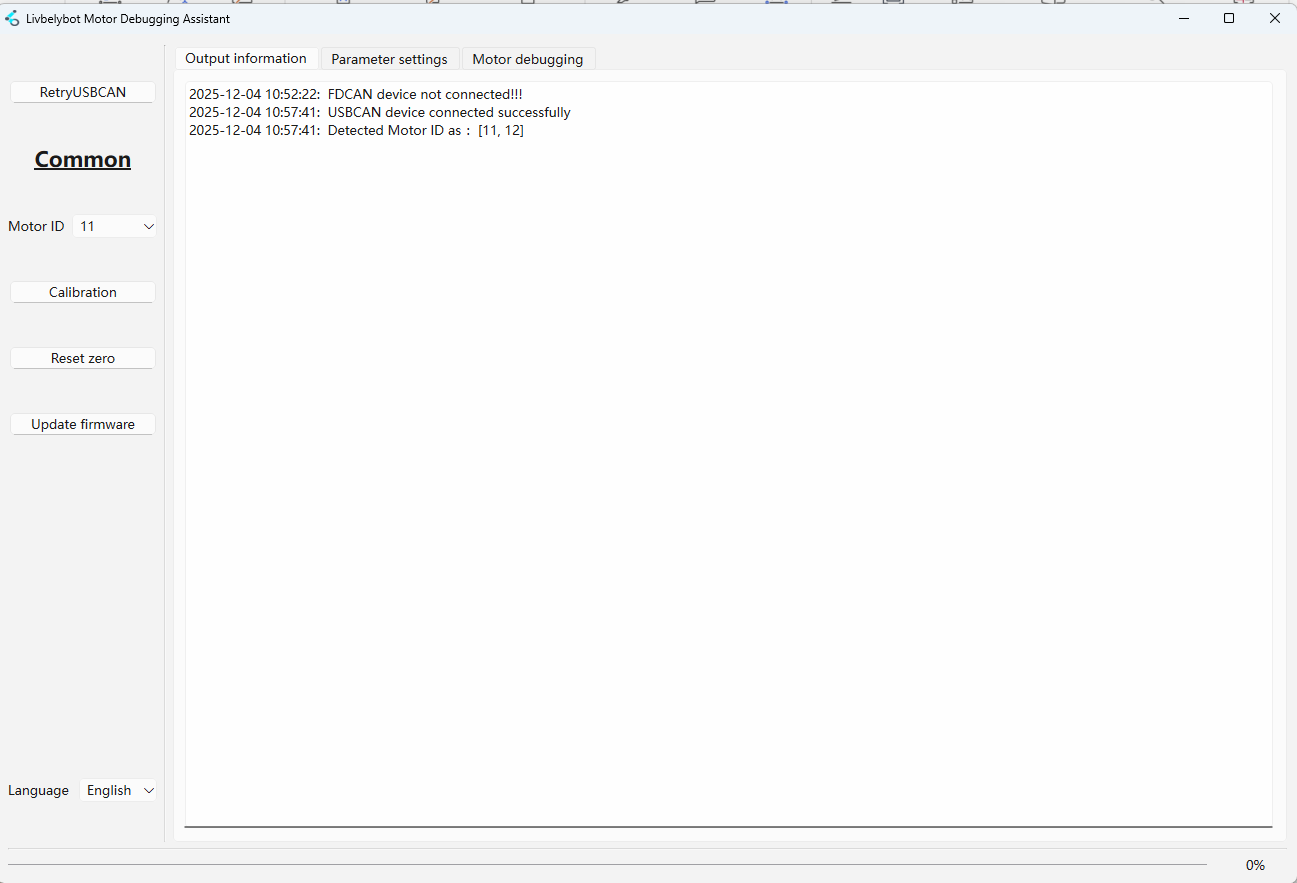
🎛️ 常用功能
| 功能 | 描述 |
|---|---|
| 🔄 重新连接 USBCAN 设备 | 扫描并连接 USBCAN 设备,检测已连接的电机 |
| 🆔 电机 ID | 当前连接电机的下拉选择器 |
| ⚙️ 电机校准 | 重新校准电机(⚠️ 电机必须空载) |
| 🎯 重置当前电机零点 | 将当前位置设置为零点参考 |
| 💾 更新电机固件 | 下载并刷写新固件到电机 |
| 📊 输出信息 | 事件和错误的实时日志控制台 |
电机校准必须在电机无负载状态下进行。否则将导致编码器偏移计算不准确。
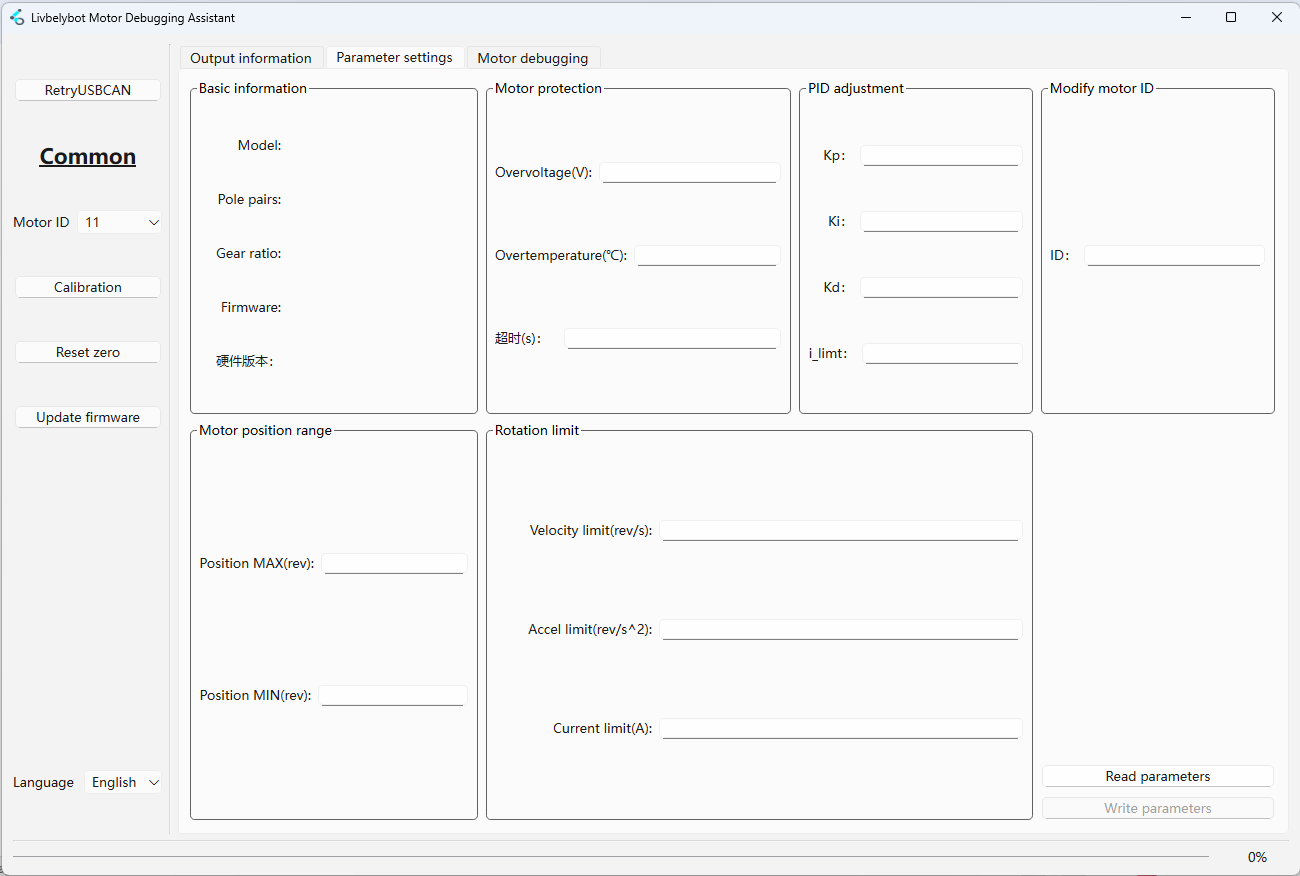
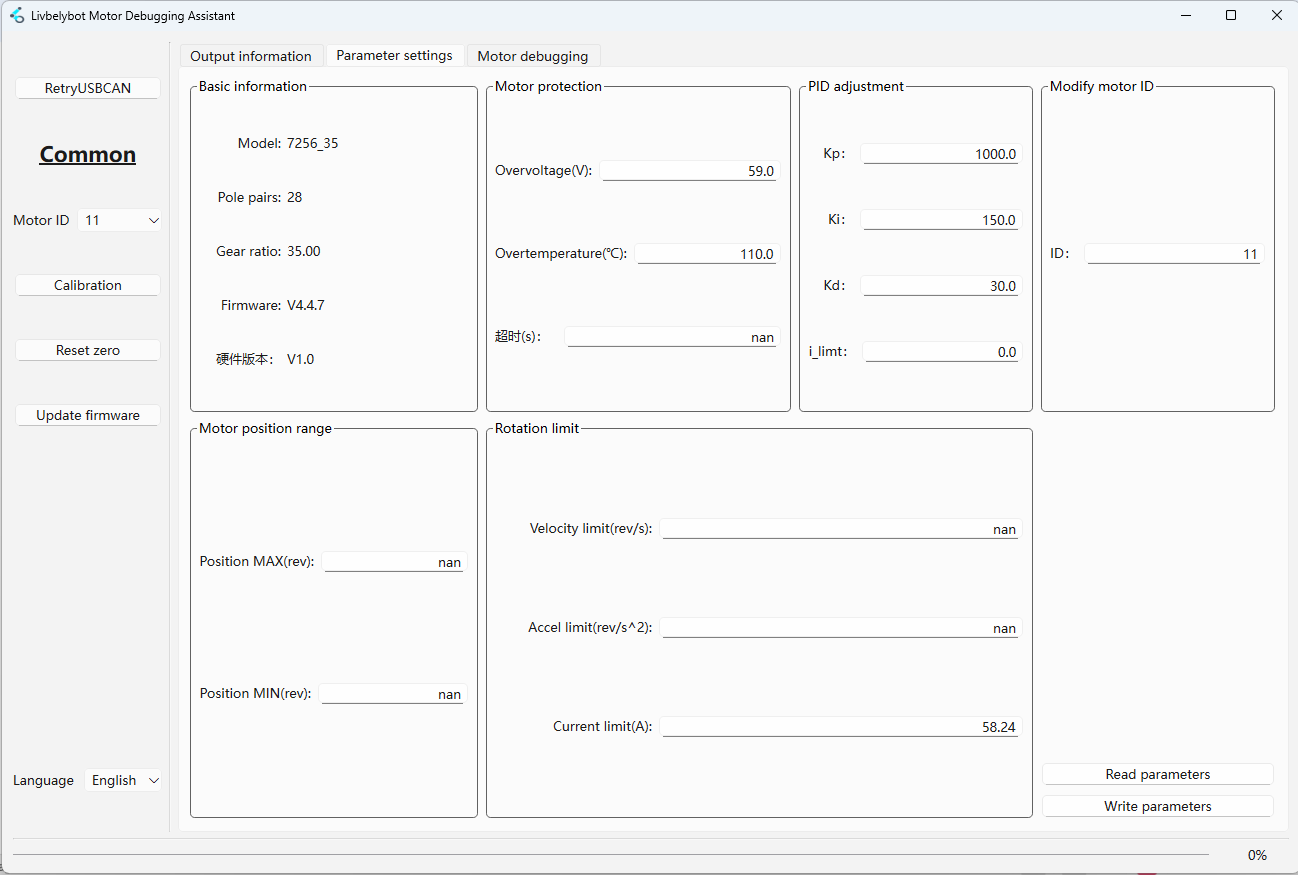
使用 Read Parameters 获取当前设置,使用 Write Parameters 将更改保存到电机。
| 参数组 | 描述 |
|---|---|
| 📋 基本信息 | 显示型号、极对数、减速比、固件版本 |
