如何在 Lerobot 中使用 Lekiwi
本教程仓库代码保持为2025年6月5日之前的Lerobot经过测试的稳定版本,目前Huggingface对Lerobot进行了非常庞大的升级,增加了非常多的新功能,如果需要体验最新的教程请跟随官方文档进行操作。
简介
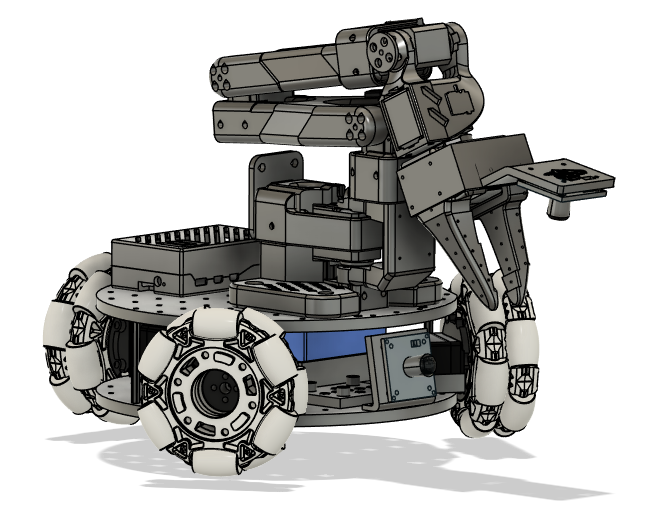
Lekiwi 是由 SIGRobotics-UIUC 发起的一个完全开源的机器人小车项目。它包含详细的 3D 打印文件和操作指南,设计上与 LeRobot 模仿学习框架兼容。它支持 SO101 机器人手臂,从而实现完整的模仿学习流程。
主要特点
- 开源且低成本: Lekiwi 提供了一种开源、低成本的机器人小车解决方案。
- 与 LeRobot 集成: 专为与 LeRobot 平台 集成而设计。
- 丰富的学习资源: 提供全面的开源学习资源,包括组装和校准指南,以及测试、数据收集、训练和部署的教程,帮助用户快速入门并开发机器人应用。
- 兼容 Nvidia: 可与 reComputer Mini J4012 Orin NX 16 GB 搭配使用。
- 多场景应用: 适用于教育、科学研究、自动化生产和机器人领域,帮助用户在各种复杂任务中实现高效且精准的机器人操作。
Seeed Studio 仅对硬件本身的质量负责。教程严格按照官方文档更新。如果您遇到无法解决的软件问题或环境依赖问题,请及时向 LeRobot 平台 或 LeRobot Discord 频道 报告问题。
-
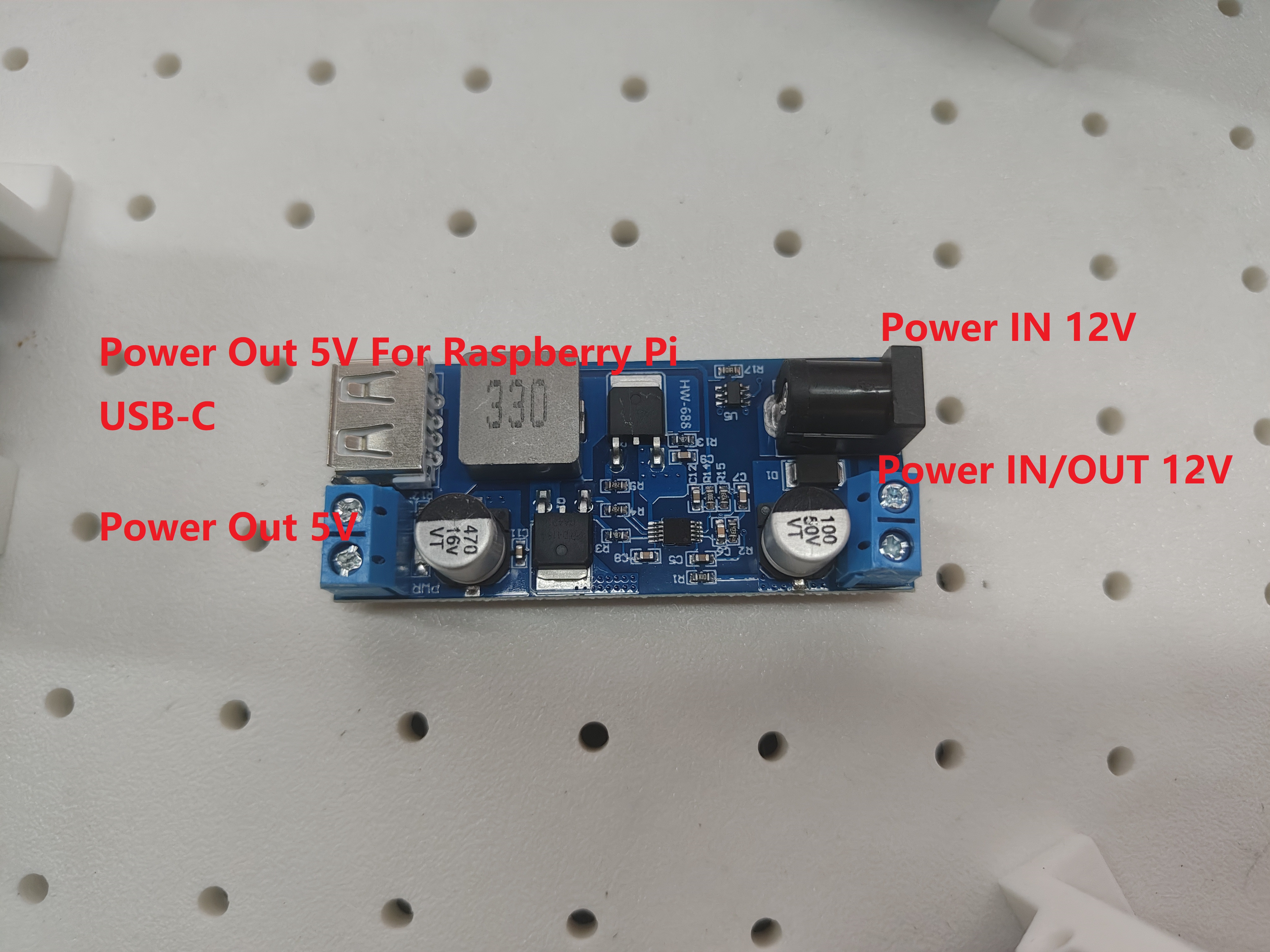
Lekiwi 底盘中的所有舵机需要 12V 电源供电。对于使用 5V 机器人手臂的用户,我们提供了 12V 转 5V 降压转换模块。请注意,您需要自行进行电路修改。
-
12V 电源 - 如果需要,您可以在结账时选择此选项。如果您已经拥有 12V 电源,只需将电源输出接口转换为 5521 DC 插头即可。
-
树莓派控制器和摄像头 - 这些需要通过订单界面单独购买。
规格
| 类型 | Lekiwi |
|---|---|
| 舵机电机 | 3个 12V STS3215 1:345 齿轮比 |
| 电源 | 12V DC 或电池 |
| 角度传感器 | 12位磁性编码器 |
| 推荐工作温度范围 | 0℃~40℃ |
| 通信方式 | UART |
| 控制方式 | PC |
物料清单 (BOM)
| 部件 | 数量 | 包含 |
|---|---|---|
| STS3215 1:345 12V 舵机电机 | 3 | ✅ |
| 全向轮/万向轮 | 3 | ✅ |
| Lekiwi 3D打印外壳 | 1 | ✅ |
| DC-DC 降压电源模块 - 24V/12V 转 5V | 1 | ✅ |
| 电机控制板 | 1 | ✅ |
| DC公头转双DC公头5521 Y型电缆 | 1 | ✅ |
| USB线缆;Type C 2.0 转 Type C 2.0-黑色;长度150mm | 1 | ✅ |
| USB 3.1 Type C 转 A线缆 0.5米 | 1 | ✅ |
| 插头电源适配器;黑色-12V-2A AC/DC | 1 | ✅ |
| M2 M3 M4 混合螺丝 | 足量 | ✅ |
| 树莓派 | 1 | 可选 |
| USB摄像头 | 1 | 可选 |
| 深度摄像头 | 2 | 可选 |
| SO-ARM101 Pro | 1 | 可选 |
| 12V 高容量锂离子电池组 E326S | 1 | 可选 |
初始系统环境
对于 Ubuntu x86:
- Ubuntu 22.04
- CUDA 12+
- Python 3.10
- Torch 2.6
对于 Jetson Orin:
- Jetson JetPack 6.0
- Python 3.10
- Torch 2.3+
对于树莓派:
- 树莓派5 4G~16G
目录
[A. 3D打印指南]
[B. 安装 LeRobot]
[C. 配置电机]
[D. 组装]
[E. 校准]
[F. 遥控操作]
[G. 添加摄像头]
[H. 记录数据集]
[I. 可视化数据集]
[J. 回放一个操作序列]
[K. 训练策略]
