Isaac ROS AprilTag
前置条件
在部署 AprilTag 之前,请确保 Isaac ROS 基础环境已在您的 reComputer 上成功设置完成 安装指南。如果尚未安装 ROS2,请参考 此文档。
Isaac ROS AprilTag 包的主题
订阅的主题:
| ROS 主题 | 接口 | 描述 |
|---|---|---|
| image | sensor_msgs/Image | 输入摄像头流。 |
| camera_info | sensor_msgs/CameraInfo | 输入摄像头内参流。 |
发布的主题:
| ROS 主题 | 类型 | 描述 |
|---|---|---|
| tag_detections | isaac_ros_apriltag_interfaces/AprilTagDetectionArray | AprilTag 检测消息数组。 |
| tf | tf2_msgs/TFMessage | 检测到的 AprilTag(TagFamily:ID)相对于摄像头 frame_id 的位姿。 |
1. Isaac ROS AprilTag 环境设置
创建工作空间(如果已完成可跳过)
mkdir -p ~/workspaces/isaac_ros-dev/src
echo "export ISAAC_ROS_WS=${HOME}/workspaces/isaac_ros-dev/" >> ~/.bashrc
source ~/.bashrc
克隆包和 ROS Bag 数据
cd ${ISAAC_ROS_WS}/src
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_apriltag.git
cd ${ISAAC_ROS_WS}/src/isaac_ros_apriltag && \
git lfs pull -X "" -I "resources/rosbags/quickstart.bag"
进入 Docker 容器
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
2. 使用 ROS Bag 数据进行测试
安装 AprilTag 包(在 Docker 内)
sudo apt-get install -y ros-humble-isaac-ros-apriltag
启动 AprilTag 节点
ros2 launch isaac_ros_apriltag isaac_ros_apriltag.launch.py
打开新终端(在 Docker 内)
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
播放 ROS Bag
ros2 bag play --loop src/isaac_ros_apriltag/resources/rosbags/quickstart.bag
在 RViz2 中可视化
在本地终端打开 RViz2,并添加 Image 和 TF 组件:
ros2 run rviz2 rviz2

3. 使用 USB 摄像头进行测试
确保本地已安装 ROS2。
创建 USB 摄像头工作空间
cd ~/
mkdir -p usbcam/src
cd usbcam/src
克隆并构建 usb_cam 包
git clone https://github.com/ros-drivers/usb_cam.git
cd ..
colcon build
echo "source ~/usbcam/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
检查摄像头格式
连接摄像头并验证其设备路径(例如 /dev/video*)。测试命令:
cd ~/usbcam
ros2 run usb_cam usb_cam_node_exe

支持的像素格式:
rgb8, yuyv, yuyv2rgb, uyvy, uyvy2rgb, m4202rgb, mono8, mono16, y102mono8, raw_mjpeg
配置摄像头
- 修改
/usbcam/src/usb_cam/config/params_1.yaml中的pixel_format。
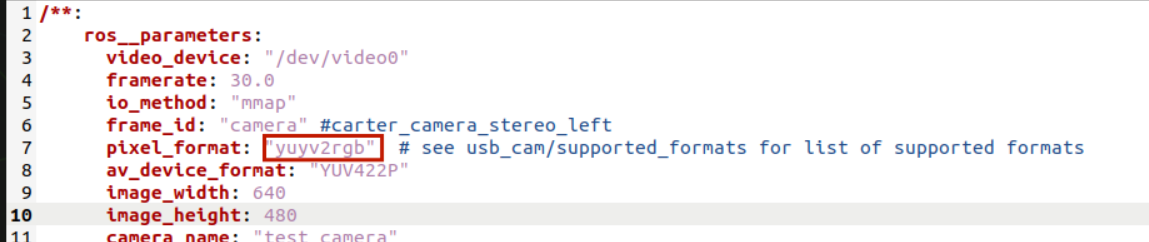
- 调整
frame_id(默认值:camera)。 - 在
/usbcam/src/usb_cam/launch/camera_config.py中修改主题名称(第 58 和 62 行),以匹配 AprilTag 的要求(/image和/camera_info)。

重新构建并启动摄像头
cd ~/usbcam
colcon build
ros2 launch usb_cam camera.launch.py
运行 AprilTag 节点(在 Docker 内)
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
ros2 launch isaac_ros_apriltag isaac_ros_apriltag.launch.py
在 RViz2 中可视化
将 Fixed Frame 设置为摄像头的 frame_id,添加订阅 /image 的 Image 组件,并启用 TF。
注意:此测试使用 200mm × 200mm 的 AprilTag。

技术支持与产品讨论
感谢您选择我们的产品!我们为您提供多种支持渠道,以确保您使用我们的产品时体验顺畅。我们提供多种沟通方式,以满足不同的偏好和需求。