| 🛡️ 电机保护 | 过压(V)和过温(°C)限制 |
| ⚖️ PID 调节 | Kp、Ki、Kd 系数 + i_limit(积分限制) |
| 🆔 修改电机 ID | 更改电机 ID(需要重新识别) |
| 📍 电机位置范围 | 位置最大/最小限制(设置为 nan 表示无限制) |
| 🚀 旋转限制 | 速度(rev/s)、加速度(rev/s²)、电流(A)限制 |
在位置范围和旋转限制部分,将值设置为 nan 表示无限制操作。
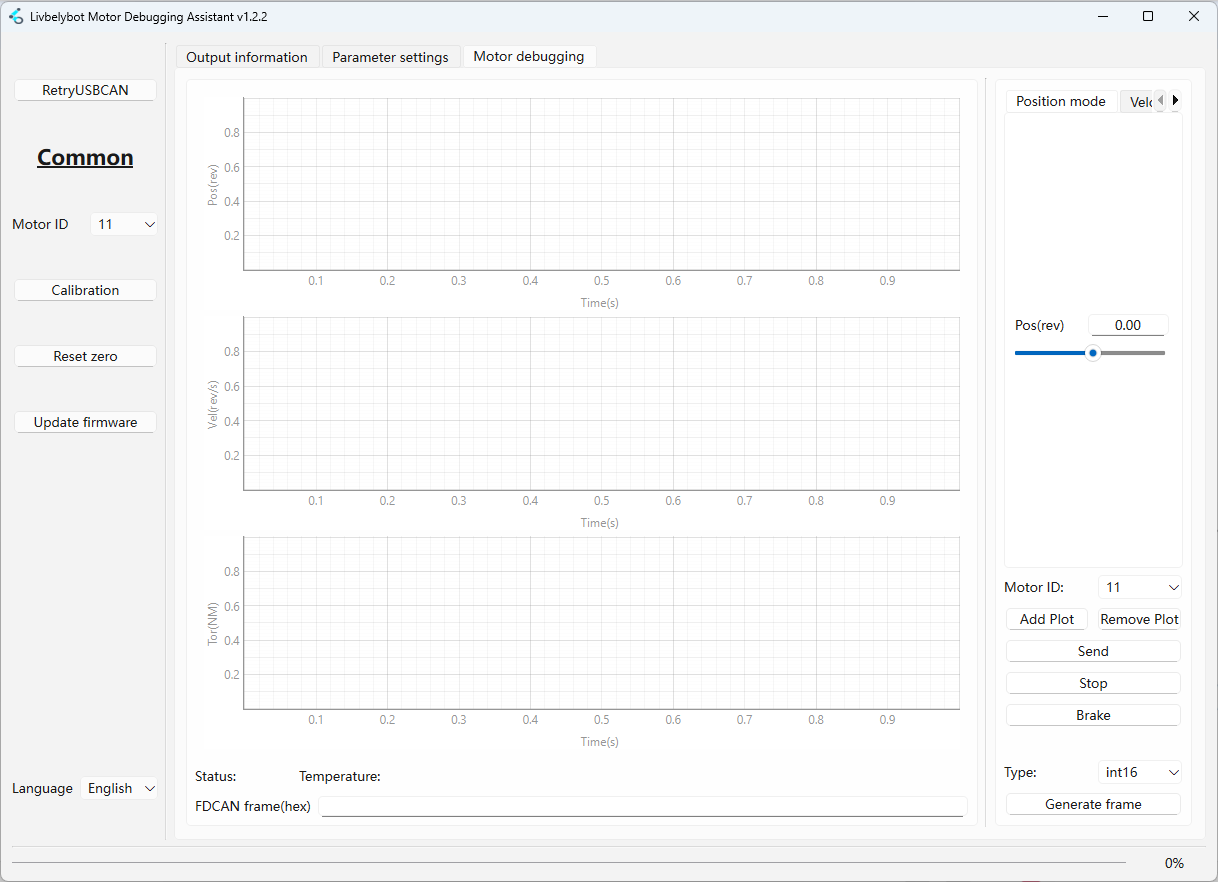
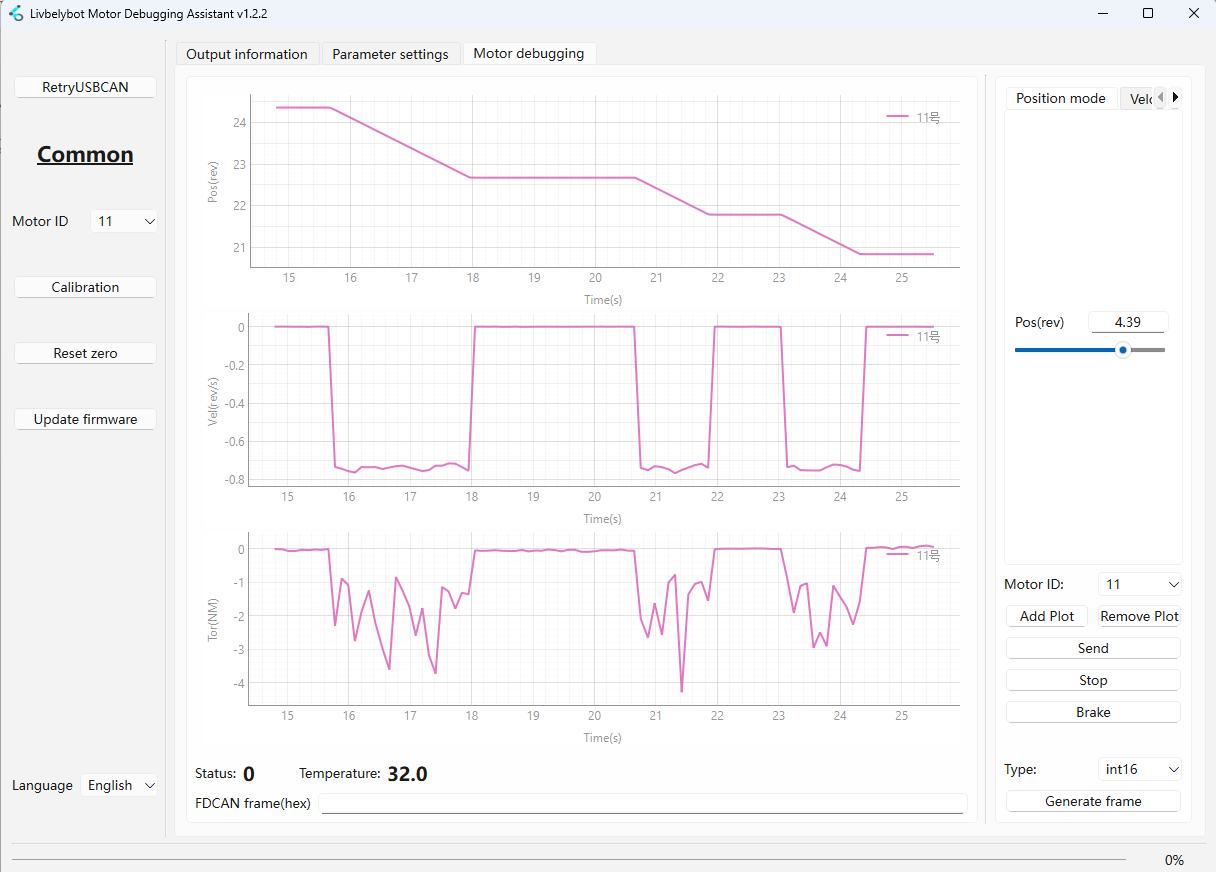
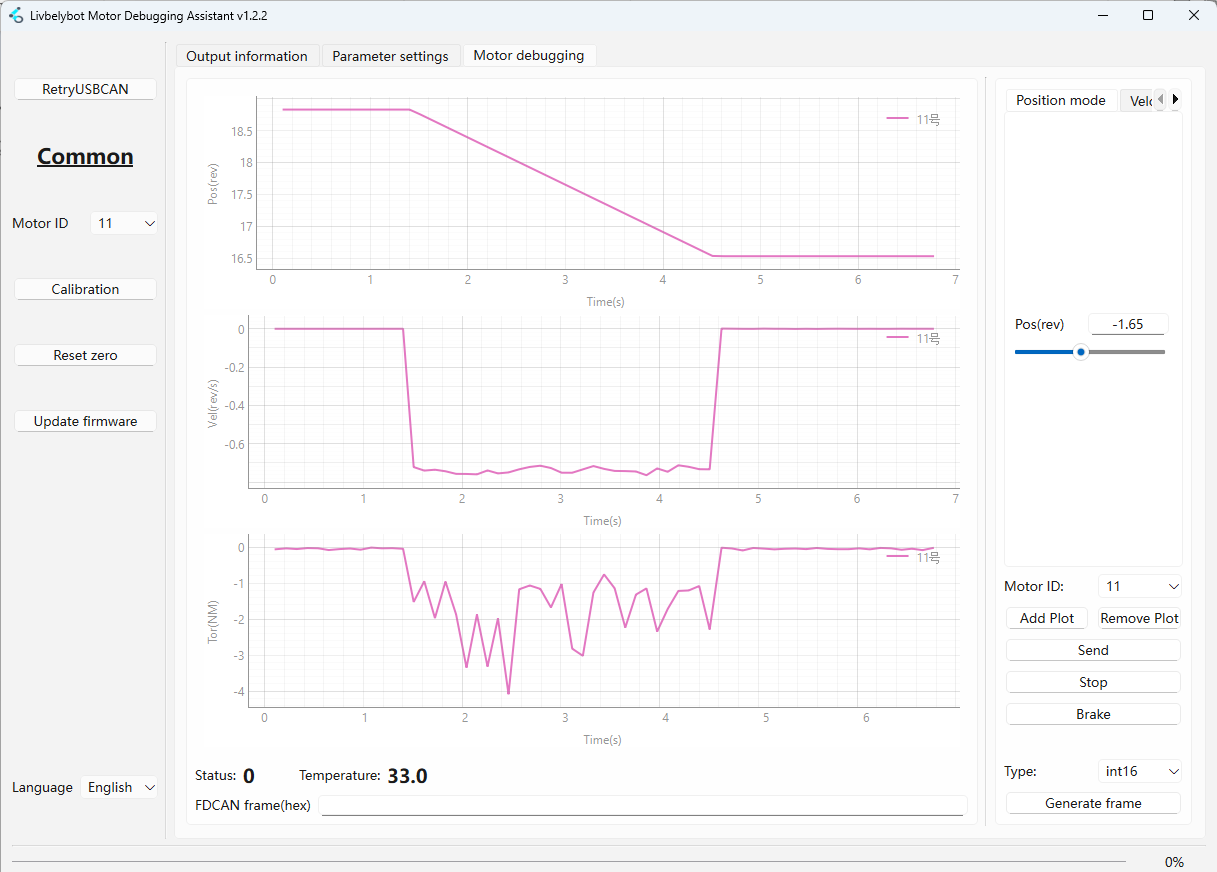
🔧 电机调试
使用不同的运行模式进行调试(详细信息请参见电机运行模式)。
| 功能 | 描述 |
|---|---|
| 📈 电机运行模式 | 点击 "Add Waveform" 实时可视化位置、速度、扭矩、温度 |