[L. 评估你的策略]
3D打印指南
部件
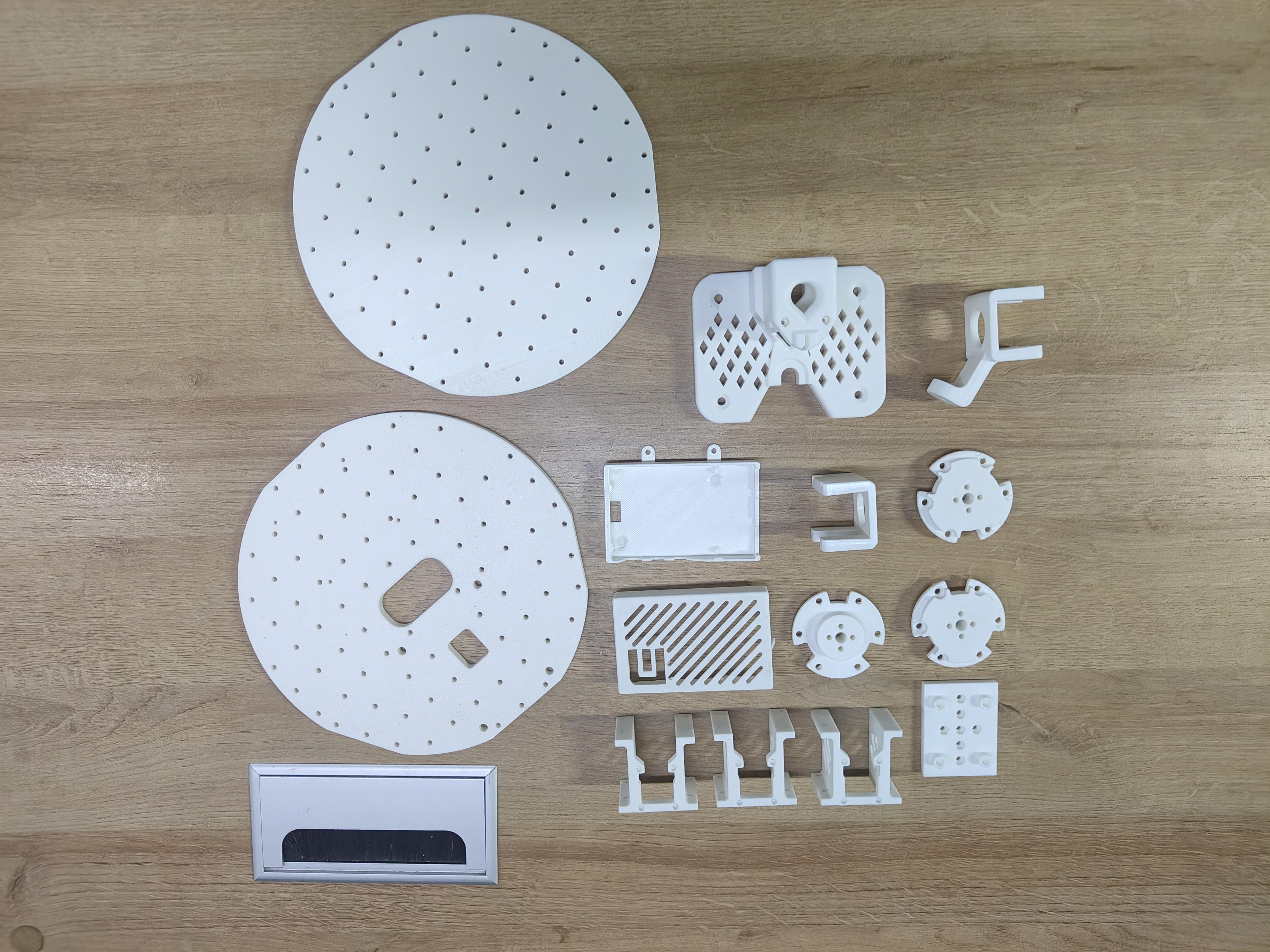
我们提供以下3D打印部件的可打印STL文件。这些部件可以使用通用PLA耗材在消费级FDM打印机上打印。我们在Bambu Lab P1S打印机上进行了测试。对于所有组件,我们只需加载到bambuslicer中,自动旋转和排列,启用任何推荐的支撑,然后打印。
| 项目 | 数量 | 备注 |
|---|---|---|
| 底板顶部 | 1 | |
| 底板底部 | 1 | |
| 驱动电机支架 | 3 | |
| 舵机轮毂 | 3 | 使用支撑 |
| 树莓派外壳顶部 | 1 | |
| 树莓派外壳底部 | 1 | |
| Arducam 底座支架 和 腕部支架 | 1 | 兼容 此摄像头 |
| 网络摄像头 底座支架、夹持器插入件 和 腕部支架 | 1 | 兼容 此摄像头 |
打印参数
提供的STL文件可以在许多FDM打印机上直接打印。以下是测试和建议的设置,其他设置也可能有效。
- 材料:PLA+
- 喷嘴直径和精度:0.2mm喷嘴直径,层高0.2mm
- 填充密度:15%
- 打印速度:150 mm/s
- 如果需要,将G代码(切片文件)上传到打印机并打印
安装 LeRobot
在您的 Raspberry Pi 上:
1. 安装 Miniconda:
mkdir -p ~/miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
2. 重启 Shell
在您的 Shell 中复制粘贴以下命令:source ~/.bashrc 或对于 Mac 用户:source ~/.bash_profile 或 source ~/.zshrc(如果您使用的是 zshell)
3. 为 LeRobot 创建并激活一个新的 Conda 环境
conda create -y -n lerobot python=3.10
然后激活您的 Conda 环境(每次打开 Shell 使用 LeRobot 时都需要执行此操作!):
conda activate lerobot
4. 克隆 LeRobot:
git clone https://github.com/huggingface/lerobot.git ~/lerobot
5. 在您的环境中安装 ffmpeg:
如果使用 miniconda,请在您的环境中安装 ffmpeg:
conda install ffmpeg -c conda-forge
6. 安装带有 feetech 电机依赖的 LeRobot:
cd ~/lerobot && pip install -e ".[lekiwi]"
C. 在笔记本电脑上安装 LeRobot
如果您已经在笔记本电脑上安装了 LeRobot,可以跳过此步骤,否则请按照我们在 Raspberry Pi 上的相同步骤进行操作。
[!提示] 我们会频繁使用命令提示符 (cmd)。如果您对使用 cmd 不熟悉,或者想复习命令行的使用,可以参考这里:命令行速成课程
在您的电脑上:
1. 安装 Miniconda:
2. 重启 Shell
在您的 Shell 中复制粘贴以下命令:source ~/.bashrc 或对于 Mac 用户:source ~/.bash_profile 或 source ~/.zshrc(如果您使用的是 zshell)
3. 为 LeRobot 创建并激活一个新的 Conda 环境
conda create -y -n lerobot python=3.10
然后激活您的 Conda 环境(每次打开 Shell 使用 LeRobot 时都需要执行此操作!):
conda activate lerobot
4. 克隆 LeRobot:
git clone https://github.com/huggingface/lerobot.git ~/lerobot
5. 在您的环境中安装 ffmpeg:
如果使用 miniconda,请在您的环境中安装 ffmpeg:
conda install ffmpeg -c conda-forge
6. 安装带有 feetech 电机依赖的 LeRobot:
cd ~/lerobot && pip install -e ".[lekiwi]"
配置电机

查找与机械臂相关联的 USB 端口 要找到单个电机的正确端口,请运行以下实用脚本两次:
lerobot-find-port
示例输出(例如,在 Mac 上为 /dev/tty.usbmodem575E0031751,或在 Linux 上可能为 /dev/ttyACM0):
示例输出(例如,在 Mac 上为 /dev/tty.usbmodem575E0032081,或在 Linux 上可能为 /dev/ttyACM1):
故障排除:在 Linux 上,您可能需要通过以下命令授予 USB 端口访问权限:
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1
配置您的电机
依次插入您的底盘的每一个电机并运行以下脚本,他会先初始化机械臂舵机6-1,然后再初始化底盘舵机,将其 ID 设置为 9-7,如果你已经校准过机械臂,可以连续按回车不断覆盖和跳过:
lerobot-setup-motors \
--robot.type=lekiwi \
--robot.port=/dev/tty.usbmodem58760431551 # <- paste here the port found at previous step
组装
组装 Lekiwi
您可以参考官方的组装教程。
收到打印部件后,所有打印组件如下图所示。
A. 使用 12 个 m2x6 自攻螺钉将驱动电机固定到电机支架上。
| 步骤 1 | 步骤 2 |
|---|---|
 |  |
B. 使用 12 个 m3x16 机器螺钉将驱动电机支架固定到底部底板上。
记住 ID 排列:8 代表后轮,7 和 9 分别对应左前轮和右前轮。
| 步骤 1 | 步骤 2 |
|---|---|
 |  |
C. 将轮毂安装到全向轮上。
步骤 1 和步骤 2:拆下三个螺钉。
| 步骤 1 | 步骤 2 |
|---|---|
 |  |
步骤 3 和步骤 4:使用 9 个 m4x18 机器螺钉将轮毂固定到全向轮上。
| 步骤 3 | 步骤 4 |
|---|---|
 |  |
D. 使用 6 个 m3x16 机器螺钉将舵机舵盘固定到轮毂上。
| 步骤 1 | 步骤 2 | 步骤 3 |
|---|---|---|
 |  |  |
E. 使用 3 个 m3x10 机器螺钉将舵机舵盘固定到驱动电机上。
| 步骤 1 | 步骤 2 | 步骤 3 |
|---|---|---|
 |  |  |
H. 添加舵机驱动器并连接所有电路。
| 步骤 1 | 步骤 2 | 步骤 3 | 步骤 4 |
|---|---|---|---|
 |  |  |  |
| 步骤 5 | 步骤 6 | 步骤 7 | 步骤 8 |
|---|---|---|---|
 |  |  |  |
电源输入直接连接到电源,如步骤 8 所示,而 USB-C 接口为树莓派提供 5V 电源。
对于额外的 2 针端子(5V 和 12V):
- 如果使用 7.4V SO10x 机械臂,通过 5V 输出为 舵机电机板供电。
- 如果使用 12V 机械臂,直接从 DC 电源分配器为 舵机电机板供电,如步骤 8 所示。
I. 现在可以将树莓派安装到车辆的第二层顶板上。在此之前,请连接 USB-C 电源线 和 USB-C 舵机通信线,然后将它们从车辆顶板的开口处引出。
步骤 1 将电源线连接到树莓派,并通过顶板中心的开口引出。
 |  |  |
步骤 2 在底盘的三个舵机中,有一个舵机仅连接了一根电缆。如果需要安装 SO10x 机械臂,请:移除机械臂的 ID1 电缆。将其连接到底盘电机。通过顶板引出作为备用电缆。
 |  |  |
步骤 3 现在可以将舵机驱动板的 USB-C 连接到树莓派的 USB 接口。
 |  |
J. 现在需要使用 12 M3×16 螺钉固定树莓派和顶板的其余部分。
 |  |  |
K. 现在您可以使用 1个 M3x16 和 4个 M5×25 螺钉安装 USB 摄像头和跟随臂
| |
|:---------:|:---------:|:---------:|:---------:|:---------:|:---------:|
