Docker 入门指南
这是 Ajeet 在 collabnix.com 上撰写的博客的转载。所有功劳归于他。
上周,我很幸运地第一次接触到了 Seeed Studio 最新的 reComputer J1020 边缘 AI 设备。reComputer J1020 由 Jetson Nano 开发套件驱动。它是一台小巧的、手掌大小的强大计算机,为嵌入式开发者带来了现代 AI 的力量。这台售价 259 美元的小型设备围绕 NVIDIA Jetson Nano 系统模块构建,专为边缘 AI 应用而设计。该设备让您能够并行运行多个神经网络,用于图像分类、目标检测、分割和语音处理等应用。凭借丰富的扩展模块、工业外设和热管理,reComputer J1020 已准备好帮助您通过将流行的 DNN 模型和 ML 框架部署到边缘并进行高性能推理,来加速和扩展下一代 AI 产品,用于实时分类和目标检测、姿态估计、语义分割和自然语言处理 (NLP) 等任务。
reComputer J1020 的独特之处是什么?
Seeed Studio reComputer J1020 提供了开始构建基于 AI 应用程序所需的一切。与 NVIDIA 提供的 Jetson Nano 开发套件相比,它不需要从头开始在 SD 卡上刷写操作系统。它在 16 GB eMMC 上预装了 Ubuntu 操作系统。reComputer 预装的 Jetpack 4.6 包括板级支持包 (BSP)、Linux 操作系统、NVIDIA CUDA、cuDNN 和用于深度学习、计算机视觉、GPU 计算、多媒体处理等的 TensorRT 软件库。它支持整个 Jetson 软件栈和 Seeed 边缘 AI 合作伙伴提供的各种开发者工具,用于构建快速且强大的 AI 应用程序。
几个值得注意的特性包括
- 128 个 NVIDIA CUDA® 核心 – 提供 0.5 TFLOPs (FP16) 来运行 AI 框架和模型,用于图像分类、目标检测、分割和语音处理等应用。
- 配备 Armv8 处理器
- 配备 NVIDIA Tegra X1(nvgpu)/集成
- 磁盘大小为 16GB
- 4GB 内存
- 64 位操作系统类型
- Ubuntu 18.04.5
- Seeed Studio reComputer 预装了 JetPack 4.6 系统
- 您无需刷写 SD 卡,它预装了操作系统
- 支持 CUDA 10.2.300
- CUDA 架构:5.3
- OpenCV 版本:4.1.1
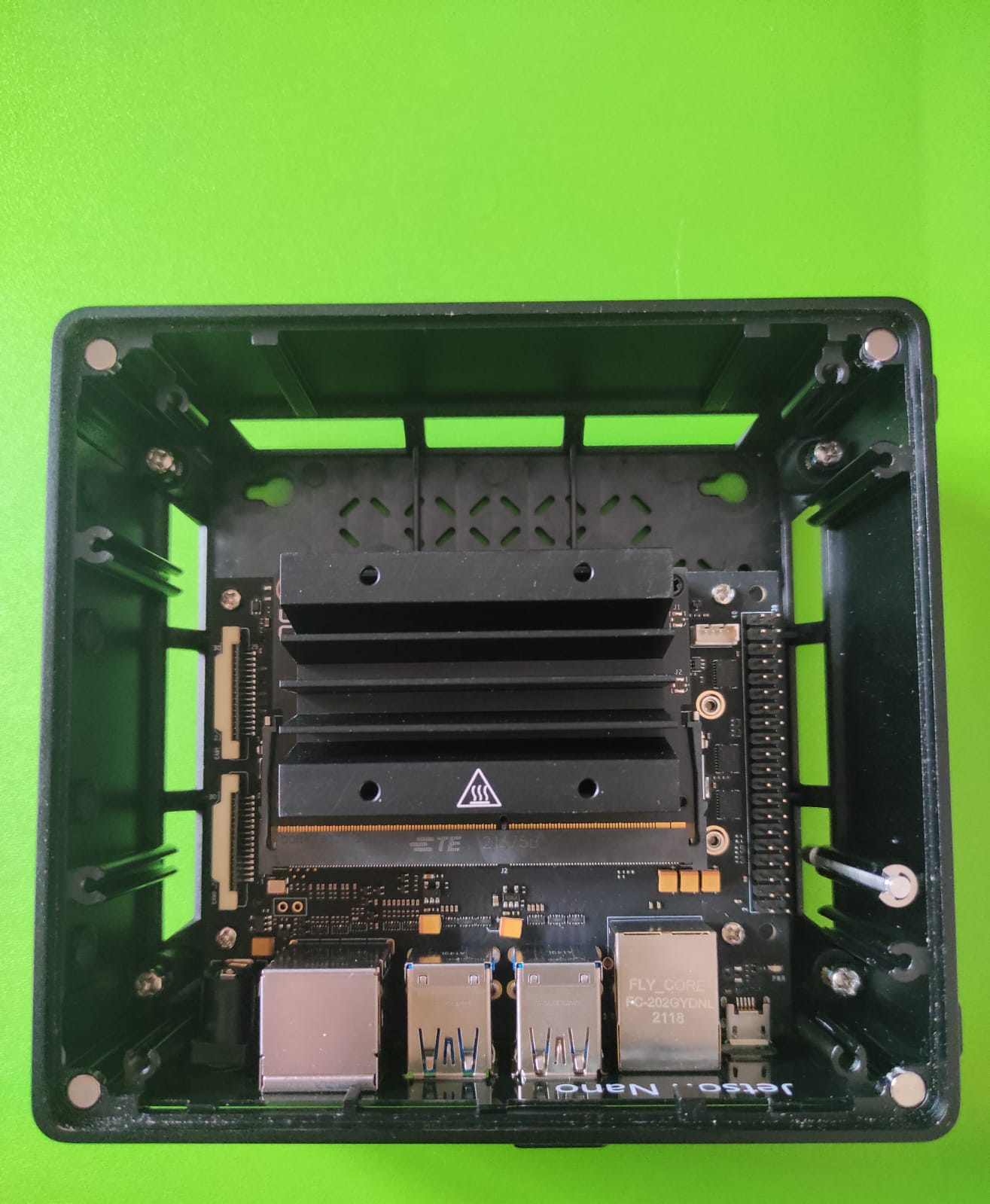
reComputer 的组件
它包含以下部件清单:
- NVIDIA Jetson Nano x1
- Seed 参考载板 x1
- 被动式铝制散热器 x1
- 铝制外壳 x1
- 12V 电源适配器 x1
- 4x USB 3.0 端口
- 2x HDMI 端口
- MIPI-CSI 摄像头连接器
- 控制和 UART 接头
- 40 针扩展接头(GPIO, I2C, Header)
- 260 针 SODIMM
- MicroUSB
- 千兆以太网端口
- LED 指示灯
硬件设置
要开始使用,您需要连接以下最基本的连接器:
- 电源线
- WiFi 模块 / 千兆以太网线
- WiFi 键盘和鼠标的 USB 接收器
- HDMI 连接到您的显示器

运行 CUDA deviceQuery
cd /usr/local/cuda/samples/1_Utilities/deviceQuery
sudo make
./deviceQuery
Here’s the results:
./deviceQuery Starting...
CUDA Device Query (Runtime API) version (CUDART static linking