| 📊 电机状态 | FDCAN 帧信息(float、int16、int32、CAN 帧) |
| 🛠️ 生成帧 | 为开发创建自定义 CAN 帧 |
| 🛑 停止和制动 | 控制电机停止行为 |
帧生成类型
- 数值类型
- CAN 帧
float、int16、int32
有关实现示例和数据类型处理,请参考本节中的 FDCAN 协议示例
CAN 帧
有关 CAN 帧生成和处理示例,请参考协议实现指南
停止和制动控制
| 控制 | 行为 |
|---|---|
| 🛑 停止 | 断开所有三相 - 电机通过惯性滑行停止 |
| ⚡ 制动 | 将所有三相短路到地 - 电机立即停止 |
🎮 电机运行模式
- 1️⃣ 位置模式
- 2️⃣ 速度模式
- 3️⃣ 扭矩模式
- 4️⃣ 电压模式
- 5️⃣ 电流模式
- 6️⃣ 位置+速度+扭矩
- 7️⃣ 梯形控制
- 8️⃣ 运动控制
位置模式 🎯
为电机轴提供精确的角度控制。输入目标位置(以转数为单位)并点击发送。电机将使用位置环 PID 控制移动到精确指定的位置。
**适用于:**机器人关节、CNC 机床、执行器系统
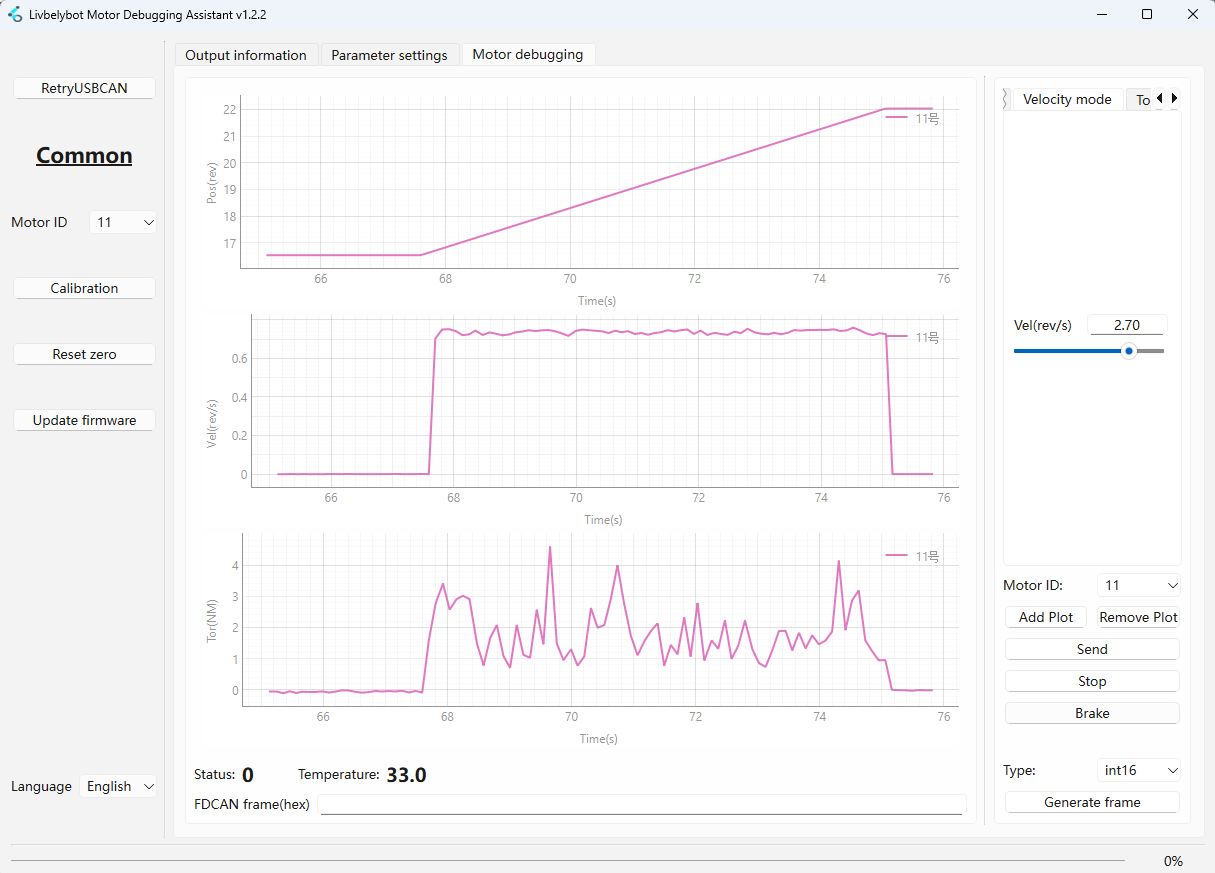
速度模式 🔄
无论负载变化如何(在容量范围内),都保持恒定的旋转速度。输入目标速度(rev/s)并点击发送。电机将使用配置的加速度限制加速到指定速度。
**适用于:**传送带、风扇、旋转台
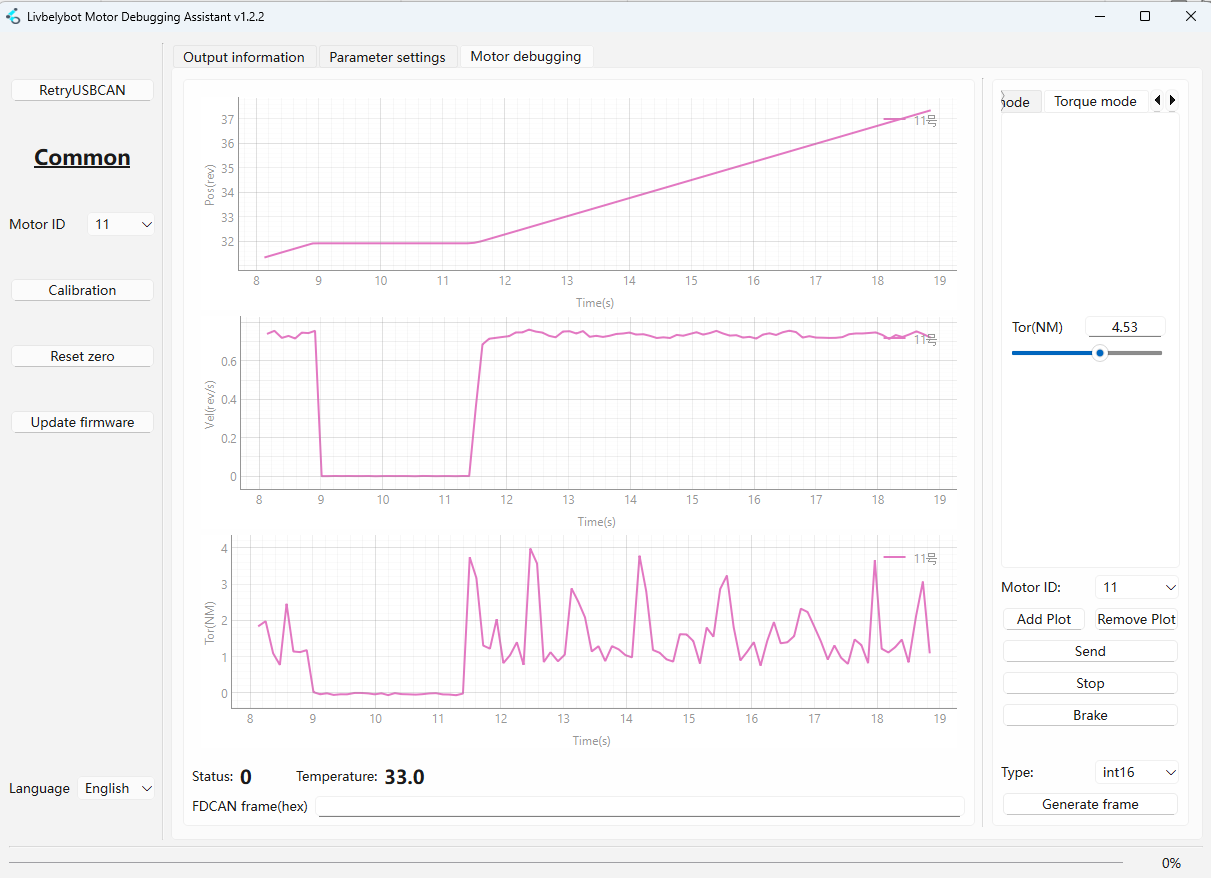
扭矩模式 💪
直接控制输出扭矩。电机将尝试保持指定的扭矩值,无论速度如何。如果外部阻力超过设定扭矩,电机将停转以保护系统。
**单位:**牛顿米(Nm)
**适用于:**张紧系统、压装操作、负载保持
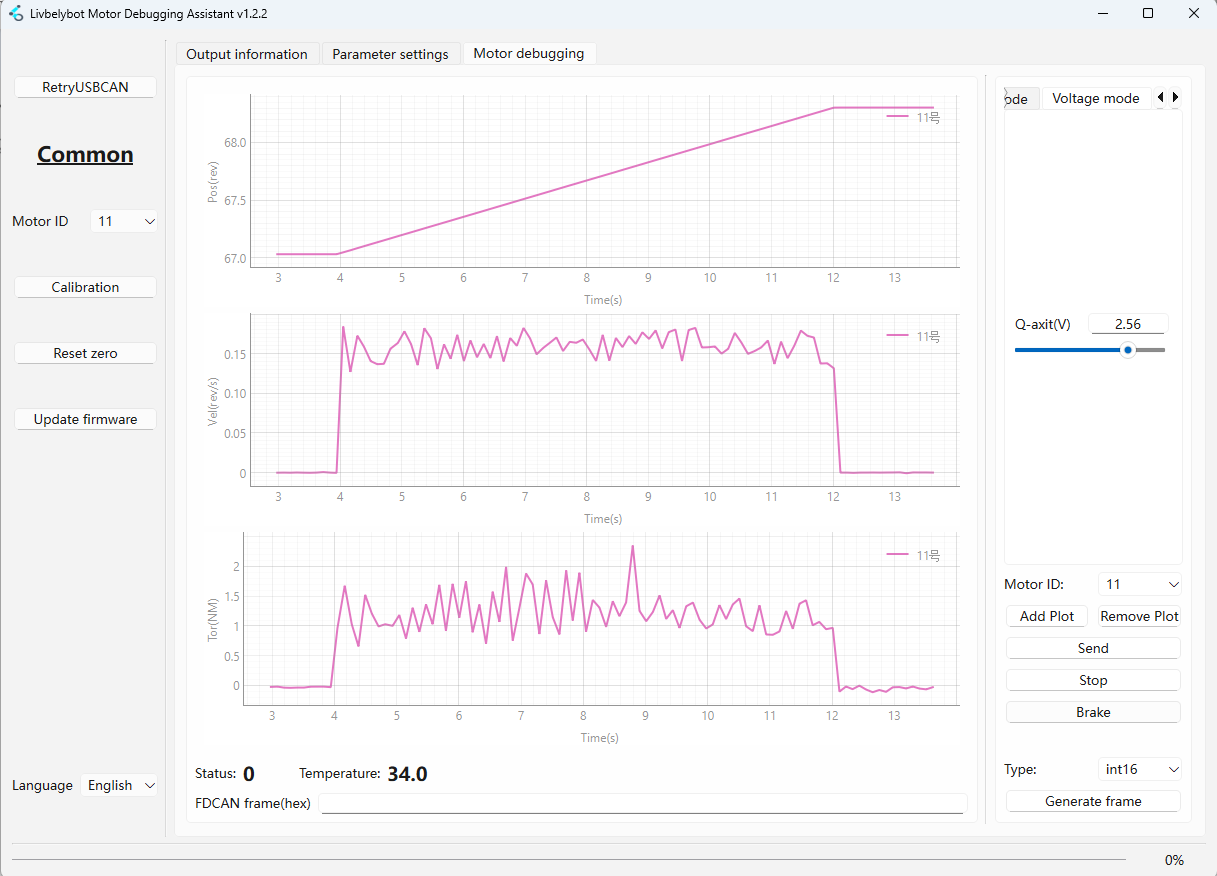
电压模式 ⚡
提供对施加到电机的 Q 轴电压的直接控制。这种高级模式允许自定义控制算法,通常用于研究应用或专用控制系统。
**单位:**伏特(V)
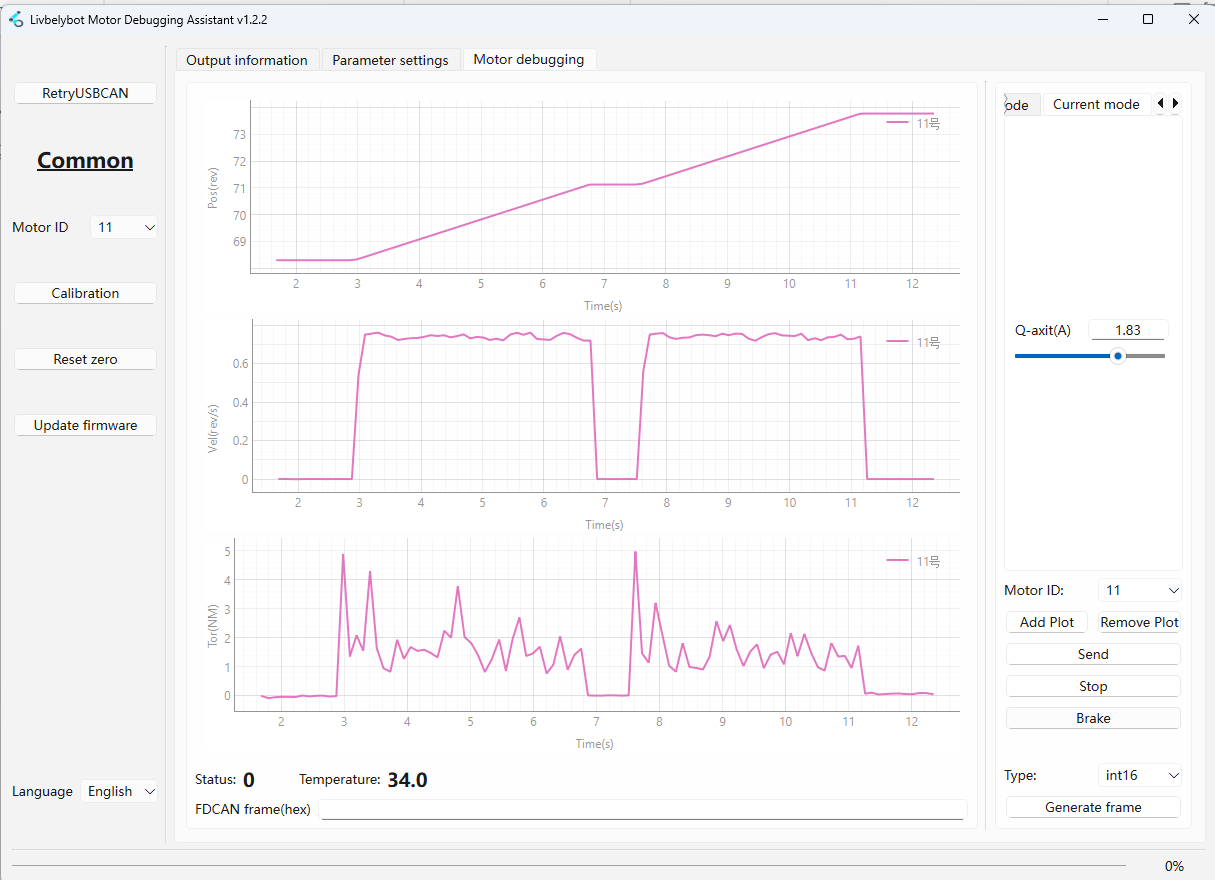
电流模式 🔋
控制流过电机绕组的 Q 轴电流。这种模式比扭矩模式提供更直接的扭矩生成控制,因为电流是磁场强度的基本驱动因素。