|  |
|  |
|  | |
| |  |
|  |
|
并确保伺服控制电缆和 USB 摄像头都已连接到树莓派。
|
更新配置
LeKiwi LeRobot 和笔记本电脑上的配置文件应保持一致。首先,我们需要找到移动机械臂的树莓派的 IP 地址。这与用于 SSH 的 IP 地址相同。我们还需要找到笔记本电脑上主臂控制板的 USB 端口以及 LeKiwi 上控制板的端口。可以通过以下脚本找到这些端口。
在 Linux 上,您可能需要通过运行以下命令来授予 USB 端口的访问权限:
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1
重要提示:现在您已经获得了主臂和跟随臂的端口以及移动机械臂的 IP 地址,请在网络配置中更新 ip,在主臂配置中更新 port,并在 LeKiwi 配置中更新 port。在 LeKiwiRobotConfig 文件中,您会看到如下内容:
@RobotConfig.register_subclass("lekiwi")
@dataclass
class LeKiwiRobotConfig(RobotConfig):
# `max_relative_target` 限制了相对位置目标向量的大小,以确保安全。
# 将其设置为一个正标量以对所有电机使用相同的值,或者设置为一个列表,其长度与跟随臂中的电机数量相同。
max_relative_target: int | None = None
# 网络配置
ip: str = "172.17.133.91"
port: int = 5555
video_port: int = 5556
cameras: dict[str, CameraConfig] = field(
default_factory=lambda: {
"mobile": OpenCVCameraConfig(camera_index="/dev/video0", fps=30, width=640, height=480),
"mobile2": OpenCVCameraConfig(camera_index="/dev/video2", fps=30, width=640, height=480),
}
)
calibration_dir: str = ".cache/calibration/lekiwi"
leader_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": FeetechMotorsBusConfig(
port="/dev/tty.usbmodem585A0077581",
motors={
# 名称: (索引, 型号)
"shoulder_pan": [1, "sts3215"],
"shoulder_lift": [2, "sts3215"],
"elbow_flex": [3, "sts3215"],
"wrist_flex": [4, "sts3215"],
"wrist_roll": [5, "sts3215"],
"gripper": [6, "sts3215"],
},
),
}
)
follower_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": FeetechMotorsBusConfig(
port="/dev/ttyACM0",
motors={
# 名称: (索引, 型号)
"shoulder_pan": [1, "sts3215"],
"shoulder_lift": [2, "sts3215"],
"elbow_flex": [3, "sts3215"],
"wrist_flex": [4, "sts3215"],
"wrist_roll": [5, "sts3215"],
"gripper": [6, "sts3215"],
"left_wheel": (7, "sts3215"),
"back_wheel": (8, "sts3215"),
"right_wheel": (9, "sts3215"),
},
),
}
)
teleop_keys: dict[str, str] = field(