Detected 1 CUDA Capable device(s)
Device 0: "NVIDIA Tegra X1"
CUDA Driver Version / Runtime Version 10.2 / 10.2
CUDA Capability Major/Minor version number: 5.3
Total amount of global memory: 3956 MBytes (4148273152 bytes)
( 1) Multiprocessors, (128) CUDA Cores/MP: 128 CUDA Cores
GPU Max Clock rate: 922 MHz (0.92 GHz)
Memory Clock rate: 13 Mhz
Memory Bus Width: 64-bit
L2 Cache Size: 262144 bytes
Maximum Texture Dimension Size (x,y,z) 1D=(65536), 2D=(65536, 65536), 3D=(4096, 4096, 4096)
Maximum Layered 1D Texture Size, (num) layers 1D=(16384), 2048 layers
Maximum Layered 2D Texture Size, (num) layers 2D=(16384, 16384), 2048 layers
Total amount of constant memory: 65536 bytes
Total amount of shared memory per block: 49152 bytes
Total number of registers available per block: 32768
Warp size: 32
Maximum number of threads per multiprocessor: 2048
Maximum number of threads per block: 1024
Max dimension size of a thread block (x,y,z): (1024, 1024, 64)
Max dimension size of a grid size (x,y,z): (2147483647, 65535, 65535)
Maximum memory pitch: 2147483647 bytes
Texture alignment: 512 bytes
Concurrent copy and kernel execution: Yes with 1 copy engine(s)
Run time limit on kernels: Yes
Integrated GPU sharing Host Memory: Yes
Support host page-locked memory mapping: Yes
Alignment requirement for Surfaces: Yes
Device has ECC support: Disabled
Device supports Unified Addressing (UVA): Yes
Device supports Compute Preemption: No
Supports Cooperative Kernel Launch: No
Supports MultiDevice Co-op Kernel Launch: No
Device PCI Domain ID / Bus ID / location ID: 0 / 0 / 0
Compute Mode:
< Default (multiple host threads can use ::cudaSetDevice() with device simultaneously) >