**单位:**安培(A)
**适用于:**精确扭矩控制应用
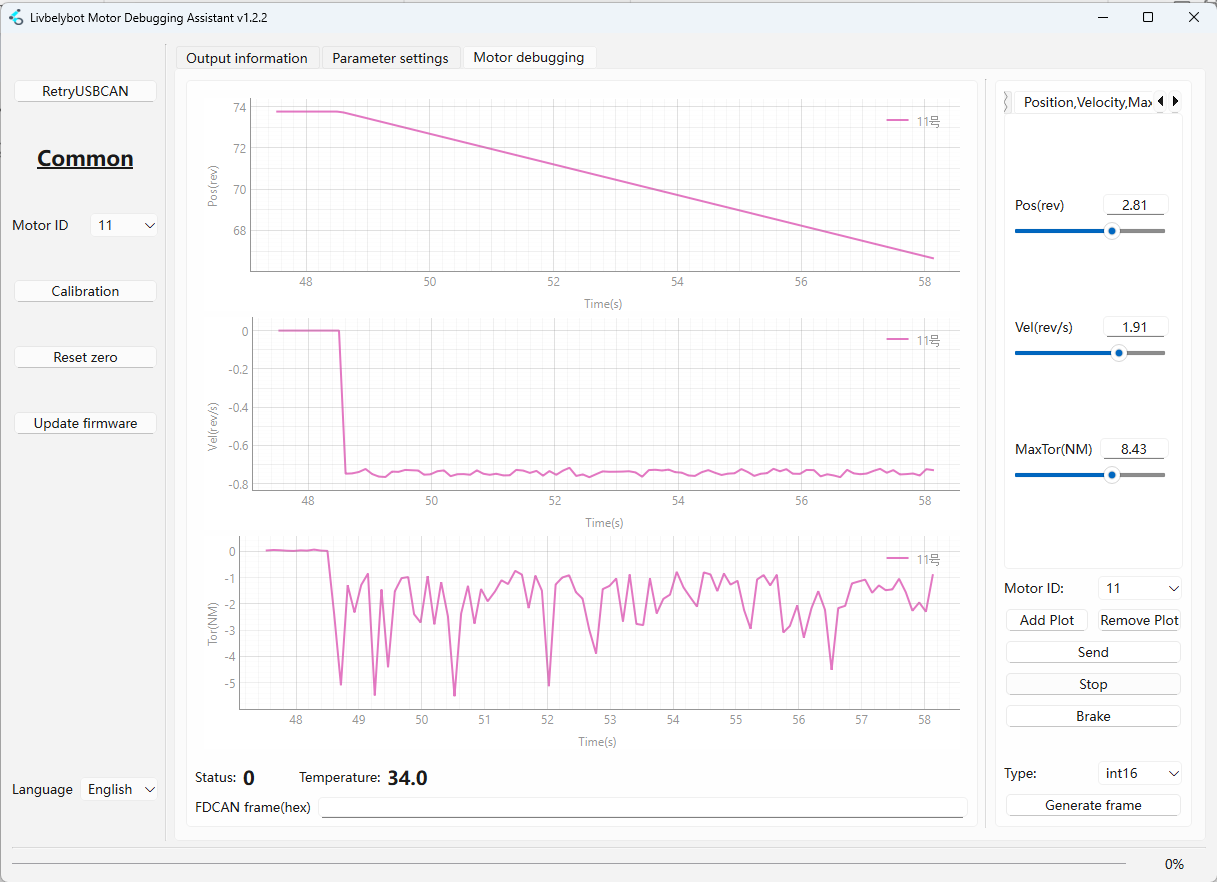
位置、速度、最大扭矩 🎛️
结合位置控制与速度和扭矩限制的混合模式,实现安全、受控的运动。电机将以目标速度移动到指定位置,同时确保输出扭矩永远不超过最大限制。
**适用于:**机器人夹爪、门执行器、力限制应用
如果不需要扭矩限制,请将最大扭矩设置为 nan。
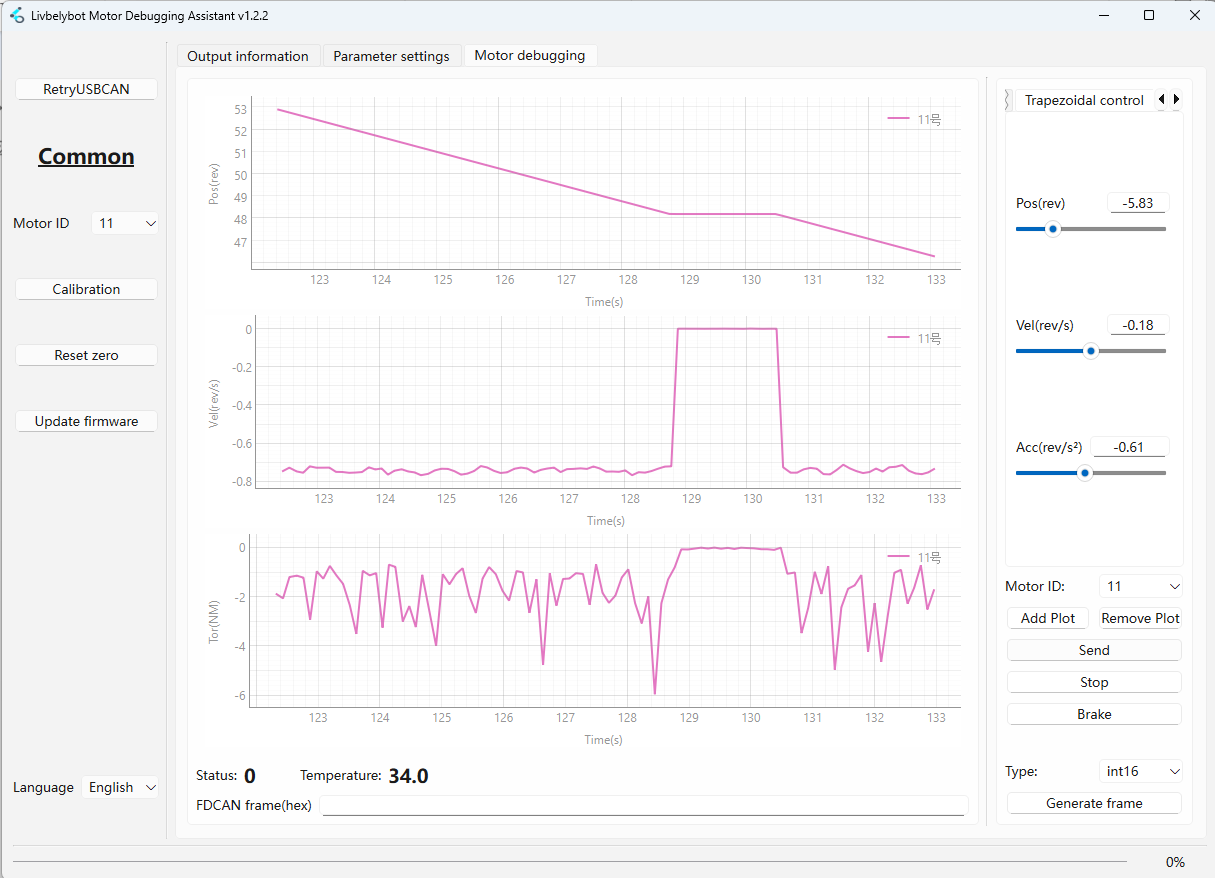
梯形控制 📈
生成具有受控加速和减速阶段的平滑 S 曲线轨迹。电机将:1)均匀加速到最大速度,2)保持恒定速度,然后 3)均匀减速以精确停在目标位置。
**适用于:**拾取和放置操作、CNC 定位、精密自动化
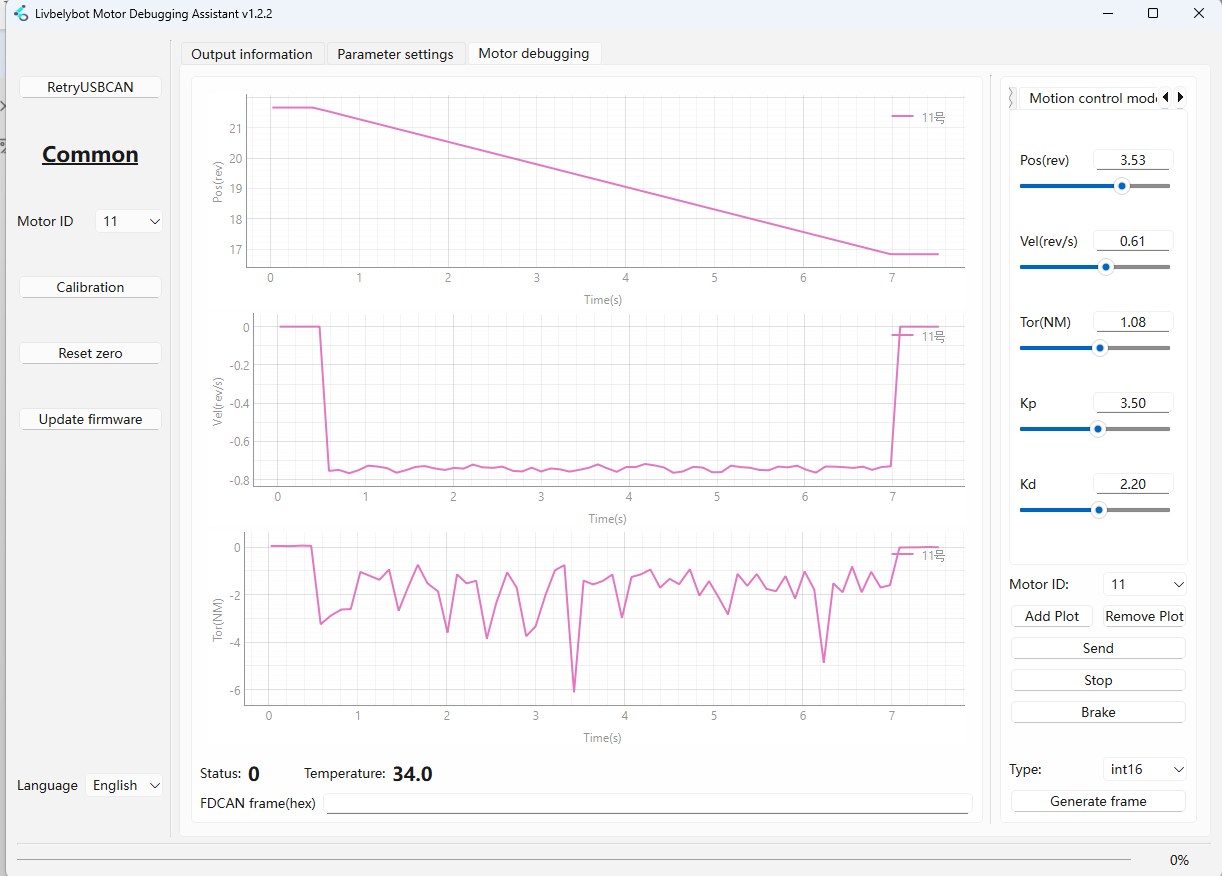
运动控制模式 🤖
使用以下公式的高级基于 PID 的控制模式:
电机输出扭矩 = Kp × 位置误差 + Kd × 速度误差 + 前馈扭矩