default_factory=lambda: {
# 移动
"forward": "w",
"backward": "s",
"left": "a",
"right": "d",
"rotate_left": "z",
"rotate_right": "x",
# 速度控制
"speed_up": "r",
"speed_down": "f",
# 退出遥控
"quit": "q",
}
)
mock: bool = False
有线版本
对于有线的 LeKiwi 版本,您配置的 IP 地址应指向您自己的笔记本电脑(127.0.0.1),因为在这种情况下,主控臂和 LeKiwi 都连接到自己的笔记本电脑。以下是此有线设置的示例配置:
@RobotConfig.register_subclass("lekiwi")
@dataclass
class LeKiwiRobotConfig(RobotConfig):
# `max_relative_target` 限制了相对位置目标向量的大小,以确保安全。
# 将其设置为一个正标量以为所有电机设置相同的值,或者设置为一个列表,其长度与从动臂中的电机数量相同。
max_relative_target: int | None = None
# 网络配置
ip: str = "127.0.0.1"
port: int = 5555
video_port: int = 5556
cameras: dict[str, CameraConfig] = field(
default_factory=lambda: {
"front": OpenCVCameraConfig(
camera_index=0, fps=30, width=640, height=480, rotation=90
),
"wrist": OpenCVCameraConfig(
camera_index=1, fps=30, width=640, height=480, rotation=180
),
}
)
calibration_dir: str = ".cache/calibration/lekiwi"
leader_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": FeetechMotorsBusConfig(
port="/dev/tty.usbmodem585A0077581",
motors={
# 名称: (索引, 型号)
"shoulder_pan": [1, "sts3215"],
"shoulder_lift": [2, "sts3215"],
"elbow_flex": [3, "sts3215"],
"wrist_flex": [4, "sts3215"],
"wrist_roll": [5, "sts3215"],
"gripper": [6, "sts3215"],
},
),
}
)
follower_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": FeetechMotorsBusConfig(
port="/dev/tty.usbmodem58760431061",
motors={
# 名称: (索引, 型号)
"shoulder_pan": [1, "sts3215"],
"shoulder_lift": [2, "sts3215"],
"elbow_flex": [3, "sts3215"],
"wrist_flex": [4, "sts3215"],
"wrist_roll": [5, "sts3215"],
"gripper": [6, "sts3215"],
"left_wheel": (7, "sts3215"),
"back_wheel": (8, "sts3215"),
"right_wheel": (9, "sts3215"),
},
),
}
)
teleop_keys: dict[str, str] = field(
default_factory=lambda: {
# 移动
"forward": "w",
"backward": "s",