deviceQuery, CUDA Driver = CUDART, CUDA Driver Version = 10.2, CUDA Runtime Version = 10.2, NumDevs = 1
Result = PASS
在 reComputer Jetson Nano 上运行 Docker
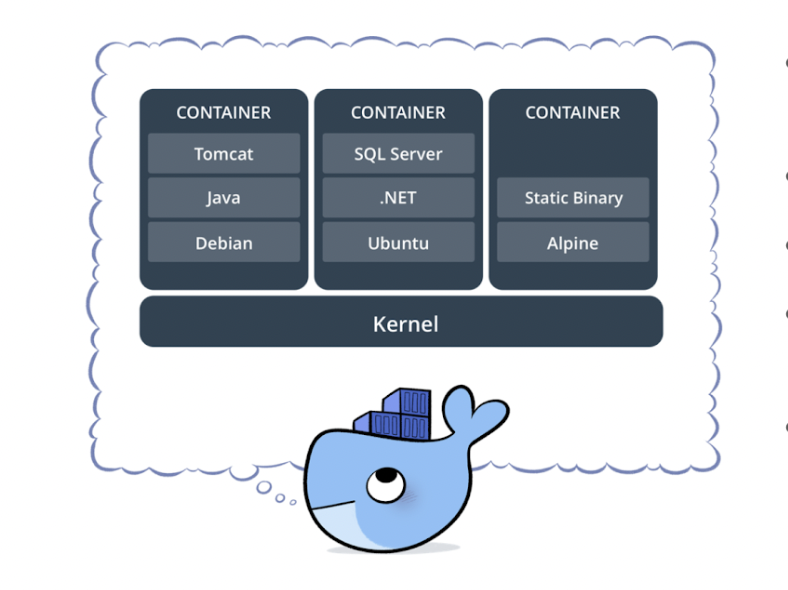
Docker 是一套用于创建、共享和运行独立容器的软件开发工具。它是一个容器化平台,将您的应用程序及其所有依赖项打包在一个 docker 容器中,以确保您的应用程序在任何环境中都能无缝运行。Docker 容器是一个标准化单元,可以即时创建以部署特定的应用程序或环境。
如今开发任何类型的应用程序都很复杂。这远不止是编写代码。有众多的编程语言、Web 框架、复杂的架构,以及每个生命周期阶段工具之间不连续的接口,这造成了巨大的复杂性。Docker 简化并加速了您的工作流程,同时让开发人员能够自由地为每个项目选择工具、应用程序堆栈和部署环境进行创新。它使您能够将应用程序与基础设施分离,从而快速交付软件。
Docker 在 reComputer J1020(一个由 Jetson Nano 驱动的开发套件)上得到官方支持。该套件默认预装了最新版本的 Docker。您可以通过运行以下命令来验证 Docker 的版本:
sudo docker version
Client: Docker Engine - Community
Cloud integration: v1.0.25
Version: 20.10.17
API version: 1.41
Go version: go1.17.11
Git commit: 100c701
Built: Mon Jun 6 23:02:19 2022
OS/Arch: linux/arm64
Context: default
Experimental: true
Server: Docker Engine - Community
Engine:
Version: 20.10.17
API version: 1.41 (minimum version 1.12)
Go version: go1.17.11
Git commit: a89b842
Built: Mon Jun 6 23:00:46 2022
OS/Arch: linux/arm64
Experimental: false
containerd:
Version: 1.6.6
GitCommit: 10c12954828e7c7c9b6e0ea9b0c02b01407d3ae1
runc:
Version: 1.1.2
GitCommit: v1.1.2-0-ga916309
docker-init:
Version: 0.19.0
GitCommit: de40ad0
安装 Docker Compose
reComputer Jetson 没有预装 Docker compose。您可以按照以下步骤在系统中安装 Docker Compose:
export DOCKER_COMPOSE_VERSION=2.6.0
sudo apt-get install libhdf5-dev
sudo apt-get install libssl-dev
sudo pip3 install docker-compose=="${DOCKER_COMPOSE_VERSION}"
apt install python3
apt install python3-pip
pip install docker-compose
安装最新版本的 CUDA 工具包
wget https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1804/sbsa/cuda-ubuntu1804.pin