这种模式结合位置误差(P 项)和速度误差(D 项)进行复杂的运动控制。
**适用于:**高精度应用、伺服压机、力控装配
3. 🔌 FDCAN 协议分析
本节涵盖基本电机控制操作的基本 FDCAN 协议信息。有关全面的寄存器映射和高级协议详细信息,请参考电机控制文档。
示例:int32 数据帧速度模式
以 int32 数据帧速度模式为例:
01000a0a2000000080204e0000
1️⃣ 子帧 1 - 电机模式配置
此子帧配置电机操作模式。
| 字段 | 值 | 描述 |
|---|---|---|
| 0x01 | 头部 | 第一个子帧的开始 |
| 位 7-4 | 0000 | 写操作到电机寄存器 |
| 位 3-0 | 0001 | 数据类型 int8_t,1 个数据单元 |
| 0x00 | 寄存器地址 | 电机模式设置寄存器 |
| 0x0a | 数据 | 将电机设置为速度模式 |
2️⃣ 子帧 2 - 运动参数
此子帧配置运动参数(位置和速度目标)。
| 字段 | 值 | 描述 |
|---|---|---|
| 0x02 | 帧头 | 第二个子帧的开始 |
| 位 7-4 | 0000 | 写操作 |
| 位 3-0 | 0010 | 数据类型 int32_t,2 个数据单元 |
| 0x20 | 寄存器起始 | 位置目标寄存器 (0x20) |
| 0x00 0x00 0x00 0x80 | 位置数据 | 0x80000000 = 位置 无限制/NaN |
| 0x20 0x4e 0x00 0x00 | 速度数据 | 0x00004e20 = 20000 (十进制) |
速度计算:
- 十进制值: 20000
- LSB 权重: 每单位 0.00001 rev/s
- 目标速度: 20000 × 0.00001 = 0.2 rev/s
📚 附录
⚠️ 电机错误代码参考
非零值表示错误。请参考下表了解具体原因和解决方案。
| 代码 | 错误名称 | 描述 | 解决方案 |
|---|---|---|---|
| 32 | 🔧 校准故障 | 校准期间编码器无法检测到磁铁 | 确保磁铁正确安装;在无负载情况下重新校准 |
| 33 | ⚡ 电机驱动器故障 | 欠压或电流不足 | 检查电源电压和电流容量 |
| 34 | 🔺 过压 | 总线电压超过限制 | 验证电源电压额定值 |
| 35 | 📡 编码器故障 | 编码器读取错误 | 检查编码器连接和接线 |
| 36 | 🚫 电机未校准 | 电机尚未校准 | 在无负载情况下运行校准程序 |
| 37 | 📊 PWM 周期限制超出 | 内部固件错误 | 联系技术支持 |
| 38 | 🌡️ 过温 | 温度超过最大限制 | 让电机冷却;检查散热 |
| 39 | 🎯 超出范围 | 位置控制超出定义限制 | 调整位置范围参数 |
| 40 | 🔋 低电压 | 供电电压过低 | 检查电源和连接 |
| 41 | ⚙️ 配置已更改 | 运行期间关键配置发生更改 | 更改参数前停止电机 |
| 42 | 🔄 角度无效 | 无有效换向编码器 | 检查编码器功能和连接 |
| 43 | 📍 位置无效 | 无有效输出编码器 | 验证输出编码器连接 |
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。