"left": "a",
"right": "d",
"rotate_left": "z",
"rotate_right": "x",
# 速度控制
"speed_up": "r",
"speed_down": "f",
# 退出遥控
"quit": "q",
}
)
mock: bool = False
校准
现在我们需要校准主控臂和从动臂。轮子电机无需校准。
校准从动臂(安装在移动底座上)
在您的电脑上运行以下命令以校准主控机器人臂。注意:这里显示的图片是 SO101 型号的示例。
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--robot.cameras='{}' \
--control.type=calibrate \
--control.arms='["main_leader"]'
| 主控中间位置 | 主控零位位置 | 主控旋转位置 | 主控休息位置 |
|---|---|---|---|
 |  |  |  |
现在在您的 Raspberry Pi 上运行以下命令以校准 LeKiwi 上的从动臂。忽略它当前在桌上的位置——正常校准应在安装到车辆上时进行。
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--robot.cameras='{}' \
--control.type=calibrate \
--control.arms='["main_follower"]'
| 从动中间位置 | 从动零位位置 | 从动旋转位置 | 从动休息位置 |
|---|---|---|---|
 |  |  |  |
F. 远程操作
[!TIP] 如果您使用的是 Mac,可能需要授予终端访问键盘的权限。请前往系统偏好设置 > 安全与隐私 > 输入监控,并勾选终端的选项。
要进行远程操作,请通过 SSH 登录到您的 Raspberry Pi,并运行以下命令激活环境 conda activate lerobot,然后运行以下脚本:
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--control.type=remote_robot
接着,在您的笔记本电脑上,也运行以下命令激活环境 conda activate lerobot,然后运行以下脚本:
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--control.type=teleoperate \
--control.fps=30
注意: 如果需要可视化数据,请启用
--control.display_data=true。这将使用rerun流式传输数据。对于--control.type=remote_robot,您还需要设置--control.viewer_ip和--control.viewer_port。
您应该在笔记本电脑上看到类似以下的信息:[INFO] Connected to remote robot at tcp://172.17.133.91:5555 and video stream at tcp://172.17.133.91:5556. 现在,您可以移动主控臂并使用键盘(w,a,s,d)进行前进、左转、后退、右转操作。使用(z,x)进行左转或右转。使用(r,f)来增加或减少移动机器人的速度。机器人有三种速度模式,详见下表:
| 速度模式 | 线速度 (m/s) | 旋转速度 (度/秒) |
|---|---|---|
| 快速 | 0.4 | 90 |
| 中速 | 0.25 | 60 |
| 慢速 | 0.1 | 30 |
| 按键 | 动作 |
|---|---|
| W | 前进 |
| A | 左移 |
| S | 后退 |
| D | 右移 |
| Z | 左转 |
| X | 右转 |
| R | 增加速度 |
| F | 减少速度 |
[!TIP] 如果您使用不同的键盘,可以在
LeKiwiRobotConfig中更改每个命令的按键设置。
有线版本
如果您使用的是 有线 LeKiwi 版本,请在笔记本电脑上运行所有命令,包括这两个远程操作命令。
通信故障排查