sudo mv cuda-ubuntu1804.pin /etc/apt/preferences.d/cuda-repository-pin-600
wget https://developer.download.nvidia.com/compute/cuda/11.3.1/local_installers/cuda-repo-ubuntu1804-11-3-local_11.3.1-465.19.01-1_arm64.deb
sudo dpkg -i cuda-repo-ubuntu1804-11-3-local_11.3.1-465.19.01-1_arm64.deb
sudo apt-key add /var/cuda-repo-ubuntu1804-11-3-local/7fa2af80.pub
sudo apt-get update
sudo apt-get -y install cuda
Verify Docker runtime
docker info | grep runtime
Runtimes: nvidia runc io.containerd.runc.v2 io.containerd.runtime.v1.linuxs
运行您的第一个 Python 容器
让我们通过运行以下命令来测试一个简单的基于 Arm 的 Python Docker 镜像:
sudo docker run arm64v8/python:slim ls
使用 JTOP Docker 容器监控 CPU、GPU 和内存
在本节中,您将了解如何设置系统监控实用程序来监控 CPU、RAM 和 GPU。我们将使用 JTOP 实用程序。Jtop 是一个在终端上运行的系统监控实用程序,可以实时查看和控制您的 reComputer Jetson Nano 套件、CPU、RAM、GPU 状态和频率。您将了解如何将该实用程序容器化。让我们开始吧 –
首先,创建一个包含以下内容的 Dockerfile:
FROM python:3-alpine
RUN apk update \
&& apk --no-cache add bash \
&& pip install jetson-stats \
&& rm -rf /var/cache/apk/*
第一行显示我们选择了 python:3-alpine 作为基础镜像。第二行安装了 jetson-stats 和依赖包
构建 JTOP Docker 镜像
使用 docker build CLI 来构建 Docker 镜像
docker build -t ajeetraina/jetson-stats-nano .
运行 JTOP Docker 容器
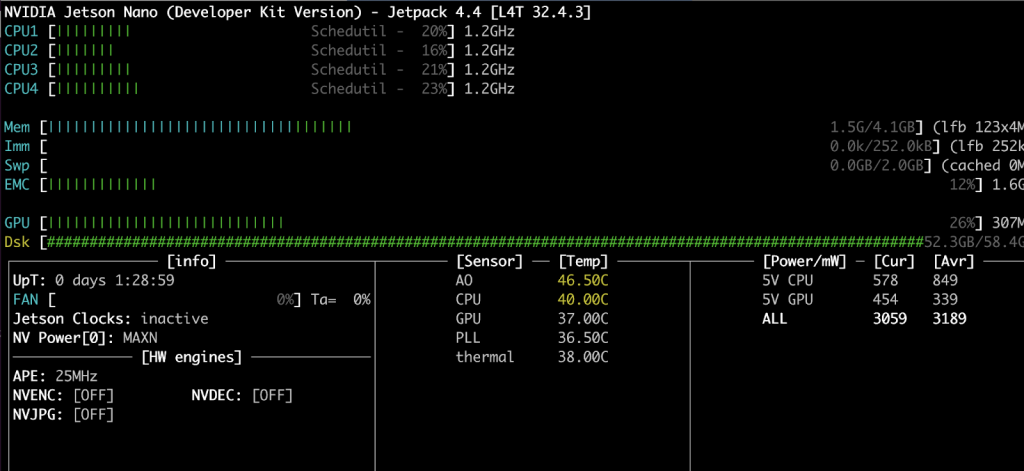
现在是时候通过传递 –gpus 作为参数并将其挂载到 jtop socket 来运行 Docker 容器了。
docker run --rm -it --gpus all -v /run/jtop.sock:/run/jtop.sock ajeetraina/jetson-stats-nano jtop
您将看到以下结果:
在我们的下一篇博客文章中,我们将看到如何使用运行在 Docker 容器内的 OpenDatacam 来实现车辆识别。敬请期待!
请查看以下带有教程的应用示例!
- Edge Impulse 行人检测
- 安全帽检测 并构建自定义 PPE 检测
- 使用 alwaysAI 进行姿态估计
- 使用 NVIDIA Deepstream IoT 进行视觉异常检测
- 零售店商品检测
- 野火检测
- 动物检测
关注 Ajeet:
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。