如果您在连接移动机器人 SO100 时遇到问题,请按照以下步骤诊断并解决问题。
1. 验证 IP 地址配置
确保配置文件中设置了正确的 Raspberry Pi IP 地址。要检查 Raspberry Pi 的 IP 地址,请运行以下命令(在 Pi 的命令行中):
hostname -I
2. 检查笔记本电脑/PC 是否能访问 Pi
尝试从笔记本电脑 ping Raspberry Pi:
ping <your_pi_ip_address>
如果 ping 失败:
- 确保 Pi 已开机并连接到同一网络。
- 检查 Pi 上是否启用了 SSH。
3. 尝试 SSH 连接
如果无法通过 SSH 登录到 Pi,可能是连接不正确。请使用以下命令:
ssh <your_pi_user_name>@<your_pi_ip_address>
如果出现连接错误:
- 确保 Pi 上启用了 SSH,可以运行以下命令:
然后导航到:Interfacing Options -> SSH 并启用它。
sudo raspi-config
4. 配置文件一致性
确保笔记本电脑/PC 和 Raspberry Pi 上的配置文件完全一致。
G. 记录数据集
在熟悉远程操作后,您可以使用 LeKiwi 记录您的第一个数据集。
要在 LeKiwi 上启动程序,请通过 SSH 连接到您的 Raspberry Pi,并运行以下命令以激活环境并启动脚本:
conda activate lerobot
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--control.type=remote_robot
如果您希望使用 Hugging Face hub 功能上传数据集,并且之前尚未登录,请确保使用写入权限的令牌登录,该令牌可以从 Hugging Face 设置 中生成:
huggingface-cli login --token ${HUGGINGFACE_TOKEN} --add-to-git-credential
将您的 Hugging Face 仓库名称存储在变量中以运行以下命令:
HF_USER=$(huggingface-cli whoami | head -n 1)
echo $HF_USER
然后在您的笔记本电脑上运行以下命令以记录 2 个回合并将数据集上传到 hub:
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--control.type=record \
--control.fps=30 \
--control.single_task="抓取一个乐高积木并将其放入垃圾桶。" \
--control.repo_id=${HF_USER}/lekiwi_test \
--control.tags='["tutorial"]' \
--control.warmup_time_s=5 \
--control.episode_time_s=30 \
--control.reset_time_s=30 \
--control.num_episodes=2 \
--control.push_to_hub=true
注意:您可以通过添加 --control.resume=true 来继续记录。
有线版本
如果您使用的是 有线 LeKiwi 版本,请在您的笔记本电脑上运行所有命令,包括上述记录数据集的命令。
H. 可视化数据集
如果您使用 --control.push_to_hub=true 上传了数据集,可以通过 在线可视化您的数据集,复制并粘贴以下命令生成的仓库 ID:
echo ${HF_USER}/lekiwi_test
如果您没有使用 --control.push_to_hub=false 上传数据集,也可以在本地进行可视化(浏览器窗口可以通过 http://127.0.0.1:9090 打开可视化工具):
python lerobot/scripts/visualize_dataset_html.py \
--repo-id ${HF_USER}/lekiwi_test \
--local-files-only 1
I. 回放一个回合
现在尝试在您的机器人上回放第一个回合:
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--control.type=replay \
--control.fps=30 \
--control.repo_id=${HF_USER}/lekiwi_test \
--control.episode=0
J. 训练策略
要训练控制机器人策略,请使用 python lerobot/scripts/train.py 脚本。需要提供一些参数。以下是示例命令:
python lerobot/scripts/train.py \
--dataset.repo_id=${HF_USER}/lekiwi_test \
--policy.type=act \
--output_dir=outputs/train/act_lekiwi_test \
--job_name=act_lekiwi_test \
--policy.device=cuda \
--wandb.enable=true
以下是命令的解释:
- 我们通过
--dataset.repo_id=${HF_USER}/lekiwi_test提供了数据集作为参数。 - 我们通过
policy.type=act提供了策略。这会从configuration_act.py加载配置。重要的是,该策略会自动适应您的机器人(例如laptop和phone)的数据集中保存的电机状态、电机动作和摄像头数量。 - 我们通过
policy.device=cuda指定在 Nvidia GPU 上训练,但您也可以使用policy.device=mps在 Apple Silicon 上训练。 - 我们通过
wandb.enable=true启用了 Weights and Biases 用于可视化训练图表。这是可选的,但如果您使用它,请确保通过运行wandb login登录。
训练可能需要几个小时。您将在 outputs/train/act_lekiwi_test/checkpoints 中找到检查点文件。
K. 评估你的策略
你可以使用 lerobot/scripts/control_robot.py 中的 record 函数,但需要提供策略检查点作为输入。例如,运行以下命令记录 10 个评估回合:
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--control.type=record \
--control.fps=30 \
--control.single_task="驱动到红色方块并拾取它" \
--control.repo_id=${HF_USER}/eval_act_lekiwi_test \
--control.tags='["教程"]' \
--control.warmup_time_s=5 \
--control.episode_time_s=30 \
--control.reset_time_s=30 \
--control.num_episodes=10 \
--control.push_to_hub=true \
--control.policy.path=outputs/train/act_lekiwi_test/checkpoints/last/pretrained_model
如你所见,这几乎与之前用于记录训练数据集的命令相同。两点有所不同:
- 增加了一个
--control.policy.path参数,用于指示策略检查点的路径(例如outputs/train/eval_act_lekiwi_test/checkpoints/last/pretrained_model)。如果你已将模型检查点上传到 Hub,也可以使用模型仓库路径(例如${HF_USER}/act_lekiwi_test)。 - 数据集的名称以
eval开头,以反映你正在运行推理(例如${HF_USER}/eval_act_lekiwi_test)。
帮助 🙋
对于硬件问题,请联系客户服务。对于使用问题,请加入 Discord。
技术支持与产品讨论
感谢您选择我们的产品!我们致力于为您提供多种支持,以确保您使用我们的产品时体验顺畅。我们提供多个沟通渠道,以满足不同的偏好和需求。